Изобретение относится к области радиоуправления и может быть использовано в радиоэлектронных системах самонаведения управляемых ракет. Известен способ формирования сигнала управления ракетой при наведении на воздушную цель (ВЦ), заключающийся в приеме отраженного от ВЦ сигнала, суммировании его сигналом целеуказания, формировании сигнала управления для автопилота ракетой и сигнала управления антенной радиолокационной головки самонаведение (РГС) и [1]
Известно устройство формирования сигнала управления ракетой при наведении на ВЦ, содержащее блок задержки и последовательно соединенные антенну, сумматор, блок обработки и автопилот, причем второй вход сумматора является входом целеуказания, а управляющий вход антенны через блок задержки соединен с выходом блока обработки [1]
Недостатком данных способа и устройства являются низкая информативность сигнала управления ракетой, которая (информативность) не позволяет вывести ракету, находящуюся на этапе самонаведения вне зоны распознавания в ее РГС класса цели на основе анализа сигналов вторичной модуляции, в границы этой зоны.
Наиболее близким к изобретению является способ формирования сигнала управления ракетой при наведении на ВЦ, заключающийся в формировании сигналов управления в вертикальной (в) и горизонтальной (г) плоскостях с дальности захвата цели РГС до встречи ракеты с целью, определяемые соотношениями
где N0 навигационная постоянная;
V скорость сближения ракеты с целью;
Wв, Wг угловые скорости вращения линии визирования "ракета-цель" соответственно в вертикальной и горизонтальной плоскостях;
Jв, Jг линейные ускорения, развиваемые ракетой соответственно в вертикальной (нормальное) и горизонтальной (боковое) плоскостях [2]
Наиболее близким к изобретению является устройство формирования сигнала управления ракетой при наведении на ВЦ, содержащее антенну, пеленгатор, гидростабилизатор (ГС), автопилот вертикальные и горизонтальные рули, канал формирования сигнала управления в вертикальной плоскости, состоящий из последовательно соединенных первого усилителя мощности (УМ), первого блока согласования (БС), первого масштабирующего усилителя (МУ) и первого умножителя, канал формирования сигнала управления в горизонтальной плоскости, состоящий из последовательно соединенных второго УМ и второго БС, а также последовательно соединенных второго МУ и второго умножителя, причем входы первого и второго УМ соединены соответственно с первым и вторым выходами пеленгатора, первый, второй и третий входы которого соединены соответственно с первым, вторым и третьим выдохами антенны, первый и второй механические входы который соединены соответственно с первым и вторым механическими выходами ГС, первый и второй входы которого соединены с выходами соответственно первого и второго УМ, вторые входы первого и второго умножителей объединены и соединены с выходом измерителя скорости сближения ракеты с целью, а их выходы - соответственно с первым и вторым входами автопилота, первый и второй выходы которого соединены соответственно с вертикальными и горизонтальными рулями ракеты [2]
Недостатком способа и устройства является низкая информативность сигнала управления ракетой. Это обусловлено тем, что информативность существующего сигнала управления не позволяет вывести ракету, находящуюся на этапе самонаведения вне зоны распознавания в ее РГС класса цели на основе анализа сигналов вторичной модуляции, в границы этой зоны.
Известно [3] что одним из признаков, по которому распознают класс ВЦ, является вид радиолокационного сигнала, отраженного от вращающихся частей ее двигательной установки (вторичная модуляция отраженного сигнала). При этом сигналы вторичной модуляции имеют ракурсную зависимость. Каждая ВЦ характеризуется наличием заданного (граничного) угла (ракурса радиолокационного наблюдения) Φцз при котором еще возможно наблюдение сигналом, отраженных от вращающихся частей двигательной установки цели. Угол Φцз образует в пространстве объемную фигуру, так называемую зону распознавания класса цели, сечение которой в горизонтальной плоскости представляет собой равнобедренный треугольник с вершиной, определяемой местоположением ВЦ (фиг. 1).
При известном способе формирования сигнала управления ракетой на всем участке самонаведения угловая скорость вращения линии визирования в горизонтальной плоскости Wг стремиться к нулю [2] Поэтому если ракета наводится на ВЦ, летящую под ракурсом Φц > Φцз где Φц угол (ракурс радиолокационного наблюдения отраженных от цели сигнала) между вектором скорости ВЦ и линией визирования, то она от момента захвата цели РГС до встречи с ней будет находиться вне зоны распознавания класса цели.
Следовательно, информативность сигнала управления при данных способе и устройстве формирования сигнала управления ракетой не позволяет самостоятельно попасть ракете в зону распознавания класса цели на основе анализа сигналов вторичной модуляции при нахождении ее вне этой зоны на начальном участке самонаведения.
Цель изобретения повышение информативности сигнала управления ракетой при наведении ее на воздушную цель.
Указанная цель достигается тем, что в способе формирования сигнала управления ракетой, заключающимся в формировании сигнала управления ракетой в вертикальной плоскости с дальности захвата цели РГС до встречи ракеты с целью и формировании сигнала управления ракетой в горизонтальной плоскости с границей зоны распознавания класса цели, до встречи ракеты с целью, причем сигнал управления в вертикальной и горизонтальной плоскостях определяется соответственно соотношениями (1), (2), дополнительно с дальности захвата цели на автосопровождение РГС ракеты до границы зоны распознавания класса цели, формирует сигнал управления ракетой в горизонтальной плоскости, определяемый соотношением
где 

Vц, Vр скорость цели и ракеты соответственно;
Φцо, Φцз, Φц начальный (на дальности захвата цели РГС ракеты), заданный и текущий угол (ракурс радиолокационного наблюдения отраженных от цели сигналов) между вектором скорости цели и линии визирования соответственно;
Φро, Φрк, Φрт начальный (на дальности захвата цели РГС ракеты), конечный (на границе зоны распознавания класса цели (при входе в нее ракеты)) и требуемый угол между вектором скорости ракеты и линией визирования;
D текущее значение дальности между ракетой и целью.
