Изобретение относится к машиностроению и может быть использовано в передаточных механизмах для преобразования вращательного движения в поступательное с заданным законом перемещения.
Известен кулачковый механизм [1], содержащий кулачок и толкатель, взаимодействующий с кулачком посредством промежуточного ролика, рабочая поверхность которого выполнена в форме конуса и ее образующая расположена по отношению к боковой поверхности кулачка под углом 10o-60o.
Ролик установлен так, что его рабочая поверхность взаимодействует с ребром, образованным пересечением поверхности профиля с боковой поверхностью кулачка.
Указанный аналог относится к плоским кулачковым механизмам. Характерным признаком этих механизмов является то, что "... тело кулачка и взаимодействующего с ним звена совершает плоское движение, параллельное одной и той же неподвижной плоскости" [2], и, как следствие, указанный механизм имеет увеличенные габаритно-массовые характеристики.
Прототипом предлагаемого технического решения является кулачковый цилиндрический механизм [3], содержащий основание с направляющими, установленный на основании с возможностью вращения цилиндрический кулачок, установленный в направляющих основания толкатель, жестко связанную с толкателем ось и установленный на оси с возможностью вращения и предназначенный для взаимодействия с кулачком конический ролик.
Функциональный недостаток прототипа заключается в том, что согласно принципиальной схеме этого кулачкового цилиндрического механизма нельзя спроектировать устройство с минимальными габаритно-массовыми характеристиками и минимальным моментом инерции его вращающихся элементов при заданном законе перемещения и, следовательно, не обеспечивается надежное управление работой устройства в условиях вибрационных, линейных и ударных воздействий, например, от шагового двигателя, работающего в старт-стопном режиме.
В данной конструкции определяющим габаритным размером кулачкового цилиндрического механизма, при прочих равных параметрах (силовых и прочностных), является сумма размеров максимальной высоты цилиндрического кулачка и максимального диаметра ролика.
Задача, на решение которой направлено заявляемое техническое решение, заключается в обеспечении надежной работы устройства в условиях вибрационных, линейных и ударных воздействий.
Технический результат, получаемый при осуществлении изобретения, заключается в повышении надежности работы за счет снижения момента инерции путем уменьшения габаритно-массовых характеристик деталей.
Для повышения надежности работы в кулачковом пространственном механизме, содержащем установленные с возможностью вращения кулачок и возможностью возвратно-поступательного перемещения из одного крайнего положения в другое толкатель, взаимодействующие между собой посредством ролика, новым является то, что кулачок и ролик выполнены в виде ступенчатых тел вращения, при этом ролик установлен с возможностью взаимодействия в каждом крайнем положении ступенью меньшего поперечного размера с профилированной поверхностью ступени меньшего поперечного размера кулачка и ступенью большего поперечного размера с профилированной поверхностью ступени большего поперечного размера кулачка.
Этот технический результат получен за счет того, что ролик и кулачок выполнены ступенчатыми и их взаимодействие в начальный момент перемещения толкателя из крайних положений осуществляется поверхностями ступеней меньших поперечных размеров.
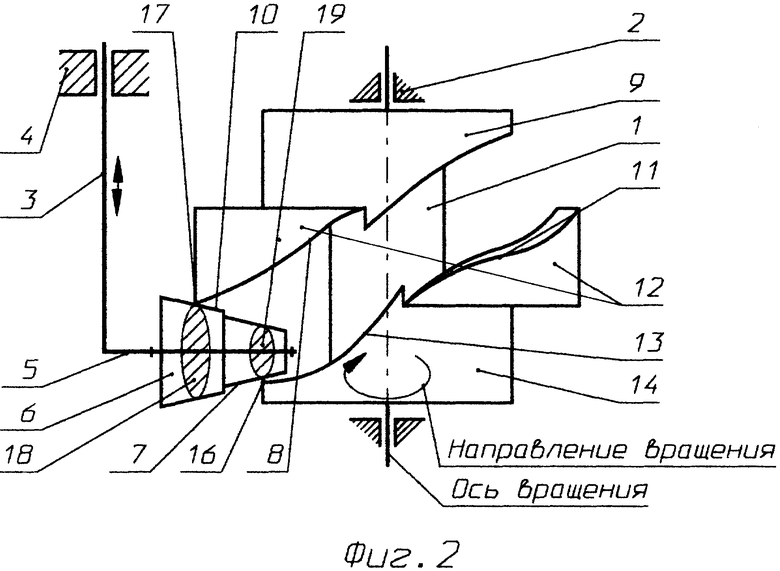
На фиг. 1 изображена принципиальная схема кулачкового пространственного механизма, когда ролик находится в верхнем крайнем положении;
на фиг.2 - то же, когда ролик находится в нижнем крайнем положении.
Кулачковый пространственный механизм содержит кулачок 1, установленный в опорах 2 с возможностью вращения, и толкатель 3, установленный с возможностью возвратно-поступательного перемещения из одного крайнего положения в другое в направляющих 4. С толкателем 3 жестко связана ось 5 ролика 6, взаимодействующего с кулачком 1.
Кулачок 1 выполнен в форме ступенчатого тела вращения, например, в виде трех цилиндров.
Ролик 6 выполнен в форме ступенчатого тела вращения, например, в виде двух конусов.
Ролик 6 относительно кулачка 1 размещен таким образом, что:
в крайнем верхнем положении они имеют возможность контактирования в двух местах (пятна контакта), а именно, первое (16) находится на поверхности 7 ступени меньшего поперечного размера ролика 6 и на профилированной поверхности 8 ступени 9 меньшего поперечного размера кулачка 1, а второе (17) - на поверхности 10 ступени большего поперечного размера ролика 6 и на профилированной поверхности 11 ступени 12 большего поперечного размера кулачка 1;
в крайнем нижнем положении - первое (16) находится на поверхности 7 ступени меньшего поперечного размера ролика 6 и на профилированной поверхности 13 ступени 14 меньшего поперечного размера кулачка 1, а второе (17) - на поверхности 10 ступени большего размера ролика 6 и на профилированной поверхности 15 большего поперечного размера кулачка 1.
