Изобретение относится к области радиолокации и может быть использовано в наземных радиолокаторах с режимом пассивного обнаружения и измерения координат неизлучающих целей.
Известен способ пассивного определения дальности цели с использованием сигнала обзорной РЛС (Л.Б. Брант. Справочник по методам радиоэлектронного подавления и помехозащиты систем с радиолокационным управлением, 1987).
Сущность способа состоит в следующем. РЛС с известными координатами осуществляет круговое сканирование узким лучом в горизонтальной плоскости. На приемной позиции определяют угол в горизонтальной плоскости α, равный разности азимутов цели и приемной позиции относительно РЛС по времени tα прохода луча РЛС между целью и приемной позицией
где Т - период вращения антенны.
Измеряют также разность расстояний РЛС - цель - приемная позиция и РЛС - приемная позиция по задержке отраженного сигнала относительно прямого. С использованием теоремы косинусов определяют дальность цели R.
Недостаток данного способа заключается в том, что должны быть известны координаты РЛС.
Известен способ определения местоположения РЛС, излучающей радиоимпульсы с помощью сканирующей антенны (Патент ЕПВ 0342529, МКИ 4 G 01 S 13/02, 13/87. Способ определения местоположения излучателя радиосигналов).
Вначале в приемной позиции запоминают координаты нескольких находящихся в пределах прямой видимости точек на местности. Затем измеряют времена запаздывания сигналов, отраженных от этих точек, относительно момента приема импульса, излученного РЛС. На основе измеренных времен запаздываний вычисляют вероятные местоположения РЛС и соответствующие отраженные сигналы. Отраженные сигналы сравнивают с запомненными данными о точках на местности.
Недостатком данного способа является то, что определяется местоположение только целей, имеющих РЛС.
Известен способ определения координат цели с использованием РЛС, излучающей кодированные сигналы (Патент Японии 1-57312, МКИ 4 G 01 S 13/46. Пассивная радиолокационная система. Заявка от 06.10.81).
Источник радиосигналов излучает импульсы с помощью сканирующей направленной антенны. Импульсы кодируются в соответствии с текущими углами азимута и места антенны. Приемная позиция с помощью направленной антенны определяет азимут обнаруженной цели и декодирует углы азимута и места излучающей антенны из принимаемых отраженных электромагнитных импульсов. По измеренным углам и известному местоположению источника радиосигналов определяют координаты цели.
Недостатками данного способа являются необходимость знания на приемной позиции кода, используемого источником радиосигналов, и его местоположения.
Известен способ, изложенный в (Munich A., Schecker E. Bistatic Sistem Passively Tracks Radar Targets. Microwaves & RF, 1991, 30, 9, p. 78-79, 82-83).
Сущность способа состоит в том, что на приемной позиции (ПРМ) измеряют угол α, равный разности азимутов цели и ПРМ относительно РЛС по времени прохода луча РЛС между целью и ПРМ, угол γ, равный разности азимутов РЛС и цели относительно ПРМ с помощью направленной антенны ПРМ, и разность расстояний τ (РЛС - цель - ПРМ и РЛС - ПРМ по задержке отраженного сигнала относительно прямого сигнала, искомая горизонтальная дальность равна:
Недостатком такого способа определения дальности является появление ошибок в случае, если цель, РЛС и приемная позиция не лежат в горизонтальной плоскости. Для случая наземного расположения РЛС и приемной позиции чем больше высота цели, тем больше ошибка измерения дальности.
В качестве прототипа выбран способ, изложенный в (Патент России 2166199 от 27.04.2001, МКИ 7 G 01 S 5/10, 3/02. Способ определения горизонтальной дальности цели по излучению сканирующей РЛС).
Сущность способа определения дальности цели заключается в том, что измеряют разность азимутов ПРМ и цели относительно РЛС, разность азимутов РЛС и цели относительно ПРМ, разность расстояний РЛС - цель - ПРМ и РЛС - ПРМ, а также угол места цели β с помощью направленной антенны ПРМ, горизонтальную дальность цели определяют по формуле:
где α - разность азимутов ПРМ и цели относительно РЛС;
γ - разность азимутов РЛС и цели относительно ПРМ;
τ - разность расстояний РЛС - цель - ПРМ и РЛС - ПРМ;
β - угол места цели относительно ПРМ.
Недостатком такого способа определения дальности является ограниченность его применения случаем наземного расположения приемной позиции и РЛС.
