Изобретение относится к области радиоуправления и может быть использовано в полуактивных и пассивных системах самонаведения летательных аппаратов (ЛА) для наведения на воздушную цель (ВЦ).
Известен способ наведения ЛА на ВЦ в наивыгоднейшую упрежденную точку встречи, заключающийся в формировании сигналов управления, определяемых соотношениями
Δг = ϕг-ϕгу,
Δв = ϕв-ϕву,
где ϕг и ϕв - текущие пеленги ВЦ соответственно в горизонтальной и вертикальной плоскостях для полета ЛА в упрежденную точку встречи;
ϕгу, ϕву - требуемые пеленги ВЦ, определяемые соотношениями

где  и
и  - угловые скорости вращения линии визирования ЛА- ВЦ соответственно в горизонтальной и вертикальной плоскостях;
- угловые скорости вращения линии визирования ЛА- ВЦ соответственно в горизонтальной и вертикальной плоскостях;
D - дальность между ЛА и ВЦ;
Va - скорость полета ЛА;
Vcб - скорость сближения ЛА с ВЦ;
tCH - время самонаведения [1, с. 53].
Известно устройство наведения ЛА на ВЦ в наивыгоднейшую упрежденную точку встречи, содержащее пеленгатор, измеритель скорости полета ЛА, дальномер, измеритель скорости сближения, автопилот, канал формирования сигнала управления в горизонтальной плоскости, канал формирования сигнала управления в вертикальной плоскости, причем первые входы обоих каналов соединены соответственно с первым и вторым выходами пеленгатора, вторые их входы объединены и соединены с выходом измерителя скорости сближения, третьи их входы объединены и соединены с выходом дальномера, четвертые их входы объединены и соединены с измерителем скорости, а их выходы с первым и вторым входами АП [1, с. 272].
Недостатком данных способа и устройства является невозможность осуществления самонаведения ДА с пассивной или полуактивной системами самонаведения, что обусловлено отсутствием в пеленговой информации данных о скорости сближения и дальности до ВЦ.
Наиболее близким к изобретению является способ формирования сигналов управления ЛА при наведении на ВЦ, заключающийся в установлении в качестве скоростного параметра в горизонтальной (г) и вертикальной (в) плоскостях скорости сближения
U = Vсб, (1)
и в формировании сигналов управления в горизонтальной и в вертикальной плоскостях, определяемых соотношениями

где jг и jв - текущие значения линейных ускорений ЛА в горизонтальной и вертикальной плоскостях соответственно;
k - коэффициент усиления (навигационная постоянная, коэффициент пропорциональности) [1, 56].
Наиболее близким к изобретению является устройство формирования сигналов управления ЛА при наведении на ВЦ, содержащее антенну, пеленгатор, гидростабилизатор (ГС), измеритель скорости сближения летательного аппарата с целью, автопилот (АП), вертикальные и горизонтальные рули, канал формирования сигнала управления в горизонтальной плоскости, состоящий из последовательно соединенных первого усилителя мощности (УМ), первого блока согласования (БС), первого масштабирующего усилителя (МУ) и первого умножителя, канал формирования сигнала управления в вертикальной плоскости, состоящий из последовательно соединенных второго УМ, второго БС, второго МУ и второго умножителя, причем входы первого и второго УМ соединены соответственно с первым и вторым выходами пеленгатора, первый, второй и третий входы которого соединены соответственно с первым, вторым и третьим выходами антенны, первый и второй механические входы которой соединены соответственно с первым и вторым механическими выходами ГС, первый и второй входы которого соединены с выходами соответственно первого и второго УМ, вторые входы первого и второго умножителей объединены и соединены с выходом измерителя скорости сближения летательного аппарата с целью, а их выходы с первым и вторым входами АП, первый и второй выходы которого соединены соответственно с горизонтальными и вертикальными рулями летательного аппарата [1,с.274].
Недостатками данных способа и устройства являются невозможность применения для ЛА с пассивной или полуактивной системами самонаведения, большое время полета ЛА в точку встречи с целью и невозможность сохранения постоянными параметров самонаведения на участке сближения с целью.