Для уменьшения габаритно-массовых характеристик кулачкового пространственного механизма, при сохранении прочностных характеристик его элементов в крайних положениях и силовых характеристик в процессе перемещения толкателя 3, которые определяют выбор поперечного размера большей ступени ролика, ролик 6 и кулачок 1 должны быть выполнены ступенчатыми и взаимодействовать между собой таким образом, чтобы перемещение толкателя 3 в крайних положениях начиналось от взаимодействия через пятно контакта 16, а завершалось от взаимодействия через пятно контакта 17.
Выполнение описанного закона взаимодействия позволяет при прочих равных условиях уменьшить высоту кулачка 1 на величину, равную разнице диаметра поперечной плоскости 18, проходящей через пятно контакта 17 на ступени ролика 6 большего поперечного размера, и диаметра поперечной плоскости 19, проходящей через пятно контакта 16 на ступени ролика меньшего поперечного размера. Это, в свою очередь, приводит к уменьшению массы и момента инерции кулачка 1, вращающегося относительно своей оси.
Закон перемещения толкателя 3 определяется формой выполнения профилированных поверхностей 8, 15, 13, 11 кулачка 1 и числом ступеней кулачка 1 и ролика 6.
Кулачковый пространственный механизм работает следующим образом.
При вращении кулачка 1 ролик 6 перекатывается своими поверхностями 7 и 10 по профилированным поверхностям 8 и 15 соответственно, перемещая толкатель 3 из крайнего верхнего положения в нижнее, и перекатывается своими поверхностями 7 и 10 по профилированным поверхностям 13 и 11 соответственно, перемещая толкатель 3 обратно.
Источники информации
1. Кулачковый механизм. Авторское свидетельство СССР 1608391, F 16 Н 53/00, опубликовано в БИ 43, 1990 год.
2. Крайнев А.Ф. Словарь - справочник по механизмам. - М.; Машиностроение, 1981, с. 153.
3. Кулачковый цилиндрический механизм. Авторское свидетельство СССР 1537928, F 16 Н 53/00, опубликовано в БИ 3, 1990 год.
Изобретение относится к области машиностроения и может быть использовано в передаточных механизмах для преобразования вращательного движения в поступательное с заданным законом перемещения. Технический результат: повышение надежности за счет снижения момента инерции путем уменьшения габаритно-массовых характеристик деталей. Устройство содержит установленные с возможностью вращения кулачок и возможностью возвратно-поступательного перемещения из одного крайнего положения в другое толкатель. Взаимодействие между толкателем и кулачком происходит посредством ролика. Кулачок и ролик выполнены в виде ступенчатых тел вращения. Причем ролик установлен с возможностью взаимодействия в каждом крайнем положении ступенью меньшего поперечного размера с профилированной поверхностью ступени меньшего поперечного размера кулачка и ступенью большего поперечного размера с профилированной поверхностью ступени большего поперечного размера кулачка. 2 ил.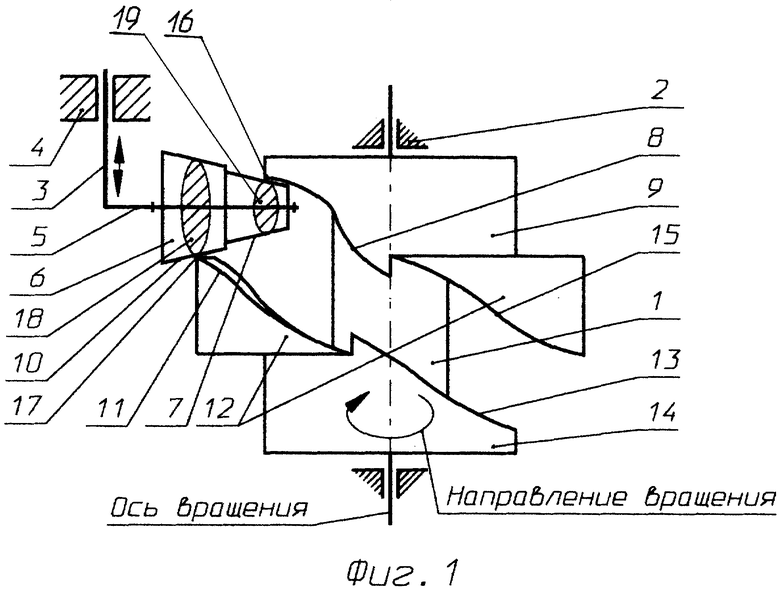
Кулачковый пространственный механизм, содержащий установленные с возможностью вращения кулачок и возможностью возвратно-поступательного перемещения из одного крайнего положения в другое толкатель, взаимодействующие между собой посредством ролика, отличающийся тем, что кулачок и ролик выполнены в виде ступенчатых тел вращения, при этом ролик установлен с возможностью взаимодействия в каждом крайнем положении ступенью меньшего поперечного размера с профилированной поверхностью ступени меньшего поперечного размера кулачка и ступенью большего поперечного размера с профилированной поверхностью ступени большего поперечного размера кулачка.
| Кулачковый цилиндрический механизм | 1985 |
|
SU1537928A1 |
| СПОСОБ КОНСЕРВАЦИИ СВЕЖЕУБРАННОГО ЗЕРНА | 2002 |
|
RU2222901C1 |