Кроме того, указанная цель достигается тем, что в устройство формирования сигнала управления ракетой, содержащее антенну, пеленгатор, ГС, автопилот, вертикальные и горизонтальные рули, канал формирования сигнала управления в вертикальной плоскости, состоящий из последовательно соединенных первого УМ, первого БС, первого МУ и первого умножителя, канал формирования сигнала управления в горизонтальной плоскости, состоящий из последовательно соединенных второго УМ и второго БС, а также последовательно соединенных второго МУ и второго умножителя, причем входы первого и второго УМ соединены соответственно с первым и вторым выходами пеленгатора, первый, второй и третий входы которого соединены соответственно с первым, вторым и третьим выходами антенны, первый и второй механические входы которой соединены соответственно с первым и вторым механическими выходами ГС, первый и второй входы которого соединены с выходами соответственно первого и второго УМ, вторые входы первого и второго умножителей объединены и соединены с выходом измерителя скорости сближения ракеты с целью, а их выходы соответственно с первым и вторым входами автопилота, первый и второй выход которого соединены соответственно с вертикальными и горизонтальными рулями ракеты, дополнительно введен в канал формирования сигнала управления в горизонтальной плоскости вычислитель требуемой угловой скорости вращения линии визирования, первый вход которого соединен с выходом второго БС, второй вход с выходом измерителя дальности, третий вход с выходом измерителя скорости сближения ракеты с целью, четвертый вход с выходом измерителя собственной скорости ракеты, пятый вход с выходом датчика ориентации диаграммы направленности антенны, а выход с входом второго МУ, вычислитель требуемой угловой скорости вращения линии визирования состоит из вычислителя требуемого угла, вычислителя параметров движения цели, первого и второго функциональных преобразователей (ФП), третьего и четвертого умножителей, первого вычитающего устройства (ВУ), первого блока деления, первого блока логических элементов И, цифроаналогового преобразователя (ЦАП) и первого устройства сравнения (УС), причем первые входы вычислителя требуемого угла, третьего умножителя и вычислителя параметров движения цели объединены и подключены к четвертому входу вычислителя требуемой угловой скорости вращения линии визирования, второй вход вычислителя параметров движения цели подключен к пятому входу вычислителя требуемой угловой скорости вращения линии визирования, третий вход вычислителя параметром движения цели и первый вход первого блока деления объединены и подключены к второму входу вычислителя требуемой угловой скорости вращения линии визирования, первый вход первого УС и пятый вход вычислителя параметров движения цели объединены и подключены к первому входу вычислителя требуемой угловой скорости вращения линии визирования, первый выход вычислителя требуемого угла через первый ФП соединен с вторым входом третьего умножителя, выход которого соединен с первым входом первого ВУ, второй вход которого соединен с выходом четвертого умножителя, первый вход которого объединен с третьим входом вычислителя требуемого угла и соединен с первым выходом вычислителя параметров движения цели, второй выход которого объединен с вторым входом вычислителя требуемого угла и через второй ФП соединен с вторым входом четвертого умножителя, четвертый вход вычислителя параметров движения цели подключен к третьему входу вычислителя требуемой угловой скорости вращения линии визирования, выход первого ВУ соединен с вторым входом первого блока деления, выход которого соединен с первым входом первого блока логических элементов И, второй вход которого соединен с вторым выходом вычислителя требуемого угла, а выход через ЦАП соединен с вторым входом устройства сравнения, выход которого является выходом вычислителя требуемой угловой скорости вращения линии визирования.
Кроме того, вычислитель требуемого угла содержит второй и третий блоки деления, третий и четвертый ФП, второй, третий, четвертый, пятый и шестой блоки логических элементов И, первый, второй, третий и четвертый перепрограммируемые запоминающие устройства (ППЗУ), пятый и шестой умножители, второе, третье и четвертое ВУ, первый сумматор, второе и третье УС, первое и второе постоянные запоминающие устройства (ПЗУ), логический элемент НЕ, логический элемент ИЛИ, причем первый вход второго ВУ и вход четвертого ФП объединены и соединены с выходом четвертого ППЗУ, вход которого является входом ввода заданного угла Φвц между вектором скорости цели и линией визирования, второй вход второго ВУ соединен с вторым входом вычислителя требуемого угла, а выход соединен с первыми входами пятого умножителя, четвертого блока логических элементов И, четвертого ВУ и второго УС, второй вход которого соединен с корпусом РГС, что соответствует наличию на этом входе уровня логического нуля, второй вход четвертого ВУ соединен с выходом первого ПЗУ, выход второго УС соединен с первыми входами второго, третьего и вторым входом четвертого блоков логических элементов И и является вторым выходом вычислителя требуемого угла, выход четвертого ФП соединен с первым входом шестого умножителя, второй вход которого является третьим входом вычислителя требуемого угла, а выход соединен с первым входом второго блока деления, второй вход которого через первое ППЗУ соединен с выходом второго блока логических элементов И, второй вход которого является первым входом вычислителя требуемого угла, выход второго блока деления через третий ФП соединен с первыми входами первого сумматора и третьего ВУ, второй вход которого через второе ППЗУ соединен с выходом третьего блока логических элементов И, второй вход которого соединен с выходом логического элемента ИЛИ, первый и второй входы которого соединены соответственно с выходами пятого и шестого блоков логических элементов И, второй вход пятого блока логических элементов И, объединен через логический элемент НЕ с первым входом шестого блока логических элементов И и соединен с выходом третьего УС, первый вход которого объединен с первым входом пятого блока логических элементов И и соединен с выходом четвертого ВУ, а второй вход объединен с вторым входом шестого блока логических элементов И и соединен с выход второго ПЗУ, выход третьего ВУ соединен с первым входом третьего блока деления, второй вход которого через третье ППЗУ соединен с выходом четвертого блока логических элементов И, выход третьего блока давления соединен с вторым входом пятого умножителя, выход которого соединен с вторым входом первого сумматора, выход которого является первым выходом вычислителя требуемого угла.
