Изобретение относится к электротехнике и может быть использовано в электрических машинах переменного тока, условия работы которых не позволяют использовать узлы скользящего токосъема, в частности, для управления бесконтактными асинхро- низированными синхронными машинами, работающими в переувлажненных, запыленных и других подобных средах, а также в сверхмощных и высокогорных установках. Преимущественная область применения - устройства для управления бесконтактными асинхронизированными синхронными машинами, работающими в составе ветроэнергетических установок, электроприводов дутьевых вентиляторов или других зналогичных им установок, в которых может быть использована информация о скорости ветра, функционально связанная с каким либо из параметров рабочего режима, например, частотой вращения, моментом и т.д.
Цель изобретения - увеличение КПД бесконтактной асинхронизированной синхронной машины.
Поставленная цель достигается за счет повышения использования бесконтактной асинхронизированной синхронной машины по моменту при работе с нагрузочными или механическими характеристиками вида М Со + CiV2, где М - момент; V - скорость ветра; Со и d - постоянные регулирования.
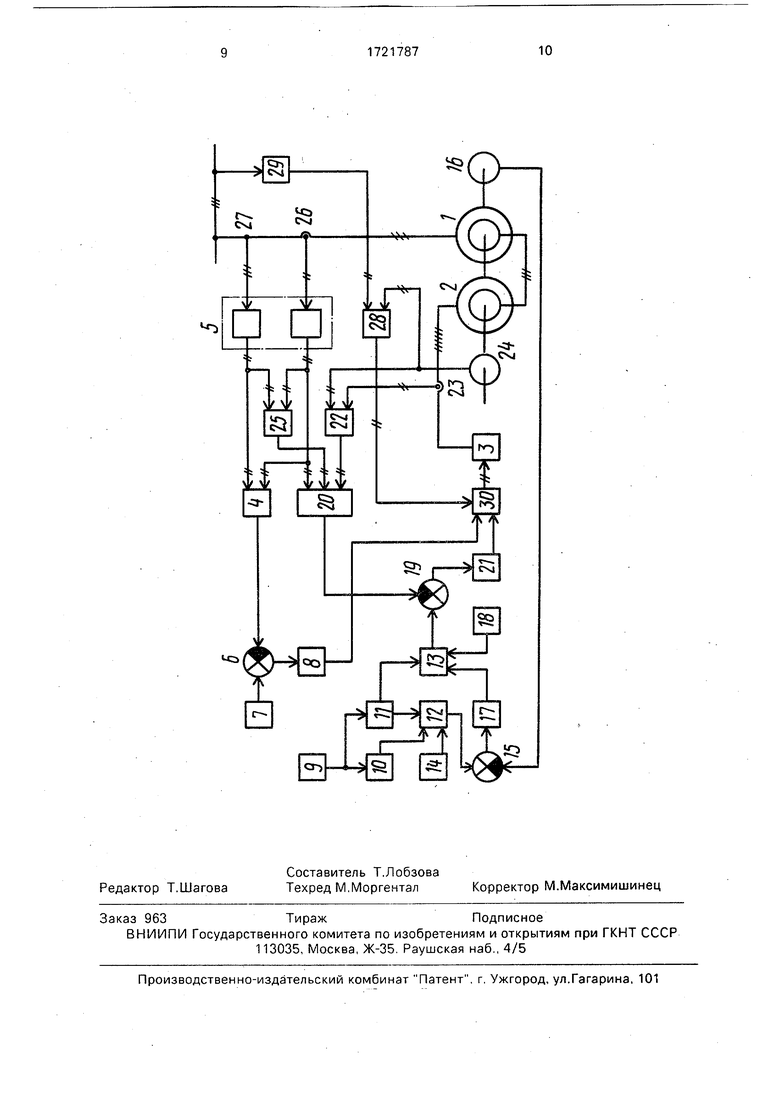
На чертеже представлена блок-схема устройства для управления бесконтактной асинхронизированной синхронной машиной.
