Предлагаемая группа изобретений относится к радиотехнике, а именно к областям радиолокации, радионавигации, и может быть использована в технике радиоизмерений, акустике и оптике.
Известны три основных метода измерения расстояния, использующих измерение времени задержки периодического сигнала, распространяющегося в определенной среде. Импульсный метод определяет расстояние путем прямого измерения времени между передачей короткого импульса и его приемом. Частотный метод использует непрерывный частотно-модулированный, например, по линейному закону сигнал, а время задержки определяется по мгновенной разности частот передаваемого и принятого сигналов.
Фазовый метод (см. И. Е. Кинкулькин и др. "Фазовый метод определения координат", М. , "Советское радио" 1979) определяет расстояние, пройденное сигналом, через измерение разности фаз ϕ передаваемого и принятого сигналов:
где l - измеряемое расстояние,
V - скорость сигнала в среде,
ω - круговая частота сигнала.
Общепризнанно, что наибольшая точность измерения расстояния обеспечивается фазовым методом, который, тем не менее, применяется редко, что обусловлено его основными недостатками:
а) Все известные измерители разности фаз основаны на применении фазового детектора (ФД), имеющего периодическую зависимость выходного напряжения от разности фаз сигналов на входах, например:
Uфд= Uофд•cosϕ, (1)
где Uфд - выходное напряжение ФД,
Uофд - максимальное напряжение ФД,
ϕ - разность фаз сигналов на входах ФД.
Из (1) следует, что полная разность фаз определится как
ϕ = ϕ1+2πn (2)
где ϕ1= arccos(Uфд/Uофд) при 0 < ϕ1< 2π; n = 0, 1, 2, .... - целое число.
Строго говоря, функция arccos(Uфд/Uофд) имеет два значения в интервале 0 < ϕ < 2π, но эта неопределенность легко снимается, если учесть знак производной dUфд/dt, например, применением квадратурного фазового детектора. Таким образом, для однозначного определения расстояния необходимо выполнить условие: (3)
(3)
где lmax - максимальное измеряемое расстояние,
V - скорость распространения колебания в среде,
ω - круговая частота сигнала.
Выполнение условия (3) за счет уменьшения частоты приводит к снижению точности измерения. В большинстве реальных задач значения неизвестной "n" могут составлять сотни и тысячи. Определение значения n стало основной проблемой фазового метода.
б) Точное измерение разности фаз колебаний в интервале  является достаточно сложной задачей, не имеющей стандартных технических решений.
является достаточно сложной задачей, не имеющей стандартных технических решений.
в) Фазовый метод считается "однообъектным", т.е. позволяющим проводить локацию только одного объекта. Составляющая принимаемого сигнала, вызванная отражением от другого объекта, накладывается на полезный сигнал, изменяет его фазу, искажая тем самым результат измерения, и не выделяется очевидными методами.
По изложенным причинам фазовый метод измерения расстояния применяется редко, либо в сложных многочастотных радионавигационных системах, либо в комбинации с другими методами.
Примером такой комбинации и аналогом настоящего изобретения является патент США 4503433 "Измерение дальности цели в радиолокаторе с частотно-модулированным непрерывным сигналом", G 01 S 13/34, 13/26, публ. 1985 г. В этом изобретении грубое измерение расстояния производится частотным методом с использованием линейной частотной модуляции сигнала генератора. Точное значение расстояния определяется фазовым методом по формуле (2), причем значение параметра n вычислялся из результата грубого измерения. Это устройство позволяет повысить точность измерения относительно устройств, использующих классический частотный метод, но не реализует потенциальные возможности фазового метода, обладая следующими недостатками:
- определение точного значения n требует высокой линейности ЛЧМ сигнала, точного определения девиации частоты и коротких промежутков времени,
- высокая точность измерения главного значения начальной разности фаз в этом устройстве не может быть реализована.
Общим недостатком подобных комбинированных устройств является наличие в одном приборе технических средств двух и более способов, что усложняет его и увеличивает стоимость.
Ближайшим аналогом настоящего изобретения является "Способ и система для измерения небольших расстояний" (см. патент США 4829305, G 01 S 13/08, публ. 1989 г). Предлагаемый способ состоит в том, что частота излучаемого сигнала регулируется до достижения заданной разности фаз принятого и излученного сигналов. Проблема неоднозначности измерения снимается тем что используется только главное значение разности фаз, т.е. n = 0. Для повышения точности измерения предлагается установку разности фаз проводить сравнением принятого сигнала с гармоникой излучаемого сигнала. Расстояние вычисляется из значения определенной измерителем частоты генератора по формуле (3). Структурная схема устройства для реализации метода показана на фиг. 1. Устройство содержит генератор 1 с частотой, управляемой напряжением, сигнал субгармоники которого с выхода делителя частоты 2 передается излучателем 3 в сторону измеряемого объекта и в режиме грубого измерения подается на опорный вход средства сравнения фаз 5 (фазового детектора), на второй вход которого поступает сигнал, отраженный от объекта через приемник 4. Выходное напряжение фазового детектора, являясь критерием при установке определенного значения разности фаз передаваемого и принятого сигналов, поступает через фильтр 6 на вход управления частотой генератора 1. Система представляет собой кольцо автоматической подстройки частоты (АПЧ) генератора на частоту дискриминатора, которая определяется временем распространения сигнала до объекта и обратно. Для повышения точности предусмотрен режим, при котором на опорный вход фазового детектора подается гармоника передаваемого сигнала, т.е. сигнал генератора 1. Значение установившейся частоты определяется измерителем частоты 7, а соединенное с ним вычислительное средство 8 вычисляет расстояние и отображает результат на дисплее 9. Основной недостаток способа и системы: неоднозначность результата измерения, т.е. отсутствие возможности определения параметра n, что и предопределяет использование ее только на небольших расстояниях, т. е. при n = 0. Система не способна отделить полезный отраженный сигнал от паразитных отражений, что ограничивает точность измерения расстояния.
Настоящее предложение направлено на решение задачи реализации потенциально высокой точности фазового метода измерения расстояния при упрощении и, следовательно, удешевлении технических средств измерения, а также достижения возможности одновременного определения расстояния до двух и более объектов.