Это обусловлено тем, что, во-первых, необходимо выполнить измерение скорости сближения, не реализуемое по пеленговой информации, во-вторых, самонаведение осуществляется по криволинейной траектории. Утверждается, что при Δг = Δв = 0 выполняется равенство  линия визирования перемещается параллельно самой себе и ракета будет выполнять прямолинейный полет [1, с. 57] . В действительности при неподвижной относительно ракеты линии визирования полет в общем случае будет осуществляться по криволинейной траектории с сохранением постоянным текущего пеленга цели (предельный случай - цель неподвижна и ракета выполняет полет по дуге окружности, в центре которой находится цель), т. е. существующее управление не приводит к прекращению вращения вектора дальности ЛА - ВЦ. Последнее приводит к дополнительным затратам временных и энергетических ресурсов, а также к изменению пеленга и ракурса цели (параметров самонаведения), из-за чего возможны (при сближении в переднюю полусферу) потеря контакта с источником излучения или (при сближении в заднюю полусферу) дополнительное увеличение времени самонаведения ввиду уменьшения скорости сближения.
линия визирования перемещается параллельно самой себе и ракета будет выполнять прямолинейный полет [1, с. 57] . В действительности при неподвижной относительно ракеты линии визирования полет в общем случае будет осуществляться по криволинейной траектории с сохранением постоянным текущего пеленга цели (предельный случай - цель неподвижна и ракета выполняет полет по дуге окружности, в центре которой находится цель), т. е. существующее управление не приводит к прекращению вращения вектора дальности ЛА - ВЦ. Последнее приводит к дополнительным затратам временных и энергетических ресурсов, а также к изменению пеленга и ракурса цели (параметров самонаведения), из-за чего возможны (при сближении в переднюю полусферу) потеря контакта с источником излучения или (при сближении в заднюю полусферу) дополнительное увеличение времени самонаведения ввиду уменьшения скорости сближения.
Цель изобретения - уменьшение времени полета в упрежденную точку встречи с целью для ЛА с пассивной и полуактивной системами самонаведения и сохранение постоянными параметров самонаведения на участке сближения с целью.
Указанная цель достигается тем, что в способе формирования сигналов управления ЛА при наведении на ВЦ, включающем формирование сигналов управления в горизонтальной и в вертикальной плоскостях, воздействующих через автопилот ЛА на горизонтальные и вертикальные рули ЛА и определяемых соответственно соотношениями (2), (3), дополнительно в качестве скоростного параметра используют скорость полета ЛА
U = Va, (4)
и формируют поправки к сигналам управления в горизонтальной и в вертикальной плоскостях в соответствие с соотношениями
δг = (k+p)jг, (5)
δв = (k+p)jв, (6)
где p = 0,794-0,7τ<1 - коэффициент затухания, τ - интервал измерения угловой скорости вращения ЛА;
суммируют поправки с сигналами управления в горизонтальной и в вертикальной плоскостях (2) и (3).
Кроме того, указанная цель достигается.... (далее относящееся к независимому п.2 формулы).
Новыми признаками, обладающими существенными отличиями, являются:
1. Использование в качестве скоростного параметра скорости полета летательного аппарата(4).
2. Формирование поправок, определяемых соотношениями (5), (6).
3. Суммирование поправок с сигналами управления в горизонтальной и в вертикальной плоскостях (2), (3).
4. Каналы формирования поправок к сигналам управления в горизонтальной и вертикальной плоскостях.
5. Новые связи между известными и новыми признаками, т.е. в целом новая схема устройства формирования сигнала управления летательным аппаратом при наведении на воздушную цель.
Данные признаки обладают существенными отличиями, т. к. в известных способах и их технических решениях не обнаружены.
Использование всех новых признаков позволяет уменьшить время полета в упрежденную точку встречи с целью для летательного аппарата с пассивной системой самонаведения и сохранить постоянными параметры самонаведения на участке сближения с целью за счет использования в качестве скоростного параметра скорости полета летательного аппарата (4), формирования поправок, определяемых соотношениями (5), (6), суммирования поправок с сигналами управления в горизонтальной и в вертикальной плоскостях (2), (3).