Устройство для управления бесконтакт- ной асинхронизированной синхронной машиной, содержащее первый статор 1, непосредственно подключенный к сети переменного тока, второй статор 2, подключенный к сети переменного тока через преобразователь 3 частоты, и электрически соединенные роторы, размещенные на общем валу, имеет два канала регулирования - реактивной мощности и частоты вращения, Канал регулирования реактивной мощности содержит датчик 4 реактивной мощности, входы которого соединены с группами выходов потоку и напряжению первого преобразователя 5 координат, а выход - с первым входом первого элемента 6 сравнения, вто- рой вход которого соединен с задатчиком 7 реактивной мощности, а выход подключен к входу регулятора 8 реактивной мощности. Канал регулирования частоты вращения содержит датчик 9 скорости ветра, выход ко- торого соединен с входом масштабного усилителя 10 и входом двухпорогового компаратора 11, первый выход которого подключен к управляемому входу первого блока 12 коммутации, а второй выход - к управляемому входу второго блока 13 коммутации, Первый коммутируемый вход первого блока 12 коммутации соединен с выходом задатчика 14 частоты вращения, второй коммутируемый вход - с выходом масштабного усилителя 10, а выход - с вторым входом второго элемента 15сравнения, первый вход которого соединен с выходом датчика 6 частоты вращения, а выход - с входом регулятора 17 частоты вращения, выход которого подключен к первому коммутируемому входу второго блока 13 коммутации, второй коммутируемый вход которого соединен с выходом задатчика 18 момента, а выход - с вторым входом третьего элемента 19 сравнения, первый вход которого соединен с выходом формирователя 20 момента, а выход подключен к входу регулятора 21 момента. Устройство содержит также формирователь 11 проекций тока второго статора 2, входы которого соединены с выходами датчика 23 тока второго статора 2 и датчика 24 углового положения ротора, а выходы подключены к входам формирователя момента 20, другие входы которого соединены с группой выходов по току первого преобразователя 5 координат и выходами формирователя 25 проекций тока ротора, входы которого соединены с группами выходов по току и напряжению первого преобразователя 5 координат, датчики тока 26 и напряжения 27 первого статора 1, выходы которых соединены с входами первого преобразователя 5 координат, формирователь 28 гармонических функций частоты скольжения, входы которого соединены с выходами датчика 29 частоты сети и датчика 24 углового положения ротора, и второй преобразователь 30 координат, входы которого соединены с выходом регулятора 8 реактивной мощности, выходом регулятора 21 момента и выходами формирователя 28 гармонических функций частоты скольжения, а выходы предназначены для подключения к управляющим входам преобразователя 3 частоты.
Устройство работает следующим образом.
В канале регулирования реактивной мощности сигнал СЬад задания по реактивной мощности (выходной сигнал задатчика 7) сравнивается на первом элементе 6 сравнения с истинным значением Q реактивной мощности, получаемым от датчика 4 реактивной мощности. Результирующий сигнал отрабатывается регулятором 8 реактивной мощности и с выхода последнего через второй преобразователь 30 координат поступает на вход преобразователя 3 частоты. Таким образом, рассогласование появившееся на выходе первого элемента 6 сравнения в результате неравенства сигналов Q и Озад, приводит к изменению модуля и фазы напряжения, подводимого к обмоткам второго статора 2 с выхода преобразователя 3 частоты, и установлению нового режима по реактивной мощности (или восстановлению заданного).
В зависимости от текущего значения скорости ветра в канале регулирования частоты вращения предусмотрена возможность изменения его структуры, что позволяет формировать соответствующий сигнал управления, обеспечивающий работу бесконтактной асинхронизированной
синхронной машины в трех следующих режимах: с постоянной частотой вращения, с вентиляторной характеристикой и с постоянным моментом. В нижнем рабочем диапазоне скоростей ветра, в котором должно обеспечиваться постоянство частоты вращения, сигналы на выходах двухпорогового компаратора 11, осуществляющего управление блоками 12 и 13 коммутации, равны нулю. При этом выход задатчика 14 частоты вращения, сигнал которого пропорционален минимальной рабочей частоте вращения бесконтактной асинхронизированной синхронной машины, подключен к второму входу второго элемента 15 сравнения через первый блок 12 коммутации, а выход регулятора 17 частоты вращения подключен к второму входу третьего элемента 19 сравнения через второй блок 13 коммутации. Блоки 12 и 13 коммутации представляют собой управляемые электронные