Предлагаемая система относится к области радиоэлектроники, в частности ближней радиолокации, и может быть использована в системах предотвращения столкновений транспортных средств и контроля дорожного движения.
В последнее десятилетие наблюдается бурное развитие радиолокационных средств определения обстановки на автомобильных транспортных магистралях, основным достоинством которых является возможность предоставления водителям транспортных средств и сотрудникам органов, контролирующих дорожное движение, объективных данных о скоростях и координатах объектов на магистралях в любое время суток и в любых погодных условиях. В настоящее время в развитых странах подобными системами, работающими в миллиметровом диапазоне длин волн, оснащаются автобусы и грузовой транспорт, ожидается, что к 2005 году более 1 млн. систем будут установлены на легковые автомобили. Сдерживающим фактором широкого применения автомобильных радиолокаторов (радаров) является их относительно высокая стоимость (см. журнал “Microwave Journal”, 2001, vol. 44, #5, р.271).
Анализ патентной и научно-технической информации позволяет сделать вывод, что основной причиной высокой стоимости систем этого класса является сложность аналогового приемопередатчика радиолокатора, содержащего, как правило, большое количество дорогостоящих микроволновых узлов.
В большинстве известных технических решений для зондирования используют сигнал с линейной частотной модуляцией (или сочетание его с непрерывным немодулированным сигналом), а информацию о скорости и дальности объектов получают измерением мгновенной разности частот излучаемого и принятого сигнала.
Примером такого решения является радиолокатор и реализуемый им способ измерения параметров объектов, в котором относительно высокие технические параметры обеспечиваются применением сложной схемы формирования зондирующего сигнала в передатчике и двойного преобразования частоты в приемнике (см. Millimeter-Wave Radar Sensor for Automotive Intelligent Cruise Control (ICC), IEEE Transactions on Microwave Theory and Techniques, vol. 45, No 12, December 1997).
Другим примером является способ определения дальности в доплеровских измерителях вектора скорости для летательных аппаратов (см. патент РФ №2018864 от 10.07.92), в котором используется частотная модуляция зондирующего сигнала по ступенчато-пилообразному закону с заданной величиной скачка частоты на ступеньку и длительностью ступеньки с возможностью измерения фазы в ней. Дальность определяют по разности фаз частотно-модулированного излучаемого и отраженного сигнала на частоте модуляции. Недостатком известного способа измерения является низкая чувствительность, обусловленная тем фактом, что преобразованный принятый сигнал (сигнал промежуточных частот) лежит в области низких частот, где имеет место большой уровень фликкер-шума.
Общим недостатком метода радиолокации с линейно-частотной модуляцией (метода ЛЧМ) является, как известно, ограничение разрешающей способности и точности измерения дальности длительностью периода частотной модуляции, что обусловлено тем, что принятый сигнал анализируется во временной области.
Предпосылки к альтернативному способу радиолокации, использующему обработку сигнала в частотной области (спектральный подход), отражены в монографии (см. Мухаммед Абд Аль-Вахиб Исмаил. Радиолокационный высотомер с двойной частотной модуляцией. Изд. Иностранной литературы, М., 1957, (пер. с англ.) или Mohamed Abd-El Wahab Ismael, A Study of the Double Modulated F.M. Radar, Verlag Leeman, Zurich, 1955). Некоторые результаты, изложенные в разделе 2 первой главы монографии, в частности, полученное автором выражение (29) для спектра выходного сигнала смесителя, перемножающего излучаемый и принятый частотно-модулированные по гармоническому закону сигналы, являются отдаленным аналогом предлагаемого способа радиолокации. Автором монографии, однако, при выводе формулы (29) сделаны упрощения, скрывшие некоторые особенности спектра, в частности зависимость фаз гармоник модулирующего сигнала от расстояния до отражающего объекта.
Близким к изобретению является способ измерения параметров объектов, реализуемый гомодинным радиолокатором непрерывного излучения с частотной модуляцией, в котором модулируемый по частоте генератор СВЧ-колебаний служит одновременно генератором передатчика и гетеродином приемника, с последующей обработкой сигнала смесителя.
Способом-прототипом предлагаемого изобретения является способ радиолокационного измерения скорости и координат объектов, включающий излучение периодически модулированного по частоте зондирующего сигнала, прием отраженных от объектов сигналов, перемножение излучаемого и принятых сигналов, усиление в заданной полосе частот полученного в результате перемножения гомодинного сигнала и анализ полученного сигнала промежуточных частот. Расстояние до объекта вычисляют по измеренной амплитуде гармоники спектра выходного (гомодинного) сигнала смесителя, а скорость - по доплеровской частоте изменения этой амплитуды (см. “Справочник по радиолокации”, в четырех томах под редакцией М. Сколника (далее “Справочник”), том 3, М.: Советское радио, 1976-1979 (пер. с английского “RADAR HANDBOOK”, Editor-In-Chief M.I.Skolnik, McGRAU-HILL BOOK COMPANY, 1970)”, том 3, 1979, стр. 258-262). Недостатками известного способа является низкая предельная дальность, обусловленная неоптимальностью приема отраженных сигналов, большая погрешность измерения дальности объектов, обусловленная сильной зависимостью амплитуды гармоник от дестабилизирующих факторов, а также отсутствие возможности определения знака радиальной скорости.
По наибольшему количеству существенных признаков системой-прототипом предлагаемого изобретения является автомобильная радарная система (см. патент США №5325097 от 28 июня 1994, “Multimode Radar for Road Vehicle Blind-zone Target Discrimination”). Известная система для радиолокационного измерения скоростей и координат объектов содержит соединенные микроволновыми входами и выходами антенно-фидерное устройство, обеспечивающее излучение зондирующего и прием отраженных от измеряемых объектов сигналов, и приемопередающее устройство, обеспечивающее формирование зондирующего сигнала, перемножение с ним принятых сигналов и усиление промежуточных частот полученного гомодинного сигнала, а также аналого-цифровой преобразователь и процессор, вход управления частотой зондирующего сигнала и выходы промежуточной частоты приемопередающего устройства соединены соответственно с аналоговым выходом процессора и входами аналого-цифрового преобразователя, а процессор наделен программами управления частотой приемопередающего устройства и вычисления скоростей и координат объектов. Приемопередающее устройство включает генератор зондирующего сигнала, вход управления частотой которого соединен через модулятор с цифровым процессором, смеситель, первый вход которого соединен с выходом генератора зондирующего сигнала, второй вход подключен к входу приемопередающего устройства, а выход через полосовой усилитель соединен с выходом приемопередающего устройства. Антенно-фидерное устройство выполнено в виде передающей и приемной антенн.
Способ, реализуемый системой-прототипом определения параметров транспортного средства, использует линейно-частотно-модулированный сигнал с линейно растущей и линейно уменьшающейся частотой, а также режим с постоянной частотой излучаемого сигнала. Излучаемый и принятый сигналы перемножают, выделяют сигнал промежуточных частот, который преобразуют в цифровую форму и анализируют во временной области с помощью цифрового процессора с учетом собственной скорости транспортного средства.
Недостатком системы-прототипа является недостаточная предельная дальность и точность измерений, обусловленная описанными выше особенностями метода ЛЧМ, а также сильным влиянием фликкер-шума.
Для устранения вышеуказанных недостатков была поставлена задача создания способа и системы для радиолокационного измерения скорости и координат объектов, обеспечивающих при минимальной стоимости достаточную для целей безопасности дорожного движения предельную дальность, разрешающую способность и точность измерения скоростей и координат объектов.
Указанный технический результат достигается тем, что в способе радиолокационного измерения скоростей и координат объектов, включающем излучение периодически модулированного по частоте зондирующего сигнала, прием отраженных от объектов сигналов, перемножение излучаемого и принятых сигналов, усиление в заданной полосе частот полученного в результате перемножения гомодинного сигнала и анализ полученного сигнала промежуточных частот, согласно изобретению формируют основное и квадратурное частотные множества опорных сигналов, каждый из которых содержит одну из гармоник модулирующего сигнала, вычисляют основное и квадратурное частотные множества функций корреляции опорных сигналов и сигнала промежуточных частот, из которых вычисляют множество функций амплитуд гармоник сигнала промежуточных частот, из полученных функций амплитуд, по крайней мере, двух - четной и нечетной - гармоник выделяют доплеровские сигналы обнаруженных объектов, вычисляют основные и квадратурные множества коэффициентов корреляции одного из выделенных доплеровских сигналов и функций корреляции и определяют модули радиальной скорости объектов по частоте выделенных доплеровских сигналов, знаки радиальной скорости - по знаку разности фаз доплеровских сигналов, выделенных из четной и нечетной гармоник, а по отношениям постоянных составляющих квадратурных и основных функций корреляции для неподвижных объектов или по отношениям квадратурных и основных коэффициентов корреляции для движущихся объектов определяют фазочастотную характеристику сигнала промежуточных частот и вычисляют дальность до основного объекта по крутизне линейной составляющей, а разности дальностей основного и других отражающих объектов - по периодам периодических составляющих фазочастотной характеристики.
Во втором варианте способа радиолокационного измерения скоростей и координат объектов согласно изобретению формируют нечетное и четное временные множества опорных сигналов, соответствующие множеству средних значений измеряемых дальностей, каждый из которых содержит соответственно только нечетные или только четные гармоники модулирующего сигнала, вычисляют множества нечетных и четных функций корреляции опорных сигналов и сигнала промежуточных частот, выделяют из функций корреляции нечетные и четные постоянные составляющие и доплеровские сигналы, по которым вычисляют первый и второй полные доплеровские сигналы обнаруженных объектов путем суммирования и вычитания нечетного и четного выделенных доплеровских сигналов, причем фазу одного из них предварительно изменяют на π /2, и определяют модули радиальной скорости объектов по частотам полных доплеровских сигналов, знаки радиальной скорости - по величине отношений уровней первого и второго полных доплеровских сигналов, а по уровням нечетной или четной постоянных составляющих функций корреляции для неподвижных объектов или по амплитуде полных доплеровских сигналов для движущихся объектов определяют номер опорного сигнала в множествах и соответственно дальность до неподвижных или движущихся объектов.
В третьем варианте способа радиолокационного измерения скоростей и координат объектов согласно изобретению формируют нечетное и четное временные множества опорных сигналов, соответствующих множеству значений измеряемых дальностей, каждый из которых содержит соответственно только нечетные или только четные гармоники модулирующего сигнала, а также основное и квадратурное частотные множества опорных сигналов, каждый из которых содержит одну из гармоник модулирующего сигнала, вычисляют временные нечетное и четное множества функций корреляции опорных сигналов и сигнала промежуточных частот, а также основное и квадратурное частотные множества функций корреляции опорных сигналов и сигнала промежуточных частот, выделяют из функций корреляции временных множеств нечетные и четные доплеровские сигналы, по которым вычисляют первый и второй полные доплеровские сигналы обнаруженных объектов путем суммирования и вычитания нечетного и четного выделенных доплеровских сигналов, причем фазу одного из них предварительно изменяют на π /2, после чего вычисляют основное и квадратурное частотные множества коэффициентов корреляции полных доплеровских сигналов и функций корреляции основного и квадратурного частотных множеств и определяют модули радиальной скорости обнаруженных объектов по частотам полных доплеровских сигналов, знаки радиальной скорости - по величине отношения уровней первого и второго полных доплеровских сигналов, а по отношениям квадратурных и основных коэффициентов корреляции определяют фазочастотную характеристику сигнала промежуточных частот и вычисляют дальность до основного объекта по крутизне линейной составляющей, а разности дальностей основного и других отражающих объектов - по периодам периодических составляющих фазочастотной характеристики.
В четвертом варианте способа радиолокационного измерения скоростей и координат объектов согласно изобретению прием отраженного сигнала, его перемножение с излучаемым сигналом и усиление в заданной полосе частот осуществляют, по крайней мере, еще в одной позиции, пространственно разнесенной от первой, при этом формируют нечетное и четное временные множества опорных сигналов, соответствующие множеству значений измеряемых дальностей, каждый из которых содержит соответственно только нечетные или только четные гармоники модулирующего сигнала, вычисляют для каждой позиции временные множества нечетных и четных функций корреляции опорных сигналов и сигнала промежуточных частот, выделяют из функций корреляции нечетные и четные постоянные составляющие и доплеровские сигналы, по которым вычисляют в каждой позиции первый и второй полные доплеровские сигналы путем суммирования и вычитания нечетного и четного выделенных доплеровских сигналов, причем фазу одного из них предварительно изменяют на π /2, после чего вычисляют суммарные по всем позициям полные доплеровские сигналы для каждого обнаруженного объекта, при этом ступенчато изменяют фазу полных доплеровских сигналов обнаруженных объектов на заданную для каждой позиции величину фазовой коррекции до достижения максимальных амплитуд суммарных полных доплеровских сигналов обнаруженных объектов, по частотам суммарных полных доплеровских сигналов определяют модули радиальной скорости объектов, по отношениям амплитуд первого и второго суммарных полных доплеровских сигналов определяют знаки радиальной скорости, а по уровням нечетной или четной постоянных составляющих функций корреляции для каждого неподвижного объекта или по амплитуде полных доплеровских сигналов для каждого движущегося объекта определяют номер опорного сигнала в множествах и соответственно дальность до неподвижных или движущихся объектов. Дополнительно по величинам фазовой коррекции, соответствующим максимумам амплитуды суммарных полных доплеровских сигналов обнаруженных объектов, и известному расстоянию между позициями определяют угловые координаты каждого обнаруженного объекта. Кроме того, дополнительно в каждой позиции вычисляют отношения амплитуд нечетных и четных выделенных доплеровских сигналов обнаруженных объектов, по которым определяют разности фаз принятых в разных позициях отраженных сигналов, и по полученным значениям и известным расстояниям между позициями определяют угловые координаты каждого объекта.
В пятом варианте способа радиолокационного измерения скоростей и координат объектов согласно изобретению прием отраженного сигнала, его перемножение с излучаемым сигналом и усиление в заданной полосе частот осуществляют, по крайней мере, еще в одной позиции, пространственно разнесенной от первой, при этом формируют нечетное и четное временные множества опорных сигналов, соответствующих множеству значений измеряемых дальностей, каждый из которых содержит соответственно только нечетные или только четные гармоники модулирующего сигнала, а также основное и квадратурное частотные множества опорных сигналов, каждый из которых содержит одну из гармоник модулирующего сигнала, вычисляют для каждой позиции временные множества нечетных и четных функций корреляции опорных сигналов и сигнала промежуточных частот, а также основное и квадратурное частотные множества функций корреляции опорных сигналов и сигнала промежуточных частот, выделяют из функций корреляции временных множеств нечетные и четные доплеровские сигналы, по которым вычисляют первый и второй полные доплеровские сигналы путем суммирования и вычитания нечетного и четного выделенных доплеровских сигналов, причем фазу одного из них предварительно изменяют на π /2, после чего вычисляют суммарные по всем позициям полные доплеровские сигналы для каждого обнаруженного объекта, при этом ступенчато изменяют фазу полных доплеровских сигналов обнаруженных объектов на заданную для каждой позиции величину фазовой коррекции до достижения максимальных амплитуд суммарных полных доплеровских сигналов обнаруженных объектов, вычисляют суммарные по позициям функции корреляции основного и квадратурного частотных множеств, при этом задерживают функции корреляции на время, определяемое величиной фазовой коррекции, соответствующей максимуму амплитуды суммарного полного доплеровского сигнала обнаруженного объекта, после чего в каждой позиции вычисляют основное и квадратурное частотные множества коэффициентов корреляции каждого из суммарных полных доплеровских сигналов и суммарных функций корреляции основного и квадратурного частотных множеств, и определяют модули радиальной скорости объектов по частотам суммарных полных доплеровских сигналов, знаки радиальной скорости - по величине отношения амплитуд первого и второго суммарных полных доплеровских сигналов, а по отношениям квадратурных и основных коэффициентов корреляции для каждой гармоники частоты модуляции определяют фазочастотную характеристику сигнала промежуточных частот и вычисляют дальность до основного объекта по крутизне линейной составляющей, а разности дальностей основного и других отражающих объектов - по периодам периодических составляющих фазочастотной характеристики. Дополнительно по величинам фазовой коррекции, соответствующим максимумам амплитуды суммарных полных доплеровских сигналов обнаруженных объектов, и известному расстоянию между позициями определяют угловые координаты каждого обнаруженного объекта. Кроме того, дополнительно в каждой позиции вычисляют отношения амплитуд нечетных и четных выделенных доплеровских сигналов обнаруженных объектов, по которым определяют разности фаз принятых в разных позициях отраженных сигналов, и по полученным значениям и известным расстояниям между позициями определяют угловые координаты каждого объекта.
Указанный технический результат достигается также тем, что в систему для радиолокационного измерения скоростей и координат объектов, содержащую соединенные микроволновыми входами и выходами антенно-фидерное устройство, обеспечивающее излучение зондирующего и прием отраженных от измеряемых объектов сигналов, и приемопередающее устройство, обеспечивающее формирование зондирующего сигнала, перемножение с ним принятых сигналов и усиление промежуточных частот полученного гомодинного сигнала, а также аналого-цифровой преобразователь и процессор, вход управления частотой зондирующего сигнала и выходы промежуточной частоты приемопередающего устройства соединены соответственно с аналоговым выходом процессора и входами аналого-цифрового преобразователя, а процессор наделен программами управления частотой приемопередающего устройства и вычисления скоростей и координат объектов, согласно изобретению введен коррелометр, соединенный шиной данных с аналого-цифровым преобразователем и процессором, причем коррелометр наделен программами формирования опорных сигналов, состоящих из гармоник модулирующего сигнала, вычисления функций корреляции сигнала промежуточных частот и опорных сигналов, а также вычисления из них вторичных функций, по параметрам которых определяются скорости и координаты отражающих объектов.
В первом варианте системы согласно изобретению приемопередающее устройство содержит генератор зондирующего сигнала, выход которого подключен к микроволновому выходу приемопередающего устройства, а вход управления частотой является входом управления частотой приемопередающего устройства, смеситель, первый вход которого соединен с микроволновым входом приемопередающего устройства, второй вход соединен с выходом генератора зондирующего сигнала, а выход гомодинного сигнала подключен через полосовой усилитель к выходу промежуточных частот приемопередающего устройства. Антенно-фидерное устройство может либо содержать циркулятор, первое и второе плечи которого являются входом и выходом антенно-фидерного устройства, а третье плечо подключено к приемопередающей антенне, либо выполняться в виде приемной и передающей антенн, подключенных соответственно к его выходу и входу устройства. Смеситель приемопередающего устройства этого варианта может быть выполнен по диодной балансной схеме и иметь выходы сигналов суммы и разности напряжений на диодах, при этом выход сигнала разности является выходом гомодинного сигнала, а приемопередающее устройство может дополнительно содержать управляемые фазовращатель и аттенюатор, включенные последовательно между микроволновыми выходом и входом устройства, а также схему управления компенсацией помехи, выходы которой подключены к входам управления фазовращателя и аттенюатора, а входы соединены с выходами сигналов разности и суммы балансного смесителя.
Во втором варианте системы согласно изобретению приемопередающее устройство выполнено в виде автодинного узла, выход-вход и вход управления частотой которого являются соответственно микроволновым выходом-входом и входом управления частотой приемопередающего устройства, выход гомодинного сигнала автодинного узла через полосовой усилитель подключен к выходу промежуточных частот приемопередающего устройства, а антенно-фидерное устройство выполнено в виде приемопередающей антенны.
В третьем варианте системы согласно изобретению приемопередающее устройство содержит генератор зондирующего сигнала, вход управления частотой которого является входом управления частотой приемопередающего устройства, проходной смеситель, первый вход которого подключен к выходу генератора, а выход-вход соединен с микроволновым выходом-входом приемопередающего устройства, выход гомодинного сигнала проходного смесителя подключен через полосовой усилитель к выходу промежуточных частот приемопередающего устройства, а антенно-фидерное устройство выполнено в виде приемопередающей антенны.
В любом их первых трех вариантов системы согласно изобретению коррелометр может иметь аналоговый выход, соединенный через дополнительный вход приемопередающего устройства с входом полосового усилителя, причем коррелометр дополнительно наделен программами измерения фазочастотной характеристики полосового усилителя и коррекции фаз гармоник в опорных сигналах.
В четвертом варианте системы согласно изобретению приемопередающее устройство содержит генератор зондирующего сигнала, выход которого подключен к микроволновому выходу приемопередающего устройства, а вход управления частотой является соответственно входом управления частотой приемопередающего устройства, по крайней мере два смесителя, первые входы которых соединены с микроволновыми входами приемопередающего устройства, вторые входы соединены с выходом генератора зондирующего сигнала, а выходы подключены через полосовые усилители к выходам промежуточных частот приемопередающего устройства. Антенно-фидерное устройство может либо содержать циркулятор, первое и второе плечи которого являются входом и первым выходом антенно-фидерного устройства, а третье плечо подключено к приемопередающей антенне, и, по крайней мере, еще одну приемную антенну, выходы приемных антенн подключены соответственно к другим выходам антенно-фидерного устройства, либо может быть выполнено в виде передающей антенны, подключенной к микроволновому входу антенно-фидерного устройства, и нескольких приемных антенн, выходы которых подключены соответственно к микроволновым выходам антенно-фидерного устройства.
В пятом варианте системы согласно изобретению приемопередающее устройство содержит генератор зондирующего сигнала, вход управления частотой которого является входом управления частотой приемопередающего устройства, проходной смеситель, первый вход которого подключен к выходу генератора, а вход-выход соединен с микроволновым входом-выходом приемопередающего устройства, по крайней мере еще один смеситель, первые входы смесителей соединены с микроволновыми входами приемопередающего устройства, а вторые входы соединены с выходом генератора зондирующего сигнала, выходы гомодинного сигнала каждого из смесителей подключены через полосовые усилители к выходам промежуточных частот приемопередающего устройства, а антенно-фидерное устройство содержит приемопередающую антенну, подключенную к его выходу-входу, и, по крайней мере, еще одну приемную антенну, подключенную к его выходу.
Сущность предложенного изобретения заключается в том, что для обработки гомодинного сигнала, полученного перемножением непрерывного частотно-модулированного зондирующего излучаемого сигнала с принятыми сигналами, отраженными от измеряемых объектов, используются корреляционные методы.
Передающей антенной в сторону измеряемого объекта или объектов излучается формируемый генератором зондирующий сигнал (далее - излучаемый сигнал), который в общем случае имеет вид:

