Изобретение относится к сельскому хозяйству, в частности к манипуляторам доильных установок.
Известно устройство [1] , содержащее доильный аппарат и манипулятор, прикрепленный к доильному ведру. При применении данного устройства возникают неудобства, связанные с его перемещением.
Известен агрегат индивидуального доения коров АИД-1 [2], содержащий доильный аппарат и вакуумную аппаратуру. Агрегат выполнен на шасси одноосной тележки. Данный агрегат не обеспечивает щадящий режим доения и выполнение заключительных операций доения.
Наиболее близким к изобретению является манипулятор доильной установки [3] , включающий доильные стаканы с механизмом додаивания, манипулятор, блок управления, вакуум-провод и молокопровод. Однако данное устройство не обладает мобильностью, что делает нецелесообразным его использование в частных подворьях.
Задачей настоящего изобретения является оптимизация режима доения и создание мобильного автомата доения коров.
Для достижения этого предложен мобильный автомат доения коров, содержащий доильное ведро, вакуумную аппаратуру, доильные стаканы, вакуумные и молочные шланги и манипулятор. Он оборудован одноосной тележкой, причем манипулятор к одноосной тележке прикреплен посредством поворотного механизма, выполненного в виде неподвижной пластины с двумя отверстиями и стержня с ручкой, к которому прикреплена пластина с фиксатором и пластина, шарнирно