Изобретение относится к способам обнаружения маневра цели радиотехническими системами, в частности радиолокационными системами сопровождения воздушных целей, и может быть использовано в бортовых РЛС.
Известен способ обнаружения маневра, основанный на автоматическом устранении расхождения следящего фильтра (см., например, В.И. Меркулов и В.Н. Лепин. Авиационные системы радиоуправления. М.: Радио и связь, 1997, с.306), реализованный в устройстве, содержащем дискретный фильтр Калмана, усилитель, умножитель, сумматор и логическую схему сравнения.
Недостатком способа является низкая помехоустойчивость, а именно подверженность воздействию уводящих помех, имитирующих маневр цели.
Наиболее близким по своей сущности к предлагаемому способу является способ обнаружения маневра на основе анализа обновляющей последовательности (см. А. Фарина, Ф. Студер. Цифровая обработка радиолокационной информации. М.: Радио и связь, 1993, с.224), образующейся путем сравнения входного сигнала обнаружителя маневра и сигнала предсказания, формирующегося непосредственно в обнаружителе маневра. Обновляющую последовательность обрабатывают набором низкочастотных фильтров, настроенных на определеный маневр цели. Наибольший по уровню сигнал будет на выходе фильтра, согласованного с обновляющей последовательностью. Если при этом будет превышен порог, то принимают решение о наличии маневра цели с характеристиками, соответствующими настройке согласованного фильтра.
Недостатком способа, принятого за прототип, является невозможность различения уводящих помех и маневров цели из-за отсутствия обнаружителя уводящих помех.
Техническим результатом изобретения является повышение помехоустойчивости обнаружителя маневра цели.
Сущность изобретения заключается в том, что в способе обнаружения маневра цели на основе анализа обновляющей последовательности отслеживаемой координаты цели, например дальности и азимута, которая обрабатывается набором низкочастотных фильтров, настроенных на определенный маневр цели, и по результатам сравнения выходных сигналов этих фильтров определяют тип маневра, дополнительно выходные сигналы обнаружителей маневра по дальности и азимуту сравнивают по принципу логического умножения. По результатам сравнения принимают решение о наличии маневра цели или действии уводящей помехи. При наличии информации о начале маневра от двух обнаружителей маневра принимают решение о маневре, а при отсутствии информации о маневре от одного из обнаружителей маневра считают, что действует уводящая помеха.
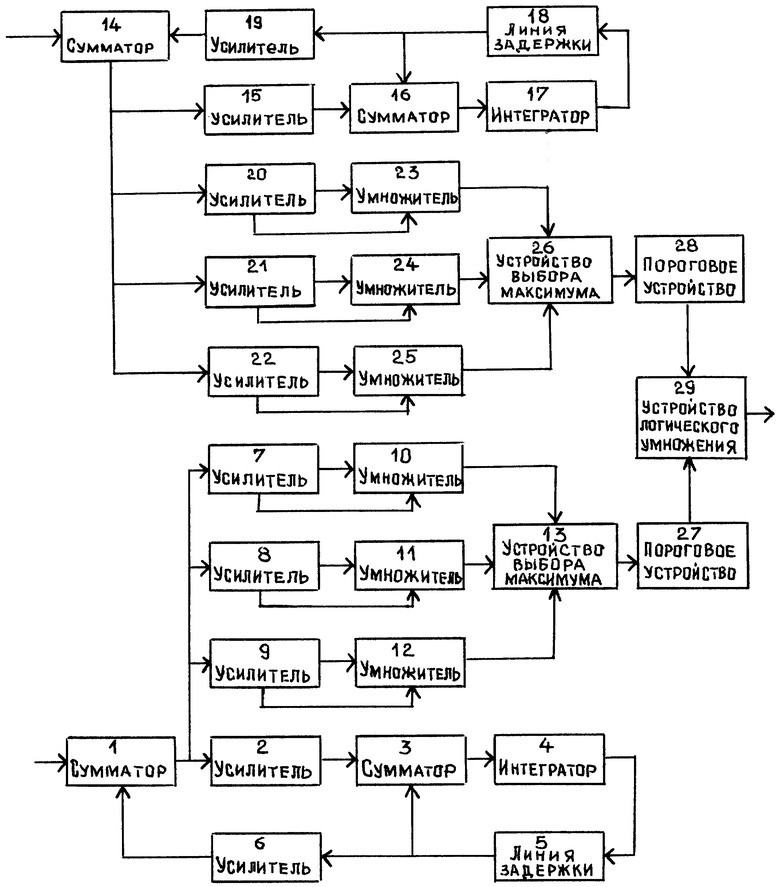
На чертеже приведена функциональная схема устройства, реализующего способ помехозащищенного обнаружения маневра.