Кроме того, вычислитель параметров движения цели содержит пятый, шестой и седьмой ФП, седьмой, восьмой и девятый умножители, третий МУ, пятое, шестое и седьмое ВУ, второй сумматор, четвертый блок деления, причем входы пятого и шестого ФП объединены и являются вторым входом вычислителя, а их выходы соединены соответственно с первыми входами седьмого и девятого умножителя, вторые входы которых объединены и являются первым входом вычислителя, а их выходы соединены соответственно с первым входом пятого ВУ и объединенными вторыми входами пятого и шестого ВУ, выход пятого ВУ соединен с первым выходом второго сумматора, второй выход которого объединен с первым выходом шестого ВУ и является четвертым входом вычислителя, выход второго сумматора соединен с первым входом седьмого ВУ, второй вход которого соединен с выходом восьмого умножителя, первый и второй входы которого являются соответственно третьим и пятым входами вычислителя, выход седьмого ВУ соединен с входом третьего МУ, выход которого соединен с первым входом четвертого блока деления и является первым выходом вычислителя, второй вход четвертого блока деления соединен с выходом шестого ВУ, а его выход с входом седьмого ФП, выход которого является вторым выходом вычислителя.
Новыми признаками, обладающими существенными отличиями являются:
1. С дальностью захвата цели РГС до границы зоны распознавания класса цели формируют сигнал управления ракетой в горизонтальной плоскости, определяемый соотношением (3).
2. Вычислитель требуемой угловой скорости вращения линии визирования "ракета-цель".
3. Вычислитель требуемого угла отклонения вектора скорости ракеты.
4. Вычислитель параметров движения цели.
5. Новые связи между известными и новыми признаками, т.е. новая схема устройства формирования сигнала управления ракетой в целом.
Данные признаки обладают существенными отличиями, т.к. в известных способах и их технических решениях не обнаружены.
Использование всех новых признаков позволяет повысить информативность сигнала управления ракетой при ее наведении на ВЦ за счет формирования сигнала управления ракетой в горизонтальной плоскости, определяемого соотношением (3), и применения его с момента захвата цели РГС до границы зоны распознавания класса цели путем введения в устройство формирования сигнала управления ракетой вычислителя требуемой угловой скорости вращения линии визирования, вычислителя требуемого угла отклонения вектора скорости ракеты и вычислителя параметров движения цели.
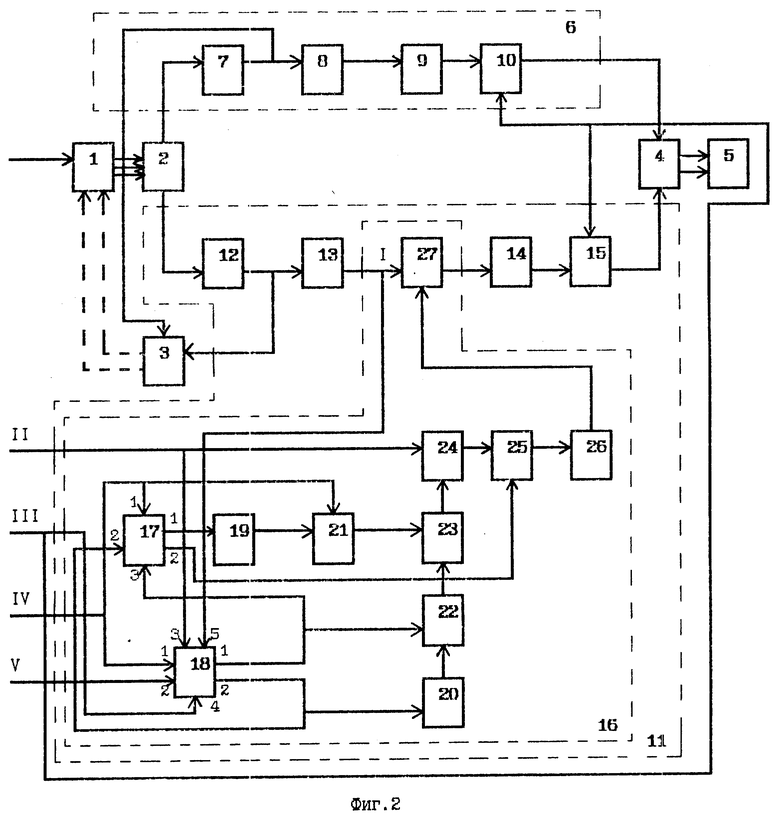
На фиг. 1 приведена кинематическая схема самонаведения ракеты на ВЦ; на фиг. 2 блок-схема устройства для предложенного способа формирования сигнала управления ракетой; на фиг.3 блок-схема вычислителя требуемого угла отклонения вектора скорости ракеты; на фиг.4 блок-схема вычислителя параметров движения цели.
