Изобретение относится к системам самонаведения, в частности к системам самонаведения летательных аппаратов (ЛА) на наземные объекты с помощью радиолокационных средств, установленных на борту ЛА, использующих синтезирование апертуры (СА) антенны или доплеровское обужение луча (ДОЛ) диаграммы направленности антенны.
Известно несколько традиционных способов наведения ЛА на наземные объекты: способ флюгерного наведения [1, стр. 181]; способ последовательных упреждений [1, стр. 182].
В общем случае под способом наведения понимается закон формирования требуемой фазовой траектории наводимого объекта управления, наведение по которой позволит поразить цель или объект. Фазовые координаты требуемого движения находятся путем преобразования фазовых координат относительного и абсолютного движения цели (наземного объекта) и объекта управления (наводимого ЛА). Правило формирования сигналов управления, именуемых также параметрами рассогласования, по которому определяется несоответствие реальных фазовых координат наводимого ЛА их требуемым значениям называется алгоритмом траекторного управления. Следует отметить, что в системах самонаведения ЛА на наземные объекты сигналы управления (параметры рассогласования) обычно формируются в горизонтальной и вертикальной плоскостях, поскольку именно в этих плоскостях (курса и тангажа) размещаются их рулевые органы.
Сущность способа флюгерного наведения заключается в том, что с направлением на наземный объект совмещается вектор воздушной скорости наводимого ЛА. В случае если параметры рассогласования для плоскостей курса и тангажа формируются в стабилизированной в пространстве измерительной системе координат, то алгоритм траекторного управления при способе флюгерного наведения определяется следующими соотношениями:
ΔфГ= ϕГ+αsinγ, ΔФВ= ϕВ+αcosγ, (1)
где ΔфГ,ΔФВ - сигналы управления при способе флюгерного наведения в горизонтальной и вертикальной плоскостях соответственно;
ϕГ,ϕB - бортовые пеленги наземного объекта в горизонтальной и вертикальной плоскостях, измеряемые угломером бортовой радиолокационной станции (БРЛС) со стабилизированной в пространстве антенной;
α,γ - соответственно углы атаки и крена.
Необходимость учета в (1) вторых слагаемых обусловлена тем, что мгновенное направление движения ЛА совпадает с направлением вектора его скорости, которое отличается от положения строительной оси ЛА на значение угла атаки. При наличии крена угломер со стабилизированной антенной по-прежнему измеряет проекции бортового пеленга в горизонтальной ϕГ и вертикальной ϕB плоскостях, в то время как пространственное положение угла атаки изменяется. Последнее и вызывает появление проекций αsinγ и αcosγ угла атаки на горизонтальную и вертикальную плоскости. Способ флюгерного наведения в силу своей простоты широко применяется при наведении ЛА на неподвижные и малоподвижные наземные объекты, однако основным его недостатком является достаточно сильное влияние бокового ветра на точность наведения. При необходимости парирования ветра обычно используют способ последовательных упреждений.
При использовании способа последовательных упреждений, называемого иногда способом погони с дополнительным углом упреждения, сигналы управления в горизонтальной и вертикальной плоскостях наряду со слагаемыми, пропорциональными проекциям бортового пеленга наземного объекта, содержат также проекции дополнительного угла упреждения, который выбирают пропорциональным угловой скорости линии визирования. Значения коэффициентов пропорциональности выбираются, как правило, таким образом, чтобы траектория наведения была близка к прямолинейной.
Следует отметить, что спецификой способов наведения ЛА с бортовыми радиолокационными средствами, использующими СА или ДОЛ, на наземные объекты является использование сугубо криволинейных траекторий наведения в горизонтальной плоскости. Как правило, эти траектории должны на первоначальном участке обеспечить требуемое линейное разрешение в горизонтальной плоскости, а на конечном - высокую точность наведения на наземный, в общем случае подвижный объект. При таких траекториях наведения резко возрастают расходы энергии на управление ЛА, в связи с чем актуальным также становится вопрос улучшения экономичности процедур наведения (под экономичностью здесь понимается свойство системы наведения, характеризующее ее способность затрачивать на сигналы управления возможно меньшее количество энергии).
Однако удовлетворить противоречивым требованиям высокой точности и экономичности наведения при стабилизации требуемого линейного разрешения в горизонтальной плоскости, в условиях реальных ограничений на располагаемые поперечные перегрузки ЛА при использовании любого традиционного способа наведения практически невозможно. Следует подчеркнуть, что поочередное эмпирическое использование на различных участках траектории различных способов наведения не позволяет получить приемлемых результатов из-за трудности определения момента перехода с одного способа на другой, возникновения значительных переходных процессов и сложности обеспечения экономичности наведения.
Из известных способов наведения ЛА на наземные объекты наиболее близким (прототипом) является способ последовательных упреждений [1, стр. 182], поскольку при данном способе наведения сигнал управления в горизонтальной плоскости содержит слагаемые, пропорциональные значениям бортового пеленга и угловой скорости линии визирования, как и в предлагаемом изобретении. Алгоритм траекторного управления в горизонтальной плоскости при использовании способа последовательных упреждений может быть представлен в следующем виде:
где ΔПУГ - сигнал управления в горизонтальной плоскости; соответствующие постоянные коэффициенты усиления;
соответствующие постоянные коэффициенты усиления;
ϕГ - значение бортового пеленга наземного объекта в горизонтальной плоскости;
ωГ - значение угловой скорости линии визирования в горизонтальной плоскости.
Коэффициенты  выбираются таким образом, чтобы траектория наведения была близка к прямолинейной.
выбираются таким образом, чтобы траектория наведения была близка к прямолинейной.