Поставленная задача решается тем, что согласно изобретению в способе измерения расстояния путем измерения разности фаз излучаемого с частотой f и принятого периодического сигналов, состоящем в том, что изменением частоты излучаемого сигнала f устанавливают заданную разность фаз ϕ , a ϕ
, a ϕ из крутизны которой определяют расстояние (l), пройденное энергетически большей частью сигнала по основной траектории, и периодические составляющие, из параметров которых вычисляют разности расстояний, пройденные сигналом по основной и другим траекториям, причем для определения абсолютных координат объекта или объектов на пути излучаемого сигнала устанавливают репер (например, отражатель), абсолютные координаты которого известны, принимают возвращенный им сигнал и вычисляют по фазочастотной характеристике расстояния между объектами и репером, а устройство для осуществления способа измерения расстояния, содержащее генератор с частотой, управляемой напряжением, подключенный к выходу устройства, средство сравнения фаз (фазовый детектор), первый вход которого подключен к выходу генератора, а второй - к входу устройства, измеритель частоты, подключенный к выходу генератора и вычислительное средство, подключенное к измерителю частоты и определяющее расстояние, дополнительно содержит многофункциональное программируемое управляющее средство (контроллер), с которым соединены шиной приема и передачи информации измеритель частоты и вычислительное средство; аналоговый вход контроллера соединен с выходом фазового детектора, а аналоговый выход - с входом управления частотой генератора, причем контроллер и вычислительное средство наделены программой, обеспечивающей реализацию алгоритма измерения фазочастотной характеристики и вычисления расстояний с использованием, например, операций подключения и отключения входа генератора к выходу фазового детектора, изменения начальной частоты генератора, изменения знака коэффициента передачи сигнала с выхода фазового детектора на вход генератора, а также изменения величины сдвига фазы фазовращателя, включенного либо между выходом генератора и фазовым детектором, либо между входом устройства и фазовым детектором, а дополнительно устройство может содержать линию задержки, включенную между генератором и фазовым детектором, а также включенные в передающий канал между управляемым генератором и выходом устройства и в приемный канал между входом устройства и фазовым детектором соединенные с командными выходами контроллера ключевые устройства.
из крутизны которой определяют расстояние (l), пройденное энергетически большей частью сигнала по основной траектории, и периодические составляющие, из параметров которых вычисляют разности расстояний, пройденные сигналом по основной и другим траекториям, причем для определения абсолютных координат объекта или объектов на пути излучаемого сигнала устанавливают репер (например, отражатель), абсолютные координаты которого известны, принимают возвращенный им сигнал и вычисляют по фазочастотной характеристике расстояния между объектами и репером, а устройство для осуществления способа измерения расстояния, содержащее генератор с частотой, управляемой напряжением, подключенный к выходу устройства, средство сравнения фаз (фазовый детектор), первый вход которого подключен к выходу генератора, а второй - к входу устройства, измеритель частоты, подключенный к выходу генератора и вычислительное средство, подключенное к измерителю частоты и определяющее расстояние, дополнительно содержит многофункциональное программируемое управляющее средство (контроллер), с которым соединены шиной приема и передачи информации измеритель частоты и вычислительное средство; аналоговый вход контроллера соединен с выходом фазового детектора, а аналоговый выход - с входом управления частотой генератора, причем контроллер и вычислительное средство наделены программой, обеспечивающей реализацию алгоритма измерения фазочастотной характеристики и вычисления расстояний с использованием, например, операций подключения и отключения входа генератора к выходу фазового детектора, изменения начальной частоты генератора, изменения знака коэффициента передачи сигнала с выхода фазового детектора на вход генератора, а также изменения величины сдвига фазы фазовращателя, включенного либо между выходом генератора и фазовым детектором, либо между входом устройства и фазовым детектором, а дополнительно устройство может содержать линию задержки, включенную между генератором и фазовым детектором, а также включенные в передающий канал между управляемым генератором и выходом устройства и в приемный канал между входом устройства и фазовым детектором соединенные с командными выходами контроллера ключевые устройства.
К настоящему описанию приложены пять фигур чертежей и два текстовых материала.
На фиг. 1 изображена структурная схема устройства-прототипа.
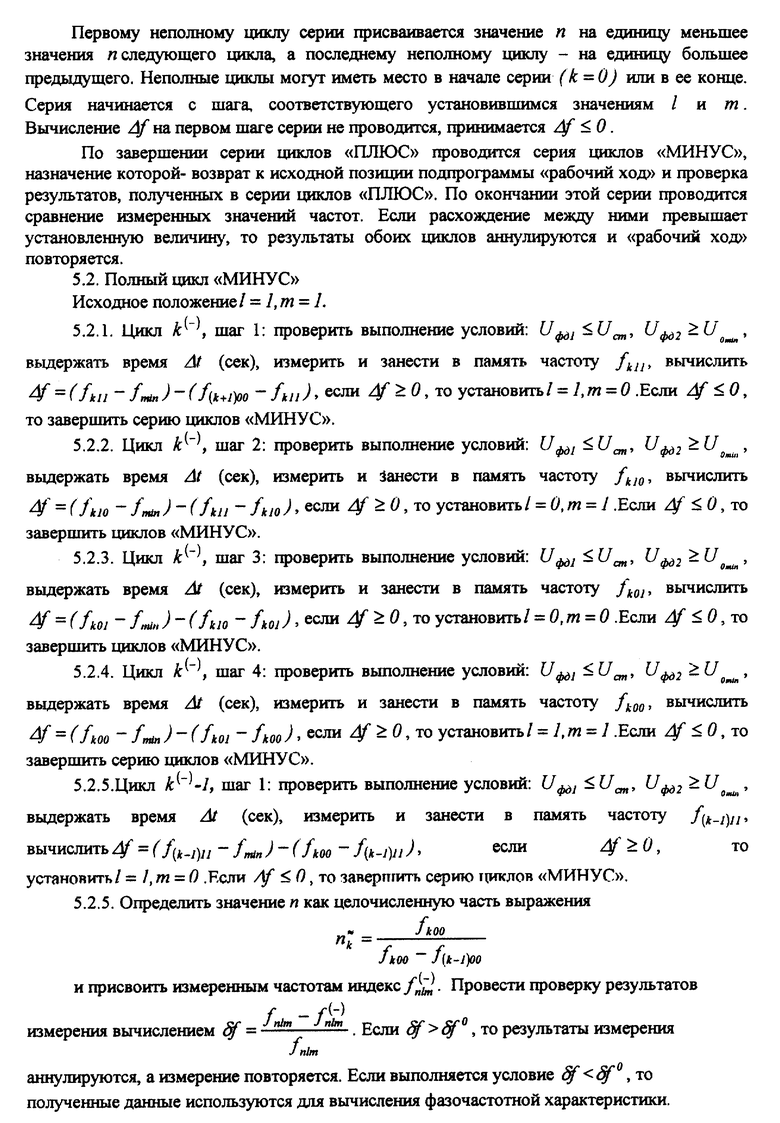
На фиг. 2 изображена структурная схема предлагаемого устройства.
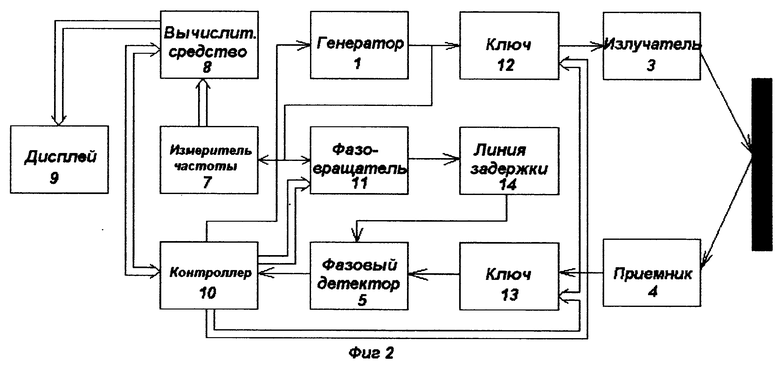
На фиг. 3 показана структурная схема измерителя уровня нефтепродуктов в резервуаре, построенного на принципах изобретения.