Устройство для осуществления предложенного способа формирования сигнала управления ракетой содержит (фиг.2) антенну 1, пеленгатор 2, ГС 3, автопилот 4, вертикальные и горизонтальные рули 5, канал 6 формирования сигнала управления в вертикальной плоскости, состоящий из последовательно соединенных первого УМ 7, первого ВС 8, первого МУ 9 и первого умножителя 10, канал 11 формирования сигнала управления в горизонтальной плоскости, состоящий из последовательно соединенных второго УМ 12 и второго ВС, а также последовательно соединенных второго МУ 14 и второго умножителя 15, входы первого 7 и второго 12 УМ соединены соответственно с первым и вторым выходами пеленгатора 2, первый, второй и третий входы которого соединены соответственно с первым, вторым и третьим выходами антенны 1, первый и второй механические входы которой соединены соответственно с первым и вторым механическими выходами ГС 3, первый и второй входы которого соединен с выходами соответственно первого 7 и второго 12 УМ, вторые входы первого 10 и второго 15 умножителей объединены и соединены с выходом измерителя скорости сближения ракеты с целью (на схеме не показан), а их выходы соответственно с первым и вторым входами автопилота 4, первый и второй выходы которого соединены соответственно с вертикальными и горизонтальными рулями ракеты 5, а также содержит вычислитель 16 требуемой угловой скорости вращения линии визирования, первый вход которого соединен с выходом второго ВС 13, второй вход с выходом измерителя дальности, третий вход с выходом измерителя скорости сближения ракеты с целью, четвертый вход с выходом измерителя собственной скорости ракеты, пятый вход с выходом датчика ориентации диаграммы направленности антенны (измерители и датчики на схеме не показано), а выход с входом второго МУ 14, вычислитель 16 требуемой угол скорости вращения линии визирования состоит из вычислителя 17 требуемого угла, вычислителя 18 параметров движения цели, первого 19 и второго 20 ФП, третьего 21 и четвертого 22 умножителей, первого ВУ 23, первого блока давления 24, первого блока логических элементов и 25, ЦАП 26и первого УС 27, причем первые входы вычислителя 17 требуемого угла, третьего умножителя 21 и вычислителя 18 параметров движения цели объединены и подключены к четвертому входу вычислителя 16 требуемой угловой скорости вращения линии визирования, второй вход вычислителя 18 параметров движения цели подключен к пятому входу вычислителя 16 требуемой угловой скорости вращения линии визирования, третий вход вычислителя 18 параметров движения цели и первый вход первого блока деления 24 объединены и подключены ко второму входу вычислителя 16 требуемой угловой скорости вращения линии визирования, первый вход первого устройства сравнения 27 и пятый вход вычислителя 18 параметров движения цели объединены и подключены к первому входу вычислителя 16 требуемой угловой скорости вращения линии визирования, первый выход вычислителя 17 требуемого угла через первый ФП 19 соединен с вторым входом третьего умножителя 21, выход которого соединен с первым входом первого ВУ 23, второй вход которого соединен с выходом четвертого умножителя 22, первый вход которого объединен с третьим входом вычислителя 17 требуемого угла и соединен с первым выходом вычислителя 18 параметров движения цели, второй выход которого объединен с вторым входом вычислителя 17 требуемого угла, и через второй ФП 20 соединен с вторым входом четвертого умножителя 22, четвертый вход вычислителя 18 параметров движения цели подключен к третьему входу вычислителя 16 требуемой угловой скорости вращения линии визирования, выход первого ВУ 23 соединен с вторым входом первого блока деления 24, выход которого соединен с первым входом первого блока логических элементов И 25, второй вход которого соединен с вторым выходом вычислителя 17 требуемого угла, а выход через ЦАП 26 соединен с вторым входом УС 27, выход которого является выходом вычислителя 16 требуемой угловой скорости вращения линии визирования.
Вычислитель 17 требуемого угла (фиг.3), содержит второй 28 и третий 29 блоки деления, третий 30 и четвертый 31 ФП, второй 32, третий 33, четвертый 35 и шестой 36 блоки логических элементов И, первое 37, второе 38, третье 39 и четвертое 40 ППЗУ, пятый 41 и шестой 42 умножители, второе 43, третье 44 и четвертое 45 ВУ, первый сумматор 46, второе 47 и третье 48 УС, первое 49 и второе 50 ПЗУ, логический элемент НЕ 51, логический элемент ИЛИ 52, причем первый вход второго ВУ 43 и вход четвертого ФП 31 объединены и соединены с выходом четвертого ППЗУ 40, вход которого является входом ввода заданного угла Φвц между вектором скорости цели и линией визирования, второй вход второго ВУ 43 соединен с вторым входом вычислителя 17 требуемого угла, а выход соединен с первыми входами пятого умножителя 41, четвертого блока логических элементов И 34, четвертого ВУ 45, второй вход которого соединен с выходом первого ПЗУ 49, и второго УС 47, второй вход которого соединен с корпусом РГС, что соответствует наличию на этом входе уровня логического нуля, выход второго УС соединен с первыми входами второго 32, третьего 33 и вторым входом четвертого 34 блоков логических элементов И и является вторым выходом вычислителя 17 требуемого угла, выход четвертого ФП 31 соединен с первым входом шестого умножителя 42, второй вход которого является третьим входом вычислителя 17 требуемого угла, а выход соединен с первым входом второго блока деления 28, второй вход которого через первое ППЗУ 37 соединен с выходом второго блока логических элементов И 32, второй вход которого является первым входом вычислителя 17 требуемого угла, выход второго блока деления 28 через третий ФП 30 соединен с первыми входами первого сумматора 46 и третьего ВУ 44, второй вход которого через второе ППЗУ 38 соединен с выходом третьего блока логических элементов И 33, второй вход которого соединен с выходом логического элемента ИЛИ 52, первый и второй входы которого соединены соответственно с выходами пятого 35 и шестого 36 блоков логических элементов И, второй вход пятого блока логических элементов И 45 объединен через логический элемент НЕ 51 с первым входом шестого блока логических элементов И 36 и соединен с выходом третьего УС 48, первый вход которого объединен с первым входом пятого блока логических элементов И 35 и соединен с выходом четвертому ВУ 45, а второй вход объединен со вторым входом шестого блока логических элементов И 36 и соединен с выходом второго ПЗУ 50, выход третьего ВУ 44 соединен с первым входом третьего блока деления 29, второй вход которого через третье ППЗУ 39 соединен с выходом четвертого блока логических элементов И 34, выход третьего блока 29 деления соединен с вторым входом пятого умножителя 41, выход которого соединен с вторым входом первого сумматора 46, выход которого является первым выходом вычислителя 17 требуемого угла.
Вычислитель 18 параметров движения цели (фиг.4) содержит пятый 52, шестой 54 и седьмой 55 ФП, седьмой 56, восьмой 57 и десятый 58 умножители, третий МУ 59, пятое 60, шестой 61 и седьмое 62 ВУ, второй сумматор 63, четвертый блок деления 64, причем входы пятого 53 и шестого 54 ФП объединены и являются вторым входом вычислителя, а их выходы соединены соответственно с первыми входами седьмого 56 и девятого 58 умножителей, вторые входы которых объединены и являются первым входом вычеслителя 18, а их выходы соединены соответственно с первым входом пятого ВУ 60 и объединенными вторыми входами пятого 60 и шестого 61 ВУ, выход пятого ВУ 60 соединен с первым входом второго сумматора 63, второй вход которого объединен с первым входом шестого ВУ 61 и является четвертым входом вычислителя 18, выход второго сумматора 63 соединен с первым входом седьмого ВУ 62, второй вход которого соединен с выходом восьмого умножителя 57, первый и второй входы которого являются соответственно третьим и пятым входами вычислителя 18, выход седьмого ВУ 62 соединен с входом третьего МУ 59, а его выход соединен с первым входом четвертого блока деления 64 и является первым выходом вычислителя 18, второй вход четвертого блока деления 64 соединен с выходом шестого ВУ 61, а его выход с входом седьмого ФП 55, выход которого являются вторым выходом вычислителя 18.