Принятый отраженный от объекта сигнал на выходе приемной антенны имеет вид:

где Е0 - ЭДС зондирующего сигнала на клеммах передающей антенны, ω =2π f - частота излучаемого сигнала, ω 0=2π f0=2π c/λ 0 - круговая частота центрального колебания излучаемого сигнала, λ 0 - его длина волны, ϕ M(t) - составляющая фазы излучаемого сигнала, обусловленная частотной модуляцией генератора, τ =2L/с - время задержки принятого отраженного сигнала относительно излучаемого, γ - коэффициент ослабления сигнала на трассе "передающая антенна - объект - приемная антенна", L - дальность (расстояние между объектом и радиолокатором), с - скорость распространения электромагнитного сигнала в среде.
Излучаемый и принятый отраженный сигналы поступают на входы смесителя, выполняющего их перемножение. Если поступающая на смеситель мощность излучаемого сигнала много больше мощности принятого отраженного сигнала, то амплитуда низкочастотной (разностной) составляющей выходного сигнала смесителя пропорциональна амплитуде принятого отраженного сигнала, а фаза равна разности фаз излучаемого и принятого отраженного сигналов:

где α см - коэффициент передачи смесителя, Δ ϕ M(t, τ ) - составляющая разности фаз, обусловленная соответственно модуляцией частоты излучаемого сигнала.
В тригонометрической форме действительная часть выражения (3) - низкочастотная составляющая результата перемножения принятого и излучаемого сигналов, далее - гомодинный сигнал, приобретает вид:

где U
Первое слагаемое в квадратных скобках - произведение постоянной величины (центральной частоты излучаемого сигнала) на постоянное или медленно меняющееся (по сравнению с сигналом модуляции) время задержки принятого сигнала говорит о наличии в гомодинном сигнале постоянной составляющей, зависящей от времени задержки (τ ) или сигнала доплеровской частоты. Второе слагаемое ответственно за появление в гомодинном сигнале периодической составляющей, являющейся следствием частотной модуляции. Нижеследующий анализ проведен для случая, когда модулирующий сигнал есть гармоническая функция времени, хотя возможно применение для этой цели иных периодических функций. Если зависимость частоты генератора от напряжения управления линейна, то мгновенное значение частоты излучаемого сигнала определяется выражением f=f0+Δ fM=f0+Δ f0sinΩ t. При этом второе слагаемое выражения (4) определится, как


где ψ =2ψ 0sinФ, ψ 0=Δ f0/F - индекс частотной модуляции зондирующего сигнала, Ф=Ω τ /2, Δ f0 - девиация частоты, Ω =2π F - круговая частота модуляции.
Обозначив разность фаз центральных спектральных составляющих излучаемого и принятого сигналов как Δ ϕ =ω0τ=2ω 0L c, получим:
 или:
или:

Согласно теории функций Бесселя (см. А.А. Харкевич. Спектры и анализ. М.: ГИФМЛ, 1962, стр. 39) справедливо:


С учетом этих соотношений и обозначения Ф(N) - фаза гармоники кратности N (при одном отражающем объекте Ф(N)=NФ) получаем выражение для спектра гомодинного сигнала:

Здесь J(N)(J(2n-1), J(2n)) - функции Бесселя первого рода порядка N ((N=2n-1) или (N=2n)) аргумента ψ , Ф=Ω τ 2=2π FLc=2π LΛ - разность фаз модулирующего сигнала и сигнала первой гармоники в гомодинном сигнале смесителя (в сигнале ПЧ), Λ =cF - длина волны модулирующего сигнала, n - целое положительное число, определяющее номер гармоники N модулирующего сигнала. Если k-тый объект движется, например, с постоянной радиальной скоростью Vk, тогда время задержки отраженного сигнала τ k изменяется во времени:

а разность фаз излучаемого и принятого сигналов этого объекта Δ ϕ k определится как:

Здесь k - номер обнаруженного объекта, L - соответствующая начальная разность фаз, (-1)mVk - радиальная скорость объекта, которая может быть положительной величиной (объект удаляется, m=0) или отрицательной (объект приближается, m=1), a 2Vkλ 0=F
- соответствующая начальная разность фаз, (-1)mVk - радиальная скорость объекта, которая может быть положительной величиной (объект удаляется, m=0) или отрицательной (объект приближается, m=1), a 2Vkλ 0=F
После усиления заданных спектральных составляющих гомодинного сигнала и подстановки (9) в (7) получаем выражение спектра сигнала промежуточных частот (ПЧ) с ограниченным числом гармоник для случая одиночного объекта:
Здесь K(Ω ) - частотная характеристика коэффициента усиления, причем К(0)=0, nmin и nmax - числа, определяющие номера низшей (Nmin) и высшей (Nmax) заданных гармоник в полосе усиления, то есть в спектре сигнала ПЧ. При наличии сигнала от одного отражающего объекта зависимость фазы гармоники от частоты, то есть фазочастотная характеристика сигнала ПЧ линейна: (ФN=NФ). Для общего случая, когда имеют место сигналы от нескольких (kmax) движущихся и неподвижных объектов, получаем из (10):

Очевидно, что спектр сигнала ПЧ (10-11), как и спектр гомодинного сигнала (7), содержит множество дискретных спектральных составляющих - гармоник модулирующего сигнала (далее - гармоники). Амплитуда гармоник (10, 11) изменяется с доплеровской частотой по закону амплитудно-модулированного сигнала с подавленной несущей, причем фаза доплеровского колебания определяется начальной разностью фаз Δ ϕ
Амплитуда четных гармоник определяется косинусом разности фаз центральных колебаний принятого и излучаемого сигнала, а амплитуда нечетных - синусом. Эта особенность спектра позволяет вычислить главное значение Δ ϕ
Сущность предлагаемого способа радиолокационного измерения скоростей и координат объектов состоит в том, что к гомодинному сигналу применяют методы корреляционного анализа путем перемножения его с опорными сигналами и интегрирования (усреднения) результата (см. например, Теоретические основы радиолокации. Под ред. В.Е. Дулевича. М.: Советское радио, стр. 71-73). Из параметров полученных при этом функций корреляции вычисляются скорости, дальности и в вариантах изобретения угловые координаты отражающих объектов. Реально определяются функции корреляции сигнала промежуточных частот (ПЧ), который представляет собой усиленную часть спектра гомодинного сигнала, существенно важную для целей измерения, и специально сформированных опорных сигналов. При этом для обработки сигнала ПЧ используются следующие варианты (алгоритмы) способа.
Первый вариант способа. Определение функций корреляции сигнала ПЧ с опорными сигналами одного или двух частотных множеств, каждый из которых (сигналов) имитирует дельта-функцию в частотной области, являясь гармоникой модулирующего сигнала. Применяется в случаях, когда наблюдается небольшое количество объектов. Позволяет осуществлять селекцию объектов по скорости.
Второй вариант способа. Определение функций корреляции сигнала ПЧ с опорными сигналами временных множеств, каждый из которых имитирует временную функцию ожидаемого гомодинного сигнала, являясь соответствующим набором гармоник модулирующего сигнала. Применяется в случаях, когда наблюдается большое количество преимущественно неподвижных объектов. Позволяет осуществлять селекцию объектов по дальности и скорости, но требует при этом проведения большого объема вычислений.
Третий вариант способа. Сочетание первого и второго вариантов. Применяется в случаях наблюдения большого количества движущихся объектов на предельных дальностях. Позволяет осуществлять селекцию объектов по скорости и измерение дальности при минимальном объеме вычислений.
Четвертый и пятый варианты способа применяются в случаях, когда чувствительности одной позиции недостаточно для достижения заданной предельной дальности или необходимо определение угловых координат объектов. Четвертый вариант способа состоит в применении второго варианта способа (алгоритма обработки) к сигналам ПЧ, полученным из отраженных сигналов, принятых в нескольких пространственно разнесенных позициях, использует суммирование и сравнение функций корреляции и вторичных функций, вычисленных из функций корреляции.
Пятый вариант способа состоит в применении третьего варианта способа (алгоритма обработки) к сигналам ПЧ, полученным из отраженных сигналов, принятых в нескольких пространственно разнесенных позициях, использует суммирование и сравнение функций корреляции и вторичных функций, вычисленных из функций корреляции.
В рамках настоящего изобретения допустимы и иные принципы формирования опорных сигналов при сохранении общего признака: каждый опорный сигнал может содержать либо только нечетные, либо только четные гармоники модулирующего сигнала. Спектры и, следовательно, временные функции опорных сигналов могут выбираться, например, по желаемой форме (зависимости от времени задержки) функции корреляции. В процессе измерения по любому алгоритму могут изменяться по заданной программе частота модулирующего сигнала F и девиация частотной модуляции Δ f0. Поскольку период гомодинного сигнала, как и сигнала ПЧ, равен периоду модулирующего сигнала, то для повышения отношения сигнал/шум может быть применен известный в импульсной радиолокации принцип накопления (интегрирования) (см. “Справочник”, том 1, стр. 41). В данном изобретении положительный эффект усиливается применением следующего алгоритма череспериодного суммирования, то есть получения накопленного в серии периодов сигнала промежуточных частот:
Здесь t=M(+)T+t*, 0≤ t*≤ T - время, отсчитываемое от начала периода, Т=1 F - период модулирующего сигнала, М(+) - номер периода в серии, состоящей из М(+)max периодов. Увеличение отношения сигнал/шум составляет 10M(+)max дБ. Череспериодное суммирование может сочетаться с череспериодным вычитанием, когда накопленный в одной серии сигнал вычитается из сигнала, накопленного в предыдущей серии. В этом случае подавляются сигналы, отраженные от неподвижных объектов и накапливаются сигналы движущихся объектов с определенными доплеровскими частотами. Обработка накопленных сигналов ПЧ проводится по приведенным далее вариантам способа (алгоритмам обработки) сигналов ПЧ.
При реализации первого варианта способа формируют основное (12-13) и квадратурное (14-15) частотные множества опорных сигналов, каждый из которых содержит одну из гармоник модулирующего сигнала вида (соответственно для нечетных и четных гармоник):




и перемножают их отдельно с сигналом промежуточных частот (10). Фазы основного и квадратурного опорных сигналов отличаются на π 2. Усреднением по времени результатов перемножения получают для каждого отражающего объекта соответственно два множества (основное и квадратурное) функций корреляции:




где G=K(Ω )U
Выражения (16-19) представляют функции корреляции в виде доплеровского спектра. При наличии нескольких отражающих объектов в силу принципа суперпозиции результирующая функция корреляции равна сумме их функций корреляции. Каждая из функций корреляции, таким образом, может содержать постоянную составляющую и спектр доплеровских сигналов с разными частотами, порожденные объектами, движущимися с разными скоростями.
Примечание. Далее определения опорных сигналов (нечетный, четный, частотный, временной) переносятся на соответствующие функции корреляции и вторичные функции, вычисленные из функций корреляции.
Из множеств функций корреляции (16-19) могут быть вычислены частотные множества функций амплитуд гармоник спектра ПЧ (далее функции амплитуд гармоник):
и функций фаз гармоник спектра ПЧ (далее функции фаз гармоник):

Частота спектральных составляющих функций корреляции (16-19) и функций амплитуд гармоник (20-21) равна доплеровской, то есть ее измерение позволяет измерить скорость объекта. Методами фильтрации сигнал постоянной составляющей или доплеровской частоты (далее - доплеровский сигнал) может быть выделен, то есть отражающий объект обнаружен, при этом существует возможность селекции объектов по скорости. Анализ спектра функций корреляции или амплитуд гармоник в полном диапазоне доплеровских частот позволяет проводить таким образом обнаружение сигналов отражающих объектов. Разность фаз доплеровских сигналов функций (16) и (17), (18) и (19), (20) и (21) равна ±π /2 и положительна, если объект удаляется. Фаза доплеровских сигналов функций (16), (18) и (20) изменяется на π при изменении направления движения объекта, при этом фаза доплеровских сигналов функций (17), (19) и (21) не изменяется. Это свойство может быть использовано для определения знака доплеровского сдвига частоты, то есть направления движения объекта путем определения знака разности фаз доплеровских сигналов, содержащихся в функциях амплитуд четной и нечетной гармоник. Для этого достаточно, например, выделить доплеровский сигнал любой из частот из функций (20, 21), изменить его фазу (20) на π /2 и получить сигнал  , умножить его на доплеровский сигнал, выделенный из (21) и вычислить постоянную составляющую результата перемножения. Если, например, Ф(N)=Ф
, умножить его на доплеровский сигнал, выделенный из (21) и вычислить постоянную составляющую результата перемножения. Если, например, Ф(N)=Ф

Таким образом, величина А(±) положительна для удаляющихся объектов и отрицательна для приближающихся.
Из выражений (10) и (11) следует, что фаза каждой гармоники спектра сигнала ПЧ несет информацию о дальности объекта, поскольку Ф=Ω τ /2=2π FL/c=2π L/Λ . Как следует из теорем о спектрах (см. А.А. Харкевич. Спектры и анализ. М.: ГИФМЛ, 1962, стр. 26), зависимость фазы гармоники частоты модуляции в сигнале ПЧ от частоты (то есть номера гармоники) определяется зависимостью разности фаз излучаемого и принятого сигналов от центральной частоты излучаемого сигнала. Иными словами измерение фазочастотной характеристики (ФЧХ) гармоник сигнала ПЧ (далее фазочастотной характеристики гармоник) позволяет определить фазочастотную характеристику принятого сигнала, по линейной составляющей которой вычисляется дальность основного (наиболее яркого) объекта, а по периоду периодической составляющей - разности дальностей основного и остальных отражающих объектов (см. Патент РФ №2158937, МКИ G 01 S 13/40, 13/08, выдан 10 ноября 2000). Фазочастотную характеристику гармоник вычисляют из множества фаз гармоники (22) по формуле:

где Δ Ф

Перемножение функций корреляции множеств (16-19) с выделенным сигналом (26) и усреднение результата по времени (то есть вычисление их коэффициентов корреляции) позволяет выявить основную и квадратурную составляющие амплитуд сигнала выделенной доплеровской частоты в функциях корреляции множества:




и вычисляя их отношения, определить фазу каждой гармоники  и фазочастотную характеристику гармоник (24), а следовательно, и дальность объекта (или объектов), ответственного за появление доплеровского сигнала выделенной частоты. Применение этого алгоритма позволяет определить разность дальностей объектов, движущихся с равными скоростями.
и фазочастотную характеристику гармоник (24), а следовательно, и дальность объекта (или объектов), ответственного за появление доплеровского сигнала выделенной частоты. Применение этого алгоритма позволяет определить разность дальностей объектов, движущихся с равными скоростями.
Таким образом для определения скоростей и дальностей объектов по первому алгоритму формируют множества (12-13), (14-15) опорных сигналов - гармоник модулирующего сигнала, перемножают каждый опорный сигнал с сигналом ПЧ (10, 11) и получают множества основных и квадратурных функций корреляции (16-19), а из них вычисляют функции амплитуд гармоник. Обнаружение объекта проводят по наличию постоянной составляющей или доплеровского сигнала в функциях корреляции или функциях амплитуд гармоник. Из постоянных составляющих функций корреляции определяют фазы гармоник (фазочастотную характеристику гармоник), обусловленные неподвижными объектами и вычисляют их дальности. Модули радиальной скорости движущихся объектов определяют по частоте доплеровского сигнала, выделенного из функции амплитуд гармоник, а их знаки - по знакам разности фаз доплеровских сигналов, выделенных из функций амплитуд нечетных и четных гармоник спектра ПЧ. Перемножением выделенного сигнала доплеровской частоты с множеством функций корреляции (16-19) определяют основные и квадратурные коэффициенты корреляции, а из них фазы гармоник, то есть фазочастотную характеристику гармоник, из которой вычисляют дальности движущихся объектов.
Для реализации второго варианта способа разобьем измеряемые дальности Lmin-Lmax на Р интервалов, обозначим множество средних значений интервалов, то есть измеряемых дальностей Lp, а множество средних значений ожидаемого времени задержки отраженного сигнала - τ р=2Lpc, и сформируем соответствующие им нечетное и четное временные множества опорных сигналов, соответствующих ожидаемым сигналам ПЧ. Индексом р обозначен номер элемента каждого из множеств. Как следует из (10), спектры опорных сигналов нечетного и четного множеств (ожидаемых сигналов ПЧ нечетных и четных гармоник) должны определяться при U




где 
По общему правилу оптимальной обработки (согласованной фильтрации) принятого сигнала (см. “Справочник”, том 3, стр. 400-402) для определения дальности необходимо найти номер множеств р, а из него значение Lр, при котором имеет максимум функция автокорреляции задержанного модулирующего сигнала и модуляции принятого сигнала. В нашем случае дальность определяется по максимуму функции корреляции сигнала ПЧ и опорного сигнала. Особенностью настоящего способа является непрерывность излучаемого и принятого сигналов, а также то, что определяется функция корреляции между гомодинным и опорными, искусственно созданными сигналами, причем отдельно вычисляются функции корреляции для сигналов, содержащих нечетные и четные гармоники. В результате этих операций будут получены два множества (нечетное и четное) функций корреляции:


где Lk, ψ k - параметры реального объекта, отражающего излучаемый сигнал. После выполнения с (34) и (35) простых тригонометрических преобразований получаем:


где Xp(L) и Yp(L) - базовые функции, однозначно определяющие функции корреляции реально принятого и расчетного гомодинных сигналов:

Выражения доплеровских спектров функции корреляции нечетного и четного множества получаем подстановкой (9) в (36) и (37):


Очевидно, что и нечетные, и четные функции корреляции имеют постоянные составляющие, по которым обнаруживают неподвижные объекты, а также составляющие доплеровской частоты, выделением которых методами фильтрации проводят обнаружение движущихся объектов и их селекция по скорости. Для селекции объектов по скорости, то есть для выделения из сигналов множеств (41), (42) доплеровских сигналов применимы стандартные методы спектрального анализа - (аналогового или цифрового, параллельного или последовательного).
Здесь, как и в первом алгоритме, знак разности фаз доплеровских сигналов движущихся объектов (41) и (42) определяется знаком радиальной скорости, фаза сигнала (41) изменяется на π при изменении знака скорости, а фаза (42) от знака скорости не зависит. Интегрируя по времени (для реализации сдвига фазы на π /2) доплеровский сигнал  выделенный из одной из функций корреляции, например (41), получим, умножив результат на 2π F
выделенный из одной из функций корреляции, например (41), получим, умножив результат на 2π F

Вычислив сумму и разность доплеровского сигнала (43) и доплеровского сигнала U


Поскольку функции (Yp(L)≈ Xp(L)), то очевидно, что для удаляющихся объектов (m=0) сигнал (45) значительно превышает сигнал (44), то есть отношение уровней первого и второго полных доплеровских выделенных сигналов много больше единицы. Для приближающихся объектов (m=1) имеет место большой сигнал (44), то есть указанное отношение сигналов (45) к (44) много меньше единицы. Таким образом по величине отношения амплитуд первого и второго полных доплеровских выделенных сигналов определяется направление движения объекта, то есть знак радиальной скорости. Практически определение направления происходит автоматически, поскольку при реализации алгоритма (43-45) разделяются сигналы приближающихся и удаляющихся объектов. В обоих случаях полезный сигнал определяется суммой базовых функций Zp(L)=(Yp(L)+Хp(L)), а ошибочный сигнал - функцией Wp(L)=(Yp(L)-Xp(L)), что говорит о когерентности суммирования доплеровских составляющих функций корреляции, то есть об увеличении на 3 дБ отношения сигнал/шум. Для определения знака радиальной скорости здесь может также использоваться алгоритм формулы (23) применительно к функциям корреляции (41) и (42). Равным образом приведенный алгоритм формул (43-45) разделения сигналов с разными знаками скорости применим в первом варианте способа к доплеровским сигналам, выделенным из функций амплитуд гармоник (20) и (21).
Базовые функции Xp(L), Yp(L) и их сумма Zp(L), как и классические автокорреляционные функции, имеют главный максимум при L=Lp боковые лепестки при некоторых других значениях дальности. При наличии, например, нескольких неподвижных объектов, имеющих разные дальности, наибольшие значения постоянной составляющей будут иметь функции корреляции, для которых L≈ Lp, то есть фактическая дальность объекта мало отличается от ожидаемой. Аналогично для движущихся объектов при L≈ Lp имеют максимум доплеровские составляющие функций корреляции и амплитуда полных доплеровских сигналов. Дальность движущегося объекта определяют по номеру р множества дальностей, при котором максимальна обусловленная отражением от объекта доплеровская составляющая функций корреляции, и(или) амплитуда полного доплеровского сигнала.
Таким образом, для обнаружения объектов и измерения их скоростей и дальностей по второму варианту способа задают множество значений дальности Lp, вычисляют для всех значений Lp множества опорных сигналов (31) и (32), перемножают их с сигналом ПЧ, получая множества функций корреляции (36), (37), (41), (42). Для неподвижных объектов обнаружение и определение дальности проводят по номеру множества, при котором максимальна постоянная составляющая по крайней мере одной из функций корреляции. Для движущихся объектов вычисляют полные доплеровские сигналы (44) и (45), по максимальному значению амплитуды одного из их обнаруживают объект, определяют номер элемента р и соответственно дальность Lp. Точность измерения дальности в этом алгоритме ограничивается шириной главного лепестка используемой базовой функции и относительным уровнем боковых лепестков. Для селекции объектов по скорости и измерения скоростей проводят анализ спектра по крайней мере одного из сигналов множеств (41), (42), (44) или (45), и по измеренному значению выделенной частоты определяют модуль радиальной скорости объекта. Знак радиальной скорости определяют по величине отношения амплитуд первого и второго полных выделенных доплеровских сигналов.
Третий вариант способа сочетает операции второго и первого вариантов, позволяя получить полную информацию о скоростях и дальностях движущихся объектов при существенно меньшем объеме вычислений. Обнаружение объектов и определение величин и знаков их скоростей в этом варианте определяют, применяя операции второго варианта, а дальность вычисляют с помощью операций первого варианта способа. Для этого интервал измеряемых дальностей Lmin-Lmax разбивают на Р интервалов, число которых может быть на один-два порядка меньше, чем во втором алгоритме. Для множества средних значений ожидаемых дальностей формируют соответствующие им нечетное и четное временные множества опорных сигналов вида (31) и (32), соответствующих ожидаемым сигналам ПЧ. Перемножая опорные сигналы (31) и (32) с сигналом ПЧ (10, 11), получают два множества (нечетное и четное) функций корреляции (41) и (42), выделяют из них доплеровские составляющие, а из них - полные доплеровские сигналы (44) и (45), по которым проводят обнаружение объектов и определяют их радиальную скорость. Формируют основное и квадратурное частотные множества опорных сигналов, каждый из которых содержит одну из гармоник модулирующего сигнала вида (12-15) и перемножают их отдельно (как и в первом варианте способа) с сигналом промежуточных частот (10, 11). Полученные усреднением по времени функции корреляции имеют вид (16-19). Основное и квадратурное множества коэффициентов корреляции (27-30) вычисляют перемножением функций корреляции основного и квадратурного множеств (16-19) с полным выделенным доплеровским сигналом обнаруженного объекта вида (44) или (45). Вычисляя их отношения, определяют фазы гармоник  и фазочастотную характеристику (24), а следовательно, и дальность объекта (или объектов), ответственного за появление доплеровского сигнала выделенной частоты. Этим алгоритмом достигается существенное (относительно первого алгоритма) уменьшение погрешности измерения, поскольку сигналы (44) или (45), полученные в результате оптимальной фильтрации, имеют лучшее отношение сигнал/шум.
и фазочастотную характеристику (24), а следовательно, и дальность объекта (или объектов), ответственного за появление доплеровского сигнала выделенной частоты. Этим алгоритмом достигается существенное (относительно первого алгоритма) уменьшение погрешности измерения, поскольку сигналы (44) или (45), полученные в результате оптимальной фильтрации, имеют лучшее отношение сигнал/шум.
В ряде случаев реализация заданных значений предельной дальности затруднительна либо по причине технической сложности получения достаточно большого уровня мощности излучаемого сигнала, либо из-за административных ограничений на уровень этой мощности. Для решения этой проблемы применяют многопозиционный прием, то есть когерентное сложение сигналов, принятых в нескольких пространственно разнесенных позициях (см. “Справочник”, том 4, стр. 193). Поскольку при этом суммируются амплитуды принятых отраженных от объектов сигналов и мощности некоррелированных шумов, то каждая дополнительная позиция приема увеличивает отношение сигнал/шум на 3 дБ. Учитывая, что предельная дальность пропорциональна корню четвертой степени излучаемой мощности, приемом отраженного сигнала в восьми позициях может быть достигнуто удвоение предельной дальности. Поскольку расстояния, пройденные отраженным сигналом от объекта до разных позиций, как и разности фаз центральных колебаний принятых в них сигналов, зависят от угла направления на отражающий объект, то появляется возможность определения угловых координат объектов.
Возможность когерентного суммирования сигналов, принятых в нескольких, например, двух позициях А и В, базируется на соотношении, полученном для разности фаз центральных колебаний сигналов, принятых в этих позициях (см. Сайбель А.Г. Основы радиолокации. М.: Советское радио, 1961, стр. 165):

где  - угол между нормалью отрезка АВ и направлением на объект, D - расстояние между позициями А и В.
- угол между нормалью отрезка АВ и направлением на объект, D - расстояние между позициями А и В.
Это соотношение может быть легко распространено на произвольное число позиций приема. Зондирующий сигнал при этом излучают из произвольной позиции, которая в частном случае может совпадать с одной из позиций приема.
Сигналы, принятые в каждой позиции, по общему алгоритму способа перемножают (смешивают) с излучаемым сигналом, гомодинные сигналы усиливают в заданной полосе, получая сигналы промежуточных частот вида (10, 11) для каждой позиции. Для двух позиций, например, имеем:
При D<<Λ и равных амплитудах  сигналы (47) и (48) отличаются либо по амплитудам четных и нечетных гармоник (для неподвижных объектов), либо по фазам доплеровских составляющих.
сигналы (47) и (48) отличаются либо по амплитудам четных и нечетных гармоник (для неподвижных объектов), либо по фазам доплеровских составляющих.
Сущность четвертого варианта способа алгоритма состоит в применении алгоритма второго вариант способа к обработке сигналов, полученных при многопозиционном приеме. При этом разбивают измеряемые дальности на Р интервалов, формируют соответствующие средним дальностям интервалов нечетное и четное временные множества опорных сигналов (31) и (32), которые в каждой позиции перемножают с сигналами ПЧ (47-48), полученными в этой позиции. В результате этих операций после упрощений и простых тригонометрических преобразований получаем аналогично (41) и (42) по два множества (нечетное и четное) функций корреляции в каждой позиции:

Из доплеровских сигналов движущихся объектов, выделенных из функций корреляции, получают в каждой позиции аналогично (43-45) первый и второй полные выделенные доплеровские сигналы k-го объекта:




и суммируют их, сдвигая фазу в одной из позиций (например, В) на величину фазовой коррекции  , получая первый и второй суммарные полные доплеровские сигналы:
, получая первый и второй суммарные полные доплеровские сигналы:


Очевидно, что выбором величины фазовой коррекции  когда второй косинус в уравнениях (58-59) равен единице, достигается максимальный (для двух позиций удвоенный) уровень полного доплеровского сигнала. Направление наилучшего приема сигналов, отраженных от движущихся объектов, изменяется (путем, например, ступенчатого изменения
когда второй косинус в уравнениях (58-59) равен единице, достигается максимальный (для двух позиций удвоенный) уровень полного доплеровского сигнала. Направление наилучшего приема сигналов, отраженных от движущихся объектов, изменяется (путем, например, ступенчатого изменения  ) относительно направления нормали к отрезку, соединяющему позиции приема. Как и во втором алгоритме, по номеру множества р, суммарный сигнал (58) или (59) которого максимален, определяется дальность обнаруженного объекта, по доплеровской частоте любого из суммарных полных доплеровских сигналов - модуль радиальной скорости, а по величине отношения амплитуд первого и второго суммарных полных доплеровских сигналов определяется направление движения объекта, то есть знак радиальной скорости.
) относительно направления нормали к отрезку, соединяющему позиции приема. Как и во втором алгоритме, по номеру множества р, суммарный сигнал (58) или (59) которого максимален, определяется дальность обнаруженного объекта, по доплеровской частоте любого из суммарных полных доплеровских сигналов - модуль радиальной скорости, а по величине отношения амплитуд первого и второго суммарных полных доплеровских сигналов определяется направление движения объекта, то есть знак радиальной скорости.
Для неподвижных объектов, когда доплеровская частота равна нулю, сдвиг фазы на величину  физически нереализуем, поэтому для определения расстояния из функций корреляции (49-52) вычисляют суммарные по позициям нечетную и четную функции корреляции:
физически нереализуем, поэтому для определения расстояния из функций корреляции (49-52) вычисляют суммарные по позициям нечетную и четную функции корреляции:


Из выражений (61-62) следует, что направление наилучшего приема сигналов, отраженных от неподвижных объектов совпадает с направлением нормали к отрезку, соединяющему позиции приема. Дальность неподвижных объектов определяют по номеру множества суммарных нечетных и(или) четных функций корреляции.
Для определения угловой координаты движущегося обнаруженного объекта суммарные доплеровские сигналы (первый или второй в зависимости от знака радиальной скорости) определяют для нескольких значений величины коррекции фазы  , а из соответствующей максимальному значению сигналов величины
, а из соответствующей максимальному значению сигналов величины  и известного расстояния между позициями приема определяют угловую координату по формуле, следующей из (46):
и известного расстояния между позициями приема определяют угловую координату по формуле, следующей из (46):

Угловая координата как движущегося, так и неподвижного объекта может быть также вычислена из функций корреляции (49-52). Через отношения (49) к (50), а (51) к (52) вычисляются разности фаз излучаемого и принятого в позициях сигналов

и разность фаз принятых в позициях сигналов

из которой определяют угловую координату:

Пятый вариант способа использует операции третьего варианта применительно к многопозиционному приему, позволяя получить полную информацию о координатах и скоростях движущихся объектов при существенно меньшем объеме вычислений. При этом измерение величины и знака скорости определяется операциями второго варианта, дальности - операциями первого варианта, а угловых координат - операциями четвертого варианта способа, причем эти операции проводятся с суммарными сигналами, полученными сложением одноименных функций корреляции и вторичных функций всех позиций. Интервал измеряемых дальностей Lmin-Lmax разбивают на Р интервалов, число которых может быть на один-два порядка меньше, чем в четвертом варианте. Для множества средних значений ожидаемых дальностей формируют соответствующие им нечетное и четное временные множества опорных сигналов вида (31) и (32), равных соответствующим ожидаемым сигналам ПЧ. Перемножая (31) и (32) с сигналами ПЧ (47-48), получают для каждой позиции по два множества (нечетное и четное) функций корреляции (49-53), а из них - полные доплеровские сигналы вида (44) и (45) и суммарные по позициям полные доплеровские сигналы, используемые для обнаружения отражающих объектов. Перед суммированием, как и в четвертом варианте, фаза полных доплеровских сигналов сдвигается на величину коррекции фазы, заданную для каждой позиции (для двух позиций фаза сдвигается в одной из них, например В -  ). По доплеровским частотам суммарных полных доплеровских сигналов определяют радиальную скорость объектов, а по отношению амплитуд первого и второго суммарных полных доплеровских сигналов - знак радиальной скорости. Для обеспечения наилучшего приема суммарные полные доплеровские сигналы определяют для нескольких значений фазовой коррекции
). По доплеровским частотам суммарных полных доплеровских сигналов определяют радиальную скорость объектов, а по отношению амплитуд первого и второго суммарных полных доплеровских сигналов - знак радиальной скорости. Для обеспечения наилучшего приема суммарные полные доплеровские сигналы определяют для нескольких значений фазовой коррекции  (например ступенчато изменяя ее величину), а по значению
(например ступенчато изменяя ее величину), а по значению  , при котором их амплитуда максимальна, определяют угловую координату по формуле (63). Как и в четвертом варианте способа, угловая координата может вычисляться по алгоритму (64-64).
, при котором их амплитуда максимальна, определяют угловую координату по формуле (63). Как и в четвертом варианте способа, угловая координата может вычисляться по алгоритму (64-64).
Для определения дальности выделяют доплеровский сигнал обнаруженного объекта вида (58) или (59). Формируют основное и квадратурное частотные множества опорных сигналов, каждый из которых содержит одну из гармоник модулирующего сигнала вида (12) и (13), (14) и (15), и перемножают их отдельно с сигналами промежуточных частот (47-48) одной или нескольких позиций (как и в первом варианте способа), получая функции корреляции, спектральные составляющие которых определяются выражениями:








Функции корреляции затем суммируются по позициям, причем как и при суммировании полных доплеровских сигналов, фаза доплеровских составляющих сдвигается на величину фазовой коррекции  , для чего, например, соответствующие функции корреляции задерживаются на время, связанное с заданной величиной фазовой коррекции соотношением
, для чего, например, соответствующие функции корреляции задерживаются на время, связанное с заданной величиной фазовой коррекции соотношением  . Эта операция обеспечивает полное суммирование доплеровских составляющих функций корреляции частотных множеств. Полученные суммарные функции корреляции
. Эта операция обеспечивает полное суммирование доплеровских составляющих функций корреляции частотных множеств. Полученные суммарные функции корреляции  ,
,  ,
,  и
и  перемножают с одним из суммарных полных сигналов (61-62), например
перемножают с одним из суммарных полных сигналов (61-62), например  , a результат усредняют по времени (аналогично (27-30). Из полученных в результате коэффициентов корреляции основного и квадратурного множеств (черта означает усреднение по времени):
, a результат усредняют по времени (аналогично (27-30). Из полученных в результате коэффициентов корреляции основного и квадратурного множеств (черта означает усреднение по времени):




определяют множество фаз гармоник сигнала ПЧ  и фазочастотную характеристику гармоник
и фазочастотную характеристику гармоник  из параметров которой вычисляют дальности объектов. Применение этого алгоритма позволяет определить разность дальностей объектов, движущихся с равными скоростями.
из параметров которой вычисляют дальности объектов. Применение этого алгоритма позволяет определить разность дальностей объектов, движущихся с равными скоростями.
Система для реализации изложенного выше способа измерения дальности и скорости объектов содержит, как и прототип, антенно-фидерное устройство (АФУ), излучающее зондирующий и принимающее отраженный сигнал, гомодинное приемопередающее устройство (ППУ), выполняющее функции формирования частотно-модулированного микроволнового зондирующего сигнала, перемножения (смешения) с ним принятого отраженного сигнала и усиления полученного гомодинного сигнала, а также процессор, формирующий модулирующий сигнал и определяющий координаты и скорости отражающих объектов. На выходе ПЧ ППУ формируется сигнал промежуточных частот (ПЧ), содержащий усиленную полосовым усилителем ПЧ заданную часть спектра гомодинного сигнала. Существенным отличием предлагаемого устройства является то, что к выходу ПЧ ППУ через аналого-цифровой преобразователь (АЦП) подключен коррелометр, выполненный на базе цифрового сигнального процессора, наделенный программами формирования опорных сигналов, состоящих из гармоник модулирующего сигнала, и вычисления функций корреляции сигнала ПЧ и опорных сигналов, а также вторичных функций, вычисляемых из функций корреляции (функции амплитуд и фаз гармоник спектра ПЧ, постоянные составляющие функций корреляции, выделенные и полные доплеровские сигналы, коэффициенты корреляции, а также все суммарные по позициям функции и сигналы). Информация о функциях корреляции и вторичных функциях в цифровой форме через шину данных передается в процессор, который вычисляет и отображает на дисплее (при необходимости передает во внешнюю информационную сеть) координаты и скорости обнаруженных объектов.
Выход и входы микроволновых сигналов (или общий выход-вход) ППУ соединены с входом и выходами (или общим входом-выходом) АФУ. Аналоговый вход управления частотой зондирующего сигнала ППУ соединен с аналоговым выходом процессора. Выход сигнала промежуточных частот (далее - выход ПЧ) ППУ соединен с входом АЦП. Коррелометр, процессор, АЦП и дисплей соединены шиной передачи цифровых данных (далее - шина данных). В рамках настоящего изобретения предлагаются пять вариантов структуры радиолокационной системы для измерения скоростей и координат объектов. Первые три варианта системы реализуют любой из первых трех вариантов способа измерения, четвертый и пятый вариант системы - четвертый или пятый варианты способа.
В первом варианте структуры системы ППУ содержит подключенный выходом к микроволновому выходу ППУ генератор зондирующего сигнала (далее - генератор), имеющий вход управления частотой, смеситель, первый и второй входы которого соединены соответственно с микроволновым входом ППУ и выходом генератора, а выход - с входом полосового усилителя. Микроволновые выход и вход ППУ соединены соответственно с входом и выходом АФУ. В этом варианте структуры АФУ содержит либо одну приемопередающую антенну и ферритовый циркулятор, плечи которого соединены с антенной, а также с входом и выходом АФУ, либо две антенны, соединенные с входом и выходом АФУ.
Во втором варианте структуры ППУ функции генерации зондирующего сигнала и перемножения с ним принятого сигнала выполняются автодинным узлом (см. И.М. Коган. Ближняя радиолокация. М.: Советское радио, стр. 39-40, 46-52, 70-120; Е.М. Гершензон и др. Общие характеристики и особенности автодинного эффекта в автогенераторах. “Радиотехника и электроника” том XXVII, 1982, №1, стр. 104), общий микроволновый выход-вход которого через выход-вход ППУ подключен к общему входу-выходу АФУ. Гомодинный сигнал на вход полосового усилителя может сниматься при этом с цепи питания автодинного узла.
В третьем варианте структуры системы в ППУ используется проходной смеситель, выполненный, например, в виде отрезка волновода, в котором параллельно узкой стенке включены смесительные диоды. Расстояние между диодами по оси волновода составляет λ /2. К первому фланцу смесителя подключен выход генератора, а второй фланец подключен к выходу-входу ППУ. Связь диодов с волноводом, зависящая от расстояния до узкой стенки, выбирается такой, чтобы и на первом и на втором диодах рассеивалось по 25% мощности генератора, что выполняется, если связь второго диода обеспечивает отбор одной трети проходящей мощности. Такое размещение диодов обеспечивает противофазность, то есть компенсацию, выделяющихся на диодах напряжений, вызванных амплитудной модуляцией генератора и сложение гомодинных сигналов. Этот вариант ППУ, как и автодинный, имеет общий выход-вход, к которому общим входом-выходом подключено АФУ. Во втором и третьем варианте структуры используется АФУ, выполненное в виде приемопередающей антенны.
Для реализации четвертого и пятого вариантов способа измерения применимы и четвертый, и пятый варианты структуры системы, отличающиеся соответственно от первого или третьего вариантов структуры системы наличием в составе ППУ дополнительных смесителей, первые и вторые входы каждого из которых подключены соответственно к микроволновым входам ППУ и выходу генератора. Выходы смесителей подключены через дополнительные полосовые усилители к выходам ПЧ ППУ. Каждый из выходов ПЧ ППУ связан с входом соответствующего АЦП, подключенного к шине данных. Общее число выходов ПЧ ППУ равно числу его микроволновых входов, числу смесителей и усилителей ПЧ. В этих вариантах структуры возможно использование одного АЦП, вход которого соединен с выходом коммутатора. Вход управления коммутатора программой процессора в этом случае подключен к шине данных, а сигнальные входы - к выходам ПЧ ППУ. АФУ, используемые в четвертом и пятом вариантах структуры системы, имеют несколько антенн, располагаемых на одной линии (в одном измерении), если необходимо измерение одной угловой координаты. Если измеряют обе угловые координаты, антенны располагают в двух измерениях, например в трех углах квадрата.
В четвертом варианте структуры системы выход генератора подключен к микроволновому выходу ППУ. АФУ в этом варианте может содержать либо одну приемопередающую антенну и ферритовый циркулятор, одно плечо которого соединено с приемопередающей антенной, а два других - с входом и первым выходом АФУ, и приемные антенны, число которых на одну меньше числа смесителей ППУ, либо несколько антенн, одна из которых - передающая - подключена к входу АФУ, а остальные, число которых равно числу смесителей ППУ, - к выходам АФУ.
ППУ пятого варианта структуры системы представляет собой ППУ третьего варианта, дополненное несколькими смесителями, и имеет один микроволновый выход-вход и несколько микроволновых входов. АФУ содержит одну приемопередающую антенну, соединенную с выходом-входом АФУ, и несколько приемных антенн, соединенных с выходами АФУ.
Предлагаемые способ и система позволяют ослабить влияние помехи, обусловленной паразитным просачиванием излучаемого сигнала в канал приема полезного сигнала, отраженного от измеряемых объектов. Причинами помехи могут быть нежелательные отражения от неоднородностей АФУ или близко расположенных объектов, наводки из-за низкой радиогерметичности узлов и передающих линий АФУ и ППУ, а ее следствием - нарушение балансных свойств смесителя, и, следовательно, уменьшение чувствительности приемного канала. При характерном для радаров контроля за дорожным движением уровне излучаемой мощности 50 милливатт отраженная на смеситель мощность составит 2 милливатта при КСВ антенны 1,5. Важность проблемы очевидна, поскольку мощность генератора, направляемая на гетеродинный вход смесителя, имеет тот же порядок. Более того, модуляция частоты излучаемого сигнала приводит к амплитудной модуляции принятого сигнала, что может существенно снизить чувствительность приемного канала, то есть уменьшить предельную дальность. Особенность предлагаемого способа, в частности практическое отсутствие в полезном гомодинном сигнале постоянной составляющей и первой гармоники при преобладании их в сигнале помехи, позволяет, во-первых, оценить уровень помехи, а во-вторых создать на входе приемного канала, то есть на входе смесителя компенсирующий сигнал, равный помехе по амплитуде и противоположный по фазе.
Сигнал компенсации помехи получают ответвлением части сигнала генератора направлением его на вход смесителя, при этом устанавливаются определенные значения его амплитуды и фазы. Влияние помехи сводится к нулю, если фазы помехи и компенсирующего сигнала в любой момент времени противоположны, а амплитуды равны. Практически достаточно, чтобы сигнал помехи отсутствовал в гомодинном сигнале.
Компенсацию помехи осуществляют, например, следующим образом. Смеситель приемопередающего устройства выполняют по диодной балансной схеме с отдельными выводами от каждого диода. На диоды через второй (гетеродинный) вход смесителя в противофазе подают излучаемый сигнал от генератора Ег=Е0гcosω t. Через первый (сигнальный) вход на диоды в одинаковой фазе поступает сумма помехи En=E0ncos(ω t+ϕ n) и компенсирующего сигнала Eком=E0комcos(ω t+ϕ ком), составляющая остаточный сигнал Eост=E0остcos(ω t+ϕ ост), где:


Фаза остаточного сигнала равна π /2 при выполнении условия:

Напряжения частоты зондирующего сигнала на первом и втором диодах смесителя имеют вид:


Если вольтамперная характеристика диодов смесителя квадратичная, то для напряжений низкочастотных составляющих на отдельных для каждого диода сопротивлениях нагрузки Rн=Rн1=Rн2 получим:


Сумма (сигнал суммы) и разность (сигнал разности) напряжений на диодах равны соответственно


