Изобретение относится к электротехнике и может быть использовано для управления электрическими машинами переменного тока, статорная обмотка которых подключена к трехфазной сети переменного тока, а роторная получает питание от регулируемого преобразователя частоты, в частности в ветроэнергетике для управления асинхронизированными синхронными генераторами ветроэнергетических установок, работающих параллельно с сетью.
Известно устройство для управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, содержащее двигатель двойного питания, третий арифметический блок, частотный компаратор, управляемый аналоговый коммутатор, второй интегратор, второй сумматор, умножители, блок преобразований токов статора и датчик фазных токов статора (см. авт. св. СССР 1610589, БИ 44, 1991).
Недостаток известного решения заключается в невозможности стабилизации напряжения в сети и управления вырабатываемой активной и реактивной мощностью, т.к. в данном устройстве рассматривается работа двигателя двойного питания, а не асинхронизированного синхронного генератора.
Известно также устройство для управления асинхронизированным синхронным генератором, содержащее преобразователь частоты, подключенный выходом к роторной цепи асинхронизированного синхронного генератора, статорная цепь которого подключена к трехфазной сети, последовательно соединенные датчик углового положения ротора, непосредственно связанный с ротором асинхронизированного синхронного генератора, и формирователь гармонических функций частоты скольжения, последовательно соединенные первый элемент сравнения и первый регулятор тока, а также первый блок преобразования координат, датчики тока и напряжения статорной цепи, датчик частоты вращения, непосредственно связанный с ротором асинхронизированного синхронного генератора, и датчик скорости ветра (см. авт. св. СССР 1399885, БИ 20, 1986).
Данное устройство по своей технической сущности является наиболее близким к предлагаемому изобретению.
Однако в этом устройстве не обеспечивается стабилизация напряжения в маломощной сети переменного тока при работе ветроэнергетической установки. Кроме того, в этом устройстве не учитывается влияние изменений частоты вращения ротора и внутренних переменных асинхронизированного синхронного генератора на качество управления вырабатываемой ветроэнергетической установкой мощностью. Поэтому устройство-прототип нельзя использовать для качественной стабилизации напряжения в маломощной (сельской) сети переменного тока и качественного управления вырабатываемой мощностью.
Задачей, на решение которой направлено заявляемое техническое решение, является обеспечение стабилизации напряжения в маломощной (сельской) сети переменного тока при изменении мощности ветрового потока и повышение качества управления активной и реактивной мощностью, вырабатываемой ветроэнергетической установкой, подключенной к этой сети.
Технический результат, который может быть получен при реализации заявляемого технического решения, выражается в формировании дополнительных сигналов управления, подаваемых на входы преобразователя частоты, обеспечивающих стабилизацию напряжения в сети и компенсирующих вредное воздействие изменений частоты вращения ротора и внутренних переменных асинхронизированного синхронного генератора на качество управления активной и реактивной мощностью, вырабатываемой ветроэнергетической установкой.