соединенная с пневмоцилиндром. Тележка снабжена упором, выполненным в виде трубчатого корпуса с пазом, взаимодействующим со штифтом подвижного штока. В крышке доильного ведра установлены четыре датчика наличия молока, сообщаемые каждый со своим стаканом, причем датчики снабжены управляющими камерами с плунжерами, содержащими каналы, камерами постоянного вакуума и управляющего вакуума, при этом управляющая камера первого датчика сообщена с вакуумным насосом, а управляющие камеры последующих датчиков сообщены с управляющей камерой предыдущего датчика через короткие каналы их плунжеров при нижнем положении поплавка, причем короткий канал плунжера последнего датчика сообщен с пневмоусилителем, управляющим пневмоцилиндрами, длинные каналы плунжеров связаны с соответствующими механизмами додаивания. Каждый доильный стакан содержит механизм додаивания, выполненный в виде двух пневмоцилиндров, к штангам которых посредством сферических шарниров прикреплена упорная шайба, взаимодействующая с долей вымени, причем пневмоцилиндры жестко прикреплены к стаканам.
Предлагаемое изобретение будет понятно из следующего описания и приложенных чертежей.
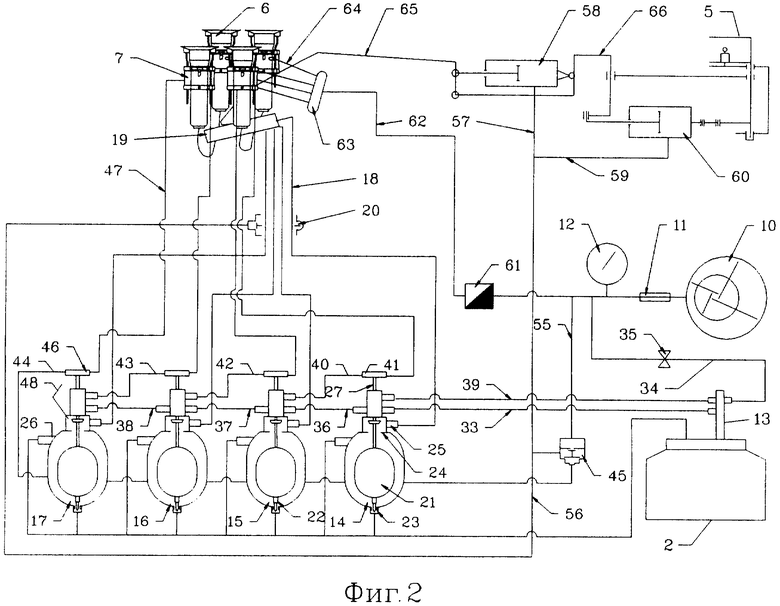
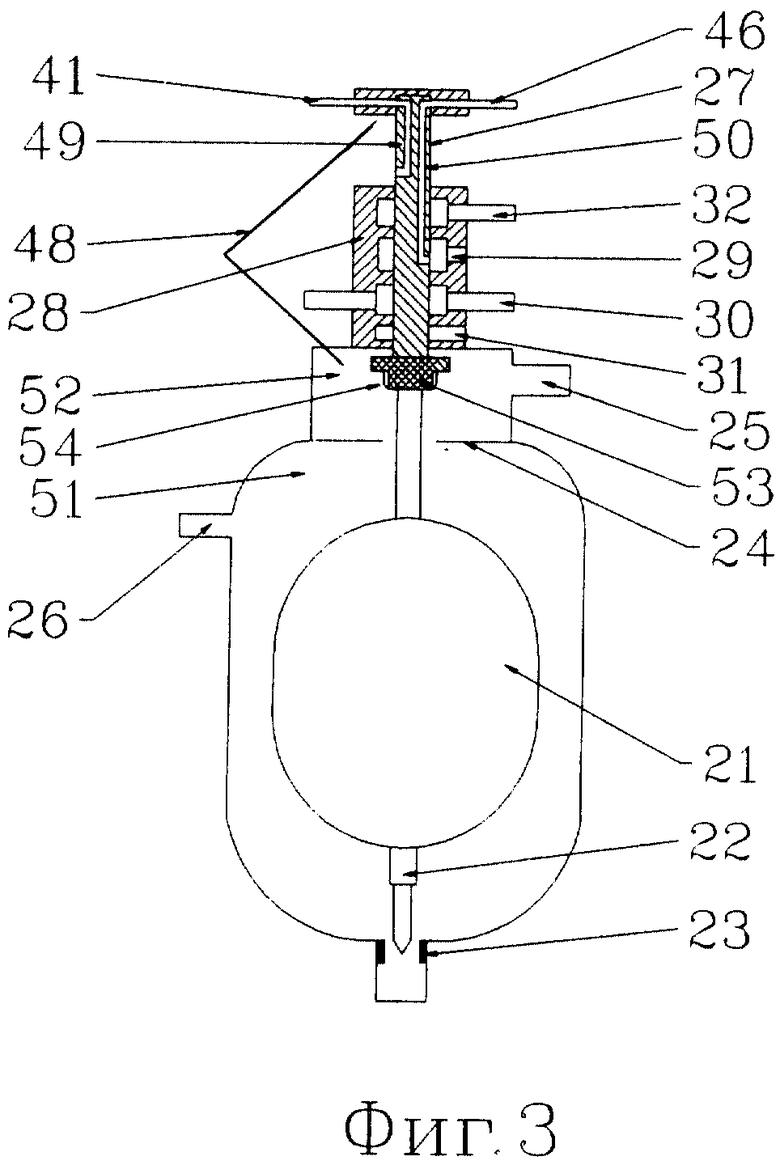
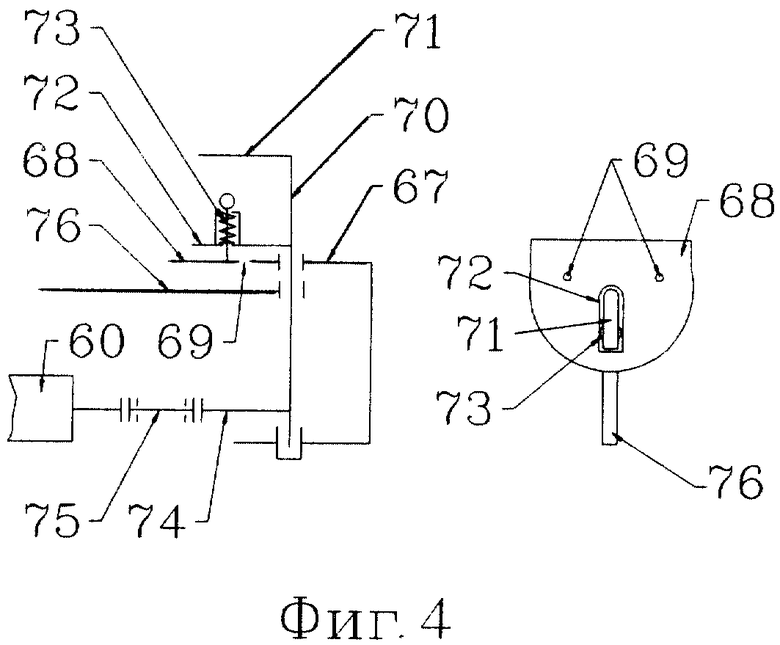
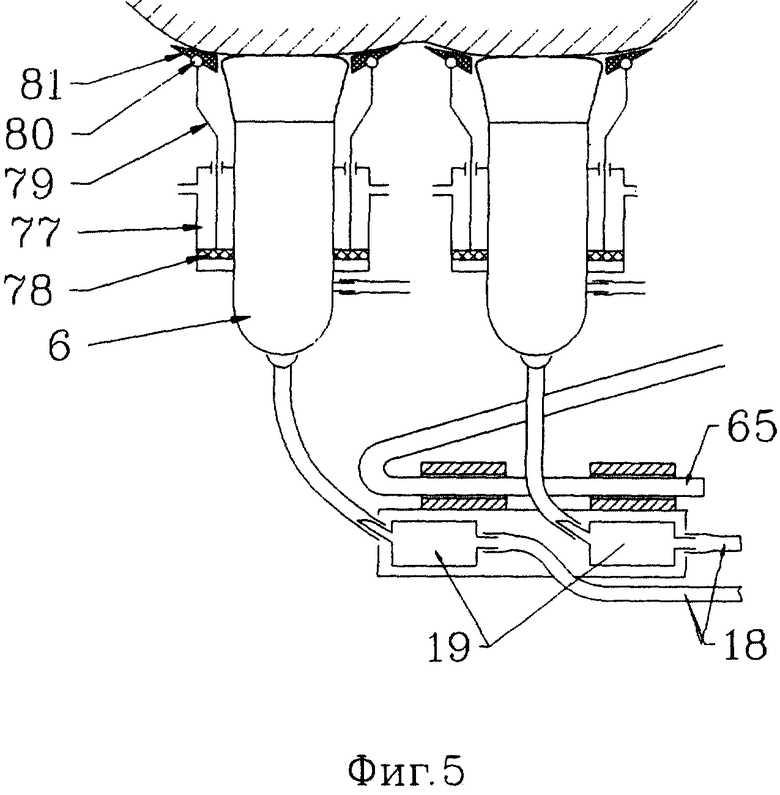