ключи, замыкание (размыкание) которых осуществляется в зависимости от наличия сигналов, поступающих на их управляемые входы с выходов двухпорогового компаратора 11. При изменении вращающего момента на валу бесконтактной асинхронизированной синхронной машины (обусловленном колебаниями скорости ветра или нагрузки) ее частота вращения отклоняется от заданного значения. При этом на выходе второго элемента 15 сравнения появляется сигнал рассогласования, который отрабатывается регулятором 17 частоты вращения. Сигнал с выхода регулятора 17 является заданием по моменту и через второй блок 13 коммутации поступает на второй вход третьего элемента 19 сравнения, где сравнивается с истинным значением момента, получаемым от формирователя 20 момента. Рассогласование указанных сигналов отрабатывается регулятором 21 момента, а результирующий сигнал через второй преобразователь 30 координат поступает на вход преобразователя 3 частоты, выходы которого подключе- ны к обмоткам второго статора 2. Переходный процесс заканчивается установлением заданного значения частоты вращения, а на выходах элементов 15 и 19 сравнения восстанавливается нулевой сигнал. По достижении значения скорости ветра, равного нижней границе среднего рабочего диапазона (в котором должна обеспечиваться работа с вентиляторной характеристикой вида М CW2, на первом выходе двухпорогового компаратора 11 формируется сигнал управления, поступающий на управляемый вход первого блока 12 коммутации. При этом происходит переключение второго входа второго элемента 15
сравнения с выхода задатчика 14 частоты вращения к выходу масштабного усилителя 10. На втором выходу двухпорогового компаратора 11 сохраняется нулевой сигнал, а
выход регулятора 17 частоты вращения по- прежнему подключен к второму входу третьего элемента 19 сравнения через второй блок 13 коммутации. При дальнейшем возрастании скорости ветра с выхода масштаб0 ного усилителя 10 через первый блок 12 коммутации на второй вход второго элемента 15 сравнения поступает сигнал, пропорциональный KV, где К - коэффициент усиления; V - текущее значение скорости
5 ветра. На первый вход второго элемента 15 сравнения с выхода датчика 16 частоты вращения поступает сигнал, пропорциональный текущему значению частоты вращения бесконтактной асинхронизированной синх0 ронной машины. Сигнал рассогласования отрабатывается регулятором 17 частоты вращения, а с выхода последнего через второй блок 13 коммутации поступает на второй вход третьего элемента 19 сравнения,
5 где сравнивается с истинным значением момента, получаемым от формирователя 20 момента. Дальнейшая работа аналогична описанной выше, т.е. отработка указанного рассогласования продолжается до момента
0 установления нового значения частоты вращения, пропорционального значения К. Соответствующим выбором коэффициента К усиления при настройке масштабного усилителя 10 можно получить любую заданную
5 крутизну (постоянную регулирования Ci) вентиляторной характеристики и обеспечить оптимальное использование бесконтактной асинхронизированной синхронной машины по моменту. При достижении ско0 рости ветра значения, равного нижней границе верхнего рабочего диапазона (в котором должно обеспечиваться постоянство момента М Со), на второмвыходе двухпорогового компаратора 11 формируется
5 сигнал управления, поступающий на управляемый вход второго блока 13 коммутации. При этом происходит переключение второго входа третьего элемента 19 сравнения с выхода регулятора 17 частоты вращения к вы0 ходу задатчика 18 момента, В верхнем диапазоне скоростей ветра сигнал Со задания по моменту (выходной сигнал задатчика 18 момента) сравнивается на третьем элементе 19 сравнения с истинным значением
5 М момента, получаемым от формирователя 20 момента, а результирующий сигнал отрабатывается регулятором 21 момента. Соответствующей настройкой задатчика 18 (выбором постоянной регулирования Со) можно обеспечить работу бесконтактной
асинхронизированной синхронной машины в любом заданном (расчетном) режиме , что позволяет получить ее высокое использование, а также исключить перегрузку по моменту. Указанная совокупность режимов позволяет расширить рабочие диапазоны скоростей ветра и частоты вращения, получить оптимальное использование бесконтактной асинхронизированной синхронной машины по моменту при работе с нагрузочными или механическими характеристиками вида M Co+CiV2 и повысить тем самым ее КПД. Таким образом, применение устройства обеспечивает увеличение выработки электроэнергии в генераторном режиме (например, при работе машины в составе ветроэнергетической установки) и снижение ее потребления в двигательном режиме (например, при работе машины в качестве электропривода дутьевого вентилятора).