Кроме того, указанная цель достигается тем, что в устройство для осуществления предложенного способа формирования сигналов управления летательным аппаратом, содержащее антенну, пеленгатор, ГС, АП, вертикальные и горизонтальные рули, канал формирования сигнала управления в горизонтальной плоскости, состоящий из последовательно соединенных первого УМ, первого БС, первого МУ и первого умножителя, канал формирования сигнала управления в вертикальной плоскости, состоящий из последовательно соединенных второго УМ, второго БС, второго МУ и второго умножителя, причем входы первого и второго УМ соединены соответственно с первым и вторым выходами пеленгатора, первый, второй и третий входы которого соединены соответственно с первым, вторым и третьим выходами антенны, первый и второй механические входы которой соединены соответственно с первым и вторым механическими выходами ГС, первый и второй входы которого соединены с выходами соответственно первого и второго УМ, первый и второй выходы АП соединены соответственно с горизонтальными и вертикальными рулями летательного аппарата, дополнительно введены измеритель скорости полета летательного аппарата, канал формирования поправки сигнала управления в горизонтальной плоскости, состоящий из первого датчика линейного ускорения (ДЛУ), первого и второго сумматоров, третьего и четвертого МУ, канал формирования поправки сигнала управления в вертикальной плоскости, состоящий из второго ДЛУ, третьего и четвертого сумматоров, пятого и шестого МУ, причем вторые входы первого и второго умножителей объединены и соединены с выходом измерителя скорости, а их выходы с первыми входами соответственно второго и четвертого сумматоров, выходы которых соединены соответственно с первым и вторым входами АП, а вторые входы соединены с выходами соответственно первого и третьего сумматоров, первый и второй входы которых соединены с выходами соответственно третьего, четвертого МУ и пятого, шестого МУ, входы третьего и четвертого МУ объединены и соединены с выходом первого ДЛУ, входы пятого и шестого МУ объединены и соединены с выходом второго ДЛУ.
Новыми признаками, обладающими существенными отличиями, являются:
1. Установление в качестве скоростного параметра скорости полета летательного аппарата (4).
2. Формирование поправок к сигналам управления летательным аппаратом в горизонтальной и вертикальной плоскостях, определяемых соотношениями (5), (6).
3. Каналы формирования поправок к сигналам управления в горизонтальной и вертикальной плоскостях.
4. Новые связи между известными и новыми признаками, т.е. в целом новая схема устройства формирования сигнала управления летательным аппаратом при наведении на воздушную цель.
Данные признаки обладают существенными отличиями, т. к. в известных способах и их технических решениях не обнаружены.
Использование всех новых признаков позволяет уменьшить время полета в упрежденную точку встречи с целью для летательного аппарата с пассивной и полуактивной системами самонаведения и сохранить постоянными параметры самонаведения на участке сближения с целью за счет установление в качестве скоростного параметра скорости полета летательного аппарата (4) и формирования поправок к сигналам управления летательным аппаратом в горизонтальной и вертикальной плоскостях, определяемых соотношениями (5), (6).
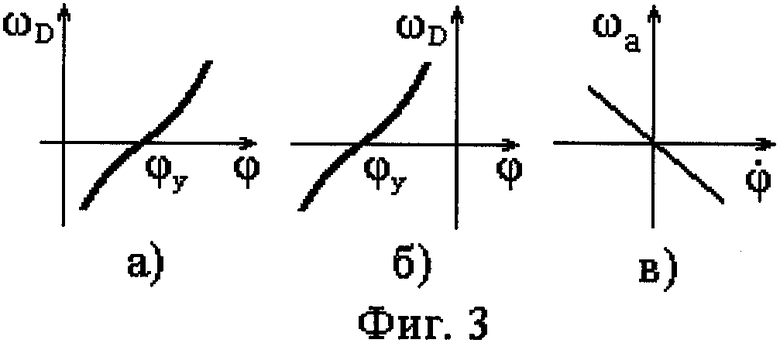
На фиг. 1 представлен треугольник наведения; на фиг. 2, а - кинематическая схема наведения ЛА на ВЦ, на фиг. 2, б - зависимость угловой скорости вращения вектора дальности от пеленга цели; на фиг. 3, а) и б) - зависимости угловой скорости вращения вектора дальности от правого и левого пеленгов цели; на фиг. 3, в) - зависимость угловой скорости вращения линии визирования от собственной угловой скорости вращения ЛА; на фиг. 4 - блок-схема устройства для предложенного способа формирования сигналов управления.
Известно, что оптимальные по быстродействию траектории состоят из прямолинейных отрезков, сопряженных с участками разворотов [2]. Управление при этом релейное, т.е. изменяется ступенчато: оно максимально на участке разворота и "отсутствует" на прямолинейном участке. К таким траекториям относится траектория параллельного сближения, обеспечивающая полет ЛА в упрежденную точку встречи по прямой.