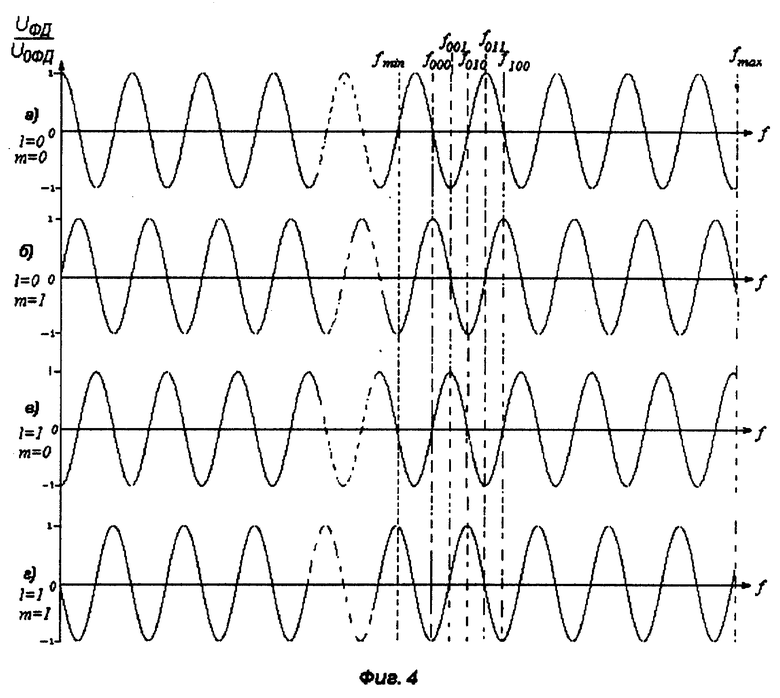
На фиг. 4 показаны характеристики многочастотного дискриминатора, иллюстрирующие один из алгоритмов измерения фазочастотной характеристики.
На фиг. 5 показаны временные диаграммы, иллюстрирующие работу предложенного устройства в непрерывном и квазинепрерывном режиме.
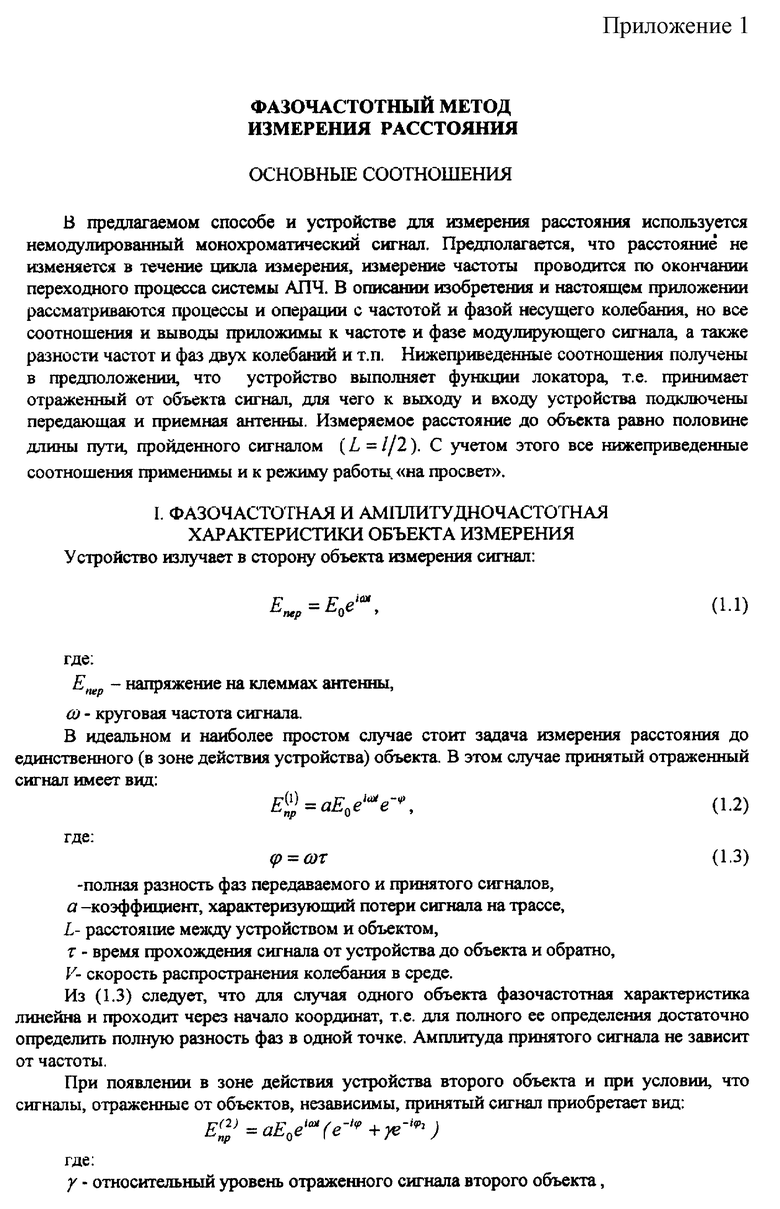
В приложении 1 "Фазочастотный метод измерения расстояния" приведен вывод основных теоретических соотношений, обосновывающих предложенный способ.
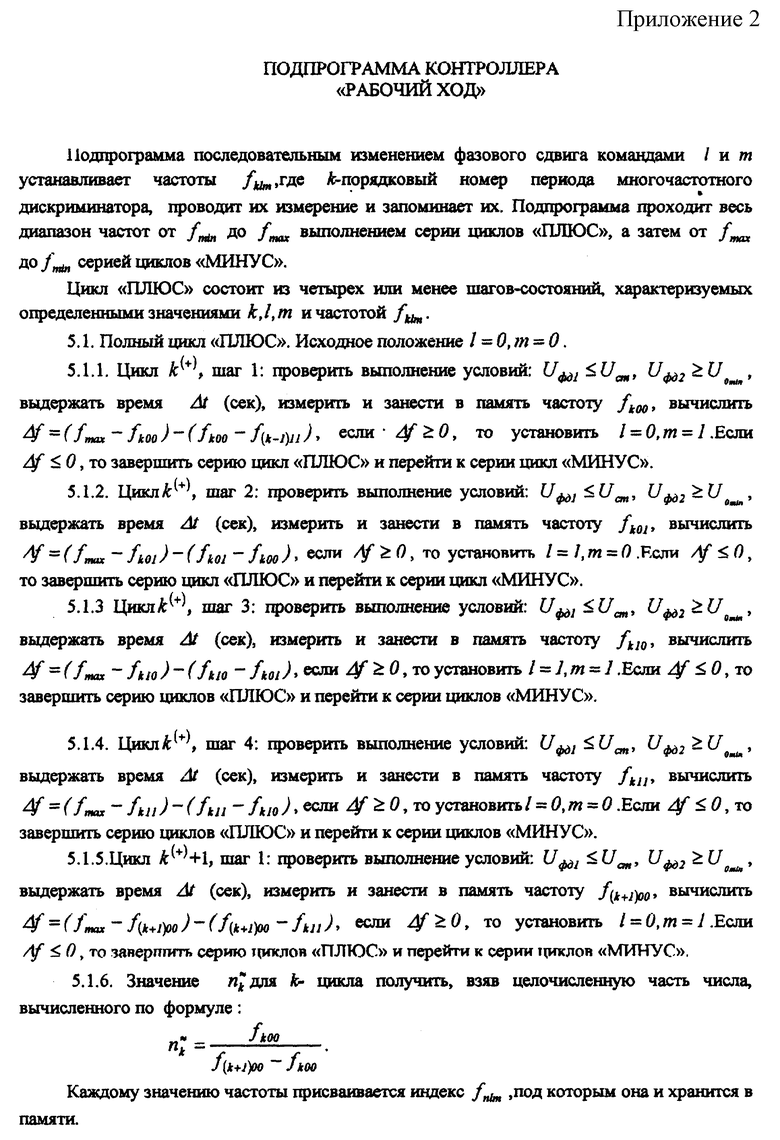
В приложении 2 приведен алгоритм основной подпрограммы контроллера устройства для измерения расстояния.