Однако использование данного способа при наведении ЛА на наземные объекты с использованием БРЛС, работающих в режимах СА или ДОЛ, представляется затруднительным. Это объясняется следующими основными недостатками прототипа:
невозможностью стабилизации требуемого линейного разрешения БРЛС в горизонтальной плоскости (поскольку при использовании способа последовательных упреждений траектория наведения близка к прямолинейной, то практически невозможно обеспечить использование СА или ДОЛ, для которых принципиальным условием является отличие от нуля значений бортового пеленга наземного объекта, что, в свою очередь, предопределяет криволинейность траекторий наведения);
отсутствием учета требований к экономичности процесса наведения, особенно при использовании криволинейных траекторий наведения (поскольку при использовании постоянных коэффициентов усиления невозможно учесть изменяющиеся в общем случае в процессе наведения затраты энергии на сигналы управления);
отсутствием учета условий применения (поскольку при изменении условий функционирования, например при изменении дальности от ЛА до наземного объекта, скорости сближения и др., постоянные коэффициенты усиления в общем случае необходимо перестраивать, то есть они не являются адаптивными к условиям применения).
Таким образом, задачей настоящего изобретения является разработка способа наведения летательных аппаратов на наземные объекты, одновременно обеспечивающего высокую точность наведения, стабилизацию требуемого линейного разрешения в горизонтальной плоскости при использовании СА или ДОЛ в БРЛС и высокую экономичность процесса управления.
Поставленная задача достигается тем, что в способе последовательных упреждений, заключающемся в том, что измеряют значения бортового пеленга наземного объекта и угловой скорости линии визирования в горизонтальной плоскости, сигнал управления в горизонтальной плоскости формируют путем суммирования взвешенных на соответствующие коэффициенты усиления значений бортового пеленга наземного объекта и угловой скорости линии визирования (2) дополнительно измеряют дальность от наводимого ЛА до наземного объекта и скорость их сближения, а также скорость наводимого ЛА и его поперечное ускорение в горизонтальной плоскости; рассчитывают требуемый угол упреждения, обеспечивающий требуемое линейное разрешение в горизонтальной плоскости, в сигнал управления в горизонтальной плоскости вводят дополнительное слагаемое, учитывающее расход текущих перегрузок (ускорений); формируют переменные коэффициенты усиления, учитывающие условия функционирования (дальность от наводимого ЛА до наземного объекта и скорость их сближения), вес ошибок наведения по бортовому пеленгу и угловой скорости линии визирования, а также требования к экономичности наведения. Последнее дает возможность в процессе наведения автоматически перераспределять приоритеты между точностью, экономичностью наведения и стабилизацией требуемого линейного разрешения.
Предлагаемый способ наведения осуществляется следующим алгоритмом траекторного управления в горизонтальной плоскости:
где ΔГ - сигнал управления в горизонтальной плоскости; коэффициенты, определяющие точность наведения по бортовому пеленгу и угловой скорости линии визирования в горизонтальной плоскости:
коэффициенты, определяющие точность наведения по бортовому пеленгу и угловой скорости линии визирования в горизонтальной плоскости: - коэффициент, определяющий экономичность наведения в горизонтальной плоскости;
- коэффициент, определяющий экономичность наведения в горизонтальной плоскости;
ϕГ - значение бортового пеленга в горизонтальной плоскости;
ωГ - значение угловой скорости линии визирования в горизонтальной плоскости;
Д - значение дальности от наводимого ЛА до наземного объекта;
VСБ - значение скорости сближения наводимого ЛА с наземным объектом;
V - значение скорости наводимого ЛА;
jГ - значение поперечного ускорения наводимого ЛА в горизонтальной плоскости;
λ - длина волны БРЛС;
ΔF - полоса пропускания доплеровского фильтра:
ϕГТ - требуемый угол упреждения, при котором обеспечивается требуемое линейное разрешение ΔlT в горизонтальной плоскости.
На фиг. 1 пунктирной линией изображена траектория наведения при способе последовательных упреждений, а сплошной линией - траектория наведения при предложенном способе наведения.
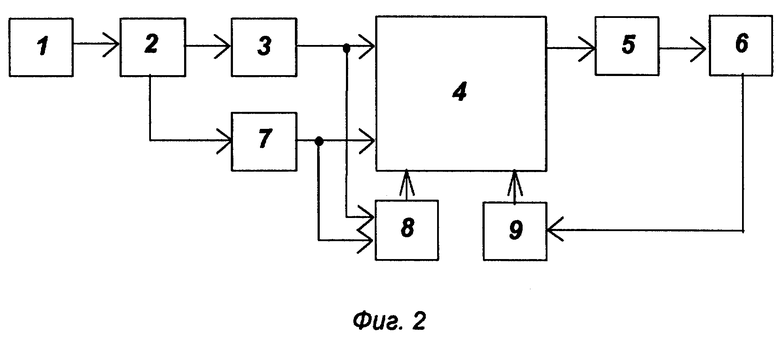
На фиг. 2 представлена упрощенная структурная схема возможного варианта системы наведения ЛА на наземные объекты, реализующей предлагаемый способ наведения, где;
1 - антенная система БРЛС:
2 - приемник/передатчик БРЛС,
3 - угломер БРЛС;
4 - вычислитель сигнала управления;
5 - система управления:
6 - летательный аппарат;
7 - автоматический селектор дальности и скорости сближения БРЛС:
8 - вычислитель требуемого угла упреждения;
9 - акселерометр.
Фиг. 3 поясняет геометрические соотношения между координатами абсолютного и относительного движения наводимого ЛА и наземного объекта в горизонтальной плоскости.
Фиг. 4-15 иллюстрируют эффективность функционирования предлагаемого изобретения.