Устройство состоит из первого сумматора (СМ) 1, к выходу которого параллельно подключены первый усилитель (У) 2 и усилители видов маневра 7, 8, 9, выход первого усилителя 2 соединен с первым входом второго сумматора 3, выход которого через первый интегратор (И) 4, первую линию задержки (ЛЗ) 5 соединен с вторым входом второго сумматора 3 и входом второго усилителя 6, выход которого подключен к второму входу первого сумматора 1, выходы усилителей видов маневра 7, 8, 9 соединены через умножители (УМ) 10, 11, 12 соответственно с первым устройством выбора максимума (УВМ) 13, выход которого через первое пороговое устройство (ПУ) 27 соединен с первым входом устройства логического умножения (УЛУ) 29, к выходу третьего сумматора 14 параллельно подключены третий усилитель 15 и усилители видов маневра 20, 21, 22, выход третьего усилителя 15 соединен с первым входом четвертого сумматора 16, выход которого через второй интегратор 17, вторую линию задержки 18 соединен с вторым входом четвертого сумматора 16 и входом четвертого усилителя 19, выход которого подключен к второму входу третьего сумматора 14, выходы усилителей видов маневра 20, 21, 22 соединены через умножители 23, 24, 25 соответственно с вторым устройством выбора максимума 26, выход которого через второе пороговое устройство 28 соединен с вторым входом устройства логического умножения 29.
Сущность функционирования устройства помехозащищенного обнаружения маневра заключается в следующем.
На входы первого 1 и третьего 14 сумматоров подаются входные дискретные сигналы с временем дискретизации Тп, например на вход первого сумматора 1 поступает напряжение, пропорциональное дальности до цели, а на вход третьего сумматора 14 подается напряжение, пропорциональное азимуту цели. Обновление входных сигналов осуществляется через время Тп, на это же время сигналы задерживаются в устройствах задержки 5 и 18. В импульсной РЛС это время равно периоду повторения импульсов. Сигнал рассогласования на выходе первого сумматора 1 формируется путем сложения входной величины координаты цели и величины сигнала предсказания, полученного путем усиления во втором усилителе 6 и задержки в первой линии задержки 5 измеренной дальности на выходе первого интегратора 4. Сигнал рассогласования поступает на входы усилителей видов маневра 7, 8, 9, каждый из которых согласован с определенным типом маневра. Первое устройство выбора максимума 13 определяет максимальный сигнал и подает его на первое пороговое устройство 27. При превышении сигналом порога он поступает на первый вход устройства логического умножения 29. Сигнал рассогласования по азимуту на выходе третьего сумматора 14 формируется путем сложения входной величины азимута и предсказанного значения, полученного путем усиления в четвертом усилителе 19 и задержки во второй линии задержки 18 измеренного азимута на выходе второго интегратора 17. Сигнал рассогласования поступает на входы усилителей видов маневра 20, 21, 22, каждый из которых согласован с определенным типом маневра. Второе устройство выбора максимума 26 определяет максимальный сигнал и подает его на второе пороговое устройство 28. При превышении сигналом порога он поступает на второй вход устройства логического умножения 29. На выходе устройства логического умножения 29 при наличии двух сигналов на входе получается информация о наличии маневра цели. При отсутствии сигнала на одном входе устройства логического умножения 29 с его выхода снимается информация о действии уводящей помехи, имитирующей маневр по одной координате. На следующем такте работы операции повторяются.
