, 1
Изобретение относится к области электропривода, в частности, к электроприводу с асинхронной машиной с фазным ротором при питанид статора от промышленной ceTij. Изобретение может быть использовано в автоматизированном электроприводе различных механизмов, в системах регулирований асинхронизированных синхронных генераторов и компенсаторов.
Известны устройства для управления асинхронной машиной с фазным ротором 1
Известные устройства содержат датчики составляющих токов ротора в осях ей q и измерители фазных токов ротОра применение которых в случаях, например, высоковольтных обмоток ротора, представляет сложную техническую задачу, что является недостатком этих устройств.
Известны устройства для управления асинхронной машиной с фазным ротором, содержащие датчики фазных токов и напряжений статора, датчики составляющих ЭДС ротора, датчик скорости, датчик напряжения опорного вектора и датчик, составляющих тока статора, включенный в контур регулирования токов статора 2.
В известных устройствах из-за наличия контура регулирования токов статора не удается получить высокой точности регулирования параметров асинхронной машины, при этом устройства оказываются достаточно сложными, что и является их недостатком.
10
Целью изобретения являются упрощение устройства и получение высокой точности регулирования параметров , машины за счет формирования параметров регулирования в цепи ротора на основе измерения 5 параметров статорпотл цепи машины.
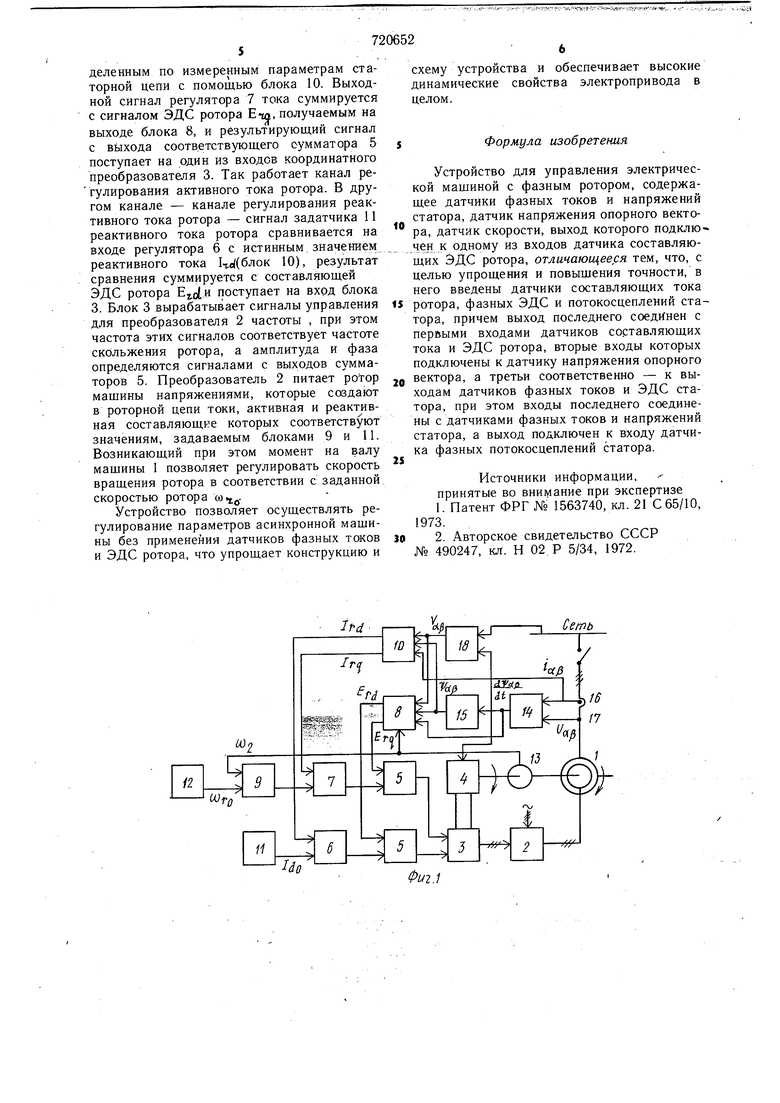
Для этого в устройство введены датчики составляющих тока ротора, фазных ЭДС и потокосцеплений статора, причем выход по2Q следнего соединен с первыми входами датчиков составляющих тока и ЭДС ротора, вторые входы которых подключены к датчику напряжения опорного вектора, а третьи соответственно- - к выходам датчиков фазных токов и ЭДС статора, при этом входы последнего соединены с датчиками фазных токов и напряжений статора, а выход подключен к входу датчика фазных потокосцеплений статора. -На фиг. 1 представлена структурная схема устройства для управления асинхронной машиной с фазным ротором; на фиг. 2 - структурная схема блока 8; на фиг. 3 - структурная схема блока 10.