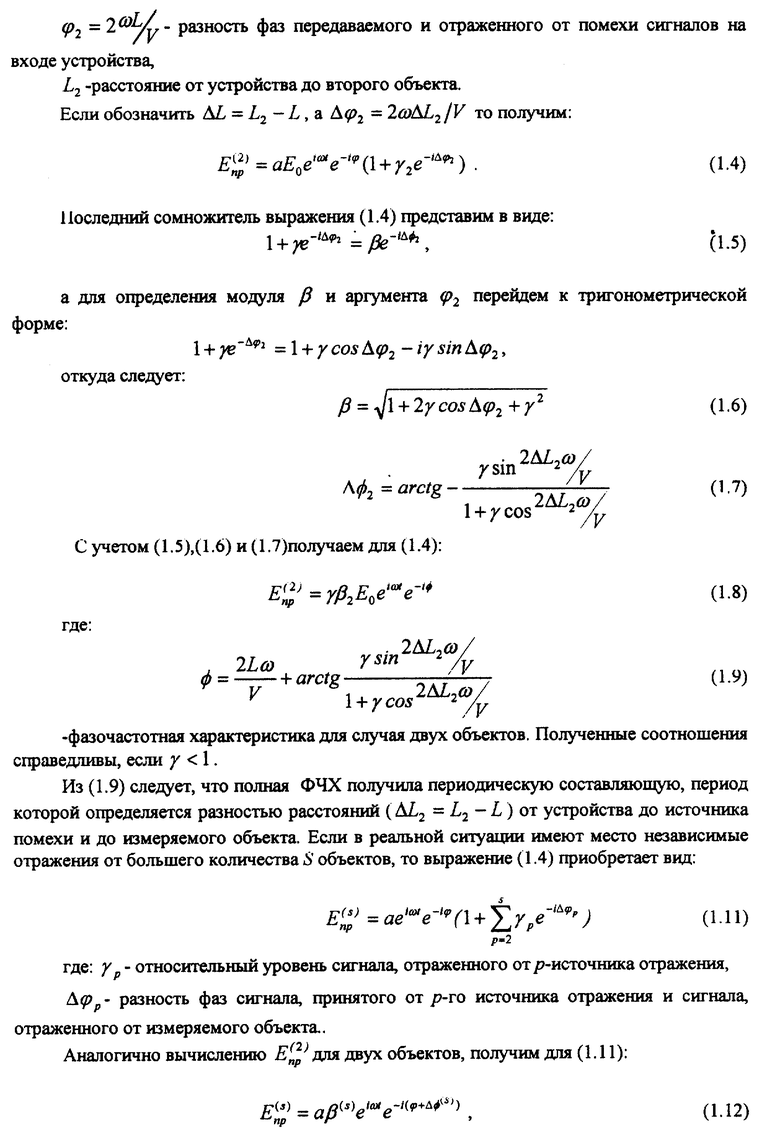
В отличие от способа-прототипа, определяющего расстояние по одному значению разности фаз излучаемого и принятого сигналов на одной из частот, основой настоящего изобретения является точное измерение в определенном диапазоне частот полной фазочастотной характеристики (ФЧХ) объекта, крутизна линейной составляющей которой равна времени задержки сигнала и, следовательно, однозначно определяет расстояние от устройства до основного объекта, т. е. длину траектории, которую прошла энергетически большая часть сигнала. Периодическая составляющая ФЧХ несет информацию о протяженности других траекторий, в частности о разностях расстояния до основного объекта и расстояний до других объектов, находящихся в зоне действия устройства. Для получения ФЧХ в предлагаемом способе после измерения частоты f0, установившейся по достижении заданного значения разности фаз излучаемого и принятого сигналов ϕ Как показано в "Приложении 1" к настоящему описанию, полученные данные позволяют вычислить ФЧХ по формуле: φi= 2πn+ϕ
Как показано в "Приложении 1" к настоящему описанию, полученные данные позволяют вычислить ФЧХ по формуле: φi= 2πn+ϕ а ϕ
а ϕ из крутизны которой определяют расстояние l, пройденное энергетически большей частью сигнала, и периодические составляющие, позволяющие вычислить расстояния, пройденные сигналом по другим траекториям.
из крутизны которой определяют расстояние l, пройденное энергетически большей частью сигнала, и периодические составляющие, позволяющие вычислить расстояния, пройденные сигналом по другим траекториям.
Структурная схема устройства для осуществления предлагаемого способа показана на фиг. 2. Как и ближайший прототип, устройство содержит генератор 1 с частотой, управляемой напряжением (ГУН), передающий сигнал через излучатель 3 на объект, и фазовый детектор 2, на опорный вход которого поступает сигнал генератора 1, а на второй вход - сигнал от объекта через приемник 4. Выходной сигнал фазового детектора (ФД) используется для подстройки частоты генератора 1, измеритель частоты 7 определяет установившееся значение частоты генератора 1 и передает эту информацию на вычислительное средство 8, которое определяет расстояние и отображает эту информацию на дисплее 9. В отличие от прототипа предлагаемое устройство содержит многофункциональное программируемое управляющее средство (контроллер) 10, которое соединено шинами обмена цифровой информацией с измерителем частоты 7 и вычислительным средством 8. Вход аналогового сигнала контроллера 10 подключен к выходу ФД 5, а выход - к входу управления частотой ГУН 1. Конструкцией контроллера предусматривается наличие технических средств для реализации алгоритма измерения ФЧХ, например возможности в соответствии с программой подключения и отключения входа генератора 1 от фазового детектора 2, установки заданной частоты ГУН 1 путем изменения напряжения на его входе, изменения на противоположный (инверсии) знака коэффициента передачи выходного сигнала ФД 5 на вход ГУН 1. Контроллер и вычислительное средство наделены программами, обеспечивающими реализацию алгоритмов измерения ФЧХ и вычисления расстояний.
