Изобретение относится к области автомобилестроения и предназначено для использования в электромеханических системах рулевого управления транспортных средств повышенной проходимости и грузоподъемности.
Известен сервопривод системы рулевого управления [1] с регулированием тока электродвигателя в соответствии с выходным сигналом блока задания, в котором сигнал с датчика момента, прикладываемого водителем к рулевому колесу, преобразуется с коэффициентом передачи, изменяющимся в зависимости от скорости автомобиля.
Недостатком этого сервопривода, наиболее заметным в случае его использования на автомобилях с высокой проходимостью и грузоподъемностью, является существование зависимости установившегося момента, прикладываемого водителем к рулевому колесу, от текущих значений сил трения в рулевом механизме и момента сопротивления повороту управляемых колес, действующего на них со стороны дороги.
Задачей, на решение которой направлено создание предлагаемого изобретения, является обеспечение удобства управления автомобилем с высокой проходимостью и грузоподъемностью за счет поддержания установившегося значения момента, прикладываемого водителем к рулевому колесу, на заданном постоянном уровне, не зависящем от изменяющихся дорожных условий и технического состояния транспортного средства.
Указанная задача решается тем, что в сервоприводе системы рулевого управления, содержащем датчик момента на рулевом колесе, последовательно соединенные элемент сравнения, регулятор тока и электродвигатель, в котором выход регулятора тока связан со входом измерителя фактического тока электродвигателя, выход которого подключен к первому входу элемента сравнения, выход датчика момента через нелинейное звено соединен с пропорционально-интегральным регулятором, выход которого связан со вторым входом элемента сравнения и вторым входом нелинейности.
Предусмотрено, что упомянутое нелинейное звено включает в себя три параллельных канала и сумматор, каждый канал содержит компаратор, усилительное звено и множительное устройство с двумя входами, причем в каждом указанном канале выходы усилительного звена и компаратора соединены с соответствующими входами множительного устройства, входы всех усилительных звеньев соединены и являются входом нелинейного звена, выходы всех множительных устройств соединены со входами сумматора, выход которого является выходом нелинейного звена, причем в первом канале усилительное звено имеет зону нечувствительности, равную заданному установившемуся значению момента, прикладываемому водителем к рулевому колесу, а передаточная характеристика компаратора такова, что единичный уровень на его выходе соответствует входному сигналу, абсолютное значение которого меньше установленного порога срабатывания, определяемого уровнем собственных шумов и дрейфа нуля схемы, во втором и третьем каналах усилительные звенья имеют линейные передаточные характеристики, смещенные по оси абсцисс на значение, равное указанной зоне нечувствительности, соответственно в положительную и отрицательную стороны, а передаточные характеристики компараторов таковы, что единичный уровень на выходе соответствует входному сигналу, большему положительного значения упомянутого порога срабатывания и меньшему отрицательного значения этого порога соответственно.
На фиг. 1 изображена функциональная схема сервопривода системы рулевого управления, на которой:
1 - датчик момента, прикладываемого водителем к рулевому колесу;
2 - нелинейное звено;
3 - пропорционально-интегральный регулятор;
4 - элемент сравнения;
5 - регулятор тока электродвигателя;
6 - электродвигатель сервопривода;
7 - измеритель фактического значения тока электродвигателя.
На основе значения Т момента на руле, поступающего с датчика момента 1 через нелинейное звено 2 на пропорционально-интегральный регулятор 3, последний вырабатывает сигнал Iзад задания, с которым сравнивается сигнал Iос обратной связи, сформированный из текущего значения Iдв тока электродвигателя измерителем фактического значения тока электродвигателя 7. Полученная в устройстве сравнения 4 разность ΔI = Iзад-Iос используется регулятором тока 5 для управления током электродвигателя 6 так, что фактическое значение Iдв повторяет заданное Iзад.