Известно уравнение для определения пеленга ВЦ для полета А в упрежденную точку встречи с целью
где q - ракурс цели;
Va - скорость полета ЛА;
Vц - скорость полета ВЦ [3, с. 215].
Для выхода на направление полета в упрежденную точку встречи ЛА необходимо выполнить разворот с максимально допустимой угловой скоростью вращения. При параллельном наведении кинематическая связь ЛА и цели иллюстрируется на плоскости с помощью треугольника наведения [1, 50-56], [3, 215]. Используются следующие обозначения (фиг. 1.):
А и Ц - положение ЛА и цели соответственно;
В - положение упрежденной точки встречи;
D - линия визирования ЛА-цель (вектор дальности);
ϕ - пеленг цели, измеряемый как угол между вектором скорости ЛА Va и направлением на цель (диапазон значений ±π);)
q - ракурс цели, измеряемый как угол между вектором скорости цели Vц и направлением на ЛА (диапазон значений ±π);
ωa - угловая скорость вращения ЛА в плоскости;
ωц - угловая скорость вращения цели в плоскости;
ωD - угловая скорость вращения вектора дальности на плоскости.
В связанной скоростной системе координат взаимное положение ЛА и цели может быть представлено системой дифференциальных уравнений
Наведение по траектории параллельного сближения может состояться, если будет остановлено вращение не только линии визирования, но, а это является основным требованием, и вектора дальности. Признаками их вращения являются угловые скорости  и ωD соответственно, т.е. должно быть выполнено условие
и ωD соответственно, т.е. должно быть выполнено условие
Из второго уравнения системы (8) и требования ωD = 0 следует, что требуемое управление ЛА должно быть сведено к реализации закона изменения собственной угловой скорости вращения
Уравнение (7) в своей области определения имеет два решения. Первое - главный угол ϕу, второе - угол ϕ
1. С течением времени цель будет все более отставать от ЛА, находящегося в секторе опережения. Т.е. с началом наведения угловые скорости вращения вектора дальности и линии визирования АЦ будут отрицательными (фиг. 2,б). Последнее согласно (10) приведет к формированию положительной собственной угловой скорости вращения ЛА, уводя его вектор скорости от заданного направления полета в сторону сближения с направлением AD слева от него.
2. За пределами сектора ЛА будет отставать от цели, что приведет к положительному направлению вращения линии визирования АЦ и соответственно к отрицательной угловой скорости вращения ЛА. Последнее - к отвороту от направления АВ и сближению с направлением AD справа от него.
Таким образом, управление (11) сходится ко второму решению (7), т.е. "наведение" на смещенную цель Ц* обеспечивает параллельное сближение ЛА с истинной целью Ц. Система уравнений, связывающая ЛА со смещенной целью, отличается от системы (8) в записи второго уравнения
Согласно (10), закон управления, определяющий направление полета ЛА, которое не пересекается с направлением полета смещенной цели, примет вид
ωaзад = ωD+ωaтек.
С учетом замены параметра ωD, который не может быть измерен на борту ЛА, закон управления ЛА для его параллельного сближения с истинной целью приобретает вид
Чтобы раскрыть функциональное назначение второго и третьего слагаемых в (12), существует другой подход к поиску решения: вначале устраняется вращение линии визирования, затем вращение вектора дальности. Из условия  следует, что для прекращения вращения линии визирования достаточно сформировать управление
следует, что для прекращения вращения линии визирования достаточно сформировать управление
ωазад = ωD. (13)
В результате ЛА будет выведен на криволинейную траекторию полета с сохранением постоянным значение текущего пеленга цели. Данный процесс является неустойчивым и в случае возникновения возмущений (маневр цели, движение воздуха, ошибки управления и т.п.), изменяющих значение пеленга, управление будет поддерживать его новое значение. Для реализации главного условия параллельного сближения: прекращения вращения вектора дальности, необходимо модифицировать закон управления (13), чтобы ЛА смог перейти на траекторию полета с пеленгом, для которого ωазад = ωD = 0. В управление (13) вводится дополнительное слагаемое, которое позволит осуществлять последовательные переходы ЛА на траектории, все ближе расположенные к требуемой
ωазад = ωD+ωатек,
и произведя исключение ωD, получим выражение, тождественное (12). На фиг. 3 показано, как происходит процесс перехода. Приведена зависимость угловой скорости вращения вектора дальности от правого пеленга цели (фиг. 3, а), от левого пеленга (фиг. 3, б), а также зависимость приращения пеленга от собственной угловой скорости поворота ЛА. При полете ЛА по траектории с текущим пеленгом (ωD≠0), отличающимся от упрежденного, добавление в управление слагаемого ωa (фиг. 3, в) приведет в любом из вариантов, а) или б), к сближению текущего пеленга с упрежденным (ωD = 0), а в конечном итоге к выполнению условия (10).