На фиг.1 приведен мобильный автомат доения коров, общий вид; на фиг.2 - схема доильного аппарата с манипулятором доения; на фиг.3 - датчик потока молока; на фиг.4 - поворотный механизм; на фиг.3 - механизм додаивания; на фиг.6 - упор.
Мобильный автомат доения коров (фиг.1) состоит из вакуумной аппаратуры 1, доильного ведра 2, блока управления 3, манипулятора 4 с поворотным механизмом 5, доильных стаканов 6 с механизмом додаивания 7, одноосной тележки 8 с упором 9.
Вакуумная аппаратура 1 включает вакуумный насос 10, вакуумный регулятор 11 и вакуумметр 12.
Доильное ведро 2 установлено на одноосной тележке 8 и имеет крышку с вмонтированным блоком управления 3 и распределителем постоянного вакуума 13.
Блок управления 3 выполнен в виде четырех датчиков наличия молока 14, 15, 16, 17 (фиг.2), каждый из которых соединен молочным шлангом 18 со своим коллектором 19 и далее доильным стаканом 6. Молочные шланги 18 снабжены пневмозажимом 20.
В корпусе датчиков 14-17 наличия молока установлены поплавки 21 с иглами 22, которые выполнены с переменным по длине сечением. Корпус каждого датчика наличия молока 14-17 имеет калиброванное отверстие 23, перегородку 24, молокоподводящий 25 и молоковыводящий 26 патрубки. Каждый поплавок 21 соединен с плунжером 27. Корпус плунжера 28 (фиг.2, фиг.3) имеет четыре камеры: камеру 29 атмосферного давления, камеру 30 постоянного вакуума, камеру 31 атмосферного давления, камеру 32 управляющего вакуума.