Устройство содержит асинхронную машину 1, преобразователь 2 частоты для питания фазных обмоток ротора машины, координатный преобразователь 3, датчик 4 углового положения ротора, сумматоры 5, регулятор 6 реактивногЬ тока ротора, регу- . лятор 7 активного тока ротора, датчик 8 составляющих ЭДС ротора И , регулятор 9 скорости ротора ма, датчик 10 составляющих тока ротора и , задатчик 11 реактивного тока ротора Ido, задатчик 12 скорости ротора , датчик 13 скррости ротора ш, датчик 14 фазных ЭДС статора Л- датчик 15 фазных потокосцепл&ний статора сС/: датчик 16 фазных токов статора i, датчик 17 фазных напряжений статора U, датчик 18 напряжений опорного вектора .
Статорная обмотка мащины 1 подключена к сети, а роторная - к преобразователю 2 частоты. Управление преобразователем 2 частоты осуществляется сигналами, поступающими с выхода координатного преобразователя 3. К входам блока 3 подключены выходы датчика 4 и выходы сумматоров 5, к входам которых подключены выходы регуляторов 6-7 составляющих тока ротора в синхронно вращающихся осях d и q Кроме того, к входам сумматоров 5 подключены выходы датчика 8 составляющих ЭДС ротора в этих же осях. Вход регулятора 7 тока ротора по оси q соединен с выходом регулятора 9 скорости и с соответствующим выходом датчика 10. Вход регулятора 6 соединен с выходом задатчика 11, на выходе которого формируется сигнал задания реактивного тока (мощности) Ы. Входы регулятора 9 подключены к выходам датчика 13 скорости и задатчика 12 скорости. Датчик Г8 напряжений опорного вектора подключен к питающей сети, а его выходы соединены с датчиком 4 угла и с входами датчиков 8 и 10. Блок 14 подключен к выходам датчиков 16 и 17 фазных токов и напряжений. Датчики 16-18 формируют сигналы в осях U и /, неподвижных в пространстве и связанных со статором мащины 1. Датчик 14 формирует производные фазных потокосцеплений статора в осях а и / - фазные ЭДС статора, наводимые фазными
потокосцеплениями статора - согласно выражению:
А ..
krV
dt
где Ufд i и/1,,соответственно фазные
напряжения, токи и пото,,. ,л .. V косцепления статора в
.,осях а и у5.
г -активное сопротивление фазы статора.
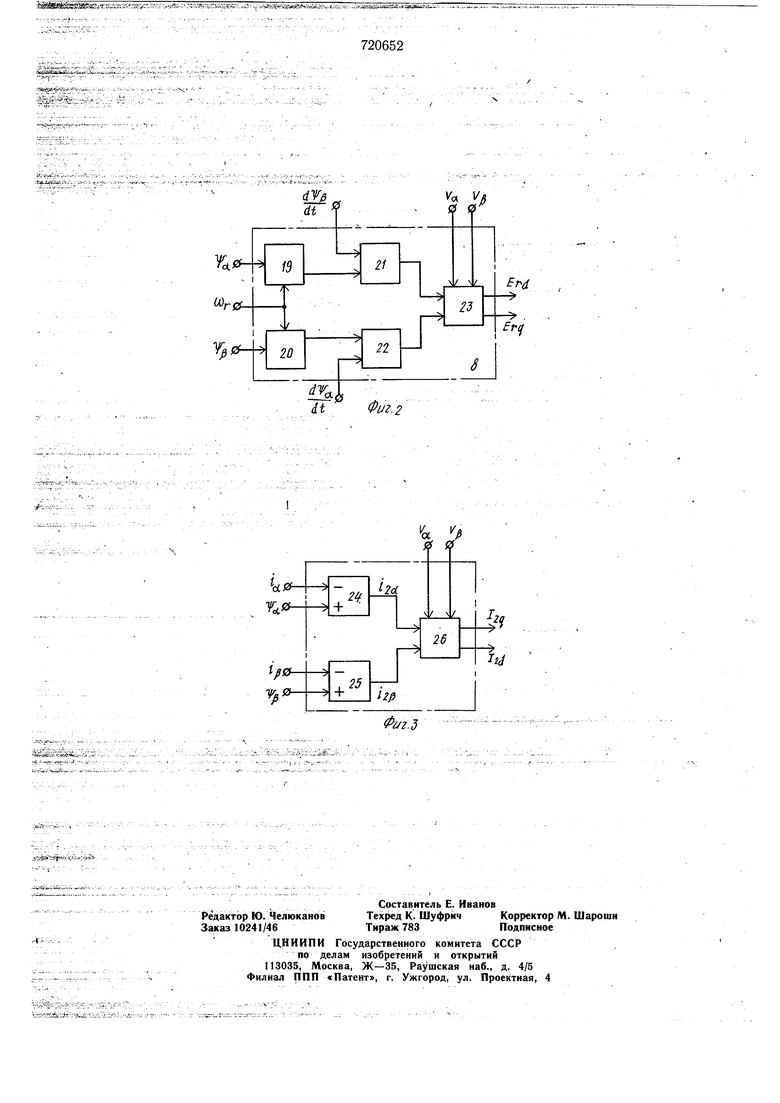
Датчик 14 содержит сумматор , на вход которого подаются ток и напряжение статора с соответствующими коэс})фициентами. Датчик 15 фазных потокосцеплений статора формирует сигнал на своем выходе согласно выражению
U. flA
dt
Ц8 J dt
Этот датчик реализуется на основе интегрирующего усилителя. Датчик 8 составляющих ЭДС ротора в осях d и g формирует сигналы на своих выходах в соответствии со структурной схемой (фиг. 2) и состоит из множительных элементов 19-20; .сумматоров 21-22, блока 23 преобразования координат. На входы датчика 8 поступают фазные значения 1ic и V потокосцеплений статора, фазные значения ЭДС статора ( - и ) фазные напряжения V и Уд датчика 18 и сигнал (0 от датчика 13 скорости. Коэффициенты передачи блоков 19-23 выбираются, исходя из реальных параметров асинхронной мащины 1 на основе известных уравнений для составляющих ЭДС ротора, записанных через фазные ЭДС и потокосцепления статора. На фиг. 3 показана структурная схема блока 10, содержащего вычитатели 24-25 и преобразователь 26 координат. Оси d и q, относительно которых определяются составляющие тока и ЭДС, а. также угловое положение ротора, приняты совпадающими с опорным вектором датчика 18, который может быть подключен либо непосредственно к сети, либо к сети через систему телепердачи (для генератора и компенсатора), либо непосредственно к зажимам статора мащииы 1.