Поставленная задача решается тем, что в устройство для управления асинхронизированным синхронным генератором, содержащее преобразователь частоты, подключенный выходом к роторной цепи асинхронизированного синхронного генератора, статорная цепь которого подключена к трехфазной сети, последовательно соединенные датчик углового положения ротора, непосредственно связанный с ротором асинхронизированного синхронного генератора, и формирователь гармонических функций частоты скольжения, последовательно соединенные первый элемент сравнения и первый регулятор тока, а также первый блок преобразования координат, датчики тока и напряжения статорной цепи, датчик частоты вращения, непосредственно связанный с ротором асинхронизированного синхронного генератора, и датчик скорости ветра, дополнительно вводятся последовательно соединенные второй блок преобразования координат, подключенный тремя входами к трем соответствующим выходам датчика напряжения статорной цепи, третий блок преобразования координат, первый усилитель, первый блок умножения и первый сумматор, подключенный выходом к первому входу первого блока преобразования координат, последовательно соединенные четвертый блок преобразования координат, подключенный тремя входами к трем соответствующим выходам датчика тока статорной цепи, пятый блок преобразования координат, третий и четвертый входы которого подключены ко второму и третьему выходам третьего блока преобразования координат и ко второму и третьему входам первого блока преобразования координат соответственно, второй сумматор, второй вход которого соединен с выходом первого усилителя, и второй блок умножения, соединенный выходом со вторым входом первого сумматора, последовательно соединенные второй усилитель, подключенный входом ко второму выходу пятого блока преобразования координат, третий блок умножения и третий сумматор, второй вход которого соединен с выходом первого регулятора тока, а выход - с четвертым входом первого блока преобразования координат, последовательно соединенные блок возведения в третью степень, подключенный входом к выходу датчика скорости ветра, нелинейный элемент, первый квадратор, четвертый, сумматор, блок извлечения квадратного корня и управляемый электронный ключ, соединенный выходом с первым входом первого элемента сравнения, второй вход которого подключен к выходу второго сумматора, последовательно соединенные задатчик напряжения, второй элемент сравнения, второй вход которого подключен к первому выходу третьего блока преобразования координат, регулятор напряжения, второй квадратор, пятый сумматор, подключенный вторым входом к выходу первого квадратора, и компаратор, второй вход которого соединен с выходом задатчика максимального тока и вторым входом четвертого сумматора, а выход - с управляющим входом управляемого электронного ключа, подключенного вторым силовым входом к выходу регулятора напряжения, последовательно соединенные третий элемент сравнения, подключенный первым входом к выходу нелинейного элемента, а вторым входом - к выходу второго усилителя, и второй регулятор тока, соединенный выходом с третьим входом первого сумматора, последовательно соединенные задатчик частоты тока статора и шестой сумматор, второй вход которого соединен с выходом датчика частоты вращения, а выход - со вторыми входами первого, второго и третьего блоков умножения, причем пятый и шестой входы первого блока преобразования координат соединены с соответствующими выходами формирователя гармонических функций частоты скольжения, а три его выхода - с тремя управляющими входами преобразователя частоты, который получает питание от трехфазной сети.
Сопоставительный анализ существенных признаков заявляемого технического решения с существенными признаками известных аналогов и прототипа показывает, что заявляемое устройство соответствует критерию "новизна".
Заявленная совокупность признаков, приведенная в отличительной части формулы изобретения, позволяет стабилизировать напряжение в сети при изменении мощности ветрового потока и компенсировать изменения частоты вращения ротора и внутренних переменных генератора, что, в свою очередь, позволяет получить высокое качество управления вырабатываемой мощностью генератора.
Блок-схема предлагаемого устройства для управления асинхронизированным синхронным генератором представлена на чертеже.
Устройство для управления асинхронизированным синхронным генератором содержит преобразователь частоты 1, подключенный выходом к роторной цепи асинхронизированного синхронного генератора 2, статорная цепь которого подключена к трехфазной сети 3, последовательно соединенные датчик 4 углового положения ротора, непосредственно связанный с ротором асинхронизированного синхронного генератора 2, и формирователь 5 гармонических функций частоты скольжения, последовательно соединенные первый элемент 6 сравнения и первый регулятор 7 тока, а также первый блок 8 преобразования координат, датчики тока 9 и напряжения 10 статорной цепи, датчик 11 частоты вращения, непосредственно связанный с ротором асинхронизированного синхронного генератора 2, и датчик 12 скорости ветра, последовательно соединенные второй блок 13 преобразования координат, подключенный тремя входами к трем соответствующим выходам датчика 10 напряжения статорной цепи, третий блок 14 преобразования координат, первый усилитель 15, первый блок 16 умножения и первый сумматор 17, подключенный выходом к первому входу первого блока 8 преобразования координат, последовательно соединенные четвертый блок 18 преобразования координат, подключенный тремя входами к трем