Камера 30 постоянного вакуума первого датчика 14 соединена вакуум-шлангом 33 через распределитель постоянного вакуума 13 с вакуум-шлангом 34. Последний соединен с вакуумным насосом 10 и снабжен механическим зажимом 35. Камера 30 постоянного вакуума первого датчика 14 соединена вакуум-шлангом 36 с камерой 30 постоянного вакуума последующего датчика 15, которая соединена вакуум-шлангом 37 с камерой 30 постоянного вакуума следующего датчика 16 и далее посредством вакуум-шланга 38 с камерой 30 постоянного вакуума последнего датчика 17.
Камера 32 управляющего вакуума первого датчика 14 соединена вакуум-шлангом 39 с распределителем постоянного вакуума 13. Камера 32 управляющего вакуума последующего датчика 15 соединена вакуум-шлангом 40 с патрубком 41 первого датчика 14. Камера 32 управляющего вакуума третьего датчика 16 соединена вакуум-шлангом 42 с патрубком 41 второго датчика 15. Камера 32 управляющего вакуума последнего датчика 17 соединена вакуум-шлангом 43 с патрубком 41 третьего датчика 16. Патрубок 41 последнего датчика 17 соединен вакуум-шлангом 44 с пневмоусилителем 45. Патрубок 46 каждого датчика наличия молока 14-17 соединен вакуум-шлангом 47 с механизмом 7 додаивания каждого доильного стакана 6.
В верхней части корпуса датчиков наличия молока 14-17 установлена стартовая скоба 48. Плунжер 27 снабжен коротким каналом 49 и длинным каналом 50. Короткий канал 49 соединен с патрубком 41, а длинный канал - с патрубком 46.
Перегородка 24 делит корпус каждого датчика 14-17 наличия молока на камеры 51 и 52. Последняя снабжена клапаном 53 с каналом 54.
Пневмоусилитель 54 (фиг. 2) соединен вакуум-шлангом 55 с вакуумным насосом 10, вакуум-шлангом 56 - с пневмозажимом 20, вакуум-шлангом 57 - с пневмоцилиндром 58, вакуум-шлангом 59 - с пневмоцилиндром 60 вывода манипулятора.
Пульсатор 61 соединен с вакуумным насосом 10 и вакуум-шлангом 62 с распределителем 63 переменного вакуума, а затем посредством вакуум-шлангов 64 с межстенными камерами доильных стаканов 6.
Манипулятор мобильного автомата доения коров включает в себя пневмоцилиндр 58 с рычагом 65, поворотный рычаг 66, пневмоцилиндр 60 вывода манипулятора, поворотный механизм 5 для перевода манипулятора в правое и левое рабочие положения. Последний состоит из корпуса 67 (фиг.4), включающего в себя пластину 68 с двумя отверстиями 69 для фиксации. В корпусе 67 расположен стержень 70 с ручкой 71, выполненный с возможностью вращения в одной плоскости. На стержне 70 жестко закреплены пластина 72 с пружинным фиксатором 73, пластина 74, шарнирно соединенная с пластиной 75. Последняя шарнирно соединена с пневмоцилиндром 60 вывода манипулятора. Рычаг манипулятора 76 шарнирно соединен с поворотным рычагом 66 и со стержнем 70.
Доильные стаканы 6 (фиг.5) снабжены механизмом додаивания 7. Последний включает два пневмоцилиндра 77, жестко закрепленных на доильном стакане 6. Поршень 78 каждого пневмоцилиндра посредством двух штанг 79 и сферических шарниров 80 связан с упорной шайбой 81. Каждый доильный стакан 6 имеет коллектор 19, который снабжен калиброванным отверстием. Каждый коллектор 19 прикреплен к скобе, которая соединена с рычагом 65.