Из выражений (82-83) следует:
- Сигнал разности, являющийся низкочастотной частью гомодинного сигнала, характеризует уровень помехи, возникающей из-за отражений и просачивания в трактах излучаемого и принятого сигналов.
- Если подстройкой фазы компенсирующего сигнала обеспечить выполнение условия (81), то балансные свойства смесителя восстанавливаются, а сигнал помехи устраняется из спектра гомодинного сигнала. При этом, однако, не контролируется уровень мощности, рассеиваемой на диодах.
- Наиболее совершенной является схема компенсации, где фаза компенсирующего сигнала системой регулирования фазы устанавливается по критерию равенства нулю сигнала разности (83), а амплитуда - системой регулирования амплитуды по критерию заданного уровня сигнала суммы (82).
- Для регулирования фазы и амплитуды компенсирующего сигнала могут применяться аналоговые или цифровые схемы управления компенсацией помехи одновременного или поочередного действия. Это может быть, например, комбинация аналоговых систем автоматического регулирования фазы (АРФ) и амплитуды (АРА).
- В простейших случаях, когда снижение чувствительности из-за воздействия амплитудных шумов генератора несущественно, возможно применение в ППУ однодиодного смесителя с одним входом, перемножающего остаточный и принятый сигналы. В этом случае компенсирующий сигнал используется в качестве гетеродинного, а прямое соединение смесителя и генератора отсутствует.
Особенности предлагаемого способа и устройства позволяют исключить влияние на точность нелинейности фазочастотной характеристики, оцениваемой обычно через величину неравномерности группового времени запаздывания (ГВЗ). Эта нелинейность приводит к искажению фаз гармоник спектра сигнала ПЧ, то есть фазочастотной характеристики сигнала ПЧ, и как следствие к появлению погрешности измерения дальностей. Для периодического измерения реальной фазочастотной характеристики в варианте структуры системы коррелометр дополняется аналоговым выходом, соединенным с дополнительным входом ППУ, связанным с входом полосового усилителя. На вход полосового усилителя одновременно или поочередно через дополнительный аналоговый выход коррелометра выдаются тестовые сигналы частотного множества вида

Прошедшие усилитель сигналы

получают зависящий от частоты сдвиг фазы  , который определяют, вычисляя основной и квадратурный коэффициенты корреляции сигналов:
, который определяют, вычисляя основной и квадратурный коэффициенты корреляции сигналов:


а из них зависимость фазы от частоты, то есть реальную фазочастотную характеристику полосового усилителя:

Вычисление отклонений измеренной ФЧХ от идеальной линеаризованной позволяет вычислить поправки, которые необходимо ввести в фазы гармоник опорных сигналов, чтобы компенсировать нелинейность ФЧХ.
Таким образом, поставленная задача обеспечения высокой чувствительности и точности измерения при минимальной стоимости средств транспортной радиолокации реализуется согласно изобретению за счет применения корреляционных методов анализа гомодинного сигнала, позволяющих при предельной простоте аналогового комплекса выполнять оптимальную обработку непрерывного сигнала при практически любом времени накопления.
Далее изобретение поясняется с помощью чертежей, где:
на фиг.1 представлена общая структурная схема системы для измерения скоростей и координат объектов,
на фиг.2 показана базовая блок-схема алгоритма обнаружения и измерения скорости объектов,
на фиг.3 представлена схема соединенных приемопередающего и антенно-фидерного устройств первого варианта структуры системы для измерения скоростей и координат объектов,
на фиг.4 представлена схема соединенных приемопередающего и антенно-фидерного устройств второго варианта структуры системы для измерения скоростей и координат объектов,
на фиг.5 представлена схема соединенных приемопередающего и антенно-фидерного устройств третьего варианта структуры системы для измерения скоростей и координат объектов,
на фиг.6 представлена схема соединенных приемопередающего и антенно-фидерного устройств четвертого варианта структуры системы для измерения скоростей и координат объектов,
на фиг.7 представлена схема соединенных приемопередающего и антенно-фидерного устройств пятого варианта структуры системы для измерения скоростей и координат объектов,
на фиг.8 представлена схема приемопередающего устройства системы первого варианта структуры со схемой компенсации помех,
на фиг.9 представлена эквивалентная схема балансного смесителя, модифицированного для использования в схеме компенсации помех,
на фиг.10 представлены графики, характеризующие зависимость от расстояния полных корреляционных функций, рассчитанных для второго варианта способа.
Система для измерения скоростей и координат объектов (см. фиг.1) содержит антенно-фидерное устройство (АФУ) 1, приемопередающее устройство (ППУ) 2, аналого-цифровой преобразователь (АЦП) 3, коррелометр 4, процессор 5 и дисплей 6. Микроволновый выход (в вариантах структуры выход-вход) ППУ 2 подключен к входу (в вариантах структуры входу-выходу) АФУ 1, в выходы АФУ 1 подключены к входам ППУ 2. К выходам ПЧ ППУ 2 подключены входы аналого-цифрового преобразователя 3.
При этом могут использоваться как несколько АЦП, подключенные к соответствующим выходам ППУ 2, так и единственный АЦП, подключенный либо непосредственно к единственному выходу ПЧ ППУ 2, либо через коммутатор (не показано), входящий в состав АЦП 3 и управляемый коррелометром 4, - к нескольким выходам ПЧ. АЦП 3, коррелометр 4, процессор 5 и дисплей 6 соединены шиной передачи цифровых данных 7 (далее - шина данных), которая может быть связана с внешней информационной сетью. ППУ 2 имеет вход управления частотой зондирующего сигнала, соединенный с аналоговым выходом процессора 5. В вариантах системы коррелометр 4 может иметь аналоговый вывод тестового сигнала, соединенный с вторым входом ППУ.
Предлагаемый способ измерения скоростей и координат объектов с использованием предлагаемой системы осуществляют следующим образом. Приемопередающим устройством 2 формируют непрерывный периодически модулированный по частоте зондирующий микроволновый сигнал, передают его в антенно-фидерное устройство 1, посредством которого излучают его в пространство и принимают в одной или нескольких пространственных позициях отраженный от объектов сигнал. С помощью процессора 5 формируют периодический сигнал управления частотой зондирующего сигнала (модулирующий сигнал) и передают его в аналоговой форме на первый вход ППУ 2, а в цифровой форме через шину данных - в коррелометр 4. Принятые сигналы передают в приемопередающее устройство 2, где отдельно перемножают (смешивают) их с излучаемым сигналом и, выделяя низкочастотные (разностные) компоненты результатов перемножения, получают гомодинные сигналы, усиливают заданную часть их спектра и направляют на соответствующие выходы промежуточных частот (ПЧ) ППУ 2. Аналого-цифровым преобразователем 3 переводят сигналы ПЧ в цифровую область и передают их через шину данных 7 в коррелометр 4. На базе модулирующего сигнала, используя специальную программу коррелометра 4, формируют опорные сигналы частотных и (или) временных множеств, состоящие из гармоник частоты модуляции, и вычисляют функции корреляции опорных сигналов и сигналов ПЧ, а также вторичные функции (функции амплитуд и фаз гармоник, постоянные и доплеровские составляющие, полные доплеровские сигналы, коэффициенты корреляции и (при многопозиционном приеме) суммарные по позициям приема функции корреляции, функции гармоник и полные доплеровские сигналы). Полученную информацию передают в процессор 5, определяющий скорости и координаты обнаруженных объектов. При необходимости, информацию, полученную процессором, отображают на дисплее 6 или передают через шину данных 7 во внешнюю информационную сеть для дальнейшей обработки.
На фиг.2 приведена блок-схема базового алгоритма обнаружения, а также измерения скоростей и координат отражающих объектов системой, показанной на фиг.1. Все операции, показанные на схеме, выполняются в цифровой области. Посредством программы коррелометра перемножают (блок 3) сигнал ПЧ вида (11) (блок 2) и один из опорных сигналов (блок 4): основного или квадратурного частотных множеств вида (12-15) для определенного значения N, либо четного или нечетного временных множеств вида (31-32) для определенного значения р, а результат интегрируют (блок 5), получая соответствующую функцию корреляции вида (16-19, 34-35), вычисляют вторичные функции (блок 6), по уровню которых обнаруживают отражающие объекты (блок 9), а по параметрам вычисляют их скорости и координаты (блок 10). В блоке 9 посредством программы процессора 5 проводят сравнение уровня полученного сигнала с заданным уровнем U* и делают вывод о наличии или отсутствии отражающего объекта. (Уровнем сигнала считают величину постоянной составляющей или амплитуду доплеровской составляющей соответствующей функции). Если уровень сигнала меньше уровня U*, то есть отраженный от объекта сигнал отсутствует, изменяют (блок 7) значение р (или N) и повторяют цикл (блоки 2-8). По наличию доплеровского сигнала (для неподвижных объектов - постоянной составляющей) в функции корреляции либо во вторичной функции делают вывод об обнаружении объекта (блок 9). Измеряя частоту выделенного доплеровского сигнала, определяют радиальную скорость обнаруженного объекта. По знаку разности фаз нечетных и четных доплеровских сигналов (23) или по величине отношения первого и второго полных доплеровских сигналов (58, 59) определяют знак радиальной скорости. Если измерение проводится по второму алгоритму, то по значению р определяют дальность обнаруженного объекта. При измерении по первому или третьему алгоритму для множества значений N вычисляют коэффициенты корреляции вида (27-30), определяют из них фазочастотную характеристику по алгоритму (24), а из нее - дальности объектов. В алгоритме фиг.2 применено последовательное вычисление функций корреляции частотных или временных множеств. При наличии достаточных вычислительных мощностей коррелометра может быть применено одновременное (параллельное) вычисление функций корреляции.
Возможность обнаружения объекта и определения его дальности по второму алгоритму поясняется фиг.10, где приведены расчетные зависимости полной (суммы нечетной и четной) функции корреляции временного множества для двух значений ожидаемой дальности: 300 и 900 метров. Расчеты выполнены для радара контроля дорожного движения. Очевидно, что главные максимумы функций корреляции имеют место при равенстве ожидаемой Lp и фактической дальности, а ширина главного лепестка имеет для данного случая величину Δ Lp=12 м. Поэтому если диапазон измеряемых дальностей 1200 метров разбить, например, на 100 равноотстоящих интервалов, средняя дальность Lр которых кратна 12 метрам, сформировать для них опорные сигналы временных нечетного и четного множеств и вычислить множество функций корреляции сигнала ПЧ и опорных сигналов, то сигнал, отраженный от объекта, находящегося на расстоянии Lp±6 м, обусловит максимальный уровень соответствующей функции корреляции, по которому он будет обнаружен, а его дальность определена.
ППУ 2 в зависимости от особенностей применения может выполняться в нескольких отличающихся по структуре вариантах, определяющих варианты структуры системы. Любой из трех первых вариантов структуры системы может осуществлять любой из первых трех алгоритмов способа, любой из четвертого и пятого вариантов структуры реализуют и четвертый, и пятый алгоритмы.
В первом варианте (фиг.3) структуры ППУ 2 имеет микроволновые выход и вход, а АФУ 1 - соединенные с ними вход и выход. ППУ 2 содержит генератор 8 зондирующего сигнала (далее генератор), имеющий вход управления частотой, который является входом управления частотой приемопередающего устройства, смеситель 9 и полосовой усилитель 10. АФУ 1 содержит либо ферритовый циркулятор 11 и приемопередающую антенну 12 либо две антенны: передающую и приемную (не показаны), вход и выход которых являются соответственно входом и выходом АФУ 1. Выход генератора 8 подключен к второму входу смесителя 9 и к микроволновому выходу ППУ, первый вход смесителя 9 подключен к микроволновому входу ППУ, а выход гомодинного сигнала соединен с входом полосового усилителя 10. Выход полосового усилителя подключен к выходу ПЧ приемопередающего устройства 2. Первое и второе плечи циркулятора 11 являются входом и выходом антенно-фидерного устройства, а третье плечо подключено к приемопередающей антенне.
В первом варианте устройства частотно-модулированный зондирующий сигнал формируют генератором 8, подают его через микроволновый выход на вход АФУ 1 и излучают его приемопередающей (или в варианте передающей) антенной. Отраженный, принятый приемопередающей (или приемной) антенной сигнал с выхода АФУ 1 через микроволновый вход ППУ 2 подают на смеситель 9, где смешивают (перемножают) с сигналом генератора 8, то есть с излучаемым сигналом. Полученный на выходе смесителя 9 гомодинный сигнал вида (11) усиливают в заданной полосе частот полосовым усилителем 10 и подают на выход ПЧ ППУ 2. Система, структура которой построена по первому варианту, является наиболее универсальной и может применяться, например, в полицейских радарах с уровнем излучаемой мощности 50-100 милливатт.
Во втором варианте (см. фиг.4) структуры системы приемопередающее устройство 2 выполнено в виде автодинного узла 13, выход-вход и вход управления частотой которого являются соответственно микроволновым выходом-входом и входом управления частотой приемопередающего устройства 2. ППУ 2 содержит, кроме того, полосовой усилитель 10, а антенно-фидерное устройство 1 выполнено в виде приемопередающей антенны. Вход-выход АФУ 1, то есть антенны, подключен к выходу-входу ППУ 2, а выход гомодинного сигнала автодинного узла 13 через полосовой усилитель 10 подключен к выходу ПЧ ППУ 2. Автодинный узел 13 представляет собой автогенератор, выполняющий одновременно функции смесителя (см., например, Воторопин С.Д., Юрченко В.И. Автодины на диодах Ганна и устройства на их основе. “Электронная промышленность”, 1998, вып. 1-2, стр. 110-115; Воторопин С.Д., Носков В.Я. Приемопередающие модули на слаботочных диодах Ганна для автодинных систем. “Электронная техника”, Сер. СВЧ-техника, 1993, вып. 4 (458), стр. 70-72). Зондирующий сигнал генерируют, например, диодом Ганна и излучают приемопередающей антенной АФУ 1. Принятый АФУ 1 отраженный сигнал поступает на диод Ганна, где благодаря его нелинейности перемножается с излучаемым сигналом. Гомодинный сигнал извлекают, например, из цепи питания диода Ганна с помощью трансформатора (не показан). Как и в первом варианте, гомодинный сигнал усиливают полосовым усилителем 10 и выводят через выход ПЧ ППУ 2. Автодинный вариант системы наиболее прост и дешев, однако из-за низкой чувствительности и соответственно малой предельной дальности он может быть рекомендован для датчиков препятствий при движении транспортного средства задним ходом.
