Изобретение относится к железнодорожному транспорту, а именно к токоприемникам электроподвижного состава, и может быть использовано на электропоездах и электровозах.
Известен асимметричный токоприемник, имеющий токосъемный узел, установленный на полупантографе, содержащем сочлененные нижнюю и верхнюю подвижные рамы, шарнирно связанные с изолированным основанием и торсионом, связанным одним концом с основанием, а другим через звенчатую тягу, имеющую механизм регулировки контактного нажатия в одном из ее звеньев, с рычагом в виде кулачка, расположенным на нижней подвижной раме, причем торсион имеет энергоемкость, достаточную для преодоления сил сопротивления по подъему подвижных частей токоприемника и прижатию токосъемного узла заданным усилием к контактному проводу, а подъемно-опускающий механизм выполнен с возможностью преодоления указанной энергоемкости торсиона и удержания токоприемника заданным усилием в сложенном положении [патент RU №2272720].
Недостатками данного токоприемника являются сложность кинематической схемы токоприемника, большое число шарниров в ней, что обуславливает повышенную величину сил трения в шарнирах и увеличивает массу токоприемника. Данная конструкция токоприемника не обеспечивает его плавного подъема и опускания, в результате чего при подъеме могут быть удары токосъемного узла о контактный провод с изломом токосъемных элементов. Асимметричная конструкция с жестко закрепленными аэродинамическими экранами обеспечивает равенство статических характеристик при движении в разных направлениях только при одной скорости. Эти факты негативно сказываются на качестве токосъема.
Технической задачей предлагаемого устройства является устранение указанных недостатков и повышение качества токосъема.
Данная техническая задача решается в устройстве асимметричного токоприемника согласно изобретению, в котором система подрессоривания выполнена в виде одного торсиона, связанного одним концом с основанием, а другим через жестко закрепленный на торсионе рычаг с тросиком, проходящим внутри нижней и верхней рам через ролики, установленные в местах сочленения рам, крепящемся к штоку токосъемного узла, причем торсион имеет энергоемкость, достаточную для преодоления сил сопротивления по подъему подвижных частей токоприемника и прижатию токосъемного узла заданным усилием к контактному проводу, а подъемно-опускающий механизм выполнен с возможностью преодоления указанной энергоемкости торсиона и удержания токоприемника заданным усилием в сложенном положении. Горизонтальность рабочей поверхности токосъемного узла при всех его высотах обеспечивается за счет упругого вращения токосъемного узла, обусловленного спиральной пружиной, вокруг его шарнирного крепления к верхней раме, а также силы тяги тросика, закрепленного на штоке токосъемного узла.
Для компенсации аэродинамической подъемной силы, возникающей при движении токоприемника коленом вперед, обусловленной асимметричной конструкцией токоприемника, токосъемный узел снабжен двумя аэродинамическими экранами, расположенными на каретке.
Для плавного подъема токоприемника с целью исключения удара токосъемного узла о контактный провод и последующего его отрыва, а также плавного опускания токоприемника с целью исключения удара его элементов об упоры, установленные на основании, на входе пневмопривода имеется редукционное устройство.
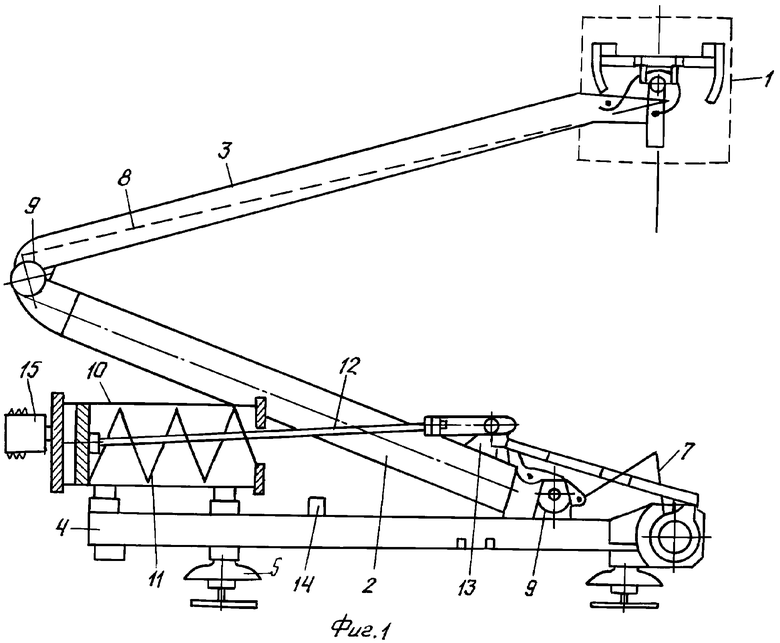
На фиг.1 представлен общий вид токоприемника, на фиг.2 - устройство аэродинамического экрана, на фиг.3 - устройство редукционного клапана.