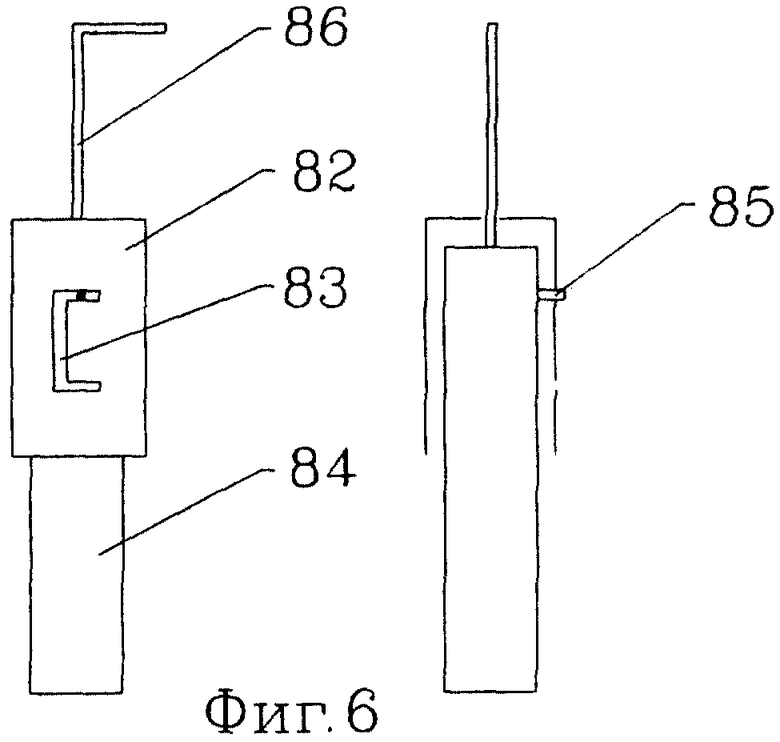
Упор 9 (фиг.1) состоит из трубчатого корпуса 82 (фиг.6) с пазом 83, позволяющим фиксировать положение подвижного штока 84 посредством штифта 85. Для изменения положения подвижный шток 84 снабжен ручкой 86.
Мобильный автомат доения коров работает следующим образом.
Оператор подвозит одноосную тележку 8 (фиг.1) между двух коров. Переводит упор 9 в рабочее положение, для чего посредством ручки 86 (фиг.6) поворачивает подвижный шток 84. При этом штифт 85 выходит из верхнего фиксированного положения в пазу 83, расположенном в трубчатом корпусе 82, и перемещается в нижнее положение. Затем оператор посредством ручки 86 поворачивает подвижный шток 84, при этом штифт 85 занимает нижнее фиксированное положение.
Затем оператор переводит поворотный механизм 5 (фиг.4) в правое или левое рабочее положение, в зависимости от очередности доения коров. Для этого посредством ручки 71 оператор поворачивает стержень 70 в корпусе 67, и пружинный фиксатор 73, расположенный на пластине 72, входит в отверстие 69, расположенное на пластине 68. При этом происходит поворот рычага манипулятора 76 и пластины 74. Пластина 75, шарнирно соединенная с пластиной 74, поворачивается при этом в противоположную сторону, увлекая за собой пневмоцилиндр 60 вывода манипулятора.
После этого оператор включает вакуумную аппаратуру 1 (фиг.1) и по показаниям вакуумметра 12 посредством вакуумного регулятора 11 устанавливает рабочий вакуум. После подготовки вымени к доению оператор устанавливает датчики 14-17 (фиг.2) наличия молока в стартовое положение поднятием плунжеров 27 и фиксацией их стартовыми скобами 48. Затем открывает механический зажим 35 и подводит доильные стаканы 6 под вымя животного. Удерживая одной рукой коллекторы 19, приподнимает доильные стаканы 6, а другой рукой надевает их на вымя животного. Вакуум от вакуумного насоса 10 по вакуум-шлангу 34 через распределитель 13 постоянного вакуума поступает в доильное ведро 2 и через датчики 14-17 наличия молока по шлангам 18 через коллекторы 19 поступает в подсосковые камеры доильных стаканов 6. Вакуум от вакуумного насоса 10 через пульсатор 61 по вакуум-шлангу 62 поступает в распределитель переменного вакуума 63 и далее по вакуум-шлангам 64 в межстенные камеры доильных стаканов 6. При стартовом положении датчиков 14-17 наличия молока их плунжеры 36 находятся в верхнем положении. Механизм 7 додаивания каждого доильного стакана 6 соединен с атмосферой по вакуум-шлангу 47, патрубку 46 (фиг.3), длинному каналу 50 плунжера 27 с атмосферной камерой 29.
