Изобретение относится к радиотехническим системам, в частности к радиолокационным системам измерения координат, и может быть использовано в бортовых и наземных РЛС.
Известно устройство слежения за дальностью и скоростью цели (см., например, М.В. Максимов, Г.И. Горгонов. Радиоэлектронные системы наведения. М.: Радио и связь, 1982, с. 213), содержащее дискретный временной различитель (дискриминатор), усилители, два сумматора и два цифровых интегратора.
Недостатком устройства является малое время памяти при срыве сопровождения, а следовательно, и низкая помехоустойчивость отслеживания координат, возникающая за счет несоответствия измерения дальности и скорости цели модели, принятой в измерителе.
Известно также устройство измерения угловых координат (см., например, В. И. Меркулов, В. Н. Лепин. Авиационные системы радиоуправления. М.: Радио и связь, 1997, с. 275), содержащее моноимпульсный пеленгатор (угломер), вычислитель корректирующих сигналов, управитель.
Недостатком известного устройства является недостаточная устойчивость отслеживания координат, возникающая за счет несоответствия изменения угловых координат цели, прогнозируемым изменениям.
Наиболее близким по своей сущности к предлагаемому устройству является устройство измерения координат цели, принятое за прототип (см. Ю.А. Шишов, В. А. Ворошилов Многоканальная радиолокация с временным разделением каналов. М. : Радио и связь, 1987, с. 84, рис. 3.6), которое содержит синхронный интегратор и измеритель рассогласования по дальности, на соединенные входы которых подается сигнал с выхода приемника радиолокатора; выход синхронного интегратора соединен с входами измерителя угловых координат и пороговым блоком, выход измерителя угловых координат соединен с первым входом блока считывания угловых координат, второй вход его соединен с выходом порогового блока, выход которого также соединен с первым входом блока считывания дальности, а второй вход последнего - с выходом измерителя рассогласования дальности.
Недостатком устройства, принятого за прототип, является наличие перерывов в выдаче информации о координатах цели (дальности и углах) при резком снижении отношения мощности сигнала к мощности шума или помехи (далее отношение сигнал/шум) или перерывах в работе передатчика радиолокатора, предпринимаемых для повышения скрытности. Это обусловлено тем, что обычные дальномеры и угломеры практически не обеспечивают работу в режиме памяти при интенсивном маневрировании цели [2].
Техническим результатом изобретения является повышение устойчивости слежения за координатами цели.
Сущность изобретения заключается в том, что в устройство измерения координат, содержащее синхронный интегратор и измеритель рассогласования по дальности, на соединенные входы которых подается сигнал с выхода приемника радиолокатора, выход синхронного интегратора соединен со входами измерителя угловых координат и пороговым блоком, выход измерителя угловых координат соединен с первым входом блока считывания угловых координат, второй вход его соединен с выходом порогового блока, выход которого также соединен с первым входом блока считывания дальности, а второй вход последнего - с выходом измерителя рассогласования дальности, дополнительно включен вычислитель, первый вход которого соединен с выходом блока считывания угловых координат, второй вход с выходом блока считывания дальности, на третий, четвертый и пятый входы подается информация об ориентации цели относительно радиолокатора в горизонтальной, вертикальной плоскостях и скорости цели, соответственно; первый и второй выход вычислителя соединены с первым и вторым входами управляемого переключателя, третий и четвертый входы его соединены с выходами блока считывания угловых координат и дальности, соответственно, пятый вход соединен с выходом порогового блока.
При анализе известных технических решений не обнаружены решения, имеющие признаки, сходные с отличительными признаками изобретения.
На чертеже приведена функциональная схема устройства для отслеживания координат цели.
Устройство состоит из синхронного интегратора 1, выход которого соединен со входом угломера 2 и порогового блока 6, выход угломера 2 соединен с первым входом блока считывания угловых координат 3, выход порогового блока 6 соединен со вторым входом блока считывания угловых координат 3, вторым входом блока считывания дальности 5, пятым входом управляемого переключателя 8, вход измерителя дальности 4 соединен со входом синхронного генератора 1, выход его соединен с первым входом блока считывания дальности 5, выход которого, в свою очередь, соединен со вторым входом вычислителя 7 и третьим входом управляемого переключателя 8, выход блока считывания угловых координат 3 соединен с первым входом вычислителя и четвертым входом управляемого переключателя 8, первый и второй выходы вычислителя 7 соединены с первым и вторым входами управляемого переключателя 8, соответственно.