Идентичные слагаемые ωa (12) выполняют различные функции: первое жестко связано с  т.к. их сумма определяет ωD, второе осуществляет в семействе траекторий постоянного пеленга (13) переход на траекторию параллельного сближения. Чтобы выполнить рекомендации [2] по достижению максимального быстродействия, для повышения темпа разворота ЛА на направление полета в упрежденную точку встречи в (12) введен коэффициент усиления k, что ускоряет сходимость текущей траектории с траекторией параллельного сближения, а с целью устранения колебаний после разворота - коэффициент затухания р<1
т.к. их сумма определяет ωD, второе осуществляет в семействе траекторий постоянного пеленга (13) переход на траекторию параллельного сближения. Чтобы выполнить рекомендации [2] по достижению максимального быстродействия, для повышения темпа разворота ЛА на направление полета в упрежденную точку встречи в (12) введен коэффициент усиления k, что ускоряет сходимость текущей траектории с траекторией параллельного сближения, а с целью устранения колебаний после разворота - коэффициент затухания р<1
где p = 0,794-0,7τ;
τ - интервал измерения угловой скорости вращения ЛА.
С учетом известного в механике соотношения j = Vω последнее выражение преобразуется в соотношения, используемые для записи сигналов управления ЛА в горизонтальной и вертикальной плоскостях

Сравнивая выражения (1), (2) и (3) с выражениями (15) и (16), видим, что для достижения цели изобретения в существующем способе [1] достаточно установить в качестве скоростного параметра скорость полета ЛА, а в формируемые сигналы управления аддитивно ввести поправки, определяемые выражениями (5) и (6).
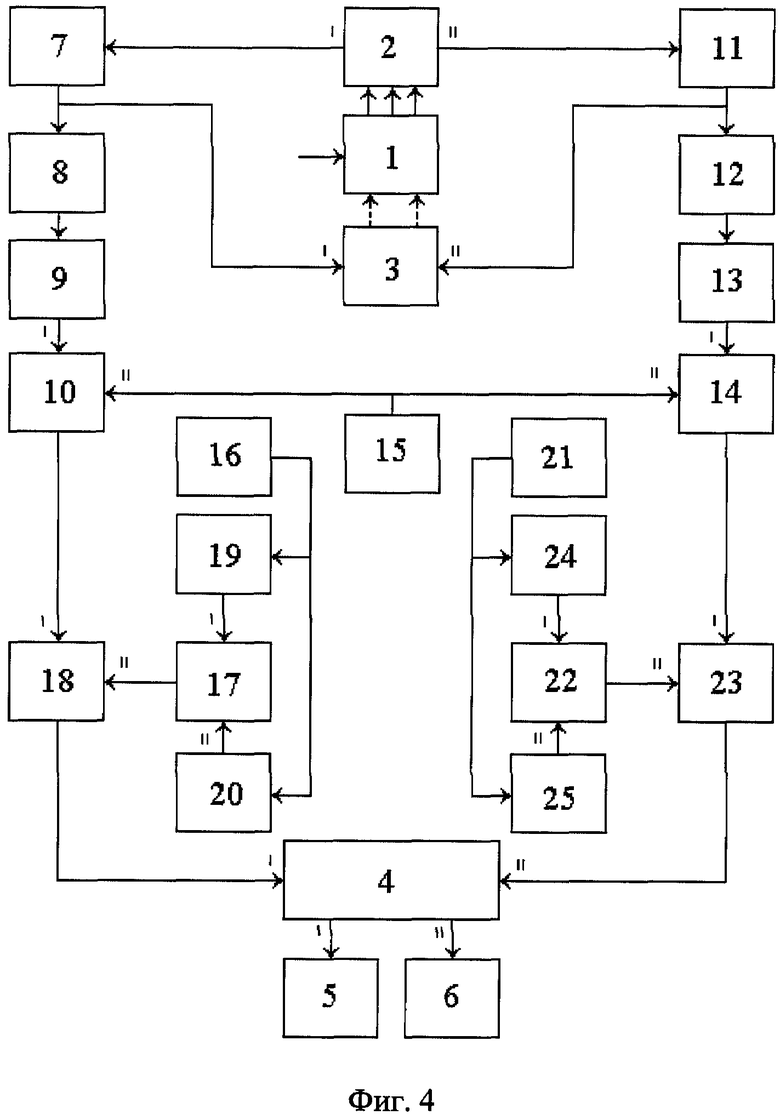
Устройство для осуществления предложенного способа формирования сигналов управления летательным аппаратом содержит (фиг. 4) антенну 1, пеленгатор 2, ГС 3, АП 4, вертикальные 5 и горизонтальные 6 рули, канал формирования сигнала управления в горизонтальной плоскости, состоящий из последовательно соединенных первого УМ 7, первого БС 8, первого МУ 9 и первого умножителя 10, канал формирования сигнала управления в вертикальной плоскости, состоящий из последовательно соединенных второго УМ 11, второго БС 12, второго МУ 13 и второго умножителя 14, причем входы первого 7 и второго УМ 11 соединены соответственно с первым и вторым выходами пеленгатора 2, первый, второй и третий входы которого соединены соответственно