соответствующим выходам датчика 9 тока статорной цепи, пятый блок 19 преобразования координат, третий и четвертый входы которого подключены ко второму и третьему выходам третьего блока 14 преобразования координат и ко второму и третьему входам первого блока 8 преобразования координат соответственно, второй сумматор 20, второй вход которого соединен с выходом первого усилителя 15, и второй блок 21 умножения, соединенный выходом со вторым входом первого сумматора 17, последовательно соединенные второй усилитель 22, подключенный входом ко второму выходу пятого блока 19 преобразования координат, третий блок 23 умножения и третий сумматор 24, второй вход которого соединен с выходом первого регулятора 7 тока, а выход - с четвертым входом первого блока 8 преобразования координат, последовательно соединенные блок 25 возведения в третью степень, подключенный входом к выходу датчика 12 скорости ветра, нелинейный элемент 26, первый квадратор 27, четвертый сумматор 28, блок 29 извлечения квадратного корня и управляемый электронный ключ 30, соединенный выходом с первым входом первого элемента 6 сравнения, второй вход которого подключен к выходу второго сумматора 20, последовательно соединенные задатчик 31 напряжения, второй элемент 32 сравнения, второй вход которого подключен к первому выходу третьего блока 14 преобразования координат, регулятор 33 напряжения, второй квадратор 34, пятый сумматор 35, подключенный вторым входом к выходу первого квадратора 27, и компаратор 36, второй вход которого соединен с выходом задатчика 37 максимального тока и вторым входом четвертого сумматора 28, а выход - с управляющим входом управляемого электронного ключа 30, подключенного вторым силовым входом к выходу регулятора 33 напряжения, последовательно соединенные третий элемент 38 сравнения, подключенный первым входом к выходу нелинейного элемента 26, а вторым входом - к выходу второго усилителя 22, и второй регулятор 39 тока, соединенный выходом с третьим входом первого сумматора 17, последовательно соединенные задатчик 40 частоты тока статора и шестой сумматор 41, второй вход которого соединен с выходом датчика 11 частоты вращения, а выход - со вторыми входами первого 16, второго 21 и третьего 23 блоков умножения, причем пятый и шестой входы первого блока 8 преобразования координат соединены с соответствующими выходами формирователя 5 гармонических функций частоты скольжения, а три его выхода - с тремя управляющими входами преобразователя частоты 1, который получает питание от трехфазной сети 3.
На чертеже введены следующие обозначения:
I1x, I1y, I2x, I2y - проекции токов статора и ротора на соответствующие оси координат;
Ux, Uy - проекции управляющих сигналов;
Ukx, Uky - проекции скорректированных управляющих сигналов;
U1m - амплитуда напряжения статора;
Ψ1m - амплитуда потокосцепления статора;
Iзx, Iзy - проекции задающего тока ротора на оси координат x и y;
ε1,ε2,ε3 - сигналы ошибок;
Iз 2 - квадрат результирующего задающего тока;
Iзmax 2 - квадрат максимально допустимого тока;
Uз - задающий сигнал напряжения сети;
v - скорость ветра;
ω - частота вращения ротора;
ω1,ω2 - частоты токов статора и ротора.
Устройство работает следующим образом.
Статор асинхронизированного синхронного генератора 2 работает на трехфазную сеть 3 переменного тока. Напряжение в его роторную обмотку подают от преобразователя частоты 1, который получает питание от этой сети 3.
Очевидно, что в процессе работы ветроэнергетической установки происходит постоянное изменение мощности ветрового потока. В то же время мощность, вырабатываемая установкой, с одной стороны, не должна превышать мощность ветрового потока (для предотвращения остановки ветроколеса), а с другой стороны, не должна превышать максимально допустимого для ее генератора значения, даже если мощность ветрового потока велика. Особенностью ветроэнергетических установок, построенных на основе асинхронизированных синхронных генераторов, является возможность вырабатывать как активную, так и реактивную мощность. Поэтому для более полного использования энергии ветра необходимо изменять активную и реактивную мощность, вырабатываемую такой установкой, подстраиваясь под текущее значение мощности ветрового потока. Однако изменение вырабатываемой мощности вызывает изменение токов в электрических сетях, что приводит к изменению падений напряжения на активных и реактивных сопротивлениях сетей и линий электропередач, соединяющих маломощные (сельские) сети с источниками энергии. Это в конечном итоге приводит к изменению напряжения в этих маломощных сетях. А поскольку реактивное сопротивление линий электропередач больше активного, то, изменяя реактивную мощность, вырабатываемую ветроэнергетической установкой, можно эффективно стабилизировать напряжение в этой маломощной сети переменного тока. Для изменения активной и реактивной мощности необходимо изменять активный и реактивный токи статора. Однако между токами статора и ротора асинхронизированного синхронного генератора существует однозначная связь, поэтому для изменения активной и реактивной мощности ветроэнергетической установки необходимо изменять активный и реактивный токи ротора с помощью преобразователя частоты, включенного в роторную цепь генератора. В то же время на качество управления активным и реактивным токами ротора, а следовательно, активной и реактивной мощностью влияют изменяющаяся частота вращения ротора и изменяющиеся переменные самого генератора, обусловленные наличием внутренних связей. Поэтому для повышения качества управления мощностью необходимо компенсировать указанное влияние.