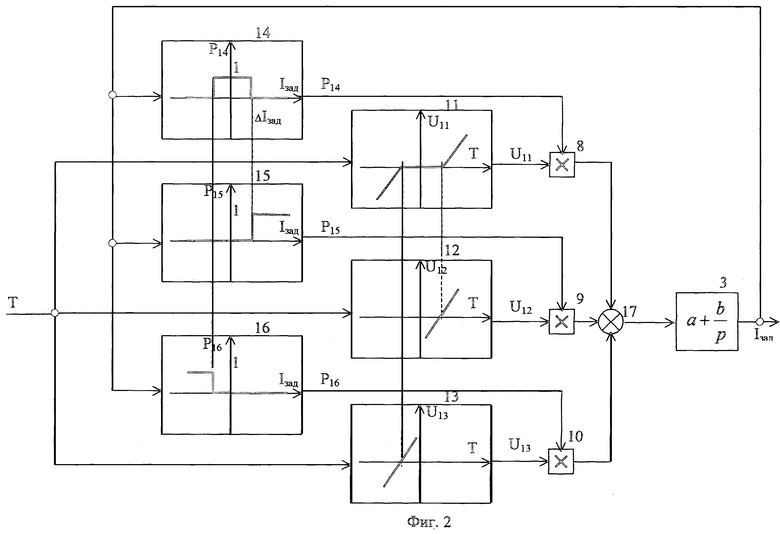
На фиг. 2 показана развернутая схема включения нелинейного звена 2 и пропорционально-интегрального регулятора задания 3. На схеме обозначены:
3 - пропорционально-интегральный регулятор, в котором а и b -коэффициенты составляющих регулятора;
8, 9,10 - множительные устройства;
11, 12, 13 - компоненты нелинейного звена, образующие три канала преобразования входного сигнала Т в выходной сигнал Iзад;
14, 15, 16 - компараторы;
17 - сумматор.
Схема работает следующим образом.
В исходном, нейтральном состоянии привода, соответствующем произвольному положению свободно отпущенного неподвижного рулевого колеса, момент Т = 0 и заданное значение тока электродвигателя Iзад = 0, при этом на выходе компаратора 14 сигнал Р14 = 1 и к пропорционально-интегральному регулятору 3 подключено усилительное звено 11. На выходах компараторов 15 и 16 сигналы Р15 = 0, Р16 = 0 и усилительные звенья 12 и 13 отключены.
Пусть при повороте рулевого колеса в любую сторону от исходного свободного положения момент Т, развиваемый водителем, по абсолютной величине не превосходит заданного максимального значения Тмакс: |T|≤Tмакс. Тогда, в соответствии с видом нелинейности усилительного звена 11, сигнал U11 = 0 и в схеме сохраняется исходное значение Iзад = 0, т.е. сервопривод рулевого управления не включается и поворот управляемых колес осуществляется только за счет усилия, прикладываемого к рулевому колесу водителем.
Если по мере поворота рулевого колеса, например, по часовой стрелке, момент Т, прикладываемый водителем, возрастает настолько, что выполнится условие Т > Тмакс, то на выходе усилительного звена 11 появляется сигнал U11 > 0, из которого пропорционально-интегральный регулятор 3 сформирует положительное значение Iзад с постоянно растущей во времени интегральной составляющей.
Как только Iзад превысит некоторое малое значение ΔIзад, определяемое уровнем собственных шумов и дрейфа нуля схемы, компаратор 14 отключает усилительное звено 11 и сработает компаратор 15, в результате чего Iзад будет продолжать увеличиваться под действием сигнала U12 = Т - Тмакс, формируемого усилительным звеном 12.
В то же время увеличение задаваемого значения тока Тзад приведет к росту момента, развиваемого сервоприводом, и соответствующему снижению той части общего требуемого момента на управляемых колесах, которая обеспечивается усилием Т, прикладываемым к рулевому колесу водителем. Снижение Т приведет к установлению равенства Т = Тмакс; в результате сигнал U12 примет нулевое значение и рост Iзад прекратится.
Таким образом, установившийся режим в системе управления будет характеризоваться постоянным значением момента Т, прикладываемого водителем к рулевому колесу, при этом Т = Тмакс, U12 = 0 и интегральная составляющая Iзад автоматически принимает такое значение, которое необходимо для требуемого поворота и удержания управляемых колес в нужном положении при движении автомобиля.