Первый 8 и второй 13 БС представляют собой усилители с коэффициентами усиления (2) KдвKw/Hг, где Kдв, Hг - коэффициент передачи корректирующего двигателя и кинетический момент ГС 3 соответственно; Kw масштабный коэффициент по угловой скорости вращения линии визирования. ВС 8 и 13 идентичны для обоих каналов 6 и 11 и отличаются только численными значениями коэффициентов.
Первый 9 и второй 14 МУ представляет собой усилители с коэффициентом 9 и второй 14 МУ представляет собой усилители с коэффициентом усиления N0.
Третий 58 МУ представляет собой усилитель с коэффициентом усиления, равным 2/ π.
Пример исполнения антенны 1 совместно с пеленгатором 2 приведен в (2).
ПЗУ 49 и 50 представляют собой блок памяти с предварительно записанным в нем цифровым кодом, соответствующим p/2 и значению максимального угла Φргс отворота антенны РГС от строительной оси ракеты соответственно.
ППЗУ 37, 38, 39, 40 представляют собой блоки памяти, осуществляющие хранение и перезапись информации.
ФП 19, 20, 31, 53 осуществляют операцию вычисления функции sin.
ФП 30 осуществляет операцию вычисления функции arcsin.
ФП 54 осуществляет операцию вычисления функции cos.
ФП 55 осуществляет операцию вычисления функции arcos.
Все цифровые блоки и устройства тактируются с помощью соответствующих синхроимпульсов с выхода синхронизатора (на схеме не показан).
Способ формирования сигнала управления ракетой при наведении на воздушную цель осуществляет следующим образом. При достижении ракетой после ее пуска дальности захвата цели РГС начинается этап ее самонаведения. При этом сигнал, отраженный от цели, через антенну 1 РГС (фиг.2) поступает на три входа пеленгатора 2 (разностные сигналы в горизонтальной и вертикальной плоскостях и суммарный сигнал). С его первого выхода сигнал, соответствующий угловому отклонению цели от равносигнального направления вертикальной плоскости, поступает в канал 6 формирования сигнала управления в вертикальной плоскости на вход первого УМ 7. После его усиления и преобразования в первом БС 8 в сигнал, в соответствующий величине Wв, он поступает через первый МУ 9 на первый вход первого множителя 10. На его второй вход поступает сигнал, соответствующий скорости V сближения ракеты с целью с выхода измерителя скорости сближения (на схеме не показан). В результате на выходе первого умножителя 10 формируется сигнал, соответствующий величине N0 V Wв, который через первый вход поступает на автопилот 4, где формируется сигнал управления ракеты в вертикальной плоскости согласно соотношению (1). Этот сигнал поступает на вертикальные рули 5 ракеты, которые управляют ракетой таким образом, чтобы Δв было бы равно нулю, т.е. в процессе самонаведения ракеты в вертикальной плоскости величина Wв также стремится к нулю.
Одновременно с второго выхода пеленгатора 2 сигнал, соответствующий угловому отклонению цели от равносигнального направления в горизонтальной плоскости, поступает в канал 11 формирования сигнала управления в горизонтальной плоскости на вход второго УМ 12. После его усиления и преобразования во втором БС 13 в сигнал, в соответствующий величине Wг, он поступает через первый вход вычислителя 16 требуемой угловой скорости вращения линии визирования на первый вход УС 27. На второй вход УС 27 с дальности захвата цели РГС до границы зоны распознавания класса цели поступает сигнал, соответствующий требуемой Wгт, изменяющейся в зависимости от разности требуемого и текущего ракурса радиолокационного наблюдения отраженных цели сигналов, угловой скорости вращения линии визирования в горизонтальной плоскости. Этот сигнал формируется в вычислителе 16 требуемой угловой скорости вращения линии визирования в соответствии с соотношениями (4) (6). Результат сравнения с выхода УС 27 через второй МУ 14 поступает на первый вход второго умножителя 15. На его второй вход, аналогично как и в канале 6, поступает сигнал, соответствующий скорости сближения ракеты с целью с выхода измерителя скорости сближения. В результате на его выходе формируется сигнал, соответствующий величине N0 V (Wгт Wг), который через второй вход поступает на автопилот 4, где формируется сигнал управления ракетой в горизонтальной плоскости согласно соотношению (3). Этот сигнал поступает на горизонтальные рули 5 ракеты, которые управляют таким образом, чтобы в процессе самонаведения ракеты на данном участке угловая скорость вращения линии визирования была бы равной требуемой Wгт.
Для сопровождения цели по направлению необходимо, чтобы ось визирования следила за целью. Для этого сигналы с выходов соответственно первого 7 и второго 12 УМ поступают соответственно через первый и второй входы ГС 3 на его корректирующие двигатели (азимута и угла места соответственно). Под действием моментов коррекции ГС 3 прецессирует относительно своих осей подвесе. Движение ГС 3 через механические связи передаются антенне 1. Процессия ГС 3 продолжается до тех пор, пока ось визирования антенны 1 не совпадет с направлением на цель.
При нахождении ракеты в зоне распознавания класса цели необходимо, чтобы на конечном участке самонаведения промах ракеты был равен нулю, т.е. угловая скорость вращения линии визирования тоже была бы равна нулю. В этом случае сигнал, соответствующий величине Wгт, на второй вход УС 27 поступать не должен, а следовательно, и в автопилоте 4 должен формироваться сигнал Δг, определяемый соотношением (2), т.е. в горизонтальной плоскости (как и в вертикальной) на этом участке самонаведения величина Wг должна стремиться к нулю.
Формирование сигнала, соответствующего величине Wгт, и подача его на второй вход УС 27 с дальности захвата цели РГС до границы зоны распознавания класса цели происходит в вычислителе 16 требуемой угловой скорости вращения линии визирования следующим образом.