Токоприемник содержит токосъемный узел 1 (фиг.1), установленный на полупантографе, состоящем из подвижных нижней 2 и верхней 3 рам. Полупантограф установлен на основании 4 с изоляторами 5 и снабжен системой подрессоривания в виде одного торсиона 6, параллельного оси шарнирного соединения нижней рамы 2 с основанием 4. Одним концом торсион 6 связан с основанием 4, а другим - с тросиком 8 через рычаг 7, жестко закрепленным на теле торсиона 6. Энергоемкость торсиона 6 при полной его закрутке достаточна для подъема подвижных частей токоприемника и прижатия токосъемного узла 1 заданным усилием к контактному проводу. Для управления подъемом и опусканием токоприемника полупантограф снабжен подъемно-опускающим механизмом, например, в виде пневмопривода 10 с возвратной пружиной 11 и редукционным клапаном 15. Пневмопривод 10 своей тягой 12 с продольным пазом на конце связан с рычагом 13 на нижней раме 2. Энергоемкость пружины 11 достаточна для преодоления усилия торсиона 6 заданной опускающей силой и удержания токоприемника в сложенном положении прижатым заданным усилием к эластичному упору 14. С целью снижения аэродинамической нагрузки на токоприемник нижняя 2 и верхняя 3 подвижные рамы выполнены в виде трубы круглого сечения и сопряжены в одной плоскости, а тросик 8 размещен внутри полых верхних рам 2 и 3, выходит из отверстия находящегося в верхней раме 3, близко расположенного к токосъемному узлу 1, и закреплен на штоке токосъемного узла 1, что обеспечивает токосъемному узлу 1 горизонтальность рабочей поверхности.
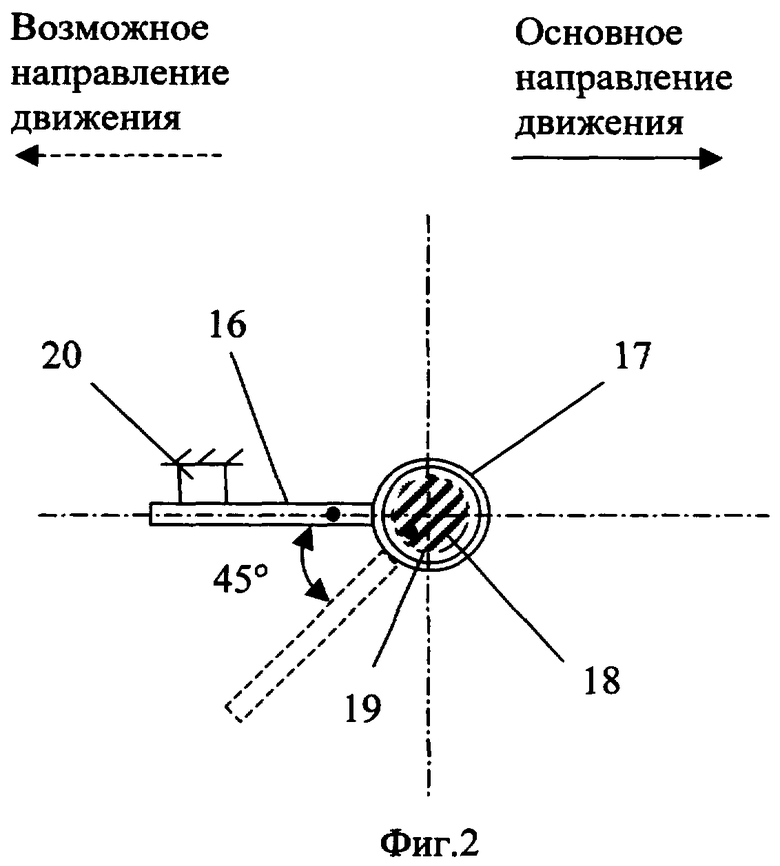
Для компенсации аэродинамических сил разной величины, возникающих в результате асимметричности конструкции токоприемника, при движениях токоприемника в противоположных направлениях токосъемный узел снабжен двумя аэродинамическими экранами (фиг.2). Каждый из экранов 16, приваренный к втулке 17, свободно вращающейся вокруг вертикальной оси 18, приваренной к каретке токосъемного узла 1, под действием спиральной пружины 19 принимает горизонтальное положение благодаря упору 20. При основном направлении движения токоприемника (вправо) экран 16 остается в горизонтальном положении и не влияет на вертикальную составляющую контактного усилия. При противоположном направлении движения (влево) под действием встречного воздушного потока на экран 16 действует аэродинамическая сила, пропорциональная скорости движения ЭПС. Экран 16, преодолевая сопротивление спиральной пружины 18, отклоняется на определенный угол, соответствующий данной скорости движения, благодаря чему создается вертикальная составляющая сила, направленная вниз, уменьшающая подъемную силу токоприемника.