Техническим результатом предлагаемого способа является расширение его области применения для произвольного взаимного расположении РЛС и ПРМ.
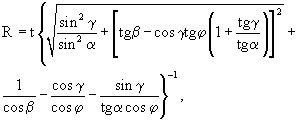
Сущность предлагаемого способа определения дальности цели заключается в той, что измеряют разность азимутов ПРМ в цели относительно РЛС, разность азимутов РЛС и цели относительно ПРМ, разность расстояний РЛС - цель - ПРМ и РЛС - ПРМ, угол места цели β, а также угол места РЛС ϕ, горизонтальную дальность цели определяют по формуле:
где α - разность азимутов приемной позиции и цели относительно РЛС;
γ - разность азимутов РЛС и цели относительно приемной позиции;
τ - разность расстояний РЛС - цель - приемная позиция и РЛС - приемная позиция;
β - угол места цели относительно приемной позиции;
ϕ - угол места РЛС относительно приемной позиции.
Сущность способа поясняется следующим. Пусть начало системы координат совмещено с ПРМ, ось Оy направлено через проекцию точки расположения РЛС на горизонтальную плоскость, a Oz - вертикально вверх (см. фиг.1). Величины α, γ, β, ϕ и τ связаны с координатами РЛС и цели следующим образом:



Выразим  через углы и искомую горизонтальную дальность цели R:
через углы и искомую горизонтальную дальность цели R:
Считая положительным направление вращения по часовой стрелке, после преобразований получаем выражение (3). В частном случае, когда РЛС лежит в горизонтальной плоскости (ϕ=0), приходим к формуле (2).
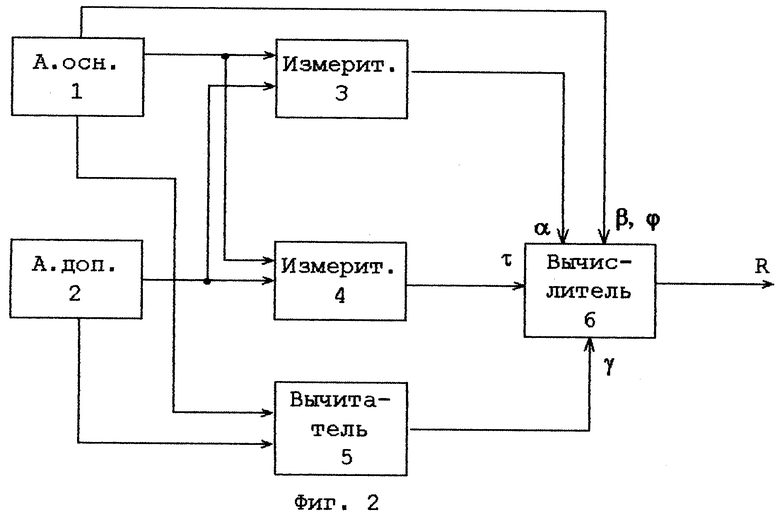
На фиг. 2 представлена схема устройства для реализации предложенного способа. Оно состоит из антенны основной 1, антенны дополнительной 2, измерителя 3, измерителя 4, вычитателя 5, вычислителя 6. Способ реализуется следующим образом. Остронаправленный луч основной антенны 1 направлен на цель. Эхосигналы поступают в измеритель 3 и измеритель 4. Антенна дополнительная 2 направлена на излучающую РЛС. Прямые сигналы поступают в измеритель 3 и измеритель 4. В измерителе 4 определяется разность расстояний τ по задержке эхосигнала относительно прямого. В измерителе 3 определяется α по интервалу времени между моментом приема пачки эхосигналов и моментом приема пачки прямых импульсов с учетом известного периода вращения антенны РЛС, который может быть измерен заранее. В вычитателе 5 вычисляется угол γ путем нахождения разности азимутов антенны основной 1 и антенны дополнительной 2. В вычислитель 6 поступают значения α, τ, γ, а также углы места цели β и РЛС ϕ от антенны основной 1. В вычислителе определяется горизонтальная дальность цели R по формуле (3).