Работа устройства слежения за координатами цели осуществляется следующим образом. На вход измерителя с выхода приемника радиолокатора поступают выборки сигнала. Эти сигналы накапливаются в синхронном интеграторе 1 и одновременно поступают на измеритель рассогласования по дальности 4, где по каждому принятому сигналу измеряется сигнал ошибки, результат усредняется по всем предыдущим измерениям и суммируется с экстраполированным значением дальности. Сигнал ошибки по угловым координатам в измерителе 2 измеряется по накопленному в синхронном интеграторе 1 сигналу. Одновременно накопленный сигнал с выхода синхронного интегратора поступает на пороговый блок 6, пороговый уровень которого установлен так, чтобы накопленный сигнал, достигал его при накоплении такого отношения сигнал/шум, которое обеспечивает измерение координат с заданной погрешностью. В этом случае пороговый блок 6 выдает сигнал, разрешающий считывание измеренных координат цели. Цифровые коды угловых координат и дальности с выхода блока считывания угловых координат 3 и блока считывания дальности 5, соответственно, поступают на первый и второй входы вычислителя и 4 и 5 входы управляемого переключателя. Под действием сигнала порогового блока, свидетельствующего о наличии необходимого соотношения сигнал/шум, а следовательно, и необходимой точности измерения, эти коды подаются на выход схемы и поступают потребителю информации.
При действии, например, шумовой помехи на входе радиолокатора это соотношение уменьшается ниже допустимого уровня (точность измерения не обеспечивается), уровень сигнала на выходе порогового блока изменяется, и в схеме происходят следующие переключения: перестает считываться сигнал с выхода блоков 3 и 5 (последние значения кодов этих сигналов используются в вычислителе как начальные данные для работы вычислителя), управляемый переключатель 8 подключает к своим выходам 1 и 2 сигналы вычислителя 8, поступающие на входы 1 и 2, вместо сигналов, поступавших на входы 3 и 4.
Вычислитель 7 работает следующим образом. На его вход поступает информация об угловой ориентации цели относительно линии визирования от оптического или тепловизионного датчика в горизонтальной и вертикальной плоскостях (сигналы Δ1 и Δ2, соответственно), не подвергавшиеся действию помех радиодиапазона, а также запомненные последние перед началом действия помех значения скорости цели, измеряемые соответствующим устройством радиолокатора. Вычислитель, на основе начальных условий и входной информации, определяет дальность и угловые координаты цели путем решения системы дифференциальных уравнений, полученных авторами.
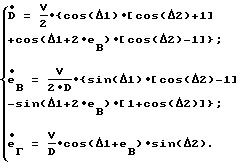
Здесь обозначено:
D - дальность до цели,
V - скорость цели,
ев - угол визирования цели в угломестной плоскости,
ег- угол визирования цели в азимутальной плоскости.
Устройство обеспечивает определение дальности и угловых координат цели в течение времени действия помехи с ошибками, не превосходящими ширину дискриминационной характеристики по дальности и угловым координатам в течение 8-12 с и более. Это позволяет значительно увеличить помехоустойчивость и упростить дальнейший переход в режим слежения по окончании действия помехи или режима молчания радиолокатора.
ЛИТЕРАТУРА
1. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы наведения. М.: Радио и связь, 1982.
2. Меркулов В. И., Лепин В.Н. Авиационные системы радиоуправления. М.: Радио и связь, 1997.
3. Шишов Ю. А., Ворошилов В.А. Многоканальная радиолокация с временным разделением каналов. М.: Радио и связь, 1987.