Также соединяются с атмосферой (фиг.2) пневмоцилиндр 58, пневмоцилиндр 60 вывода манипулятора и пневматический зажим 20. Воздух (фиг.3) по короткому каналу 49 плунжера 27 через патрубок 41 последнего датчика 17 наличия молока (фиг.2) по вакуум-шлангу 44 поступает к пневмоусилителю 45, а далее по вакуум-шлангу 56 к пневматическому зажиму 20 и по вакуум-шлангам 57 и 59 в пневмоцилиндр 58 и пневмоцилиндр 60 вывода манипулятора.
Молоко, поступающее в начале доения, выводится в доильное ведро 2 через калиброванное отверстие 23. С увеличением интенсивности молокоотдачи молоко не успевает проходить через калиброванное отверстие 23 датчиков 14-17 наличия молока, и их камеры 51 заполняются молоком, что обеспечивает некоторый подъем поплавков 21. При этом стартовая скоба 48 освобождается от упора в головку плунжера 27 и под действием силы тяжести занимает нижнее положение, и датчик наличия молока начинает контролировать режим работы.
Большая часть молока через выходной патрубок 26 поступает в доильное ведро 2, а небольшая часть молока вытекает через калиброванное отверстие 23, в котором находится нижняя часть иглы 22. Вертикальные колебания поплавка 21 вместе с иглой 22 обеспечивают очистку калиброванного отверстия 23 от засорения. В каждой четверти вымени процесс молокоотдачи проходит по-разному (по времени и количеству молока), также работают датчики 14-17 наличия молока соответствующих четвертей вымени. При снижении интенсивности молокоотдачи выход молока через патрубок 26 прекращается и оно вытесняется только через калиброванное отверстие 23. Снижение интенсивности молокоотдачи вызывает опускание поплавка 21 с иглой 22 в калиброванное отверстие 23. При снижении интенсивности молоковыделения доли вымени (до 120 г/мин) отверстие длинного канала 50 (фиг.2, фиг.3) плунжера 27 соединится с камерой 30 постоянного вакуума, и вакуум из доильного ведра 2 через распределитель постоянного вакуума 13, по вакуум-шлангу 38, через камеру 30 постоянного вакуума датчика 14 наличия молока, по длинному каналу 50, через патрубок 46, по вакуум-шлангу 47 поступает в механизм 7 додаивания доильного стакана 6.
Посредством разрежения, устанавливающегося в пневмоцилиндрах 77 (фиг.5) каждого доильного стакана 6, поршни 78 с помощью штанг 79 и сферических шарниров 80 воздействуют на упорную шайбу 81, соприкасающуюся с околососковым пространством четверти вымени. Вследствие этого доильный стакан 6 перемещается вниз относительно упорной шайбы 81, т.е. происходит процесс додаивания.
Каждая камера 30 (фиг.2, 3) постоянного вакуума датчиков 14-17 наличия молока постоянно соединена с распределителем постоянного вакуума 13. Вакуум из распределителя постоянного вакуума 13 по вакуум-шлангу 33 через камеру 30 постоянного вакуума первого датчика 14 наличия молока по вакуум-шлангу 36 поступает в камеру 30 постоянного вакуума последующего датчика 15 наличия молока, затем по вакуум-шлангу 37 в камеру 30 постоянного вакуума датчика 16 наличия молока и по вакуум-шлангу 38 в камеру 30 постоянного вакуума последнего датчика 17 наличия молока. Так что независимо от положения плунжера 27 остальных датчиков в камере постоянного вакуума 30 каждого датчика будет вакуум.
Если после включения в работу механизма 7 додаивания интенсивность молоковыделения возрастает, поплавок 21 поднимается вверх, отверстие длинного канала 50 (фиг.3) выходит из камеры 30 постоянного вакуума и датчик наличия молока снимает разрежение с механизма 7 додаивания.