Для определения управляющих сигналов, подаваемых на преобразователь частоты, рассматривают дифференциальные уравнения, описывающие работу асинхронизированного синхронного генератора 2 в проекциях на оси прямоугольной системы координат x, y, вращающейся с частотой тока статора ω1:



Ψ1x = I1x•L1+I2x•L12,
Ψ1y = I1y•L1+I2y•L12,
Ψ2x = I1x•L12+I2x•L2,
Ψ2y = I1y•L12+I2y•L2,
где U1x, U1y, U2x, U2y - проекции напряжений статора и ротора на соответствующие оси координат; Ψ1x,Ψ1y,Ψ2x,Ψ2y - проекции потокосцеплений статора и ротора на соответствующие оси координат; R1, R2 - активные сопротивления статорной и роторной обмоток соответственно; L1, L2 - индуктивности статорной и роторной обмоток соответственно; L12 - взаимная индуктивность статора и ротора; ω2 = ω1-pn•ω - частота тока ротора; pn - число пар полюсов.
Работа преобразователя частоты 1 в цепи ротора описывается следующими уравнениями:
где Ктп - коэффициент передачи преобразователя частоты; Ттп - постоянная времени преобразователя частоты.
Дифференциальные уравнения, описывающие совместную работу преобразователя частоты 1 и роторной цепи асинхронизированного синхронного генератора 2, имеют вид:

где k1= L12/L1 - коэффициент связи статора; L2'=(L1•L2-L12 2)/L1 - приведенная индуктивность.
Скорректированные управляющие сигналы Ukx и Uky формируют напряжение и ток роторной цепи асинхронизированного синхронного генератора 2, а следовательно, формируют напряжение и ток статорной цепи. При этом проекция I2x является реактивным током ротора, а проекция I2y - активным. Очевидно, что параметры уравнений (1), а следовательно, и проекции тока роторной цепи асинхронизированного синхронного генератора зависят от существенно изменяющейся в процессе работы ветроэнергетической установки частоты тока ротора ω2, которая в свою очередь зависит от частоты вращения ротора ω и изменяющихся переменных самого генератора, которые обусловлены наличием внутренних связей (проекций тока I2x, I2y и их производных, а также амплитуды потокосцепления статора Ψ1m). В результате для реализации поставленной выше задачи необходимо сформировать такое корректирующее устройство, которое позволяло бы стабилизировать напряжение в маломощной сети и обеспечить качественное управление вырабатываемой мощностью генератора за счет компенсации влияния всех перечисленных выше изменяющихся параметров.
Стабилизация напряжения и управление мощностью в данной заявке обеспечивается двумя следящими системами. Причем управление активной мощностью обеспечивается следящей системой по активному току ротора, а стабилизация напряжения и управление реактивной мощностью обеспечиваются двухконтурной следящей системой, внутренний контур которой управляет реактивным током ротора, а внешний стабилизирует напряжение в маломощной сети.
Задающий сигнал для внешнего контура стабилизации напряжения формируется задатчиком 31 напряжения в виде постоянного сигнала Uз, равного амплитуде напряжения сети в системе координат x и y. Реальный сигнал амплитуды напряжения U1m вычисляется следующим образом. Сначала с помощью датчика 10 измеряются значения трехфазных напряжений статора, затем с помощью блока 13 они преобразуются в двухфазные. После этого блок 14 преобразования координат вычисляет амплитуду напряжения статора U1m и вырабатывает гармонические сигналы sin(ω1•t) и cos(ω1•t) (подробнее работа подобных блоков описана в учебнике - Теория автоматизированного электропривода /Чиликин М.Г., Ключев В.И., Сандлер А.С. - М.: Энергия, 1979. - С. 431-438). Сигнал ошибки ε2 = Uз-U1m/ на выходе элемента 32 сравнения, скорректированный типовым регулятором 33 напряжения, является задающим сигналом Iзx для внутреннего контура управления реактивным током ротора. Это позволяет стабилизировать напряжение в сети за счет управления реактивной мощностью.