Таким образом, предложенный способ помехозащищенного обнаружения маневра и устройство для его реализации позволяют эффективно различать действие уводящей помехи по одной координате цели и изменение координаты цели за счет маневрирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2004 |
|
RU2292061C2 |
| СПОСОБ ПОМЕХОЗАЩИЩЕННОГО ОБНАРУЖЕНИЯ МАНЕВРА ВОЗДУШНОЙ ЦЕЛИ | 2008 |
|
RU2403590C2 |
| ДАЛЬНОМЕРНЫЙ КАНАЛ РАДИОЛОКАЦИОННОЙ СТАНЦИИ СОПРОВОЖДЕНИЯ С РАННИМ ОБНАРУЖЕНИЕМ УВОДЯЩЕЙ ПО ДАЛЬНОСТИ ПОМЕХИ | 1999 |
|
RU2170443C1 |
| АДАПТИВНЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 2001 |
|
RU2204146C2 |
| ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1998 |
|
RU2173468C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОРОГОМ В ОПТИМАЛЬНОМ ОБНАРУЖИТЕЛЕ | 2004 |
|
RU2292114C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ПОЛЯРИЗАЦИОННОГО ПОРТРЕТА ЗЕМНОЙ ИЛИ МОРСКОЙ ПОВЕРХНОСТИ В ДВУХЧАСТОТНОЙ ЦИФРОВОЙ РСА | 1999 |
|
RU2166774C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНОЙ ДАЛЬНОСТИ ЦЕЛИ ПО ИЗЛУЧЕНИЮ СКАНИРУЮЩЕЙ РЛС | 1999 |
|
RU2166199C2 |
| УСТРОЙСТВО СЛЕЖЕНИЯ ЗА КООРДИНАТАМИ ЦЕЛИ | 2000 |
|
RU2189056C2 |
Изобретение относится к обнаружениям маневра цели радиолокационными системами сопровождения. Технический результат заключается в повышении помехоустойчивости обнаружителя маневра цели. Способ заключается в том, что обнаруживают маневр цели на основе анализа обновляющей последовательности отслеживаемых координат цели, а именно дальности и азимута, которая обрабатывается набором низкочастотных фильтров, настроенных на определенный тип маневра цели, и по результатам сравнения выходных сигналов этих фильтров определяют тип маневра, выходные сигналы обнаружителей маневра по дальности и азимуту сравнивают по правилу логического умножения и по результатам сравнения судят о наличии маневра цели или действия уводящй помехи, имитирующей маневр по одной координате. 1 ил.
Способ помехозащищенного обнаружения маневра, заключающийся в том, что обнаруживают маневр цели на основе анализа обновляющей последовательности отслеживаемых координат цели, а именно дальности и азимута, которая обрабатывается набором низкочастотных фильтров, настроенных на определенный тип маневра цели, и по результатам сравнения выходных сигналов этих фильтров определяют тип маневра, отличающийся тем, что выходные сигналы обнаружителей маневра по дальности и азимуту сравнивают по правилу логического умножения и по результатам сравнения судят о наличии маневра цели или действия уводящей помехи, имитирующей маневр по одной координате.
| ФАРИНА А | |||
| и др | |||
| Цифровая обработка радиолокационной информации | |||
| - М.: Радио и связь, 1993, с.224 | |||
| Измеритель допплеровских частот | 1975 |
|
SU559201A1 |
| Способ разрешения импульсных сигналов | 1977 |
|
SU697939A1 |
| SU 1667510 А1, 10.08.1999 | |||
| SU 1184367 A, 30.09.1986. | |||