с первым, вторым и третьим выходами антенны 1, первый и второй механические входы которой соединены соответственно с первым и вторым механическими выходами ГС 3, первый и второй входы которого соединены с выходами соответственно первого 7 и второго 11 УМ, первый и второй выходы АЛ 4 соединены соответственно с горизонтальными 5 и вертикальными 6 рулями летательного аппарата, а также содержит измеритель скорости 15, канал формирования поправки сигнала управления в горизонтальной плоскости, состоящий из первого ДЛУ 16, первого 17 и второго 18 сумматоров, третьего 19 и четвертого 20 МУ, канал формирования поправки сигнала управления в вертикальной плоскости, состоящий из второго 21 ДЛУ, третьего 22 и четвертого 23 сумматоров, пятого 24 и шестого 25 МУ, причем вторые входы первого 10 и второго 14 умножителей объединены и соединены с выходом измерителя скорости 15, а их выходы с первыми входами соответственно второго 18 и четвертого 23 сумматоров, выходы которых соединены соответственно с первым и вторым входами АП 4, а вторые входы соединены с выходами соответственно первого 17 и третьего 22 сумматоров, первый и второй входы которых соединены с выходами соответственно третьего 19, четвертого 20 МУ и пятого 24, шестого 25 МУ, входы третьего 19 и четвертого 20 МУ объединены и соединены с выходом первого ДЛУ 16, входы пятого 24 и шестого 25 МУ объединены и соединены с выходом второго ДЛУ 21.
Первый 8 и второй 12 БС представляют собой усилители с коэффициентами усиления КдвКwНг, где Кдв, KwHг - коэффициент передачи корректирующего двигателя и кинетический момент ГС 3 соответственно; Kw - масштабный коэффициент по угловой скорости вращения линии визирования [1]. БС 8 и 12 идентичны для обоих каналов и отличаются только численными значениями коэффициентов.
Первый 9, второй 13, третий 19 и пятый 23 МУ представляют собой усилители с коэффициентом усиления k.
Четвертый 20 и шестой 24 МУ представляют собой усилители с коэффициентом усиления (р-1).
Пример исполнения антенны 1 и пеленгатора 2 приведен в [1].
Измеритель скорости полета 15 представляет собой элемент системы воздушных сигналов, пример исполнения которой приведен в [4, с. 95].
Первый 16 и второй 21 ДЛУ представляют собой акселерометры, пример исполнения которых приведен в [4, с. 133].
Все цифровые блоки и устройства тактируются с помощью соответствующих синхроимпульсов с выхода синхронизатора (на схеме не показан).