Устройство для управления мащиной работает следующим образом.
Сигнал задатчика 12 скорости ротора сравнивается с сигналом датчика 13 скорости, рассогласование этих сигналов отрабатывается регулятором 9 скорости и сигнал этого регулятора является сигналом задания на активную составляющую тока ротора. Этот сигнал сравнивается в блоке 7 с истинным значением тока ротора It, определенным по измеренным параметрам статорной цепи с помощью блока 10. Выходной сигнал регулятора 7 тока суммируется с сигналом ЭДС ротора Е-м, получаемым на выходе блока 8, и результирующий сигнал с вьтхода соотв.етствующего сумматора 5 поступает на один из входов координатного преобразователя 3. Так работает канал регулирования активного тока ротора. В другом канале - канале регулирования реактивного тока ротора - сигнал задатчика 11 реактивного тока ротора сравнивается на входе регулятора 6 с истинным значением реактивного тока 1т.е(блок 10), результат сравнения суммируется с составляющей ЭДС ротора поступает на вход блока 3. Блок 3 вырабатывает сигналы управления для преобразователя 2 частоты , при этом частота этих сигналов соответствует частоте скбльжения ротора, а амплитуда и фаза определяются сигналами с выходов сумматоров 5. Преобразователь 2 питает ротор машины напряжениями, которые создают в роторной цепи токи, активная и реактивная составляющие которых соответствуют значениям, задаваемым блоками 9 и 11. Возникающий при этом момент на валу машины 1 позволяет регулировать скорость вращения ротора в соответствии с заданной скоростью ротора со. Устройство позволяет осуществлять регулирование параметров асинхронной машины без применения датчиков фазных токов и ЭДС ротора, что упрощает конструкцию и схему устройства и обеспечивает высокие динамические свойства электропривода в целом. Формула изобретения Устройство для управления электрической машиной с фазным ротором, содержащее датчики фазных токов и напряжений статора, датчик напряжения опорного вектора, датчик скорости, выход которого подклю чен к одному из входов датчика составляющих ЭДС ротора, отличающееся тем, что, с целью упрощения и повыщения точности, в него введены датчики составляющих тока ротора, фазных ЭДС и потокосцеплений статора, причем выход последнего соединен с первыми входами датчиков составляющих тока и ЭДС ротора, вторые входы которых подключены к датчику напряжения опорного вектора, а третьи соответственно - к выходам датчиков фазных токов и ЭДС статора, при этом входы последнего соединены с датчиками фазных токов и напряжений статора, а выход подключен к входу датчика фазных потокосцеплений статора. Источники информации, принятые во внимание при экспертизе 1.Патент ФРГ Ко 1563740, кл. 21 С 65/10, 1973. 2,Авторское свидетельство СССР № 490247, кл. Н 02 Р 5/34, 1972.
isiiKaaKti:iii -i :.rs;S);-i -::j-i4
720652
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Электропривод переменного тока | 1984 |
|
SU1220100A2 |
| Электропривод переменного тока | 1990 |
|
SU1750015A1 |
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
4Il
J di
V Vj 0 «9
&-Ы
Шг0.
r,0fr-d
Eftf
s
ItФиг.2