В режиме поворота управляемых колес на месте работа схемы совпадает с режимом поворота в движении до тех пор, пока водитель прикладывает усилие к рулевому колесу. После завершения поворота колес на месте и снятия усилия с руля момент Т = 0, U12 становится отрицательным и сигнал Iзад, а следовательно, и момент сервопривода начинают непрерывно уменьшаться. При достижении уровня Iзад≤ΔIзад появятся сигналы Р15 = 0 и Р14 = 1, т.е. произойдет переключение схемы с усилительного звена 12 на усилительное звено 11, и привод придет в нейтральное, нулевое состояние, при этом рулевое колесо и управляемые колеса останутся в заданном повернутом положении.
При повороте рулевого колеса из свободного состояния против часовой стрелки вступают в работу компаратор 16 и усилительное звено 13 и происходят процессы, аналогичные описанным выше.
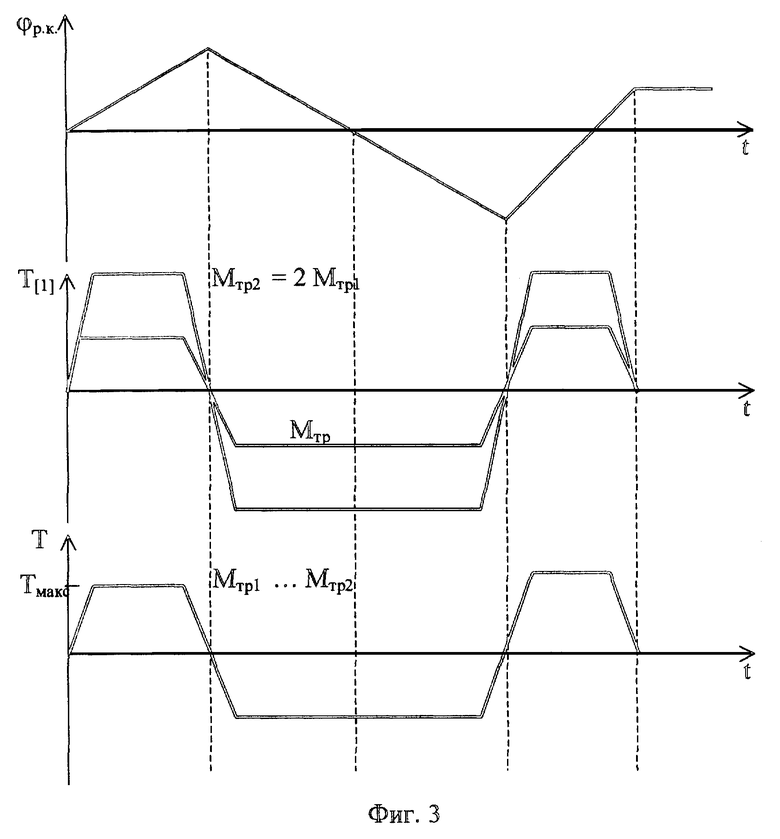
На фиг.3 иллюстрируется изменение во времени t момента Т на рулевом колесе при повороте управляемых колес на месте с использованием предлагаемого сервопривода в сравнении с приводом, описанным в [1].:
ϕp.к.- угол поворота рулевого колеса;
Мmр - суммарный момент трения, преодолеваемый сервоприводом;
Т[1], Т- моменты, прикладываемые водителем к рулевому колесу в известном [1] и в предлагаемом сервоприводах соответственно.
Диаграммы на фиг.3 показывают, что в режиме поворота колес на месте установившийся момент Т, прикладываемый водителем к рулевому колесу, в предлагаемом приводе остается постоянным независимо от текущих суммарных значений сил трения в рулевом механизме и момента сопротивления повороту управляемых колес со стороны дороги, преодолеваемых сервоприводом.