Способ формирования сигналов управления ЛА при наведении на воздушную цель осуществляется следующим образом. Сигнал, отраженный от ВЦ, через антенну 1 (фиг. 4) поступает на три входа пеленгатора 2 (разностные сигналы в горизонтальной и вертикальной плоскостях и суммарный сигнал). С его первого выхода сигнал, соответствующий угловому отклонению ВЦ от равносигнального направления в горизонтальной плоскости, поступает в канал формирования сигнала управления в горизонтальной плоскости на вход первого УМ 7. После усиления и преобразования в первом БС 8 в сигнал, соответствующий величине  , он поступает через первый МУ 9 на первый вход первого множителя 10. На второй его вход с измерителя скорости поступает сигнал, соответствующий скорости полета ЛА. На выходе первого умножителя формируется сигнал, соответствующий величине
, он поступает через первый МУ 9 на первый вход первого множителя 10. На второй его вход с измерителя скорости поступает сигнал, соответствующий скорости полета ЛА. На выходе первого умножителя формируется сигнал, соответствующий величине  который поступает на первый вход второго сумматора 18. С выхода первого ДЛУ16 боковое линейное ускорение через третий 19 и четвертый 20 МУ, промасштабированное, поступает на оба входа первого сумматора 17. Коэффициент усиления четвертого МУ 20 подобран с учетом вычитаемого в (2) текущего значения линейного ускорения jг. На выходе первого сумматора 17 формируется содержащий поправку сигнал (k+p-l)jг, который поступает на второй вход второго сумматора 18. В итоге на первый вход АП 4 поступит сигнал, равный
который поступает на первый вход второго сумматора 18. С выхода первого ДЛУ16 боковое линейное ускорение через третий 19 и четвертый 20 МУ, промасштабированное, поступает на оба входа первого сумматора 17. Коэффициент усиления четвертого МУ 20 подобран с учетом вычитаемого в (2) текущего значения линейного ускорения jг. На выходе первого сумматора 17 формируется содержащий поправку сигнал (k+p-l)jг, который поступает на второй вход второго сумматора 18. В итоге на первый вход АП 4 поступит сигнал, равный  с первого выхода которого сигнал управления поступит на горизонтальные рули 5. Управление ЛА осуществляется таким образом, чтобы добиться устранения Δг.
с первого выхода которого сигнал управления поступит на горизонтальные рули 5. Управление ЛА осуществляется таким образом, чтобы добиться устранения Δг.
Со второго выхода пеленгатора 2 сигнал, соответствующий угловому отклонению ВЦ от равносигнального направления в вертикальной плоскости, поступает в канал формирования сигнала управления в вертикальной плоскости на вход второго УМ 11. Далее канал работает аналогично описанному выше. В результате на второй вход АП 4 поступит сигнал, равный  со второго выхода которого сигнал управления поступит на вертикальные рули 6. Управление ЛА осуществляется таким образом, чтобы добиться устранения
со второго выхода которого сигнал управления поступит на вертикальные рули 6. Управление ЛА осуществляется таким образом, чтобы добиться устранения 
В конечном итоге будет сформирована траектория наведения, состоящая из участка, выполненного с максимальной допустимой угловой скоростью разворота, сопряженного с участком прямой, причем на участке прямой соблюдаются соотношения
Vсб=const; q=const; ϕ = const.
Источники информации
1. Максимов М.В. Горгонов Г.И. Радиоэлектронные системы самонаведения. - М.: Радио и связь, 1982, с. 1, 50-57, 272, 274.
2. Весткотт Дж. Г., Флорентин Дж.Дж., Пирсон Дж.Д. Приближенные методы теории оптимальных и самонастраивающихся систем. Труды II Международного Конгресса Международной Федерации по автоматическому управлению. Базель (Швейцария), 1963 // Оптимальные системы. Статистические методы. - М:, "Наука", 1965.
3. Справочник по исследованию операций / Под общ. ред. Ф.А. Матвейчука - М.: Воениздат, 1979, с. 215.