Утолщенный участок иглы 22 выходит из калиброванного отверстия 23, увеличивая его пропускную способность. При дальнейшем снижении интенсивности молоковыделения (до 120 г/мин) вновь поступает разрежение в механизм 7 додаивания.
С дальнейшим уменьшением молокоотдачи происходит дальнейшее опускание поплавка 21 с плунжером 27. При уменьшении интенсивности молоковыделения (до 50 г/мин, что обеспечивается выходным переменным сечением калиброванного отверстия 23), поплавок 21 занимает нижнее положение (фиг.3), клапан 53 перекрывает отверстие в перегородке 24 и обеспечивает соединение камеры 51 с камерой 52 датчика наличия молока только посредством каналов 54 клапана 53. Вакуум, поступив в камеру 52 по каналам 54 клапана 53, по шлангу 18 (фиг.2) поступает в коллектор 19, где за счет поступления через калиброванное отверстие потока воздуха устанавливается заданный вакуум (до 250 мл рт. ст.), что способствует удержанию доильного стакана 6 на четверти вымени.
Одновременно отверстие длинного канала 50 (фиг.3) соединяется с атмосферной камерой 31, и воздух по длинному каналу 50 через патрубок 46 по вакуум-шлангу 47 поступит в механизм 7 додаивания доильного стакана 6. При нижнем положении поплавка 21 отверстие короткого канала 49 плунжера 27 соединится с управляющей камерой 32.
Вакуум из распределителя постоянного вакуума 13 (фиг.2) по вакуум-шлангу 39 поступает в камеру 32 управляющего вакуума первого датчика 14 наличия молока. Камеры 32 управляющего вакуума датчиков 14-17 наличия молока соединены так, что вакуум поступит из патрубка 41 последнего датчика 17 наличия молока только при окончании доения всех долей вымени, т.е. плунжеры 27 датчиков 14-17 наличия молока займут нижнее положение, независимо от очередности их опускания.
Вакуум из камеры 32 управляющего вакуума (фиг.2, 3) первого датчика 14 наличия молока по короткому каналу 49 плунжера 27 поступает к патрубку 41, а от него по вакуум-шлангу 40 в управляющую камеру 32 последующего датчика 15 наличия молока, затем из нее по короткому каналу 32 плунжера 27 по вакуум-шлангу 42 поступит в управляющую камеру 32 датчика 16 наличия молока, из нее по короткому каналу 49 плунжера 27 по вакуум-шлангу 43 в управляющую камеру 32 последнего датчика 17 наличия молока и по короткому каналу 49 плунжера 27 к патрубку 41.
Как только в последней доле вымени интенсивность молокоотдачи снизится до 50 г/мин, вакуум из патрубка 41 (фиг.2) датчика 17 наличия молока поступит по вакуум-шлангу 44 к пневмоусилителю 45, который срабатывает, и вакуум от вакуумного насоса по вакуум-шлангу 55 через пневмоусилитель 45 одновременно поступает
- по вакуум-шлангу 56 к пневмозажиму 20, который срабатывает и перекрывает молочные шланги 18, в результате чего давление в подсосковых камерах доильных стаканов 6 приближается к атмосферному и доильные стаканы 6 упадут с сосков;
- по вакуум-шлангу 57 в пневмоцилиндр 58, вследствие чего пневмоцилиндр 58 приподнимает рычаг 65 с доильными стаканами 6, тем самым исключая повреждение доильных стаканов 6;
- по пневмошлангу 59 в пневмоцилиндр 60 вывода манипулятора, который выводит манипулятор из под коровы.
Оператор закрывает механический зажим 35, устанавливает поплавки 21 в стартовое положение. Мобильный автомат доения коров готов для выдаивания следующего животного.
Применение мобильного автомата доения коров позволит снизить уровень заболеваемости вымени коров маститом, повысить полноту выдаивания и производительность труда.
Экономический эффект может быть получен за счет повышения производительности труда и продуктивности животных.
Источники информации
1. Авт. св. СССР 1291086, кл. A 01 J 7/00, 1987.