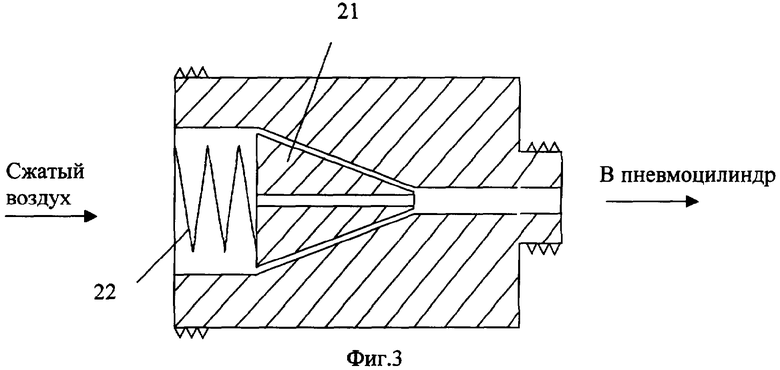
Для плавного подъема токоприемника пневмоцилиндр 10 снабжен редукционным клапаном (фиг.3). При подаче сжатого воздуха из пневмомагистрали в пневмоцилиндр 10 через редукционный клапан 15 скорость движения тяги 12, а значит, и время подъема токоприемника зависит от скорости заполнения цилиндра сжатым воздухом, что обуславливается отверстием малого диаметра в конусе 21. Опускание токоприемника происходит под действием силы тяжести самого токоприемника. При этом воздух из пневмоцилиндра 10 выходит через отверстие в конусе 21 и зазор между конусом 21 и корпусом редукционного клапана 15, образованный за счет жесткости пружины 22. Требуемую скорость опускания можно получить, имея набор пружин с разными жесткостями.
Токоприемник работает следующим образом. В сложенном положении токоприемник прижат к эластичному упору 14 силой пружины 11. Для подъема токоприемника в пневмопривод 10 через редукционный клапан 15 подают сжатый воздух. Под действием сжатого воздуха пружина 11 сжимается, а тяга 12 выдвигается со скоростью, зависящей от отверстия в клапане 15, и перестает удерживать полупантограф в сложенном состоянии, отчего он под действием закрученного торсиона 6 отрывается от упора 14 и, удерживаемый тягой 12, поднимается по мере выдвижения этой тяги. По мере подъема токоприемника рычаг 7 поворачивается и тянет тросик 8, который, в свою очередь, тянет за шток токосъемного узла и поворачивает его относительно верхней рамы 3, сохраняя при этом горизонтальность рабочей поверхности токосъемного узла 1. При встрече с контактным проводом токосъемный узел 1 упирается в него и под действием торсиона 6 нажимает на него заранее заданным усилием, а подъем полупантографа при этом прекращается. Тяга 12 продолжает выдвигаться на свою максимальную длину, определяемую внутренним упором в пневмоприводе 10 и удерживается в этом положении сжатым воздухом. При этом паз на конце тяги 12 отрывается от рычага 13 и не препятствует работе полупантографа на всем рабочем диапазоне высоты подъема токоприемника. Под действием усилия контактного нажатия токосъемный узел 1 прижимается к контактному проводу.