Данное устройство относится к области радиолокационных систем измерения координат и предназначено к использованию в радиолокаторах. Оно обеспечивает увеличение времени памяти следящей системы в условиях действия помех или периодического выключения радиолокатора за счет использования вычислителя координат, что, в свою очередь, приводит к повышению помехоустойчивости, что и является достигаемым техническим результатом. 1 ил.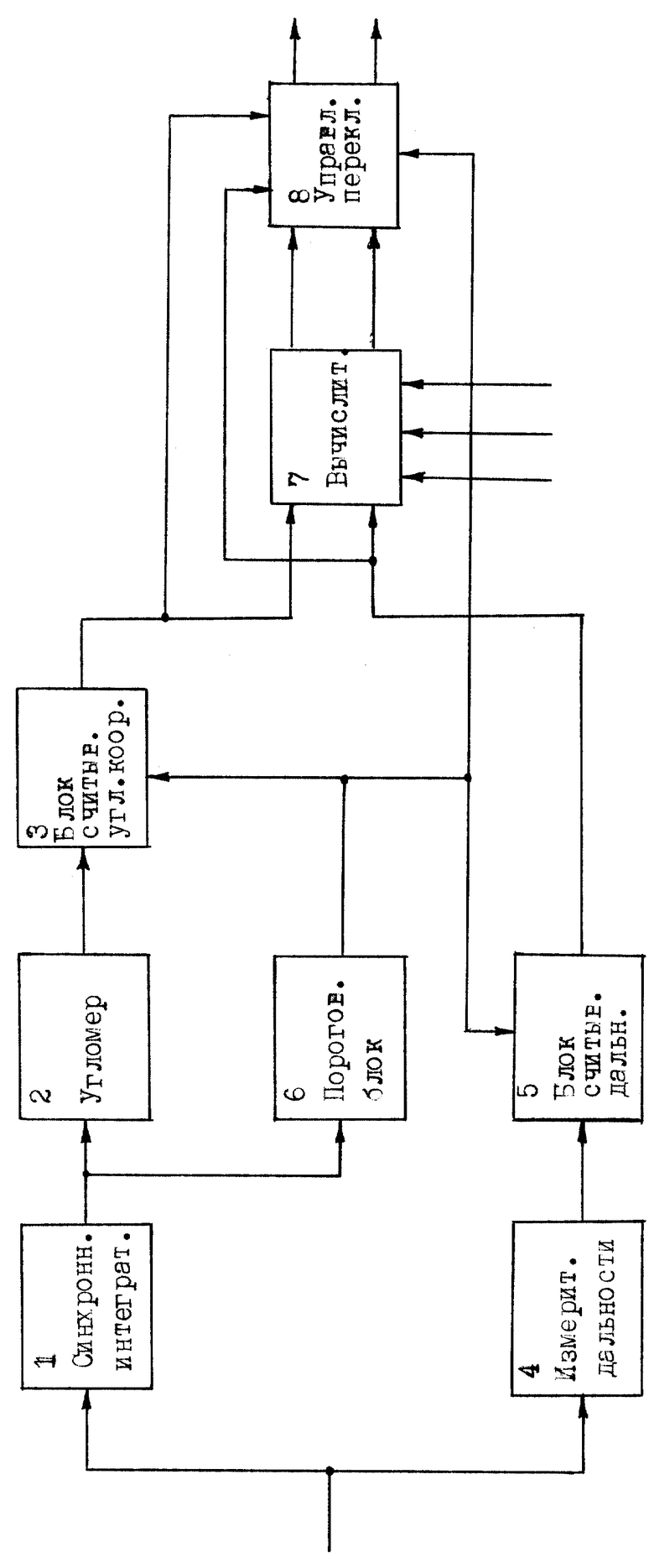
Устройство измерения координат, содержащее синхронный интегратор и измеритель дальности, на соединенные входы которых подается сигнал с выхода приемника радиолокатора, выход синхронного интегратора соединен со входами измерителя угловых координат и пороговым блоком, выход измерителя угловых координат соединен с первым входом блока считывания угловых координат, второй вход его соединен с выходом порогового блока, выход которого также соединен с первым входом блока считывания дальности, а второй вход последнего - с выходом измерителя дальности, отличающееся тем, что в него дополнительно включен вычислитель, первый вход которого соединен с выходом блока считывания угловых координат, второй вход - с выходом блока считывания дальности, на третий, четвертый и пятый входы подается информация об ориентации цели относительно радиолокатора в горизонтальной, вертикальной плоскостях и скорости цели соответственно; первый и второй выход вычислителя соединен с первым и вторым входами управляемого переключателя, третий и четвертый входы его соединены с выходами блока считывания угловых координат и дальности и соответственно пятый вход соединен с выходом порогового блока.
| ШИШОВ Ю.А., ВОРОШИЛОВ В.А | |||
| Многоканальная радиолокация с временным разделением каналов | |||
| - М.: Радио и связь, 1987, с.84, рис.3.6 | |||
| US 5214433 A, 25.05.1993 | |||
| US 5325098 A, 28.06.1994 | |||
| СИСТЕМА СЛЕЖЕНИЯ ПО УГЛУ МЕСТА | 1994 |
|
RU2083997C1 |