Рассмотрим, как функционирует один из возможных вариантов системы наведения ЛА на наземные объекты при использовании заявляемого способа наведения (фиг. 2).
Антенная система 1 БРЛС осуществляет пространственную селекцию сигнала, отраженного от наземного объекта, который затем поступает на вход приемника 2 БРЛС, в котором происходит выделение сигнала, отраженного от наземного объекта, на фоне шумов за счет узкополосной доплеровской фильтрации при использовании СА или ДОЛ, с выхода приемника 2 сигнал поступает на вход автоматического селектора дальности и скорости сближения 7, в котором формируются измерения дальности от наводимого ЛА до наземного объекта и скорости их сближения, а также на вход угломера 3, в котором происходит формирование измерений бортового пеленга наземного объекта и угловой скорости линии визирования в горизонтальной плоскости. При помощи акселерометра 9 измеряется собственное поперечное ускорение ЛА в горизонтальной плоскости. Сформированные измерения дальности и скорости сближения поступают в вычислитель требуемого угла упреждения 8, в котором по соотношению (4) происходит формирование требуемого угла упреждения, обеспечивающего требуемое линейное разрешение в горизонтальной плоскости. Значение требуемого угла упреждения и все сформированные измерения поступают в вычислитель сигнала управления 4, в котором по соотношению (3) формируется сигнал управления в горизонтальной плоскости. В системе управления 5 происходит преобразование сформированного сигнала управления в горизонтальной плоскости в соответствующие управляющие воздействия, которые поступают на управляющие органы самого ЛА 6.
Рассмотрим, как происходит формирование сигнала управления в горизонтальной плоскости при использовании заявляемого способа наведения в динамике.
На больших расстояниях, когда Д велика и ωГ≈ 0, управление определяется первым слагаемым (3). В такой ситуации полет ЛА будет осуществляться под углом ϕГ≈ ϕГТ к наземному объекту, обеспечивающим стабилизацию требуемого линейного разрешения в горизонтальной плоскости. При этом по мере уменьшения Д и увеличения ωГ начинает возрастать влияние второго слагаемого  (3) сигнала управления. Влияние этого слагаемого становится особенно значительным на малых расстояниях до наземного объекта. Следовательно, в процессе полета, по мере приближения ЛА к наземному объекту, происходит плавное перераспределение влияния ошибок наведения по бортовому пеленгу наземного объекта ϕГ-ϕГТ, стабилизирующих разрешающую способность в горизонтальной плоскости на начальном участке траектории наведения, к ошибкам по угловой скорости линии визирования ωГ, минимизирующим текущий промах на конечном участке траектории.
(3) сигнала управления. Влияние этого слагаемого становится особенно значительным на малых расстояниях до наземного объекта. Следовательно, в процессе полета, по мере приближения ЛА к наземному объекту, происходит плавное перераспределение влияния ошибок наведения по бортовому пеленгу наземного объекта ϕГ-ϕГТ, стабилизирующих разрешающую способность в горизонтальной плоскости на начальном участке траектории наведения, к ошибкам по угловой скорости линии визирования ωГ, минимизирующим текущий промах на конечном участке траектории.
Вес ошибок по бортовому пеленгу и угловой скорости линии визирования зависит от соотношения коэффициентов  При этом выбором kj - коэффициента, определяющего экономичность наведения, добиваются выполнения условия jГ ≅ jГДОП, при котором текущие управляющие перегрузки не превышают предельно допустимых значений. Манипулируя значениями коэффициентов qϕ и qω/ можно варьировать моментом времени перехода от преимущественного наведения по бортовому пеленгу к наведению по угловой скорости линии визирования.
При этом выбором kj - коэффициента, определяющего экономичность наведения, добиваются выполнения условия jГ ≅ jГДОП, при котором текущие управляющие перегрузки не превышают предельно допустимых значений. Манипулируя значениями коэффициентов qϕ и qω/ можно варьировать моментом времени перехода от преимущественного наведения по бортовому пеленгу к наведению по угловой скорости линии визирования.
Геометрические соотношения между координатами абсолютного и относительного движения ЛА и наземного объекта в горизонтальной плоскости при использовании предлагаемого способа наведения приведены на фиг. 3, на ней:
XOZ - земная невращающаяся система координат;
ОЛА - текущее расположение ЛА;
ОНО - текущее положение наземного объекта:
VНО - вектор, характеризующий скорость и направление движения наземного объекта;
VТ и V - требуемое и фактическое значения векторов скорости наводимого ЛА;
Д - дальность от ЛА до наземного объекта;
ϕГT - требуемое значение бортового пеленга (угла упреждения), при котором обеспечивается требуемое разрешение ΔlТ в горизонтальной плоскости:
ϕГ - фактическое значение бортового пеленга наземного объекта в горизонтальной плоскости;
jГ - поперечное ускорение ЛА в горизонтальной плоскости;
εГ - угол визирования наземного объекта в горизонтальной плоскости.
Анализируя геометрические связи абсолютных и относительных фазовых координат можно получить соотношения:
где ϕГ - бортовой пеленг наземного объекта в горизонтальной плоскости,
ωГ - угловая скорость линии визирования в горизонтальной плоскости,
Д - дальность от ЛА до наземного объекта,
VСБ - скорость сближения ЛА с наземным объектом,
jГ - поперечное ускорение ЛА в горизонтальной плоскости, - соответственно шумы возмущений по бортовому пеленгу наземного объекта и угловой скорости линии визирования. При получении (5), (6) было учтено, что
- соответственно шумы возмущений по бортовому пеленгу наземного объекта и угловой скорости линии визирования. При получении (5), (6) было учтено, что  и тот факт, что поперечное ускорение наземного объекта равно нулю.
и тот факт, что поперечное ускорение наземного объекта равно нулю.