Задающий сигнал Iзy для следящей системы по активному току ротора, определяющий величину вырабатываемой активной мощности, как было сказано выше, определяется мощностью ветрового потока и ограничивается номинальной мощностью генератора. Этот сигнал формируется нелинейным элементом 26, имеющим следующую характеристику:
где kсв - коэффициент скорости ветра, рассчитываемый по паспортным данным ветроустановки и являющийся постоянным для конкретной установки; vном - номинальная скорость ветра; Iзyном - номинальный задающий сигнал активного тока ротора.
Известно, что задающий ток Iз не должен превышать своего максимального значения Iзmax (для предотвращения выхода из строя генератора). Так как сигнал Iзy ограничивается сигналом Iзyном, то результирующий задающий ток Iз может превысить свое максимальное значение Iзmax только за счет роста сигнала Iзx. Для устранения ситуации, когда значение Iз может превысить Iзmax, вводится ограничение на сигнал Iзx на уровне  (если Iз > Iзmax). Указанное ограничение сигнала Iзx осуществляется следующим образом. Первый отрицательный вход сумматора 28, его второй положительный вход, а также оба положительных входа сумматора 35 имеют единичные коэффициенты усиления. Задатчик 37 формирует сигнал Iз 2 max. В результате на выходе блока 29 извлечения квадратного корня формируется сигнал
(если Iз > Iзmax). Указанное ограничение сигнала Iзx осуществляется следующим образом. Первый отрицательный вход сумматора 28, его второй положительный вход, а также оба положительных входа сумматора 35 имеют единичные коэффициенты усиления. Задатчик 37 формирует сигнал Iз 2 max. В результате на выходе блока 29 извлечения квадратного корня формируется сигнал  . Компаратор 36 формирует ненулевой управляющий сигнал, если Iз 2 > Iз 2 max, и нулевой - в противном случае. Управляемый электронный ключ 30 работает следующим образом. Выход ключа 30 соединен с выходом регулятора 33 напряжения, если управляющий сигнал на выходе компаратора 36 нулевой, и соединен с выходом блока 29 извлечения квадратного корня в противном случае. В первом случае сигнал Iзx специально не ограничивается, а в последнем случае он ограничен на уровне Iзxmax.
. Компаратор 36 формирует ненулевой управляющий сигнал, если Iз 2 > Iз 2 max, и нулевой - в противном случае. Управляемый электронный ключ 30 работает следующим образом. Выход ключа 30 соединен с выходом регулятора 33 напряжения, если управляющий сигнал на выходе компаратора 36 нулевой, и соединен с выходом блока 29 извлечения квадратного корня в противном случае. В первом случае сигнал Iзx специально не ограничивается, а в последнем случае он ограничен на уровне Iзxmax.
Реальные текущие значения сигналов токов ротора I2x и I2y вычисляют следующим образом.
Измеренные датчиком 9 значения трехфазных токов статора сначала преобразуются блоком 18 преобразования координат в двухфазные, а затем блоком 19 преобразования координат - в их проекции на оси координат x, y с использованием сигналов sin(ω1•t) и cos(ω1•t), поступающих с блока 14 преобразования координат (подробнее работа подобных блоков описана в учебнике - Теория автоматизированного электропривода /Чиликин М.Г., Ключев В.И., Сандлер А.С. - М.: Энергия, 1979. - С. 431-438).