Цифровой код требуемого угла отворота вектора скорости ракеты Φрт с первого выхода вычислителя 17 требуемого угла отклонения вектора скорости ракеты через первый ФП 19, который осуществляет операцию вычисления функции sin, поступает на второй вход третьего умножителя 21, где умножается на код значения собственной скорости ракеты Vр, поступающий через четвертый вход вычислителя 16 требуемой угловой скорости вращения линии визирования. С выхода умножителя 21 код произведения Vр sin Φрт поступает на первый вход первого ВУ 23. Одновременно код значения угла цели Φц со второго выхода вычислителя 18 параметров движения цели через второй ФП 20, осуществляющий операцию вычисления функции sin, поступает на второй вход четвертого умножителя 22, где умножается на код значения скорости цели Vц, поступающий с первого выхода вычислителя 18 параметров движения цели. С выхода умножителя 22 код произведения Vц sin Φц поступает на второй вход первого ВУ 23. Код результата разности произведений с выхода ВУ 23 поступает на второй вход первого блока деления 24, где делится на код текущей дальности D ракета-цель, поступающий с выхода дальномера (на схеме не показан) на первый вход блока деления со второго входа вычислителя 16. В результате на выходе блока деления 24 формируется код требуемой угловой скорости вращения линии визирования Wгт (формула 4), который через первый блок логических элементов И 25 поступает на ЦАП 26, где преобразуется в аналоговый вид, и далее на второй вход первого УС 27 для последующего формирования сигнала управления Δ′ (в это время на первом входе УС 27 присутствует сигнал Wг). При достижении ракетой границы зоны распознавания на втором выходе вычислителя 17 требуемого угла отклонения вектора скорости ракеты с формируется сигнал логического нуля, который является запрещающим сигналом для прохождения цифрового кода требуемой угловой скорости вращения линии визирования Wгт с выхода первого блока деления 24 на УС 27. Это необходимо для того, чтобы дальнейшее формирование сигнала управления Δ′ не привело к выходу ракеты из зоны распознавания. В результате в дальнейшем будет сформирован сигнал управления Δг (формула 2).
Код изменения требуемого угла Φрт отклонения вектора скорости ракеты формируется в вычислителе 17 требуемого угла отклонения вектора скорости ракеты следующим образом (фиг. 3). Предварительно, перед пуском ракеты в четвертый ППЗУ 40 вычислителя 17 требуемого угла отклонения вектора скорости ракеты из бортовой цифровой вычислительной машины носителя управляемых ракет вводятся в цифровой код значения заданного угла Φцз между вектором скорости цели и линией визирования, при котором в РГС возможно радиолокационное наблюдение сигналов вторичной модуляции. После захвата цели РГС в вычислителе 17 требуемого угла отклонения вектора скорости ракеты происходит текущий анализ местоположения УР (в зоне распознавания класса цели или за ее приделами). Для этого формируемый на выходе второго ВУ 43 сигнал разности значений текущего ракурса радиолокационного наблюдения цели Φц поступающего через второй вход вычислителя 17, и заданной величины угла Φцз, поступает на первый вход второго УС 47, где сравнивается с сигналом, соответствующим уровню логического нуля, поступающего на второй вход (второй вход УС 47 соединен с корпусом РГС, что соответствует наличию на его входе сигнала логического нуля). Если УР находится в зоне распознавания класса цели (что соответствует Φц ≅ Φцз), то на выходе УС 47 формируется уровень логического нуля, в противном случае формируется сигнал логической единицы, который, поступая на первые входы второго 32 и третьего 33, второй вход четвертого 34 блоков логических элементов И и второй выход вычислителя 17, является разрешающим для прохождения на первое 37, второе 38 и третье 39 ППЗУ и ЦАП 26 (фиг. 2) соответственно значения собственной скорости ракеты Vр с первого входа вычислителя 17 начального (на дальности захвата цели РГС) угла Φро между вектором скорости ракеты и линией визирования с выхода логического элемента ИЛИ 52, начального (на дальности захвата цели РГС) угла Φцо (код разности Φц - Φцз) между вектором скорости цели и линией визирования с выхода второго ВУ 43, требуемой угловой скорости вращения линии визирования Wгт с выхода блока деления 24 (фиг. 2).
Оптимальный угол (фиг. 1), на который необходимо отклонить вектор скорости ракеты от линии визирования, чтобы совершаемый ею маневр (полет до границы зоны распознавания) длился минимальное время, определяется следующим образом:
Φропт = (π/2)-(Φц-Φцз). (7),
Значение Φр опт формируется на выходе четвертого ВУ 45 путем вычитания из цифрового кода константы π /2, поступающего на его второй вход с выхода первого ПЗУ 49, кода, соответствующего разности углов vц и Φцз поступающего на первый вход с выхода второго ВУ 43.
Чтобы не произошло срыва сопровождения ВЦ из-за выхода ее из приделов диаграммы направленности антенной РГС (например, во время маневра цели), начальный угол Φро отворота вектора скорости ракеты не должен превышать значения максимального угла Φргс отклонения антенны от строительной оси ракеты. С этой целью в третьем УС 48 сравнивается цифровой код значения угла Φропт, поступающего на первый его вход с выхода четвертого ВУ 45, с кодом величины угла Φргс, поступающим на второй его вход с выхода второго ПЗУ 50. При этом если Φропт ≅ Φргс, то на выходе УС 48 будет сформирован сигнал логической единицы, который, поступая на второй вход пятого блока логических элементов И 35, является разрешающим сигналом для прохождения с выхода второго ВУ 45 через логический элемент ИЛИ 52 на второй вход третьего блока логических элементов И 33 цифрового кода величины Φропт. Если Φропт > Φргс то на выходе третьего УС 48 сформируется сигнал логического нуля, который будет запрещающим сигналом для прохождения цифрового кода Φропт через пятый блок логических элементов И 35 и через логический элемент НЕ 51 разрешающим для прохождения цифрового кода Φргс с выхода второго ПЗУ 50 через шестой блок логических элементов И 36 и логический элемент ИЛИ 52 на второй вход третьего блока логических элементов И 33. Таким образом, если Φропт ≅ Φргс, то в ППЗУ 38 в качестве начального угла между вектором скорости ракеты и линией визирования Φро будет записан цифровой код значения угла Φропт. Если Φропт > Φргс, то угол Φро будет иметь значение, равное углу Φргс.