Для оценки эффективности предлагаемого способа наведения было проведено моделирование системы наведения ЛА на наземный объект. В процессе моделирования были приняты следующие допущения:
в качестве одного из показателей качества функционирования алгоритма траекторного управления был принят текущий промах в горизонтальной плоскости, который определялся по соотношению
где Д - дальность от ЛА до наземного объекта,
ωГ - угловая скорость линии визирования в горизонтальной плоскости,
VСБ - скорость сближения ЛА с наземным объектом;
текущее значение линейного разрешения в горизонтальной плоскости определялось соотношением
где Д - дальность от ЛА до наземного объекта,
V - скорость наводимого ЛА,
λ - длина волны БРЛС,
ΔF - полоса пропускания доплеровского фильтра,
ϕГ - бортовой пеленг наземного объекта в горизонтальной плоскости,
ωГ - угловая скорость линии визирования в горизонтальной плоскости;
шумы возмущений в (5), (6) отсутствуют и управление передается безынерционно:
скорость наземного объекта равна нулю.
Целью моделирования являлось исследование возможностей предложенного способа наведения по обеспечению требуемого линейного разрешения в горизонтальной плоскости и требуемой точности наведения. Исследование проводилось в несколько этапов. На первом этапе исследовалось влияние величин коэффициентов qϕ,qω и kj, учитывающих требования к точности и экономичности, на функционирование алгоритма траекторного управления. На втором этапе исследовалось влияние величины требуемого линейного разрешения ΔlT.
Исследования производились посредством моделирования во времени следующих зависимостей: Д - дальности от ЛА до наземного объекта, ϕГ - бортового пеленга наземного объекта в горизонтальной плоскости, ωГ - угловой скорости линии визирования в горизонтальной плоскости, ΔГ - параметра рассогласования в горизонтальной плоскости, Δl - текущего линейного разрешения, h - текущего промаха и x, z - координат ЛА в земной неподвижной системе координат XOZ. При этом ϕГ и ωГ и вычислялись по (5), (6) с использованием метода Эйлера первого порядка, сигнал управления - по (3), (4), текущее линейное разрешение - по (8), текущий промах - по (7), а текущее местоположение ЛА определялось путем счисления координат.