Усилитель 15 имеет коэффициент усиления, равный  и на его выходе формируется сигнал
и на его выходе формируется сигнал  Усилитель 22 имеет коэффициент усиления, равный
Усилитель 22 имеет коэффициент усиления, равный  и на его выходе формируется реальный сигнал активного тока ротора
и на его выходе формируется реальный сигнал активного тока ротора 
Первый отрицательный вход второго сумматора 20 (со стороны пятого блока 19 преобразования координат) имеет коэффициент усиления, равный  а второй положительный (со стороны первого усилителя 15) - равный
а второй положительный (со стороны первого усилителя 15) - равный  В результате на его выходе формируется реальный сигнал реактивного тока ротора
В результате на его выходе формируется реальный сигнал реактивного тока ротора
Регуляторы 7 и 39 тока ротора являются типовыми. При этом сигнал Ux на выходе регулятора 7 обеспечивает стабилизацию напряжения в маломощной сети за счет управления реактивной мощностью, вырабатываемой ветроэнергетической установкой. Сигнал Uy на выходе регулятора 39 обеспечивает управление активной мощностью пропорционально кубу скорости ветра, т.е. пропорционально мощности ветрового потока. Однако для повышения качества управления активной и реактивной мощностью, как было сказано выше, необходимо скомпенсировать отрицательное влияние изменяющейся частоты вращения ротора и изменений внутренних переменных асинхронизированного синхронного генератора. Это осуществляется следующим образом.
Первый положительный вход сумматора 41 (со стороны задатчика 40 частоты тока статора) имеет единичный коэффициент усиления, а второй отрицательный вход (со стороны датчика 11 частоты вращения) имеет коэффициент усиления, равный pn. В результате на его выходе формируется сигнал ω2 = ω1-pn•ω.
Первый положительный вход сумматора 17 (со стороны блока 16 умножения) имеет коэффициент усиления, равный  второй положительный (со стороны блока 21 умножения) -
второй положительный (со стороны блока 21 умножения) -  а третий положительный (со стороны регулятора 39 тока), равный единице. В результате на его выходе формируется сигнал
а третий положительный (со стороны регулятора 39 тока), равный единице. В результате на его выходе формируется сигнал
Первый отрицательный вход сумматора 24 (со стороны блока 23 умножения) имеет коэффициент усиления, равный  а второй положительный (со стороны регулятора 7 тока), равный единице. В результате на его выходе формируется сигнал
а второй положительный (со стороны регулятора 7 тока), равный единице. В результате на его выходе формируется сигнал
Скорректированные управляющие сигналы Ukx и Uky поступают на входы блока 8 преобразования координат. Этот блок преобразует указанные управляющие сигналы из системы координат x, y в роторную трехфазную систему координат. При этом он использует информацию, поступающую с третьего блока 14 преобразования координат и с формирователя 5 гармонических функций частоты скольжения, который на основе информации, получаемой от датчика 4 углового положения ротора, вырабатывает сигналы sin(ϕэл) и cos(ϕэл), где ϕэл = - электрический угол поворота ротора относительно статора. Преобразованные сигналы с выхода блока 8 преобразования координат поступают на соответствующие управляющие входы преобразователя частоты 1, выходы которого подводятся к контактным кольцам ротора асинхронизированного синхронного генератора 2.
Управляющие сигналы Ukx (3) и Uky (2) обеспечивают компенсацию влияния изменяющейся частоты вращения ротора и изменяющихся внутренних переменных асинхронизированного синхронного генератора на качество регулирования вырабатываемой мощности. Эти сигналы превращают уравнения (1) с переменными параметрами в уравнения вида:
Как видно из уравнений (4), введенная коррекция обеспечивает компенсацию не всех изменяющихся переменных. Однако, как показали результаты проведенных исследований, влияние оставшихся нескомпенсированных переменных на качество регулирования вырабатываемой мощности незначительно и этими переменными вполне можно пренебречь.