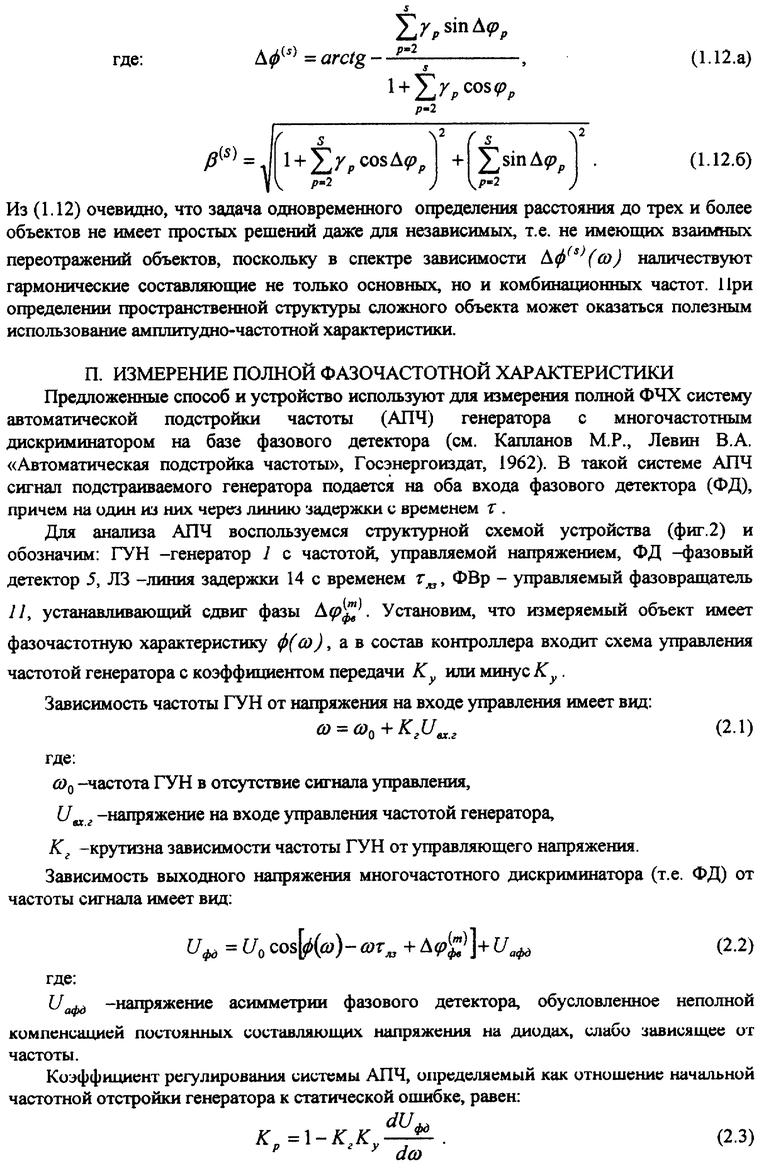
Для измерения ряда частот fi используются свойства многочастотного дискриминатора, представляющего собой соединение фазового детектора и линии задержки (см. Капланов М.Р., Левин В.А., "Автоматическая подстройка частоты", Москва, Госэнергоиздат, 1962 г). Характеристика такого дискриминатора имеет вид косинусоиды, вследствие чего система АПЧ, его использующая, имеет множество значений частот устойчивости, частотный интервал между которыми соответствует разности фаз сигналов на входах ФД 2π и в предлагаемом устройстве равен Δfi= fi-f(1-2) = V/l. Используемые в изобретении технические средства предоставляют возможности для многих вариантов алгоритма измерения ряда fi.
Например, отключают АПЧ, определяют частотную характеристику дискриминатора, для чего изменяют дискретно напряжение на входе ГУН, измеряя одновременно частоту ГУН и выходное напряжение ФД, определяют и запоминают приближенные значения частот fi, соответствующие точкам нулевого выходного напряжения ФД и отрицательной производной dUфд/df (нечетные значения i), устанавливают обеспечивающий устойчивость АПЧ в этих точках знак коэффициента передачи цепи обратной связи, устанавливают частоту ГУН вблизи fi, включают АПЧ, измеряют и запоминают точное значение f1, отключают АПЧ, устанавливают частоту ГУН вблизи f3, включают АПЧ, измеряют и запоминают точное значение частоты f3 и т. д. Этот процесс многократно воспроизводится для всех нечетных значений i в заданном диапазоне частот. Для повышения точности измерения расстояния процесс повторяют и измеряют множество частот fi для нечетных значений i, установив противоположный знак коэффициента передачи цепи обратной связи. Из ряда значений fi вычисляют фазочастотную характеристику по формуле φi= 2πn+ϕ - главное значение начальной разности фаз, соответствующей нулевому напряжению на выходе ФД, а α - поправка на погрешности измерения (асимметрия ФД, статическая ошибка АПЧ и т.п.), алгоритмы вычисления которой приведены в "Приложении 1".
- главное значение начальной разности фаз, соответствующей нулевому напряжению на выходе ФД, а α - поправка на погрешности измерения (асимметрия ФД, статическая ошибка АПЧ и т.п.), алгоритмы вычисления которой приведены в "Приложении 1".
Полная ФЧХ есть сумма трех составляющих: линейной φ(лин) = 2πfl/V определяемой энергетически большей частью принятого сигнала, периодической φ(~), несущей информацию о расстоянии, пройденном частями сигнала по другим траекториям, и апериодической φ(an), обусловленной наличием иных факторов, в т. ч. погрешностей измерения ФЧХ. Анализ с целью выделения представляющих интерес линейной и периодической составляющих, а также определение спектра периодической составляющей с целью определения протяженности вторичных траекторий есть задача математическая, для решения которой применим широкий спектр методов от простого усреднения до корреляционного анализа и решения систем трансцендентных уравнений.
Начальным пунктом отсчета измеренного расстояния обычно является устройство для измерения расстояния, что не всегда приемлемо, поскольку эта точка начала отсчета геометрически не привязана к абсолютным координатам. Предлагаемые способ и устройство решают эту проблему установкой репера, абсолютные координаты которого известны. Репер отражает или возвращает часть излучаемого сигнала на вход устройства, предоставляя возможность определить расстояния между объектами и репером, установив тем самым абсолютные координаты объектов. Как показано в "приложении 1", полученные соотношения справедливы, если существует основная траектория сигнала, по которой проходит преобладающая часть мощности принятого сигнала. Если в реальном случае такая траектория отсутствует, она может быть создана искусственно установкой репера.