Требуемый угол отклонения вектора скорости ракеты Φрт изменяется от его максимального начального значения Φро до конечного (на границе зоны распознавания класса цели, при входе в нее ракеты) угла Φрк который определяется следующим образом [4]
Формирование значения Φрк в вычислителе 17 требуемого угла происходит следующим образом. Код значения заданного угла Φцз поступает через четвертый ФП 31 (осуществляет операцию вычисления функции sin) на первый вход шестого умножителя 42, на второй вход которого поступает цифровой код значения скорости цели Vц через третий вход вычислителя 17. Код, соответствующий произведению Vц sin Φцз, поступает на первый вход второго блока деления 28, где делится на код значения собственной скорости ракеты Vр, поступающий на его второй вход с выхода первого ППЗУ 37. Результат деления поступает на третий ФП 30 (осуществляет операцию вычисления функции arosin), на выходе которого формируется код значения конечного угла Φрк
Код значения углового коэффициента K наклона изменения угла Φрт (формула 6) формируется в вычислителе 17 требуемого угла следующим образом. С выхода третьего ВУ 44 код разности значений углов Φро, поступающего с выхода ППЗУ 38, и Φрк, поступающего с выхода ФП 30, поступает на первый вход третьего блока деления 29, на второй вход которого поступает код значения угла Φцо с выхода ППЗУ 39. В результате, на выходе блока деления 29 формируется код значения коэффициента K.
Код изменяющегося требуемого угла Φрт отклонения вектора скорости ракеты формируется в вычислителе 17 требуемого угла отклонения вектора скорости ракеты следующим образом. На выходе пятого умножителя 41 формируется код произведения значений коэффициента K, поступающего с выхода третьего блока деления 29, и разности углов текущего Φц и заданного Φцз, поступающей с выхода второго ВУ 43. Цифровой код произведения K ((Φц-Φцз)) поступает далее на второй вход первого сумматора 46, где суммируется с кодом, соответствующим величине Φрк, с выхода третьего ФП 30. В результате, на выходе первого сумматора 46 формируется код величины угла Φрт, который поступает на первый выход вычислителя 17.
Код значения Vц и Φц формируется в вычислителе 18 параметров движения цели следующим образом (фиг. 4).
Известны [4] кинематические уравнения движения ракеты и цели
После преобразования уравнений и линейной аппроксимации тригонометрических функциях уравнений скорость цели Vц и текущий угол Φц между вектором скорости цели и линией визирования (ракурс радиолокационного наблюдения отраженных от цели сигналов) будут определяться следующим образом:
Код значения угла Φр отворота диаграммы направленности антенны РГС от строительной оси ракеты с выхода датчика ориентации диаграммы направленности антенны (на схеме не показан) через второй вход вычислителя 18 поступает на пятый 53 и шестой 54 ФП (осуществляют операцию вычисления функции sin и cos соответственно), откуда далее подаются на первые входы седьмого 56 и девятого 58 умножителей, где происходит их умножение на код значения собственной скорости ракеты Vр, поступающий на их вторые входы через первый вход вычислителя 18. На выходе пятого ВУ 60 формируется код соответствующий величине Vр ( (sinΦр-cosΦр) ) который поступает на первый вход второго сумматора 63, где производится его суммирование с кодом скорости V сближения ракеты с целью, поступающим на второй вход через четвертый вход вычислителя 18. Результат суммирования с выхода второго сумматора 63 поступает на первый вход седьмого ВУ 62, где из суммы осуществляется вычитание кода произведения Wг D, формируемого на выходе восьмого умножителя 57 путем перемножения сигналов угловой скорости Wг вращения линии визирования, поступающей через пятый вход вычислителя 18, и текущей дальности D до цели, поступающей через третий вход вычислителя 18. Цифровой код разности с выхода седьмого ВУ 62 поступает на третий МУ 59 с коэффициентом усиления 2/ π на выходе которого формируется код скорости цели Vц.
Для формирования кода значения vц в шестом ВУ 61 производится вычитание из значения скорости V сближения ракеты с целью, поступающего на его первый вход через четвертый вход вычислителя 18, значение произведения Vр cos Φр с выхода девятого умножителя 58. Разность с выхода шестого ВУ 61 поступает на второй вход четвертого блока деления 64, где производится ее деление на код скорости цели Vц, поступающего с выхода третьего МУ 59. Результат деления через седьмой ФП 55, в котором осуществляется операция вычисления функции arcos, поступает на второй выход вычислителя 18.
Таким образом, путем дополнительного введения в контур самонаведения ракеты с дальности захвата цели на автосопровождение РГС до пересечения ракетой границы зоны распознавания класса цели требуемой, изменяющейся в зависимости от разности текущего и требуемого ракурсов радиолокационного наблюдения отраженных от цели сигналов угловой скорости вращения линии визирования "ракета-цель" увеличивается информативность сигнала управления ракетой, позволяющая, во-первых, вывести ее в зону распознавания класса цели при нахождении ракеты вне этой зоны на этапе самонаведения, и, во-вторых, после пересечения границы зоны распознавания класса цели осуществить дальнейшее самонаведение ракеты в приделах этой зоны.
Источники информации
1. Патент США кл. F 42 B 15/02, N 4010467, 1972.
2. Максимов М.В. Горгонов Г.И. Радиоэлектронные системы самонаведения. - М. Радио и связь, 1982.
3. Небабин В. Г. Сергеев В.В. Методы и техника радиолокационного распознавания. М. Радио и связь, 1984.