Таким образом, данный способ позволяет измерять дальность цели при любом взаимном положении РЛС и ПРМ путем учета угла места РЛС. Например, возможно измерять дальность в наземной приемной позиции по излучению бортовой сканирующей РЛС, или наоборот, измерять дальность в бортовой ПРМ по излучению наземной РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНОЙ ДАЛЬНОСТИ ЦЕЛИ ПО ИЗЛУЧЕНИЮ СКАНИРУЮЩЕЙ РЛС | 1999 |
|
RU2166199C2 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| Способ определения местоположения обзорной РЛС пассивным пеленгатором | 2018 |
|
RU2741331C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА НАБЛЮДЕНИЯ (РАКУРСА) ВОЗДУШНОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2316789C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПУТЕВОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В НАЗЕМНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2004 |
|
RU2273033C2 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| СПОСОБ ТОМОГРАФИЧЕСКОЙ РЕГИСТРАЦИИ НАКЛОННОЙ ДАЛЬНОСТИ И АЗИМУТА ПОЛОЖЕНИЯ НАДВОДНЫХ ОБЪЕКТОВ И ОБЪЕКТОВ НАД ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТЬЮ | 2021 |
|
RU2760976C1 |
Изобретение относится к радиолокации и может быть использовано в наземных и бортовых РЛС с режимом пассивного обнаружения и измерения координат неизлучающих целей. Достигаемым техническим результатом изобретения является расширение области применения способа измерения дальности целей на случай произвольного взаимного расположения приемной позиции и сканирующей РЛС. Изобретение заключается в том, что для учета высоты РЛС, кроме угла при сканирующей РЛС, угла при приемной позиции, времени запаздывания отраженного сигнала относительно прямого и угла места цели относительно приемной позиции, дополнительно измеряется угол места РЛС относительно приемной позиции и горизонтальную дальность цели определяют по математическому выражению. 2 ил.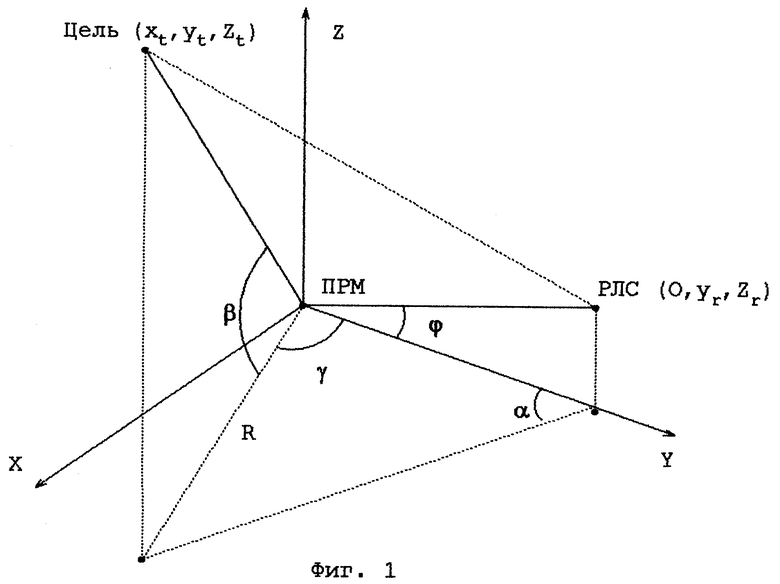
Способ определения горизонтальной дальности цели по излучению сканирующей бортовой РЛС, заключающийся в том, что измеряют разность азимутов приемной позиции и цели относительно РЛС, разность азимутов РЛС и цели относительно приемной позиции, разность расстояний РЛС - цель - приемная позиция и РЛС - приемная позиция, угол места цели β, отличающийся тем, что измеряют угол места РЛС ϕ с помощью направленной антенны приемной позиции, при этом горизонтальную дальность цели определяют по формуле
где α - разность азимутов приемной позиции и цели относительно РЛС;
γ - разность азимутов РЛС и цели относительно приемной позиции;
t - разность расстояний РЛС - цель - приемная позиция и РЛС - приемная позиция;
β - угол места цели относительно приемной позиции;
ϕ - угол места РЛС относительно приемной позиции.
| СПОСОБ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНОЙ ДАЛЬНОСТИ ЦЕЛИ ПО ИЗЛУЧЕНИЮ СКАНИРУЮЩЕЙ РЛС | 1999 |
|
RU2166199C2 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОСТАНЦИИ ПО РАЗНОСТИ ПРИХОДА РАДИОСИГНАЛА ВО ВРЕМЕНИ В ПУНКТЫ ПРИЕМА | 1993 |
|
RU2096800C1 |
| US 4438439 А, 20.03.1984 | |||
| US 4558323 А, 10.12.1985. | |||