Формула изобретения Устройство для управления бесконтактной асинхронизированной синхронной машиной, содержащее датчик реактивной мощности, входы которого соединены с группами выходов по току и напряжению первого преобразователя координат, а выход - с первым входом первого элемента сравнения, второй вход которого соединен с задатчиком реактивной мощности, а выход подключен к входу регулятора реактивной мощности, задатчик частоты вращения, датчик частоты вращения, выход которого соединен с первым входом второго элемента сравнения, выход которого подключен к входу регулятора частоты вращения, третий элемент сравнения, первый вход которого соединен с выходом формирователя момента, а выход подключен к входу регулятора момента, формирователь проекций тока второго статора, входы которого соединены с выходами датчика тока второго статора и датчика углового положения ротора, а выходы подключе- ны к одним из входов формирователя
момента, другие входы которого соединены с группой выходов по току первого преобразователя координат и выходами формирователя проекций тока ротора, входы которого
соединены с группами выходов по току и напряжению первого преобразователя координат, датчики тока и напряжения первого статора, выходы которых соединены с соответствующими входами первого преобразователя координат, формирователь гармонических функций частоты скольжения, входы которого соединены с выходами датчика частоты сети и датчика углового положения ротора, второй преобразователь
координат, соответствующие входы которого соединены с выходом регулятора реактивной мощности, выходом регулятора момента и выходами формирователя гармонических функций частоты скольжения, а
выходы - с выводами для подключения управляющих входов преобразователя частоты, отличающееся тем, что, с целью увеличения КПД бесконтактной асинхронизированной синхронной машины, оно снабжено датчиком скорости ветра, масштабным усилителем, двухпороговым компаратором, двумя блоками коммутации и задатчиком момента, причем первый коммутируемый вход первого блока коммутации соединен с выходом задатчика частоты вращения, второй коммутируемый вход - с выходом масштабного усилителя, а выход подключен к второму входу второго элемента сравнения, первый коммутируемый вход
второго блока коммутации соединен с выходом регулятора частоты вращения, второй коммутируемый вход - с выходом задатчика момента, а выход подключен к второму входу третьего элемента сравнения, выход датчика скорости ветра соединен с входом масштабного усилителя и входом двухпоро- гового компаратора, первый выход которого подключен к управляемому входу первого блока коммутации, а второй выход - к управляемому входу второго блока коммутации.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1986 |
|
SU1399885A1 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1988 |
|
SU1534747A1 |
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1985 |
|
SU1304167A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| Устройство для управления асинхронизированной синхронной машиной | 1980 |
|
SU877765A1 |
| Устройство для управления асинхронизированной синхронной машиной | 1985 |
|
SU1288885A1 |
| Устройство для управления асинхронизированной синхронной машиной | 1984 |
|
SU1314429A1 |
| Устройство для связи двух энергосистем | 1978 |
|
SU771796A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2231208C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2468251C1 |
Изобретение относится к электротехнике и может быть использовано в электрических машинах переменного тока, условия работы которых не позволяют использовать узлы скользящего токосьема, в частности для управления бесконтактными асинхро- низированными синхронными машинами, работающими в переувлажненных, запыленных и других подобных средах, а также в сверхмощных и высокогорных установках. Цель изобретения - увеличение КПД бесконтактной асинхронизированной синхронной машины при работе с нагрузочными или механическими характеристиками вида М Со - CiV , где М - момент; V - скорость ветра; Со и Ci - постоянные регулирования. Устройство содержит два канала регулирования - реактивной мощности и частоты вращения. Канал регулирования частоты вращения снабжен датчиком 9 скорости ветра, масштабным усилителем 10,двухпорого- вым компаратором 11, двумя блоками 12 и 13 коммутации и задатчиком 18 момента. Первый коммутируемый вход первого блока 12коммутации соединен с выходом задат- чика 14 частоты вращения, второй коммутируемый вход - с выходом масштабного усилителя 10, а выход подключен к второму входу второго элемента 15 сравнения. Первый коммутируемый вход второго блока 13 коммутации соединен с выходом регулятора 17 частоты вращения, второй коммутируемый вход-с выходом задатчика 18 момента, а выход подколючен к второму входу третьего элемента 19 сравнения. Выход датчика 9 скорости ветра соединен с выходом масштабного усилителя 10 и входом двухпорого- вого компаратора 11, первый выход которого подключен к управляемому входу первого блока 12 коммутации, а второй выход - к управляемому входу второго блока 13коммутации. 1 ил. ё VI ю VI 00 VJ
| Устройство для управления асинхронизированным синхронным генератором ветроэнергетической установки | 1988 |
|
SU1534747A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления электри-чЕСКОй МАшиНОй пЕРЕМЕННОгО TOKA | 1978 |
|
SU815854A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