4. Боевое применение и боевая эффективность авиационных комплексов войск ПВО страны / Под ред. В.Абрамова. М. Военное издательство, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ СБЛИЖЕНИЯ | 1995 |
|
RU2087007C1 |
| ЦИФРОВОЙ БЛОК ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1998 |
|
RU2123709C1 |
| Устройство для нахождения экстремума аддитивной функции многих переменных | 1990 |
|
SU1765830A1 |
| Табличный сумматор вычетов | 1987 |
|
SU1441396A1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на самолёт из состава их пары по его функциональному назначению по принципу "ведущий-ведомый" | 2019 |
|
RU2695762C1 |
| Способ всеракурсного самонаведения ракеты "воздух-воздух" на заданный тип самолёта из состава их разнотипной пары | 2023 |
|
RU2805782C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на заданный тип самолёта с турбореактивным двигателем из состава их разнотипной пары | 2021 |
|
RU2758682C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на заданный тип самолёта с турбореактивным двигателем из состава их разнотипной пары при воздействии уводящих по скорости помех | 2022 |
|
RU2783734C1 |
| Способ функционирования активной радиолокационной головки самонаведения управляемой ракеты "воздух - воздух" при её самонаведении на вертолет и постановке им уводящих по дальности и скорости помех | 2024 |
|
RU2835459C1 |
| УСТРОЙСТВО ДЛЯ РАСЧЕТА РАЗМЕРОВ ОБЛАСТИ ВЕРОЯТНОГО НАХОЖДЕНИЯ ЦЕЛИ | 2014 |
|
RU2554534C1 |

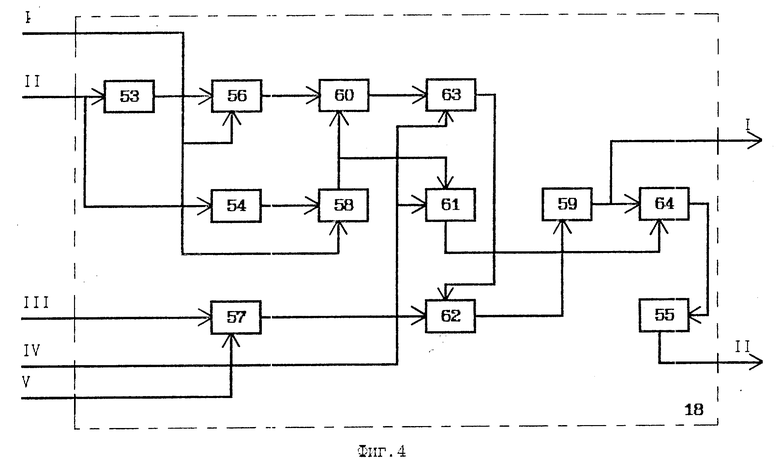
Изобретение относится к области радиоуправления и может быть использовано в радиоэлектронных системах самонаведения управляемых ракет класса "воздух-воздух" с целью повышения информативности сигнала управления ракетой при наведении ее на воздушную цель. С помощью антенны 1, пеленгатора 2, гидростабилизатора 3, автопилота 4, горизонтальных и вертикальных рулей 5, канала формирования сигнала управления в вертикальной плоскости 6, состоящего из усилителя мощности 7, блока согласования 8, масштабирующего усилителя 9, умножителя 10, канала формирования сигнала управления в горизонтальной плоскости 11, состоящего из усилителя мощности 12, блока согласования 13, масштабирующего усилителя 14, умножителя 15, вычислителя 16 требуемой угловой скорости вращения линии визирования Wгт формируют сигнал управления ракетой в вертикальной плоскости с дальности захвата цели РГС до встречи ракеты с целью и в горизонтальной плоскости с границы зоны распознания класса цели до встречи ракеты с целью, определяемый соответственно соотношениями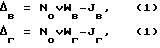 ,
,
а в горизонтальной плоскости с дальности захвата цели на автосопровождение РГС ракеты до границы зоны распознавания класса цели, определяемый соотношением  где N0 - навигационная постоянная; V - скорость сближения ракеты с целью; Wв, Wг - угловые скорости вращения линии визирования "ракета-цель" соответственно в вертикальной и горизонтальной плоскостях; Jв, Jг - линейные ускорения, развиваемые ракетой соответственно в вертикальной и горизонтальной плоскостях. 2 с. и 2 з.п. ф-лы, 4 ил.
где N0 - навигационная постоянная; V - скорость сближения ракеты с целью; Wв, Wг - угловые скорости вращения линии визирования "ракета-цель" соответственно в вертикальной и горизонтальной плоскостях; Jв, Jг - линейные ускорения, развиваемые ракетой соответственно в вертикальной и горизонтальной плоскостях. 2 с. и 2 з.п. ф-лы, 4 ил.
Δв = NoV•Wв-Jв,
Δг = NoV•Wг-Jг,
где N0 навигационная постоянная;
V скорость сближения ракеты с целью;
Wв, Wг угловые скорости вращения линии визирования ракета цель соответственно в вертикальной и горизонтальной плоскостях;
Jв, Jг линейные ускорения, развиваемые ракетой соответственно в вертикальной (нормальное) и горизонтальной (боковое) плоскостях,
отличающийся тем, что с дальности захвата цели на автосопровождение радиолокационной головкой самонаведения ракеты до границы зоны распознавания класса цели дополнительно формируют сигнал управления ракетой в горизонтальной плоскости, определяемый соотношением
где
Wгт = [VрsinΦрт-VцsinΦц]/D,
Φрт = K(Φц-Φцз)+Φрк,
Vц, Vр скорость цели и ракеты соответственно;
Φцо, Φцз, Φц - начальный (на дальности захвата цели радиолокационной головкой самонаведения ракеты), заданный и текущий угол (ракурс радиолокационного наблюдения отраженных от цели сигналов) между вектором скорости цели и линией визирования соответственно;
Φро, Φрк, Φрт - начальный (на дальности захвата цели радиолокационной головкой самонаведения ракеты), конечный (на границе зоны распознавания класса цели (при входе в нее ракеты) и требуемый угол между вектором скорости ракеты и линией визирования;
D текущее значение дальности между ракетой и целью.
| Максимов М.В., Горгонов Г.И | |||
| Радиолокационные системы самонаведения | |||
| - М.: Радио и связь, 1982, с | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Там же, с | |||
| ТЕЛЕФОННЫЙ АППАРАТ, ОТЗЫВАЮЩИЙСЯ ТОЛЬКО НА ВХОДЯЩИЕ ТОКИ | 1920 |
|
SU274A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