При моделировании полагалось (если специально не оговорено), что начальное значение дальности от ЛА до наземного объекта Д0 = 15 000 м, начальное положение ЛА в плоскости XOZ определялось координатами x0 = 15 000 м, Z0 = 0 м, положение наземного объекта определялось координатами xНО = 0 м, ZНО = 0 м, длина волны БРЛС λ = 0,008 м, полоса пропускания доплеровского фильтра ΔF = 40 Гц, требуемое линейное разрешение в горизонтальной плоскости ΔlT = 10 м.
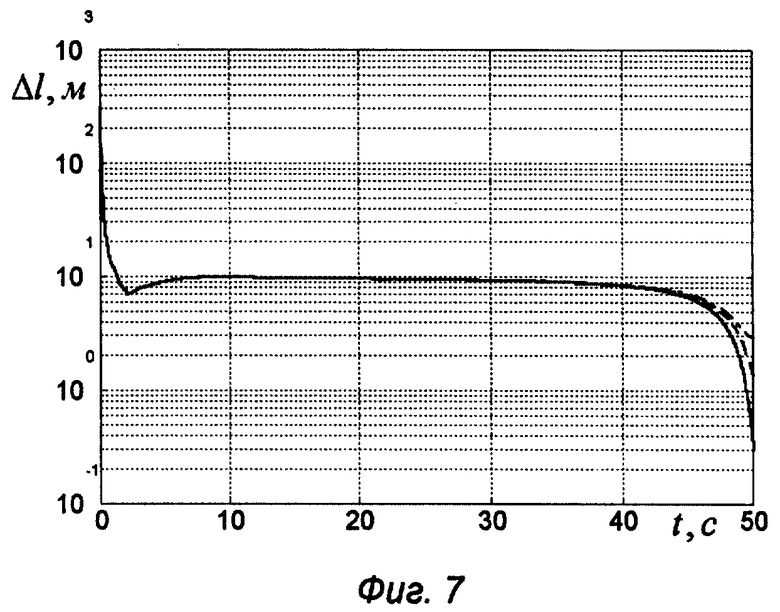
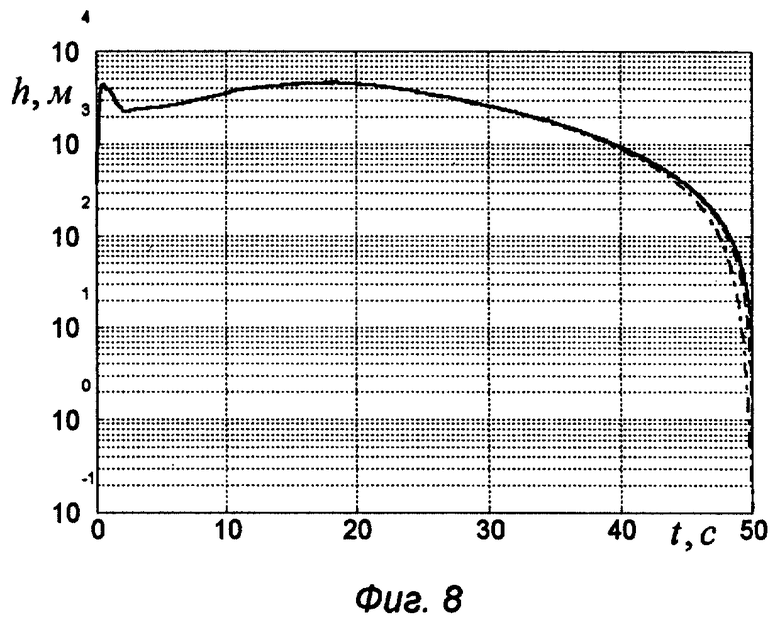
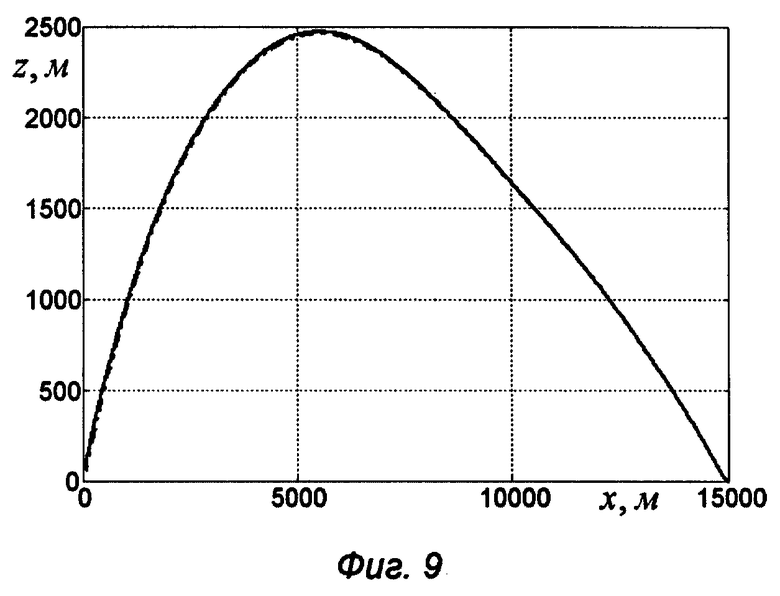
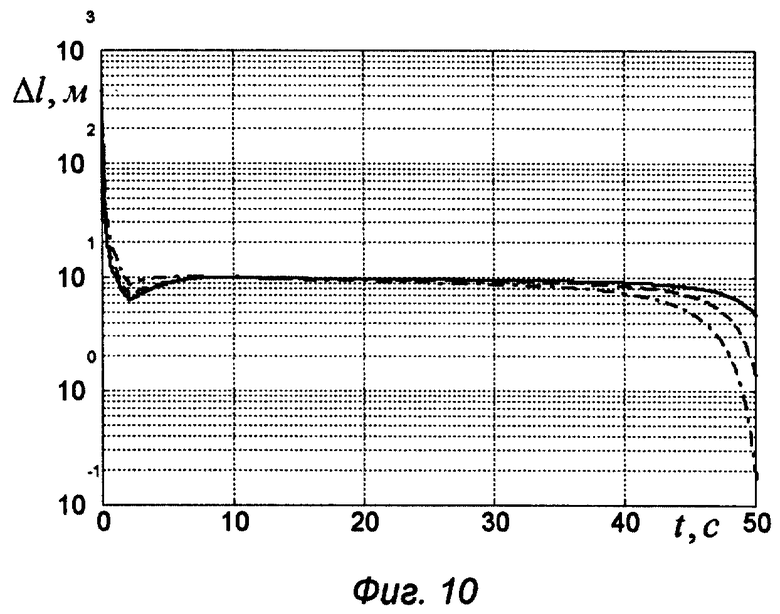
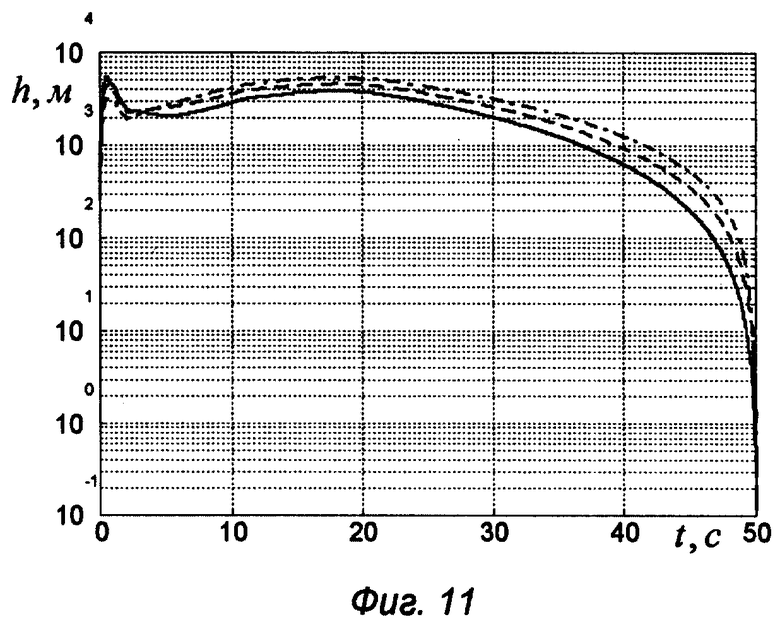
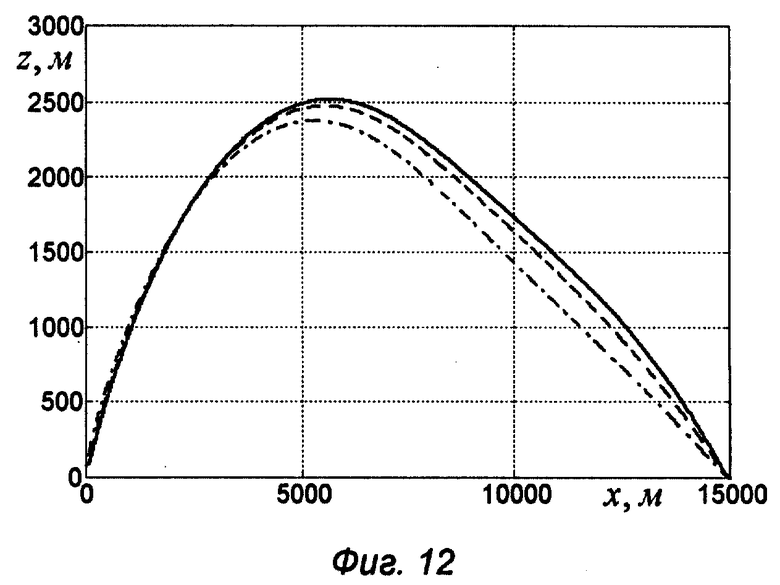
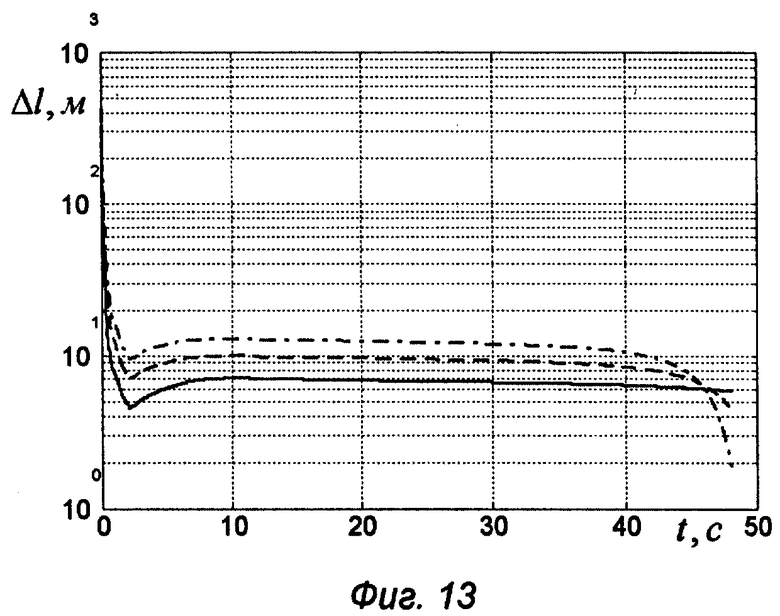
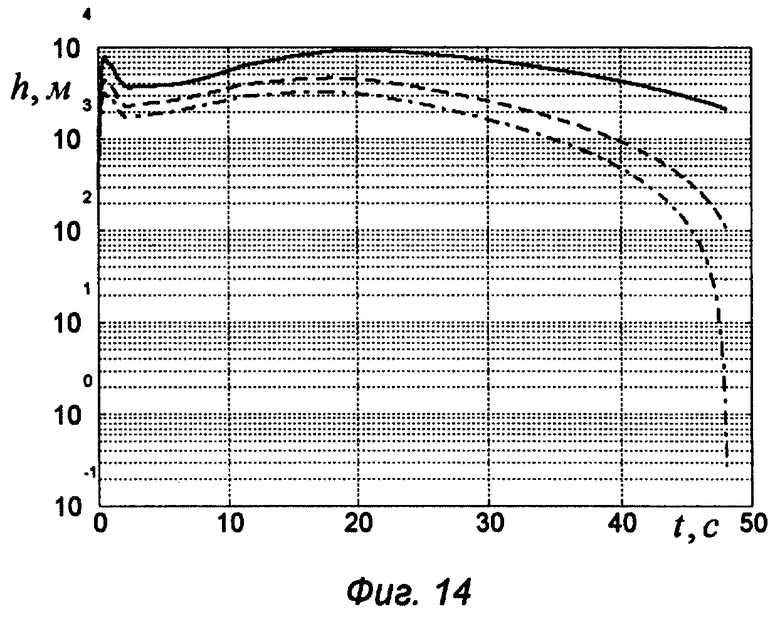
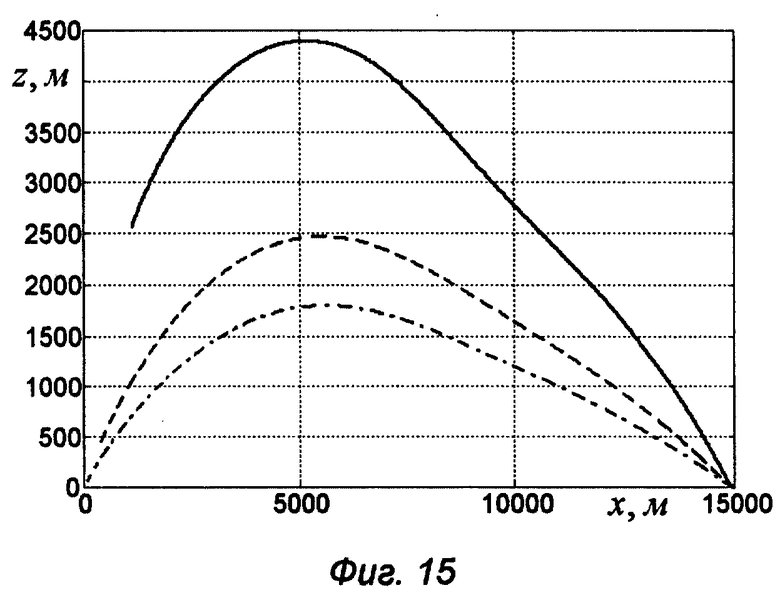
Результаты моделирования приведены на фиг. 4-15: на фиг. 4, 7, 10, 13 приведены зависимости текущего линейного разрешения Δl от времени наведения, на фиг. 5, 8, 11, 14 - зависимости текущего промаха h от времени наведения, а на фиг. 6, 9, 12, 15 - траектории наведения в системе координат XOZ.