В состав устройства между выходом генератора и опорным входом фазового детектора или между входом устройства и сигнальным входом ФД может быть включен управляемый фазовращатель 11, вход управления которого подключен к контроллеру. Использование фазовращателя расширяет возможности устройства, в частности:
1. позволяет уменьшить дискрет изменения фазы и частоты и повысить тем самым точность измерения ФЧХ,
2. позволяет реализовать алгоритм измерения ФЧХ, не требующий отключения АПЧ при изменении задаваемой разности фаз,
3. позволяет реализовать простейший вариант устройства с использованием двух частот и минимальной продолжительностью измерения.
Включение линии задержки 14 между генератором и опорным входом фазового детектора, время задержки которой равно времени прохождения сигнала от генератора до близкого источника паразитного отражения и обратно до фазового детектора, позволяет существенно снизить погрешность измерения, обусловленную этим отражением, но увеличивает дискрет частоты, "приближая" объект к устройству.
Введение в устройство для измерения расстояния ключевых элементов 12 и 13, управляемых контроллером, между генератором и выходом устройства, а также между входом устройства и фазовым детектором позволяет повысить точность измерения за счет исключения приема отражений от мешающих объектов.
Примером одной из многих возможных реализаций изобретения является радиолокационный измеритель уровня нефтепродуктов в резервуаре. Структурная схема этого устройства показана на фиг. 3.
Выход генератора (ГУН) сверхвысокой частоты 1 соединен с направленным ответвителем 15, разделяющим сигнал генератора 1 на три канала. С основным выходом ответвителя 15 соединены последовательно ключевой элемент 12 и ферриттовый циркулятор 17, подключенный к антенне 18. Антенна 18 установлена в горловине 19 резервуара 21. К второму выходу направленного ответвителя 15 подключены последовательно линия задержки 14, управляемый фазовращатель 11 и опорный вход фазового детектора 5 (ФД). К третьему выходу ответвителя 15 подключен измеритель частоты 7. К третьему плечу циркулятора подключены последовательно ключевой элемент 13, усилитель 16 с системой автоматической регулировки усиления (АРУ) и сигнальный вход фазового детектора 5. Входы контроллера 10, имеющего в своем составе вычислительное средство 8, соединены с выходом фазового детектора 5 и выходом измерителя частоты 7. Выходы команд управления контроллера 10 соединены с ключевыми элементами 12 и 13, фазовращателем 11, схемой управления частотой 23 и входом управления частотой генератора 1. Результаты измерения выводятся с выхода 24 контроллера 10 и отображаются на дисплее 9. В резервуаре между антенной 18 и поверхностью измеряемого продукта 22 установлен реперный отражатель 20 на расстоянии Hp от дна резервуара.
Генератор 1, направленный ответвитель 15, ключевой элемент 12, ферритовый циркулятор 17, антенна 18, реперный отражатель 20 и поверхность продукта 22 образуют тракт излучаемого сигнала.
Поверхность продукта 22, антенна 18, циркулятор 17, ключевой элемент 13, усилитель 16 и фазовый детектор 5 образуют тракт отраженного сигнала.
Генератор 1, направленный ответвитель 15, линия задержки 14, управляемый фазовращатель 11 и фазовый детектор 5 образуют тракт опорного сигнала.
Контроллер 10 с вычислительным средством 9 и схема управления частотой 23 вместе с управляемым генератором 1, фазовращателем 11 и ключевыми элементами 12 и 13 составляют комплекс управления и обработки информации.
В качестве генератора может быть использован транзисторный автогенератор или генератор на диоде Ганна, частота генератора управляется путем изменения напряжения на варакторном диоде. Фазовый детектор 5 (см. А.А. Шахгильдян, В. В. Ляховкин "Фазовая автоподстройка частоты" Изд. Связь, 1966 г.) представляет собой смеситель диапазона СВЧ, имеющий нулевую промежуточную частоту. В качестве измерителя частоты 7 может быть применена комбинация цифровых делителей частоты и счетчика импульсов. Линия задержки 14 представляет собой отрезок линии передачи СВЧ (коаксиальный кабель, полосковая линия и т.п.), время задержки которой равно времени прохождения сигнала, отраженного от антенны, от ответвителя 15 до сигнального входа фазового детектора 5 по тракту: ключ 12, циркулятор 17, антенна 18, циркулятор 17, ключ 13, усилитель 16. Управляемый фазовращатель 11 представляет собой схему СВЧ из двух переключателей и фазосдвигающей цепи, включаемой в тракт при заданном положении переключателей. Фазовращатель имеет два состояния - Δϕ
При работе устройства сигнал генератора 1 через ответвитель 2, открытый ключ 12 и циркулятор 17 поступает на антенну 18 и излучается ею в направлении поверхности продукта 22. Отраженный сигнал принимается антенной 18 и через циркулятор 17, открытый ключ 13 и усилитель 16 поступает на сигнальный вход фазового детектора 5. На второй вход фазового детектора 5 подается опорный сигнал, поступающий от генератора 1 через ответвитель 15, линию задержки 17 и управляемый фазовращатель 11. Выходной сигнал фазового детектора 5 поступает на вход схемы управления 23, где усиливается и интегрируется. Полученное на выходе схемы управления 23 напряжение подается на вход управления частотой генератора 1. Фазовый детектор с линией задержки, роль которой играет тракт сигнала от ответвителя 15 до поверхности 22 и обратно до фазового детектора 5, представляет собой многочастотный дискриминатор, характеристика которого имеет вид  (см. фиг. 4а), где L - расстояние между устройством и поверхностью продукта, причем частотный интервал между соседними переходными частотами с одинаковым знаком производной dUфд/df однозначно определяется расстоянием до измеряемого объекта и равен: fk - fk-1 = c/2L. Генератор и многочастотный дискриминатор образуют систему АПЧ, устанавливающую частоту генератора на одну из переходных частот. Установившееся значение частоты обозначается fklm, где k - порядковый номер периода характеристики дискриминатора. По команде контроллера АПЧ может отключаться, а частота генератора 1 управляться контроллером.
(см. фиг. 4а), где L - расстояние между устройством и поверхностью продукта, причем частотный интервал между соседними переходными частотами с одинаковым знаком производной dUфд/df однозначно определяется расстоянием до измеряемого объекта и равен: fk - fk-1 = c/2L. Генератор и многочастотный дискриминатор образуют систему АПЧ, устанавливающую частоту генератора на одну из переходных частот. Установившееся значение частоты обозначается fklm, где k - порядковый номер периода характеристики дискриминатора. По команде контроллера АПЧ может отключаться, а частота генератора 1 управляться контроллером.