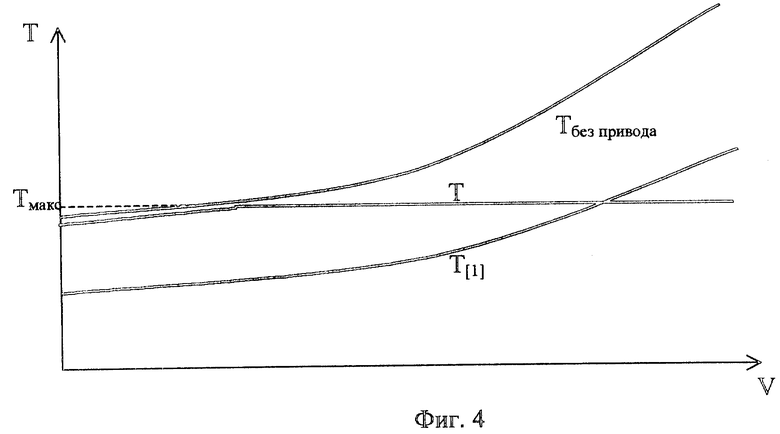
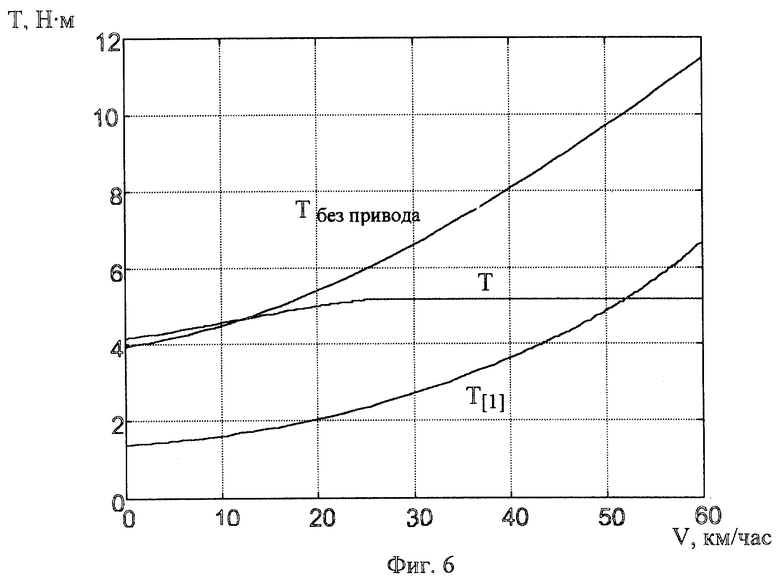
На фиг. 4 показаны характеристики сравниваемых сервоприводов в режиме движения автомобиля, где Тбезпривода, Т[1], Т - моменты, необходимые для удержания рулевого колеса в положении 90 градусов при различной скорости V движения автомобиля с системой управления без сервопривода, с приводом [1] и с предлагаемым сервоприводом соответственно. Из фиг.4 следует, что использование предлагаемого привода ограничивает максимальный момент на руле на заданном постоянном уровне в широком диапазоне скоростей движения автомобиля.
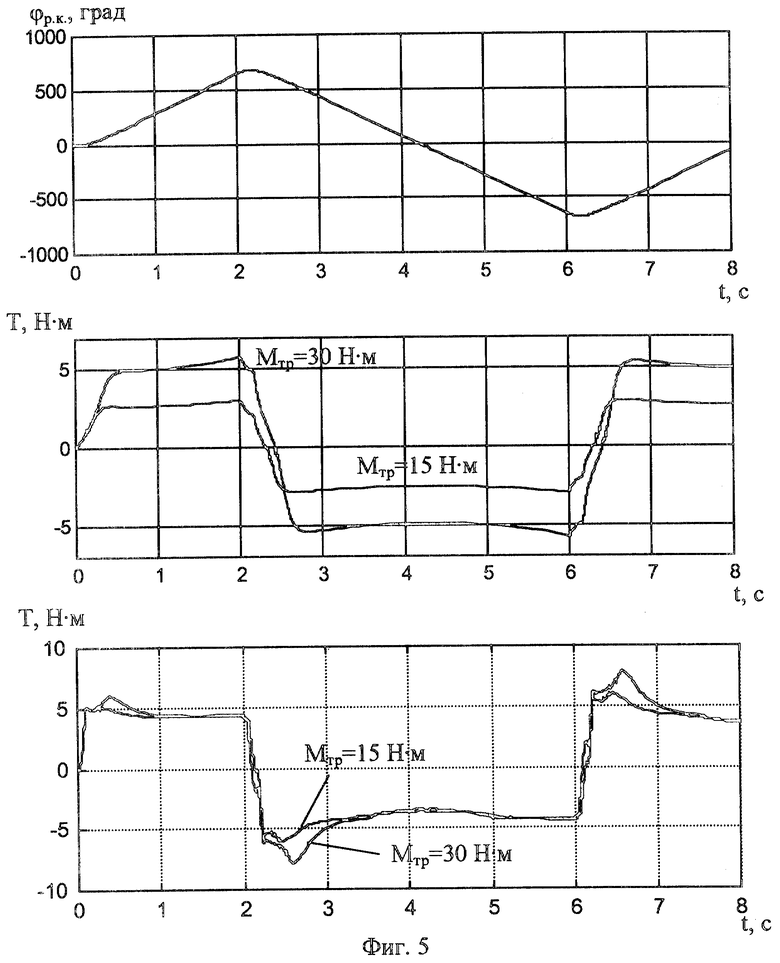
На фиг. 5 и 6 представлены те же характеристики, что и на фиг.3 и 4, но полученные авторами на математической модели реальной системы рулевого управления автомобиля типа "джип".