На фиг. 4 - 6 приведены результаты исследований влияния коэффициента qϕ, определяющего точность наведения по бортовому пеленгу на функционирование алгоритма траекторного управления. На этих фигурах сплошная линия соответствует qϕ= qϕ1, пунктирная - qϕ= qϕ2, штрихпунктирная - qϕ= qϕ3(qϕ1<qϕ2<qϕ3). На фиг. 7 - 9 приведены результаты исследований влияния коэффициента qω, определяющего точность наведения по угловой скорости линии визирования на основные показатели функционирования алгоритма траекторного управления. На этих фигурах сплошной линии соответствует qω= qω1, пунктирной -  штрихпунктирной - qω= qω3(qω1<qω2<qω3). На фиг. 10-12 приведены результаты исследований влияния коэффициента kj, определяющего экономичность наведения на функционирование алгоритма траекторного управления. На этих фигурах сплошная линия соответствует kj=kj1, пунктирная - kj= kj2, штрихпунктирная - kj = kj3 (kj1 < kj2 < kj3).
штрихпунктирной - qω= qω3(qω1<qω2<qω3). На фиг. 10-12 приведены результаты исследований влияния коэффициента kj, определяющего экономичность наведения на функционирование алгоритма траекторного управления. На этих фигурах сплошная линия соответствует kj=kj1, пунктирная - kj= kj2, штрихпунктирная - kj = kj3 (kj1 < kj2 < kj3).
Анализ результатов первого этапа исследований позволяет сделать следующие выводы:
увеличение коэффициента qϕ приводит к более быстрой отработке начальных ошибок по бортовому пеленгу, при этом возрастает значение сигнала управления на начальном этапе, как следствие этого траектория ракеты больше отклоняется от прямолинейной, при этом более продолжительно стабилизируется требуемое линейное разрешение:
увеличение коэффициента qω практически не влияет на начальный участок наведения, однако на конечном участке приводит к более быстрому стремлению текущего значения угловой скорости линии визирования к требуемому нулевому значению (при ωГ = 0 текущий промах равен нулю (7)), тем самым более быстро выбирается текущий промах, при этом в целом на траекторию наведения qω влияет мало:
величина коэффициента kj, поскольку он входит как в вес ошибки наведения по бортовому пеленгу, так и в вес ошибки наведения по угловой скорости линии визирования, оказывает влияние на всем протяжении участка наведения ЛА. При этом уменьшение kj на начальном этапе приводит к более быстрой отработке начальных ошибок по требуемому бортовому пеленгу, а на конечном - к более быстрой отработке ошибок по угловой скорости линии визирования. Все эти обстоятельства приводят к тому, что лучше стабилизируется требуемое значение линейного разрешения, причем на начальном участке траектория наведения более сильно отклоняется от прямолинейной, а на конечном - ЛА быстрее выводится на наземный объект.
Результаты исследований влияния величины требуемого линейного разрешения ΔlT на функционирование алгоритма траекторного управления приведены на фиг. 13-15. На этих фигурах сплошная линия соответствует ΔlT = 7 м, пунктирная ΔlT = 10 м, штрихпунктирная - ΔlT = 13 м. Анализ результатов второго этапа исследований позволяет сделать следующее заключение: уменьшение требуемого разрешения ΔlT существенным образом увеличивает отклонение траектории ЛА от прямолинейной - так, при ΔlT = 13 м максимальное боковое отклонение от прямолинейной траектории составляет zmax ≈ 1750 м, при ΔlT= 10м-zmax≈ 2400 м, а при ΔlT= 7м-zmax≈ 4250 м.
В целом по результатам моделирования заявляемого способа наведения можно сделать следующие выводы.
Результаты моделирования подтвердили работоспособность предлагаемого способа наведения ЛА на наземные объекты.
Предлагаемый способ позволяет обеспечить на начальном участке наведения стабилизацию требуемого линейного разрешения в горизонтальной плоскости, а на конечном участке минимизацию текущего промаха ЛА.
Варьирование величинами коэффициентов, учитывающих требования к точности и экономичности, дает возможность достаточно просто и плавно перераспределять приоритеты в наведении между обеспечением требуемого линейного разрешения по азимуту в горизонтальной плоскости и допустимыми промахами ЛА и позволяет достичь приемлемого качества функционирования предлагаемого способа наведения в целом.
Использование изобретения по сравнению с прототипом за счет введения дополнительного адаптивного угла упреждения и коэффициентов усиления, адаптивно учитывающих условия применения, а также требования к точности и экономичности процесса наведения позволит, как показало моделирование, одновременно обеспечить высокую точность и экономичность наведения при стабилизации требуемого линейного разрешения по азимуту в горизонтальной плоскости при использовании в БРЛС режимов СА или ДОЛ.
Кроме того, использование заявленного способа наведения ЛА на наземные объекты не налагает никаких дополнительных ограничений на элементную базу и не предъявляет никаких существенных требований к быстродействию и объему памяти вычислителей.