Устройство может работать в двух режимах: непрерывного (H) и квази-непрерывного импульсного (КНИ) излучения в зависимости от расстояния Lx между репером и уровнем продукта. При малых уровнях продукта Hx, т.е. относительно слабом принимаемом сигнале, используется режим КНИ, при увеличении уровня продукта мощность принимаемого сигнала возрастает, но уменьшается Lx. При определенном значении Lx устройство переходит в режим H. В режиме H ключевые элементы 12 и 13 постоянно находятся в состоянии "открыто". Временные эпюры режима КНИ показаны на фиг. 5. Ключ 12 проводит импульсную модуляцию передаваемого сигнала с небольшой скважностью (например, 3-10), длительностью импульса tu и периодом повторения Tu (фиг. 5 а). Ключ 13 открывает приемный канал либо на время прихода импульса отражения от репера 20 (фиг. 5 б), либо на время прихода импульса отражения от поверхности продукта 22 (фиг. 5 в). На выходе фазового детектора в режиме КНИ имеет место импульсный видеосигнал, амплитуда которого определяется разностью фаз сигналов на его входах. Если частота импульсной модуляции много больше граничной частоты фильтра нижних частот на выходе фазового детектора, то импульсная составляющая подавляется фильтром и выходной сигнал фазового детектора становится непрерывным, как и в режиме H.
Программа измерения имеет следующие основные подпрограммы:
1) Подготовка к работе.
2) Рабочий ход.
3) Вычисление ФЧХ.
4) Анализ ФЧХ, вычисление уровня Hx.
Целью подпрограммы "Подготовка к работе" является проведение контроллером проверки работоспособности узлов и систем устройства, измерение характеристики многочастотного дискриминатора и приближенное определение уровня продукта, выбор вида излучаемого сигнала (режим H или КНИ). Получив подтверждение работоспособности узлов и систем устройства и отключив АПЧ, подпрограмма проводит измерение характеристики многочастотного дискриминатора, выполняя:
- установку частоты генератора 1 на нижнюю границу рабочего диапазона частот, одновременное измерение частоты и выходного напряжения фазового детектора, запоминание этих величин,
- увеличение частоты генератора изменением убавляющего напряжения на величину Δf ≪ fk-fk-1, повторное одновременное измерение частоты и выходного напряжения фазового детектора, запоминание их,
- многократное воспроизведение этой операции до достижения верхней границы рабочего диапазона частот.
Подпрограмма проводит из полученных данных выборку двух рядов приближенных значений частот перехода fkl, удовлетворяющих условию U ≈ 0 для отрицательной (fk0) и положительной (fk1) крутизны dUфд/df, и определяет приближенное значение расстояния до поверхности продукта по формуле:
Сравнивая L≈ с заданным значением L0, подпрограмма осуществляет выбор вида излучаемого сигнала: квазинепрерывный импульсный (КНИ), если L≈ > L0 и непрерывный (H), если L≈ < L0. Затем подпрограмма, установив минимальную в рабочем диапазоне частоту перехода f000 или f010 и знак коэффициента передачи схемы управления, обеспечивающий устойчивость АПЧ в этой точке, подключает выход схемы управления 23 к входу генератора 1 (включение АПЧ). В результате выполнения этой операции выходной сигнал фазового детектора 5, усиленный схемой управления частотой 23, начинает поступать на вход управления частотой генератора 1, обеспечивая тем самым функционирование схемы частотной автоподстройки частоты с многочастотным дискриминатором. АПЧ устанавливает частоту генератора f000 либо f010, выводя устройство на исходную позицию подпрограммы "Рабочий ход".
Подпрограмма "Рабочий ход" обеспечивает измерение ряда частот fklm, соответствующих ряду значений разностей фаз принимаемого и передаваемого сигналов φ = 2πk+lπ+m π/2+π/2 заданном диапазоне частот fmin-fmax. Алгоритм подпрограммы не зависит от вида излучения (H или КНИ). На фиг. 4 показаны изменения характеристики многочастотного дискриминатора в процессе измерения. Перед началом измерения при m=0 частота генератора 1 устанавливается контроллером в область минимальной переходной частоты в рабочем диапазоне, при этом подается команда l=0 (или l=1), обеспечивающая устойчивость АПЧ в этой точке, и включается АПЧ (фиг. 4а). После завершения переходного процесса измеритель частоты 7 определяет точное значение частоты f000 (или f010) и заносит его в память контроллера. Далее контроллер командой m=1 сдвигает характеристику фазового детектора на π/2, что приводит к нарушению равновесия АПЧ, появлению сигнала ошибки и восстановлению равновесия при частоте f001, которая измеряется и запоминается (фиг. 4б). Далее измеряется частота f010 при l=1, m=0 (фиг. 4в) и частота f011 при l=1, m=1 (фиг. 4г). Существенно, что любое из проведенных приращений фазы не выводит АПЧ за пределы зоны локальной устойчивости. В следующем цикле, который начинается измерением частоты f100 при l=0, m=0, все операции повторяются. Измерения проводятся, пока выполняется условие: fklm < fmax. Алгоритм подпрограммы "рабочий ход" приведен в "приложении 2".
Подпрограмма "Вычисление ФЧХ" устанавливает точные значения разности фаз, соответствующие измеренным частотам, определяя значение n, вводя поправку на асимметрию фазового детектора и используя точное значение сдвига фазы фазовращателем 11. Вычисление проводится по формуле: (6)
(6)
где: n - целое число, получаемое округлением n*, определяемой как (7)
(7)
Значения величин αklm,Δϕ (8)
(8) (9)
(9) (10)
(10)
В режиме КНИ подпрограммы "Рабочий ход" и "Вычисление ФЧХ" выполняются: дважды для измерения расстояния до репера и до поверхности продукта. Подпрограмма "Анализ ФЧХ-КНИ" имеет один программный модуль, применимый и в режиме H, "Линеаризация ФЧХ", т.е. аппроксимация ее выражением вида:
φ(лин) = 2πfτ.
Определение τ проводится, например, решением уравнения: (11)
(11)
где Δf
В режиме КНИ определение τp репера и τn поверхности однозначно определяет измеряемую величину - расстояние от репера до поверхности продукта:
Lx= L-Lp= c(τn-τp).
Подпрограмма "Анализ ФЧХ-Н" выполняет модуль "линеаризация ФЧХ", определяет τn и выделяет периодическую составляющую ФЧХ как разность
φ = φklm-2πfklmτн. (12)
Далее, используя интерполяцию, определяют точные значения частот fr, на которых выполняется условие равенства нулю выражения (12) и определяется значение r для каждой из них, как округленная до целого числа величина отношения:
r* = fr/(fr - f(r-1)).
Расстояние между репером и поверхностью продукта определится по формуле:
Lx = Vr/4fr. (13)
Предлагаемое устройство для измерения расстояния помимо основного назначения может быть использовано в качестве
- измерителя фазочастотных характеристик коэффициентов передачи и отражения многополюсников, причем при измерении фазы коэффициента передачи измеряемый объект включается между входом и выходом устройства, а при измерении фазы коэффициента отражения - к развязывающему элементу (ферритовый циркулятор, направленный ответвитель), подключенному к входу и выходу устройства,
- измерителя неравномерности группового времени запаздывания (ГВЗ) сигнала в системах передачи информации, причем измеряемый объект включается между выходом и входом устройства.