Таким образом, за счет дополнительного введения второго 13, третьего 14, четвертого 18 и пятого 19 блоков преобразования координат, первого 15 и второго 22 усилителей, первого 16, второго 21 и третьего 23 блоков умножения, первого 17, второго 20, третьего 24, четвертого 28, пятого 35 и шестого 41 сумматоров, блока 25 возведения в третью степень, нелинейного элемента 26, первого 27 и второго 34 квадраторов, блока 29 извлечения квадратного корня, управляемого электронного ключа 30, задатчика 31 напряжения, второго 32 и третьего 38 элементов сравнения, регулятора 33 напряжения, компаратора 36, задатчика 37 максимального тока, второго регулятора 39 тока и задатчика 40 частоты тока статора удалось существенно повысить качество управления вырабатываемой активной и реактивной мощностью ветроэнергетической установки за счет компенсации вредного влияния изменяющихся частоты вращения ротора асинхронизированного синхронного генератора 2 и переменных самого генератора, а также стабилизировать напряжение в маломощной (сельской) сети переменного тока при изменении мощности ветрового потока.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2001 |
|
RU2189104C2 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1986 |
|
SU1399885A1 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1985 |
|
SU1304167A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1988 |
|
SU1534747A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Устройство для управления бесконтактной асинхронизированной синхронной машиной | 1989 |
|
SU1721787A1 |
| Устройство для управления электрической машиной с фазным ротором | 1977 |
|
SU720652A1 |
| Устройство для связи энергосистем | 1988 |
|
SU1669043A1 |
| Способ регулирования возбуждения асинхронизированной синхронной машины и устройство для его осуществления | 1991 |
|
SU1838871A3 |
Изобретение относится к электротехнике и может быть использовано в ветроэнергетических установках, работающих параллельно с сетью переменного тока. Техническим результатом является стабилизация напряжения в маломощной сети переменного тока при изменении мощности ветрового потока и повышение качества управления активной и реактивной мощностью, вырабатываемой ветроэнергетической установкой. В устройство для управления асинхронизированным синхронным генератором для формирования необходимых корректирующих сигналов введены блоки преобразования координат 13, 14, 18, 19, усилители 15, 22, блоки умножения 16, 21, 23, сумматоры 17, 20, 24, 28, 35, 41, блок 25 возведения в третью степень, нелинейный элемент 26, квадраторы 27, 34, блок 29 извлечения квдратного корня, управляемый электронный ключ 30, задатчик 31 напряжения, элементы сравнения 32, 38, регулятор 33 напряжения, компаратор 36, задатчик 37 максимального тока, регулятор 39 тока и задатчик 40 частоты тока статора. Введение коррекции позволяет повысить качество управления вырабатываемой активной и реактивной мощностью ветроэнергетической установки. 1 ил.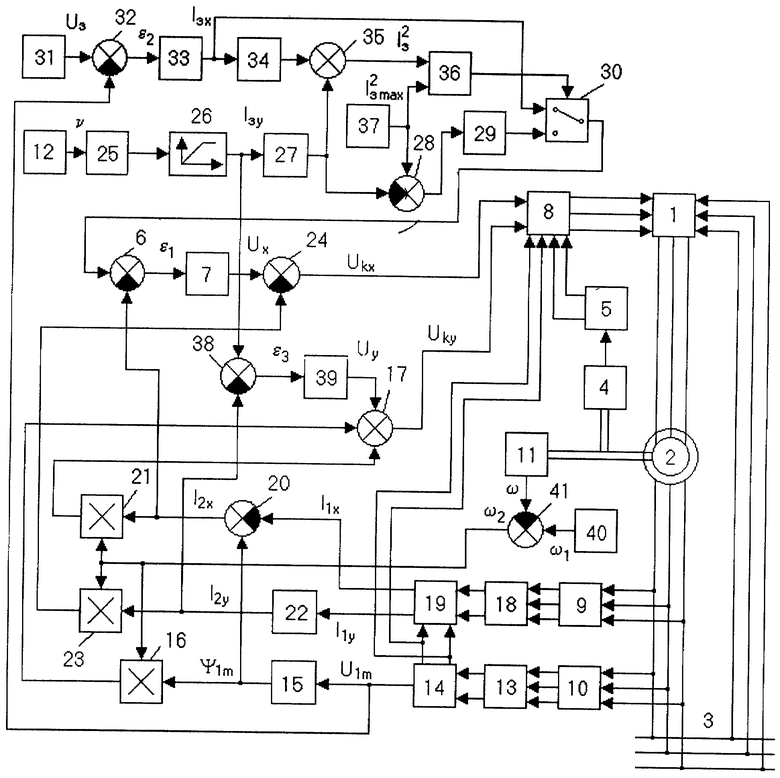
Устройство для управления асинхронизированным синхронным генератором, содержащее преобразователь частоты, подключенный выходом к роторной цепи асинхронизированного синхронного генератора, статорная цепь которого подключена к трехфазной сети, последовательно соединенные датчик углового положения ротора, непосредственно связанный с ротором асинхронизированного синхронного генератора и формирователь гармонических функций частоты скольжения, последовательно соединенные первый элемент сравнения и первый регулятор тока, а также первый блок преобразования координат, который преобразует скорректированные управляющие сигналы, поступающие на его входы, из системы координат x, y в роторную трехфазную систему координат, датчики тока и напряжения статорной цепи, датчик частоты вращения, непосредственно