Литература
1. Пат. США 5659473, кл. В 62 D 5/04 от 19.08.97, Noro и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД СИСТЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ | 2000 |
|
RU2185988C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2001 |
|
RU2216096C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ИЗБЫТОЧНОЙ МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ | 2000 |
|
RU2199808C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ | 2001 |
|
RU2199752C2 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2202147C2 |
| СЕРВОПРИВОД РУЛЕВОГО МЕХАНИЗМА АВТОМОБИЛЯ И РЕГУЛЯТОР ТОКА ЭЛЕКТРОДВИГАТЕЛЯ | 2000 |
|
RU2185301C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ИЗБЫТОЧНОЙ МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ | 2001 |
|
RU2211480C2 |
| СЕРВОПРИВОД РУЛЕВОГО МЕХАНИЗМА АВТОМОБИЛЯ И РЕГУЛЯТОР ТОКА ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2219085C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2001 |
|
RU2219649C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ТРАНСФОРМАЦИИ ОБМОТОК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2000 |
|
RU2191397C2 |
Изобретение относится к области автомобилестроения и предназначено для использования в электромеханических системах рулевого управления транспортных средств повышенной проходимости и грузоподъемности. Сервопривод содержит датчик момента на рулевом колесе, последовательно соединенные элемент сравнения, регулятор тока и электродвигатель. Выход регулятора тока связан со входом измерителя фактического значения тока электродвигателя, выход которого подключен к первому входу элемента сравнения. При этом выход датчика момента через нелинейное звено соединен с пропорционально-интегральным регулятором, выход которого связан со вторым входом элемента сравнения и вторым входом нелинейного звена. Нелинейное звено включает в себя три параллельных канала и сумматор. Каждый канал содержит компаратор, усилительное звено и множительное устройство с двумя входами. В каждом канале выходы усилительного звена и компаратора соединены с соответствующими входами множительного устройства, входы всех усилительных звеньев соединены и являются входом нелинейного звена, выходы всех множительных устройств соединены со входами сумматора, выход которого является выходом нелинейного звена. Наличие трех каналов в нелинейном звене обеспечивает постоянство момента на руле независимо от текущих суммарных значений сил трения в рулевом механизме и момента сопротивления повороту управляемых колес со стороны дороги, преодолеваемых сервоприводом. 1 з.п.ф-лы, 6 ил.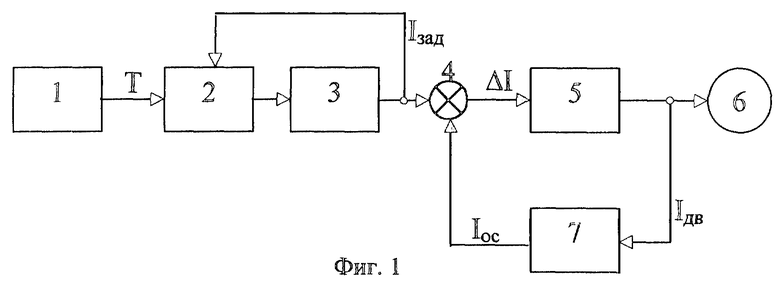
| US 5659473 А, 19.08.1997 | |||
| ОПОРА МОСТА | 1999 |
|
RU2145988C1 |
| DE 3917053 A1, 07.12.1989. | |||