В третьем варианте (см. фиг.5) системы АФУ 1 выполнены, как и во втором варианте, в виде приемопередающей антенны 12, вход-выход антенны 12 является входом-выходом АФУ 1, который подключен к выходу-входу ППУ 2. Приемопередающее устройство 2 содержит генератор 8, вход управления частотой которого является входом управления частотой приемопередающего устройства 2, проходной смеситель 14 и полосовой усилитель 10. Выход генератора 8 подключен к входу проходного смесителя 14, выход-вход которого соединен с выходом-входом ППУ 2. Выход гомодинного сигнала проходного смесителя подключен к входу полосового усилителя 10, выход которого является выходом ПЧ ППУ 2. Проходной смеситель 14 может быть выполнен в виде отрезка волновода (не показан), один фланец которого подключен к генератору 8 и является входом, а другой фланец - выходом-входом смесителя 14, соединенным с выходом-входом ППУ 2. С отрезком волновода в этом случае связаны два смесительных диода, расстояние между которыми по оси волновода составляет четверть длины волны. Связь диодов с волноводом подбирается так, чтобы на первом, ближнем к входу диоде рассеивалась четверть мощности генератора, а на втором - треть проходящей мощности. Низкочастотные выводы диодов соединены и подключены к выходу гомодинного сигнала смесителя. Легко видеть, что проходной смеситель (аналогично балансному) подавляет амплитудные шумы генератора, хотя потери мощности сигнала при передаче (и приеме) составляют около 3 дБ. В этом варианте устройства частотно-модулированный зондирующий сигнал формируют генератором 8, подают его через смеситель 14 и микроволновый выход-вход ППУ 2 на вход-выход АФУ 1 и излучают приемопередающей антенной. Отраженный, принятый приемопередающей антенной сигнал с выхода АФУ 1 через микроволновый выход-вход ППУ подают на выход-вход смесителя 14, где смешивают (перемножают) с сигналом генератора 8, то есть с излучаемым сигналом. Полученный на выходе смесителя гомодинный сигнал вида (11) усиливают в заданной полосе частот полосовым усилителем и выводят через выход ПЧ ППУ 2. Третий вариант структуры системы применяют там, где уровень излучаемой мощности ограничен несколькими милливаттами, а низкая стоимость должна сочетаться с высокими техническими характеристиками.
Четвертый и пятый варианты структуры системы предназначены для реализации алгоритмов многопозиционного приема и образованы из структур соответственно первого и второго вариантов дополнением АФУ одной или несколькими приемными антеннами, а ППУ - соответствующим числом смесителей и полосовых усилителей.
В четвертом варианте структуры системы (см. фиг.6) АФУ 1 содержит передающую 15 и несколько приемных 16а, 16б, 16в антенн, вход и выходы которых являются соответственно входом и выходами АФУ 1. В варианте АФУ передающая и одна приемная антенна заменяются циркулятором (не показан), первое и второе плечи которого являются входом и одним из выходов АФУ 1, а третье подключено к приемопередающей антенне. ППУ 2 содержит генератор 8 зондирующего сигнала, имеющий вход управления частотой, который является входом управления частотой приемопередающего устройства 2, несколько смесителей 9а, 9б, 9в и полосовых усилителей 10а, 10б, 10в. Выход генератора 8 подключен к второму входу каждого из смесителей 9 и к микроволновому выходу ППУ 2, первые входы смесителей 9а, 9б, 9в подключены к микроволновым входам ППУ 2, а выходы соединены соответственно с входами полосовых усилителей 10а, 10б, 10в. Выходы полосовых усилителей подключены к выходам ПЧ приемопередающего устройства 2. Количества приемных антенн 16, смесителей 9, полосовых усилителей 10 и выходов ПЧ равны числу позиций приема.
В четвертом варианте устройства частотно-модулированный зондирующий сигнал формируют генератором 8, подают его через микроволновый выход на вход АФУ 1 и излучают его передающей (или в варианте приемопередающей) антенной. Отраженные, принятые антеннами сигналы с выходов АФУ 1 через микроволновые входы ППУ 2 подают на смесители 9а, 9б, 9в, где смешивают (перемножают) с сигналом генератора 8, то есть с излучаемым сигналом. Полученные на выходе смесителя гомодинные сигналы вида (47-48) усиливают в заданной полосе частот полосовыми усилителями 10а, 10б, 10в и подают на выходы ПЧ ППУ 2.
В пятом варианте структуры системы (см фиг.7) АФУ 1 имеет приемопередающую 12 и несколько приемных 16а, 16б, 16в антенн, вход-выход передающей и выходы приемных антенн являются входом-выходом и выходами АФУ 1. ППУ 2 содержит генератор 8 зондирующего сигнала, имеющий вход управления частотой, который является входом управления частотой приемопередающего устройства 2, проходной смеситель 14, несколько смесителей 9а, 9б, 9в и полосовых усилителей 10, 10а, 10б, 10в. Выход генератора 8 подключен к вторым входам каждого из смесителей 9а, 9б, 9в и к входу проходного смесителя 14, а выход-вход последнего - к микроволновому выходу-входу ППУ. Первые входы смесителей 9а, 9б, 9в подключены к микроволновым входам ППУ 2, а выходы гомодинного сигнала проходного смесителя 14 и смесителей 9а, 9б, 9в соединены с входами полосовых усилителей 10, 10а, 10б, 10в. Выходы полосовых усилителей 10, 10а, 10б, 10в подключены к выходам ПЧ приемопередающего устройства 2. Количество антенн 12 и 16, смесителей 9, полосовых усилителей 10 и выходов ПЧ равно числу позиций приема.
В пятом варианте устройства частотно-модулированный зондирующий сигнал формируют генератором 8, подают его через проходной смеситель 14 и микроволновый выход-вход на вход-выход АФУ 1 и излучают приемопередающей антенной. Отраженные, принятые антеннами сигналы с входа-выхода и выходов АФУ 1 через микроволновые входы и выход-вход ППУ 2 подают на смесители 14, 9а, 9б, 9в, где смешиваются (перемножаются) с сигналом генератора 8, то есть с излучаемым сигналом. Полученные на выходе смесителей гомодинные сигналы вида (47-48) усиливают в заданной полосе частот полосовыми усилителями 10 10а, 10б, 10в и подают на выходы ПЧ ППУ2.
Программа коррелометра дополняется в четвертом и пятом вариантах структуры системы алгоритмами вычисления суммарных по позициям полных доплеровских сигналов (58, 59), суммарных функций корреляции (61, 62), суммарных коэффициентов корреляции (75-78). Программа процессора вычисляет скорости и дальности объектов по суммарным сигналам, при необходимости программа дополняется алгоритмами вычисления угловых координат объектов (63) (66).
Схема приемопередающего устройства системы первого варианта структуры со схемой компенсации помехи, обусловленной просачиванием излучаемого сигнала в канал приема отраженного сигнала, (см. фиг.8) кроме генератора 8, смесителя 19 полосового усилителя 10 дополнительно содержит электрически управляемые аттенюатор 17 и фазовращатель 18, а также схему управления компенсацией 22 (СУК). Схема управления компенсацией 22 может содержать, например, дифференциальный усилитель нижних частот (ДУНЧ) 20 и усилитель нижних частот (УНЧ) 21. Аттенюатор 17 и фазовращатель 18 микроволновыми входами и выходами включены последовательно между микроволновыми выходом и входом ППУ 1 (то есть между выходом генератора 8 и первым входом смесителя 19), а входами управления подключены к выходам СУК 22. Входы ДУНЧ 20 соединены с вторым и четвертым выводами (сигнал суммы), а вход УНЧ 21 соединен с третьим выводом (сигнал разности) балансного смесителя 19, а выходы соответственно через выходы СУК 22 - к входам управления аттенюатора и фазовращателя. Эквивалентная схема балансного смесителя 19, модифицированного для получения сигналов суммы и разности напряжений смесительных диодов, показана на фиг.9. Трансформатор Тр. совместно с емкостями С1, С2 обеспечивает подачу на диоды D1, D2 напряжения генератора Uг в противофазе, а напряжения принятого сигнала Uc (и помехи Un) - в фазе. Эта схема полностью описывает электрические характеристики любого гибридного соединения диапазона СВЧ. Постоянные составляющие токов диодов D1, D2, протекают соответственно через сопротивления R1, R2, вызывая падения напряжения на них. Между выводами 2 и 4 появляется в результате напряжение, равное сумме падений напряжений на сопротивлениях (сигнал суммы), а между выводами 1 (общий) и 3 - напряжение, равное их разности (сигнал разности). Компенсация сигнала помехи осуществляется следующим образом. Цепочка из аттенюатора 17 и фазовращателя 18 формирует компенсирующий сигнал с частотой излучаемого сигнала. Компенсация наступает, когда амплитуды компенсирующего сигнала и помехи равны, а фазы отличаются на π , то есть противоположны. Это состояние достигается функционированием двух аналоговых систем автоматического регулирования: фазы (АРФ) и амплитуды (АРА) компенсирующего сигнала. Систему АРФ составляют балансный смеситель 19 (датчик рассогласования), УНЧ 21 и фазовращатель 18 (исполнительный элемент). Регулирование выполняется по критерию равенства нулю сигнала разности смесителя 19. Систему АРА составляют балансный смеситель 19 (датчик рассогласования), ДУНЧ 20 и аттенюатор 17 (исполнительный элемент). Регулирование выполняется по критерию равенства заданному уровню сигнала суммы смесителя 19. В процессе работы системы АРФ сигнал разности смесителя 19, определяемый выражением (83), усиливают с помощью УНЧ 21 и подают на вход управления фазовращателя 18, который изменяет фазу компенсирующего сигнала до достижения нулевого уровня сигнала разности. В процессе работы системы АРА сигнал суммы смесителя 19, определяемый выражением (82), усиливают с помощью ДУНЧ 20 и подают на вход управления аттенюатора 17, который изменяет амплитуду компенсирующего сигнала до достижения заданного уровня сигнала суммы. В результате этих процессов достигается устранение помехи на входе балансного смесителя. Описанная схема компенсации может применяться в ППУ четвертого варианта системы, при этом все смесители заменяются на балансные 19, между выходом ППУ 2 и каждым входом ППУ 2 включаются дополнительные последовательно соединенные аттенюаторы 17 и фазовращатели 18, каждый из которых соединен с выходами соответствующих СУК 22, подключенных к выходам балансных смесителей 19. Количество аттенюаторов 17, фазовращателей 18 и СУК 22 равно числу позиций.
В любом из трех первых вариантов структуры может быть реализована возможность измерения и компенсации нелинейности фазочастотной характеристики полосового усилителя. Для этого коррелометр может быть дополнен аналоговым выходом, который через второй вход ППУ 2 соединяется с входом полосового усилителя, и наделен программой формирования на этом выходе тестового сигнала из гармоник модулирующего сигнала, а также вычисления основных и квадратурных коэффициентов корреляции выходного тестового сигнала полосового усилителя 10 и входного тестового сигнала, а также определения из них его фазочастотной характеристики. При необходимости программа формирования опорных сигналов коррелометра может быть дополнена блоком линеаризации измеренной ФЧХ, вычисления разности фаз линеаризованной и измеренной ФЧХ на частотах гармоник и коррекции фаз гармоник опорных сигналов на величину вычисленной разности реальной и линеаризованной ФЧХ полосового усилителя.
Таким образом, варианты предлагаемых способа и системы для радиолокационного измерения скоростей и координат объектов позволяют решить проблемы создания нескольких видов оборудования для обеспечения безопасности дорожного движения: от простейших датчиков препятствий до радаров, определяющих скорости, дальности и угловые координаты объектов дорожного движения. Сочетание гомодинного приемопередатчика с простой частотной модуляцией зондирующего сигнала и корреляционного анализа принятого сигнала позволит в ближайшей перспективе создать ряд недорогих и малогабаритных радаров. Быстрое развитие техники цифровой обработки сигналов позволит в будущем в рамках предложенной технической идеологии решать все более сложные задачи при снижении стоимости систем.
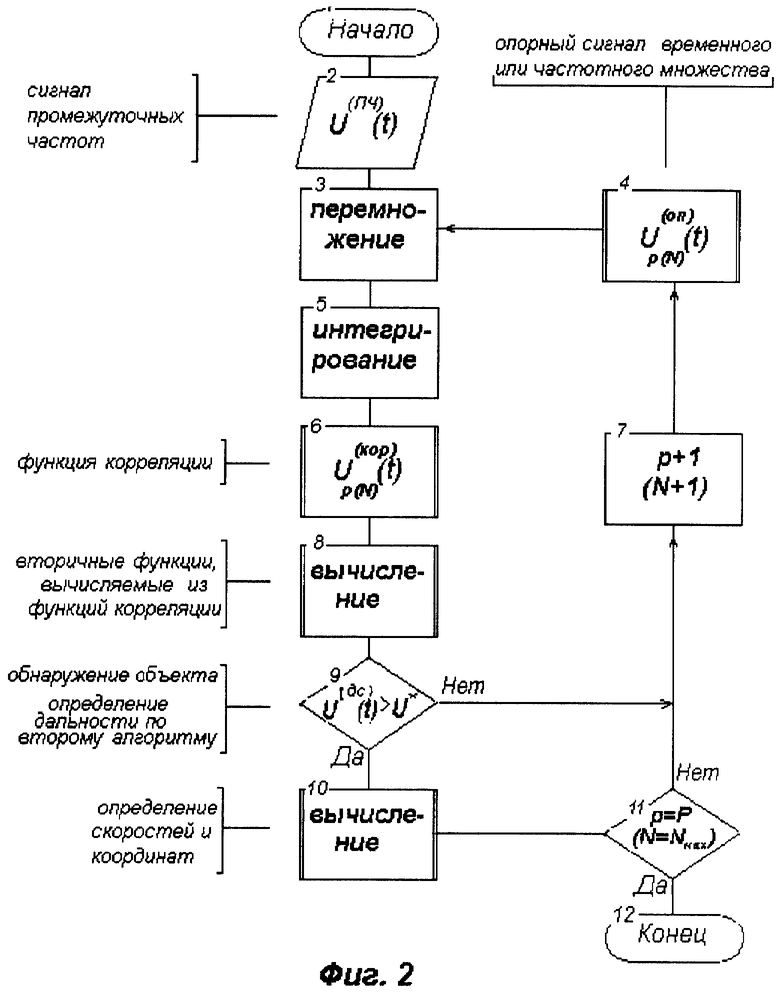
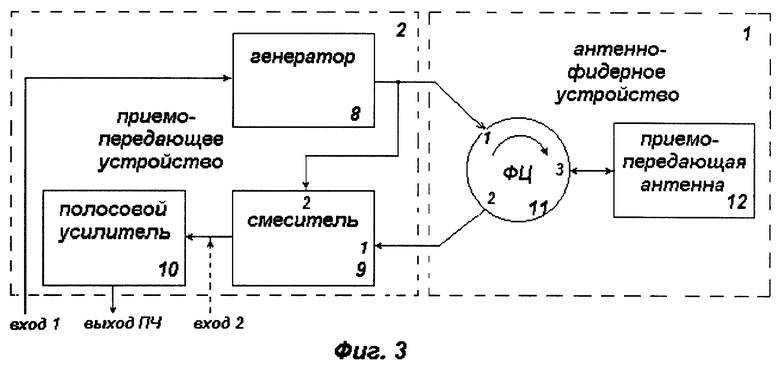
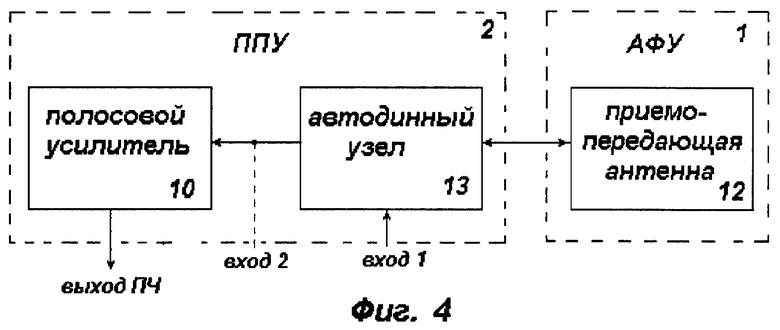
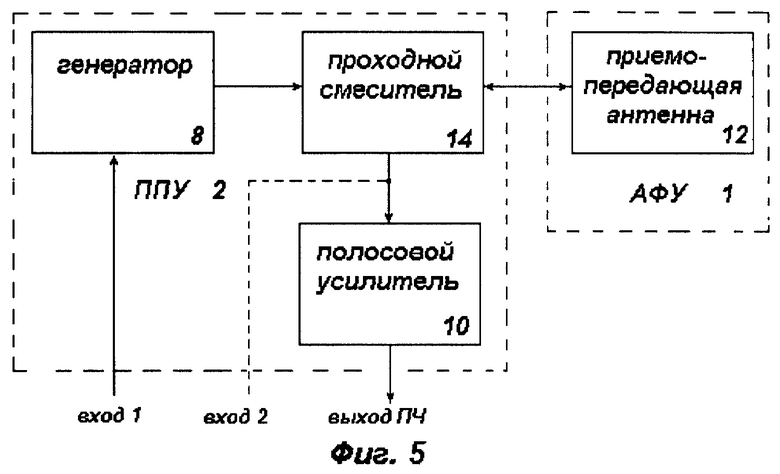
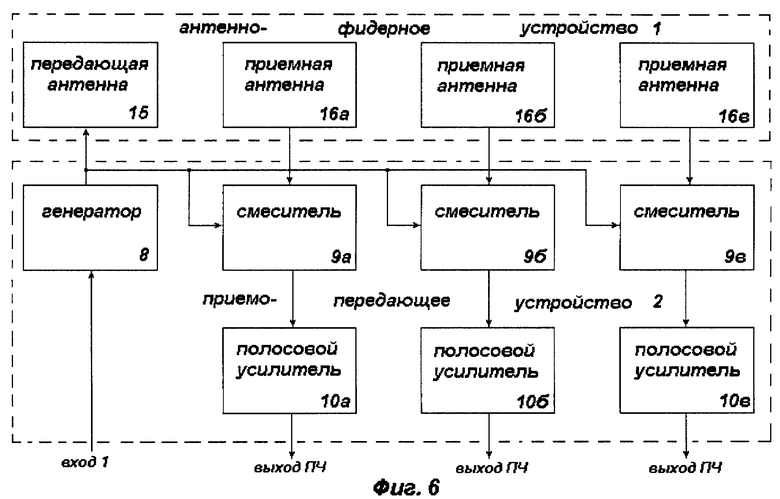
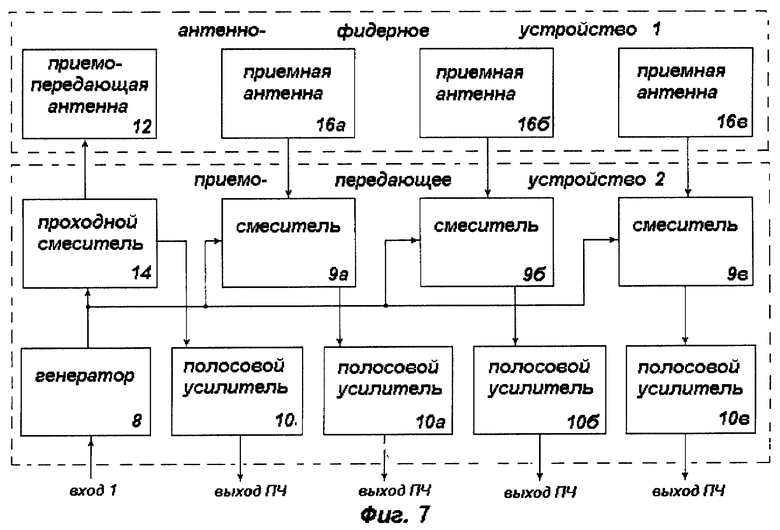
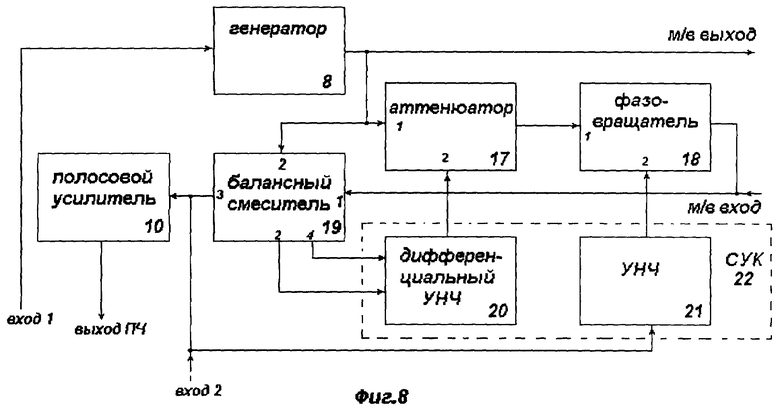
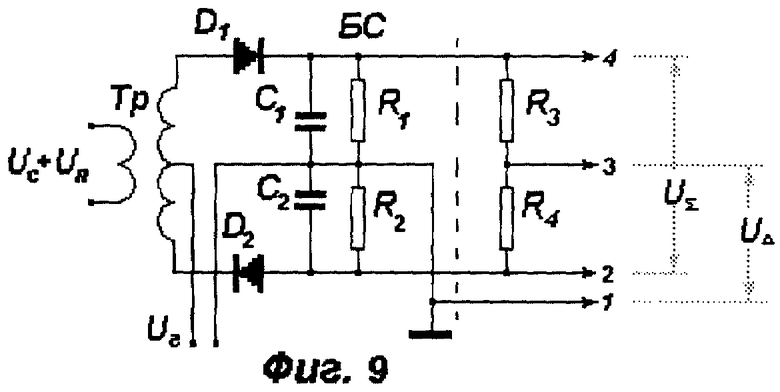
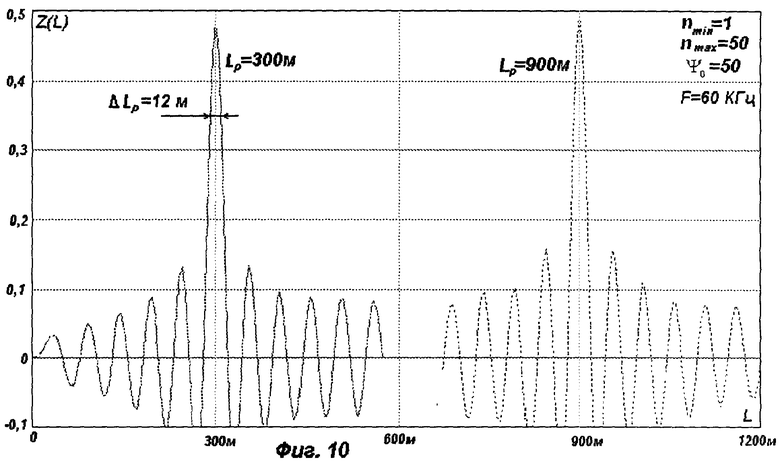
Изобретение относится к области радиоэлектроники, в частности ближней радиолокации, и может быть использовано в системах предотвращения столкновений транспортных средств и контроля движения. Технический результат заключается в обеспечении при минимальной стоимости достаточной для целей безопасности дорожного движения предельной дальности, разрешающей способности и точности измерений и координат объектов. Способ осуществляют путем излучения непрерывного частотно-модулированного зондирующего сигнала, приема отраженного сигнала в одной или нескольких пространственных позициях, перемножения принятого и излучаемого сигналов и вычисления функций корреляции полученного гомодинного сигнала и опорных сигналов, сформированных их гармоник модулирующего сигнала. Скорости объектов вычисляют по доплеровским частотам и фазам периодических составляющих функций корреляции и вторичных, вычисленных из них функций, дальность - либо по характеристике гомодинного сигнала, либо по номеру опорного сигнала во временном множестве, а угловые координаты - по разности фаз отраженных и принятых в разных позициях сигналов. Система содержит антенно-фидерное устройство, гомодинное приемопередающее устройство, коррелометр, формирующий опорные сигналы и вычисляющий функции корреляции и вторичные функции, и процессор, формирующий модулирующий сигнал и вычисляющий скорости и координаты объектов. 6 с. и 15 з.п. ф-лы, 10 ил.
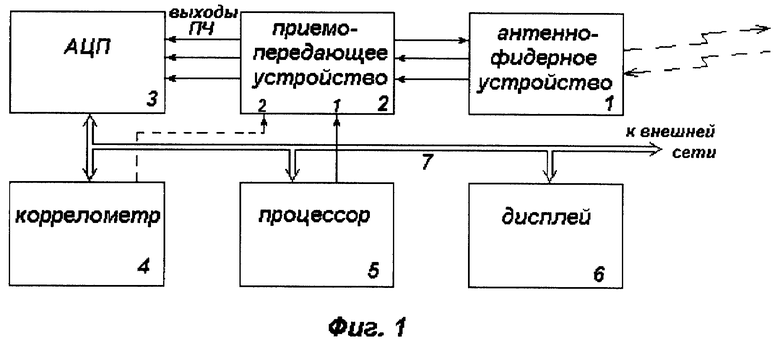
| US 5325097 A, 28.06.1994 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ В ДОПЛЕРОВСКИХ ИЗМЕРИТЕЛЯХ ВЕКТОРА СКОРОСТИ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1992 |
|
RU2018864C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 1998 |
|
RU2158937C2 |
| US 6384769 В1, 07.05.2002 | |||
| US 5600561 А, 04.02.1997 | |||
| US 4656479, 07.04.1987. | |||