связанный с ротором асинхронизированного синхронного генератора и датчик скорости ветра, отличающееся тем, что в него дополнительно вводятся последовательно соединенные второй блок преобразования координат, подключенный тремя входами к трем соответствующим выходам датчика напряжения статорной цепи и преобразующий трехфазные напряжения статора в двухфазные, третий блок преобразования координат, который вычисляет амплитуду напряжения статора и вырабатывает гармонические сигналы sin(ω1•t) и cos(ω1•t), первый усилитель, первый блок умножения и первый сумматор, подключенный выходом к первому входу первого блока преобразования координат, последовательно соединенные четвертый блок преобразования координат, подключенный тремя входами к трем соответствующим выходам датчика тока статорной цепи и преобразующий трехфазные токи статора в двухфазные, пятый блок преобразования координат, преобразующий двухфазные токи статора в их проекции на оси координат x, y, третий и четвертый входы которого подключены ко второму и третьему выходам третьего блока преобразования координат и - ко второму и третьему входам первого блока преобразования координат соответственно, второй сумматор, второй вход которого соединен с выходом первого усилителя, и второй блок умножения, соединенный выходом со вторым входом первого сумматора, последовательно соединенные второй усилитель, подключенный входом ко второму выходу пятого блока преобразования координат, третий блок умножения и третий сумматор, второй вход которого соединен с выходом первого регулятора тока, а выход - с четвертым входом первого блока преобразования координат, последовательно соединенные блок возведения в третью степень, подключенный входом к выходу датчика скорости ветра, нелинейный элемент, который представляет собой усилитель положительных входных сигналов с зоной насыщения, первый квадратор, четвертый сумматор, блок извлечения квадратного корня и управляемый электронный ключ, соединенный выходом с первым входом первого элемента сравнения, второй вход которого подключен к выходу второго сумматора, последовательно соединенные задатчик напряжения, второй элемент сравнения, второй вход которого подключен к первому выходу третьего блока преобразования координат, регулятор напряжения, второй квадратор, пятый сумматор, подключенный вторым входом к выходу первого квадратора, и компаратор, второй вход которого соединен с выходом задатчика максимального тока и вторым входом четвертого сумматора, а выход - с управляющим входом управляемого электронного ключа, подключенного вторым силовым входом к выходу регулятора напряжения, последовательно соединенные третий элемент сравнения, подключенный первым входом к выходу нелинейного элемента, а вторым входом - к выходу второго усилителя, и второй регулятор тока, соединенный выходом с третьим входом первого сумматора, последовательно соединенные задатчик частоты тока статора и шестой сумматор, второй вход которого соединен с выходом датчика частоты вращения, а выход - со вторыми входами первого, второго и третьего блоков умножения, причем пятый и шестой входы первого блока преобразования координат соединены с соответствующими выходами формирователя гармонических функций частоты скольжения, а три его выхода - с тремя управляющими входами преобразователя частоты, который получает питание от трехфазной сети.
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1986 |
|
SU1399885A1 |
| RU 94036292/07 A1, 27.07.1996 | |||
| Устройство для автоматического учета числа бадей с углем, погруженных на паровоз | 1928 |
|
SU10304A1 |
| Асинхронизированный синхронный генератор | 1984 |
|
SU1259467A1 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1988 |
|
SU1534747A1 |
| US 3859578 А, 07.01.1976 | |||
| Способ очистки газов | 1988 |
|
SU1563740A1 |