Если подключить к выходу устройства передающую антенну, а к входу - через переключатель две или более пространственно разнесенные приемные антенны, то устройство получает возможность определения угловой координаты объекта. Для этого процедуру измерения ФЧХ проводят поочередно с каждым из приемных каналов, подключая вход устройства к антенне рабочего канала. Определение угловой координаты проводят либо по величине отношения измеренной разности расстояний к базе (расстоянию между антеннами), либо путем прямого анализа измеренных ФЧХ. Если возможности коммутации в приемном канале ограничены, например, при работе в миллиметровом диапазоне радиоволн, то в состав устройства вводится дополнительно по крайней мере еще один фазовый детектор, подключенный к второй приемной антенне и ГУН. В этом случае переключение каналов производят подключением входа управления ГУН к выходу ФД рабочего канала.
Материалы настоящей заявки свидетельствуют, что предлагаемое изобретение по комплексу признаков и техническому эффекту может открыть новое направление в дальнометрии (обозначим его условно как фазочастотный метод), способное конкурировать с основным направлением этой области техники: непрерывной ЧМ-радиолокацией (частотный метод). Представляет интерес поэтому сопоставить возможности частотного и фазочастотного методов, их принципиальные отличия и сходство.
Общим для этих методов является использование для определения расстояния измерения в диапазоне частот комплексного коэффициента отражения (или передачи) объекта (или пространства), размещенного между выходом и входом измерителя. При этом в частотном методе измеряется действительная часть этой функции, а в фазочастотном - ее аргумент. Из этого следует, что по информативности, например способности различать посторонние объекты, методы по крайней мере сопоставимы.
Точность измерения обоих методов определяется по сути точностью определения частоты излучаемого сигнала в любой момент процесса измерения. В частотном методе эта определенность достигается высокими требованиями к параметрам линейной частотной модуляции и их стабильности. Фазочастотный метод предоставляет возможность прямого измерения частоты с практически неограниченной точностью, что и определяет его безусловное преимущество в этом качестве.
Разрешающая способность каждого из этих методов определяется шириной используемого диапазона частот: девиацией ЛЧМ для частотного и диапазоном перестройки частоты генератора для фазочастотного метода. Величина девиации и линейность ЛЧМ есть параметры противоречивые, а это значит, что высокие значения точности и разрешающей способности одновременно не реализуются. Возможности расширения диапазона перестройки частоты для фазочастотного метода практически не ограничены, причем расширение диапазона рабочих частот приводит не к снижению точности, а к ее увеличению.
Преимущество фазочастотного метода в точности и разрешающей способности реализуется за счет точного измерения множества устанавливаемых системой АПЧ частот генератора, что требует определенного времени, причем тем большего, чем выше требуемые точность и разрешающая способность. Это означает, что по продолжительности измерения фазочастотный метод уступает частотному, реализующему получение результатов измерения в режиме реального времени.

Группа изобретений относится к радиотехнике, а именно к областям радиолокации, радионавигации, и может быть использована в технике радиоизмерений, акустике и оптике. Способ измерения расстояния путем измерения разности фаз излучаемого и принятого периодического сигнала состоит в том, что изменением частоты излучаемого сигнала устанавливают заданную разность фаз ϕo излучаемого и принятого сигналов, измеряют установленное значение частоты генератора, затем многократно на определенные значения Δϕi изменяют заданную разность фаз, измеряют установленные значения частоты генератора fi, вычисляют полную разность фаз φi для каждого значения частоты fi (фазочастотную характеристику) по формуле φi= 2πn+ϕ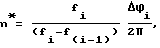 а ϕ
а ϕ из которой определяют расстояние (l), пройденное энергетически большей частью сигнала по заданной траектории, и периодические составляющие, из параметров которых вычисляют разности расстояний, пройденных сигналом по основной и другим траекториям. Для измерения абсолютных координат объектов устанавливают репер, абсолютные координаты которого известны, принимают возвращенный им сигнал и определяют абсолютные координаты объекта или объектов, используя вычисленные по фазочастотной характеристике расстояния между объектами и репером. Устройство для реализации способа измерения расстояния содержит генератор с частотой, управляемой напряжением, подключенный к выходу устройства, средство сравнения фаз, первый вход которого подключен к выходу генератора, второй - к входу устройства, измеритель частоты, подключенный к выходу генератора, и вычислительное средство, подключенное к измерителю частоты и определяющее расстояние, а также соединенное шиной приема - передачи цифровой информации с измерителем частоты и вычислительным средством многофункциональное программируемое управляющее средство (контроллер), вход которого соединен с выходом средства сравнения фаз, а выход - с входом управления частоты генератора, причем процессор и вычислительное средство наделены программой, обеспечивающей реализацию алгоритма измерения фазочастотной характеристики и вычисления расстояний с использованием, например, операций подключения и отключения входа генератора к выходу средства сравнения фаз изменения начальной частоты генератора, изменения знака коэффициента передачи сигнала с выхода фазового детектора на вход генератора. 2 с. и 3 з.п. ф-лы, 5 ил.
из которой определяют расстояние (l), пройденное энергетически большей частью сигнала по заданной траектории, и периодические составляющие, из параметров которых вычисляют разности расстояний, пройденных сигналом по основной и другим траекториям. Для измерения абсолютных координат объектов устанавливают репер, абсолютные координаты которого известны, принимают возвращенный им сигнал и определяют абсолютные координаты объекта или объектов, используя вычисленные по фазочастотной характеристике расстояния между объектами и репером. Устройство для реализации способа измерения расстояния содержит генератор с частотой, управляемой напряжением, подключенный к выходу устройства, средство сравнения фаз, первый вход которого подключен к выходу генератора, второй - к входу устройства, измеритель частоты, подключенный к выходу генератора, и вычислительное средство, подключенное к измерителю частоты и определяющее расстояние, а также соединенное шиной приема - передачи цифровой информации с измерителем частоты и вычислительным средством многофункциональное программируемое управляющее средство (контроллер), вход которого соединен с выходом средства сравнения фаз, а выход - с входом управления частоты генератора, причем процессор и вычислительное средство наделены программой, обеспечивающей реализацию алгоритма измерения фазочастотной характеристики и вычисления расстояний с использованием, например, операций подключения и отключения входа генератора к выходу средства сравнения фаз изменения начальной частоты генератора, изменения знака коэффициента передачи сигнала с выхода фазового детектора на вход генератора. 2 с. и 3 з.п. ф-лы, 5 ил.
где ϕi[fi] - значение разности фаз для измеренного значения частоты fi,
определяют из фазочастотной характеристики линейную составляющую
где V - скорость распространения;
f - частота сигнала,
из крутизны которой определяют расстояние l, пройденное энергетически большей частью сигнала по основной траектории, а также периодическую составляющую и ее спектр для вычисления разности расстояний, пройденных сигналом по основной и другим траекториям.
| US 4829305, 09.05.1989 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ В ДОПЛЕРОВСКИХ ИЗМЕРИТЕЛЯХ ВЕКТОРА СКОРОСТИ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1992 |
|
RU2018864C1 |
| СПОСОБ ПОЛУЧЕНИЯ СЫРЦОВЫХ ПРЯНИКОВ | 2013 |
|
RU2500171C1 |
| Устройство для определения перекоса утка в тканях | 1979 |
|
SU887658A1 |