4. Авиационное оборудование / Ю.А. Андриевский, Ю.Е. Воскресенский, Ю.П. Доброленский и др.; Под ред. Ю.П. Доброленского. - М.: Воениздат, 1989, с. 95, 133.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ИСТОЧНИК РАДИОИЗЛУЧЕНИЯ В ДВУХПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2262649C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ ПО КУРСУ В УГЛОМЕРНОЙ ДВУХПОЗИЦИОННОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2006 |
|
RU2308093C1 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ НАИБОЛЕЕ БЛАГОПРИЯТНЫХ ДЛЯ АТАКИ ВОЗДУШНЫХ ЦЕЛЕЙ В РЕЖИМЕ МНОГОЦЕЛЕВОГО СОПРОВОЖДЕНИЯ | 2020 |
|
RU2743479C1 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ КЛАССА "ВОЗДУХ-ВОЗДУХ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099665C1 |
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К НАЗЕМНОМУ ОБЪЕКТУ | 2012 |
|
RU2521890C2 |
| СПОСОБ ИНДИВИДУАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ | 2020 |
|
RU2742626C1 |

Изобретение относится к области радиоуправления и может быть использовано в полуактивных и пассивных системах самонаведения летательных аппаратов (ЛА) для наведения на воздушную цель. Технический результат - уменьшение времени полета в упрежденную точку встречи с целью. Способ заключается в формировании сигналов управления в горизонтальной и вертикальной плоскостях, воздействующих на рули ЛА и определяемых соотношениями  где jп - текущее значение линейного ускорения ЛА;
где jп - текущее значение линейного ускорения ЛА;  - угловая скорость вращения линии визирования; k - коэффициент усиления; Vа - скорость полета ЛА; δп - поправка, р - коэффициент затухания. Устройство формирования сигналов управления ЛА содержит антенну, пеленгатор, гидростабилизатор, автопилот, вертикальные и горизонтальные рули, каналы формирования сигналов управления в горизонтальной и вертикальной плоскостях, а также измеритель скорости полета ЛА и каналы формирования поправок сигналов управления в горизонтальной и вертикальной плоскостях. 2 с.п.ф-лы, 4 ил.
- угловая скорость вращения линии визирования; k - коэффициент усиления; Vа - скорость полета ЛА; δп - поправка, р - коэффициент затухания. Устройство формирования сигналов управления ЛА содержит антенну, пеленгатор, гидростабилизатор, автопилот, вертикальные и горизонтальные рули, каналы формирования сигналов управления в горизонтальной и вертикальной плоскостях, а также измеритель скорости полета ЛА и каналы формирования поправок сигналов управления в горизонтальной и вертикальной плоскостях. 2 с.п.ф-лы, 4 ил.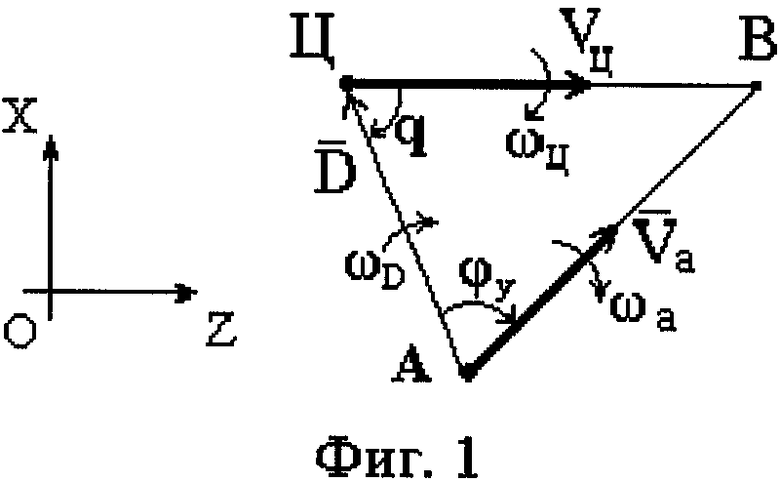
где jг и jв - текущие значения линейных ускорений летательного аппарата в горизонтальной и вертикальной плоскостях соответственно; и
и  - значения угловых скоростей вращения линии визирования цели в горизонтальной и вертикальной плоскостях соответственно;
- значения угловых скоростей вращения линии визирования цели в горизонтальной и вертикальной плоскостях соответственно;
k - коэффициент усиления в каналах управления горизонтальными и вертикальными рулями;
U - скоростной параметр;
отличающийся тем, что в качестве скоростного параметра используют скорость полета летательного аппарата и формируют поправки к сигналам управления в горизонтальной и вертикальной плоскостях в соответствии с соотношениями
δг = (k+p)jг,
δв = (k+p)jв,
где p = 0,794-0,7τ<1 - коэффициент затухания, τ - интервал измерения угловой скорости вращения летательного аппарата, суммируют поправки с сигналами управления в горизонтальной и вертикальной плоскостях.
| МАКСИМОВ М.В | |||
| Радиоэлектронные системы самонаведения | |||
| - М.: Радио и связь, 1982, с | |||
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ КЛАССА "ВОЗДУХ-ВОЗДУХ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099665C1 |
| СПОСОБ СУШКИ МАКАРОННЫХ ИЗДЕЛИЙ | 1973 |
|
SU436215A1 |
| СПОСОБ ПРОИЗВОДСТВА ДЕСЕРТА | 2013 |
|
RU2517818C1 |