Для опускания токоприемника из пневмопривода 10 через редукционный клапан 15 выпускают сжатый воздух. При этом тяга 12 под действием пружины 11 втягивается в пневмопривод 10 со скоростью, зависящей от отверстия в клапане 15, захватывает на своем пути рычаг 13 и укладывает тем самым полупантограф в сложенное положение, удерживая его прижатым к упору 14 заданным усилием.
| название | год | авторы | номер документа |
|---|---|---|---|
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОЕЗДОВ | 2004 |
|
RU2272720C1 |
| ТОКОПРИЕМНИК РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2188136C2 |
| ТОКОПРИЁМНИК ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2800163C1 |
| ТОКОПРИЕМНИК РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА, ПРЕИМУЩЕСТВЕННО ТРАМВАЯ | 2005 |
|
RU2297340C1 |
| ТРАМВАЙНЫЙ ВАГОН С ПОНИЖЕННЫМ УРОВНЕМ ПОЛА | 2005 |
|
RU2302956C1 |
| Токоприемник для электропоезда | 2022 |
|
RU2778163C1 |
| Измерительный токоприемник электроподвижного состава | 2018 |
|
RU2681477C1 |
| ТОКОСЪЕМНОЕ УСТРОЙСТВО | 2001 |
|
RU2191708C2 |
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2009 |
|
RU2428327C1 |
| ТОКОПРИЕМНИК С АКТИВНЫМ РЕГУЛИРОВАНИЕМ ПОДВИЖНОЙ СИСТЕМЫ ДЛЯ ЭЛЕКТРОВОЗОВ | 2001 |
|
RU2201355C1 |
Изобретение относится к области железнодорожного транспорта и направлено на усовершенствование токоприемников электроподвижного состава. Токоприемник имеет токосъемный узел с подрессоренным полозом, установленный на полупантографе. Нижняя подвижная рама полупантографа шарнирно связана с изолированным основанием торсионной системой подрессоривания и подъемно-опускающим механизмом. Верхняя подвижная рама нижним концом шарнирно связана с нижней рамой и через тросик и рычаг с торсионом. Верхняя подвижная рама верхним концом связана шарнирно упругой связью с кареткой токосъемного узла. Система подрессоривания выполнена в виде торсиона, расположенного параллельно оси шарнирного соединения нижней рамы и связанного одним концом с основанием, а другим через жестко закрепленный на торсионе рычаг с тросиком, проходящим внутри нижней и верхней рам через ролики, установленные в местах сочленения рам, крепящимся к штоку токосъемного узла. Горизонтальность рабочей поверхности токосъемного узла при всех его высотах обеспечивается за счет упругого вращения токосъемного узла, обусловленного спиральной пружиной, вокруг его шарнирного крепления к верхней раме, а также силы тяги тросика, закрепленного на штоке токосъемного узла. Технический результат заключается в упрощении конструкции и повышении качества токосъема. 2 з.п. ф-лы, 3 ил.
1. Токоприемник электроподвижного состава, имеющий токосъемный узел с подрессоренным полозом, установленный на полупантографе, содержащем нижнюю подвижную раму, шарнирно связанную с изолированным основанием, торсионной системой подрессоривания и подъемно-опускающим механизмом, верхнюю подвижную раму, шарнирно связанную с нижней рамой и кареткой токосъемного узла на конце верхней рамы, отличающийся тем, что система подрессоривания выполнена в виде одного торсиона, параллельного оси шарнирного соединения нижней рамы с основанием и связанного одним концом с основанием, а другим через жестко закрепленный на торсионе рычаг - с тросиком, проходящим внутри нижней и верхней рам через ролики, установленные в местах сочленения рам, крепящимся к штоку токосъемного узла, имеющего упругое вращение вокруг его шарнирного крепления к верхней раме с помощью спиральной пружины для придания рабочей поверхности токосъемного узла горизонтального положения при всех высотах токоприемника.
2. Токоприемник по п.1, отличающийся тем, что токосъемный узел снабжен двумя аэродинамическими экранами, расположенными на каретке с автоматической компенсацией аэродинамической подъемной силы, возникающей при движении токоприемника коленом вперед.
3. Токоприемник по п.1, отличающийся тем, что на входе пневмопривода имеется редукционное устройство, обеспечивающее плавные подъем и опускание токоприемника.
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОЕЗДОВ | 2004 |
|
RU2272720C1 |
| ТОКОПРИЕМНИК ЭЛЕКТРОПОЕЗДА | 2003 |
|
RU2229987C1 |
| ИНСТРУМЕНТ ДЛЯ ПРЕССОВАНИЯ ТРУБ | 1998 |
|
RU2165813C2 |
| DE 10051677 А1, 02.05.2002. | |||