Литература
1. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления, ч.1, ч.2. - М.: Радио и связь, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2003 |
|
RU2229671C1 |
| УНИВЕРСАЛЬНЫЙ СПОСОБ НАВЕДЕНИЯ САМОЛЕТОВ НА НАЗЕМНЫЕ ЦЕЛИ | 2002 |
|
RU2210801C1 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2004 |
|
RU2261411C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОТДЕЛЬНУЮ ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ ЦЕЛЕЙ | 2003 |
|
RU2253082C1 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
| СПОСОБ ПРИВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА К НАЗЕМНОМУ ОБЪЕКТУ | 2012 |
|
RU2521890C2 |
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
Способ предназначен для самонаведения летательных аппаратов (ЛА) с бортовыми радиолокационными станциями (БРЛС), использующими синтезирование апертуры (СА) антенны или доплеровское обужение луча (ДОЛ) диаграммы направленности антенны на наземные объекты. Способ заключается в измерении значений дальности от наводимого ЛА до наземного объекта, скорости сближения наводимого ЛА и наземного объекта, бортового пеленга наземного объекта и угловой скорости линии визирования в горизонтальной плоскости, а также поперечного ускорения наводимого ЛА в горизонтальной плоскости, формировании сигнала управления в горизонтальной плоскости в виде суммы взвешенной на переменный коэффициент усиления разности требуемого угла упреждения и бортового пеленга наземного объекта и взвешенной на переменный коэффициент усиления угловой скорости линии визирования и значения ускорения наводимого ЛА. Значения переменных коэффициентов вычисляются с учетом текущих значений дальности от наводимого ЛА до наземного объекта и их скорости сближения, а также коэффициентов, определяющих точность наведения по бортовому пеленгу наземного объекта и угловой скорости линии визирования, а также определяющих экономичность процесса наведения, а значения требуемого угла упреждения формируются специальным образом так, чтобы учесть условия применения и обеспечить стабилизацию требуемого линейного разрешения в горизонтальной плоскости. Использование предлагаемого способа наведения позволяет обеспечить одновременно высокую точность и экономичность наведения, а также стабилизировать требуемое линейное разрешение в горизонтальной плоскости при наведении ЛА на наземные объекты с помощью БРЛС при использовании СА или ДОЛ. 15 ил.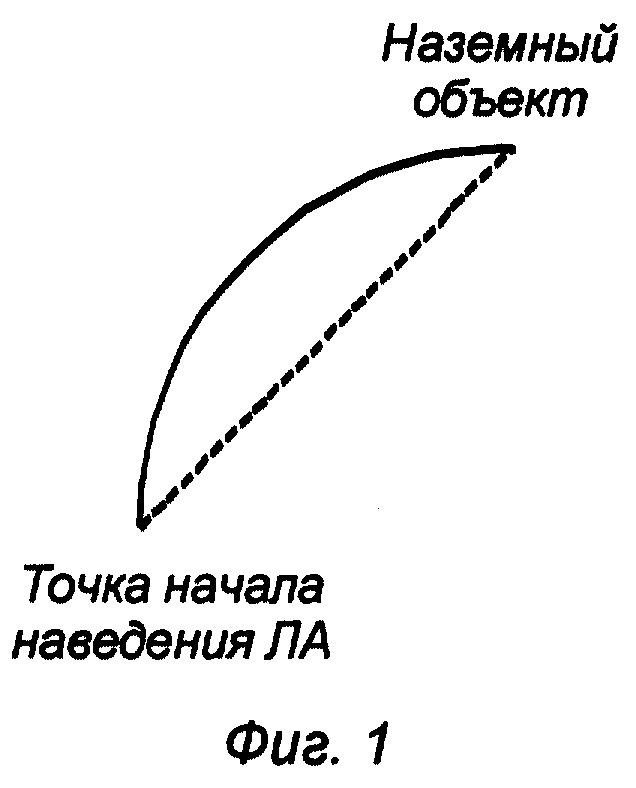
Способ наведения летательных аппаратов на наземные объекты, заключающийся в том, что измеряют значения бортового пеленга наземного объекта и угловой скорости линии визирования в горизонтальной плоскости, формируют сигнал управления в горизонтальной плоскости в виде суммы взвешенных на соответствующие коэффициенты усиления значений бортового пеленга наземного объекта и угловой скорости линии визирования в горизонтальной плоскости, отличающийся тем, что измеряют значения дальности от наводимого летательного аппарата (ЛА) до наземного объекта и скорости их сближения, а также значения скорости наводимого ЛА и его ускорения в горизонтальной плоскости, формируют сигнал управления в горизонтальной плоскости по соотношению
где ΔГ - сигнал управления в горизонтальной плоскости;
qϕГ, qωГ - коэффициенты, определяющие точность наведения по бортовому пеленгу и угловой скорости линии визирования в горизонтальной плоскости;
kjГ - коэффициент, определяющий экономичность наведения в горизонтальной плоскости;
Д - значение дальности от наводимого ЛА до наземного объекта;
VСБ - значение скорости сближения наводимого ЛА с наземным объектом;
ϕГ - значение бортового пеленга в горизонтальной плоскости;
ωГ - значение угловой скорости линии визирования в горизонтальной плоскости;
jГ - значение поперечного ускорения наводимого ЛА в горизонтальной плоскости;
ϕГТ - требуемый угол упреждения, обеспечивающий требуемое линейное разрешение в горизонтальной плоскости, который рассчитывают по соотношению
где λ - длина волны бортовой радиолокационной станции;
ΔF - полоса пропускания доплеровского фильтра;
V - значение скорости наводимого ЛА;
ΔlТ - требуемое линейное разрешение в горизонтальной плоскости.
| МЕРКУЛОВ В.И., ЛЕПИН В.Н | |||
| Авиационные системы радиоуправления, ч.1 | |||
| - М.: Радио и связь, 1997, с | |||
| Затвор для дверей холодильных камер | 1920 |
|
SU182A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ САМОНАВОДЯЩЕЙСЯ РАКЕТЫ КЛАССА ВОЗДУХ - ПОВЕРХНОСТЬ | 1997 |
|
RU2111439C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| СПОСОБ ПРОВЕДЕНИЯ СОСТЯЗАНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2261133C1 |
| US 4542870 A, 24.09.1985 | |||
| US 4898341 A, 06.02.1990 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
| DE 3643975 A1, 30.06.1988. | |||