2. Агрегат индивидуального доения АИД-1-01/Паспорт АИД. 0.000-01 ПС. Резенский завод доильных установок.
3. Авт. св. СССР 1750511, кл. A 01 J 7/00, 1992.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ЛИНЕЙНОЙ ДОИЛЬНОЙ УСТАНОВКИ | 1999 |
|
RU2151499C1 |
| ДОИЛЬНЫЙ АГРЕГАТ С УСТРОЙСТВОМ ДЛЯ ВЫПОЙКИ ТЕЛЯТ | 1998 |
|
RU2132126C1 |
| Доильный агрегат | 2019 |
|
RU2707518C1 |
| ПЕРЕНОСНОЙ МАНИПУЛЯТОР ДЛЯ ДОЕНИЯ КОРОВ | 2001 |
|
RU2221417C2 |
| АВТОМАТИЗИРОВАННАЯ ДОИЛЬНАЯ УСТАНОВКА | 2003 |
|
RU2244417C2 |
| ДОИЛЬНЫЙ АППАРАТ | 2000 |
|
RU2173044C1 |
| ДОИЛЬНЫЙ АППАРАТ | 1996 |
|
RU2109443C1 |
| Доильный агрегат | 2017 |
|
RU2654245C1 |
| ДОИЛЬНЫЙ АППАРАТ | 1996 |
|
RU2098949C1 |
| ДОИЛЬНЫЙ АППАРАТ | 2003 |
|
RU2259710C2 |
Мобильный автомат доения коров состоит из вакуумной аппаратуры доильного ведра, блока управления, манипулятора с поворотным механизмом доильных стаканов с механизмом додаивания, одноосной тележки с упором. Доильное ведро установлено на одноосной тележке и имеет крышку с вмонтированным блоком управления и распределителем постоянного вакуума. Блок управления выполнен в виде четырех датчиков наличия молока, каждый из которых соединен молочным шлангом со своим коллектором и далее доильным стаканом. Молочные шланги снабжены пневмозажимом. Манипулятор мобильного автомата доения коров включает в себя пневмоцилиндр с рычагом, поворотный рычаг, пневмоцилиндр вывода манипулятора, поворотный механизм для перевода манипулятора в правое и левое рабочие положения. Применение мобильного автомата доения коров позволит снизить уровень заболеваемости вымени коров маститом, повысить полноту выдаивания и производительность труда. 3 з.п.ф-лы, 6 ил.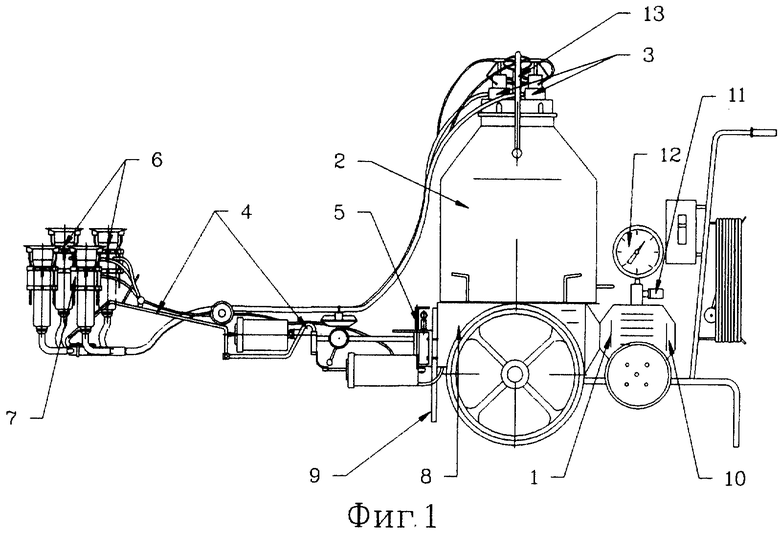
| МАНИПУЛЯТОР ДОЕНИЯ | 0 |
|
SU392916A1 |
| Манипулятор доильной установки | 1990 |
|
SU1750511A1 |
| Манипулятор к доильному аппарату | 1985 |
|
SU1291086A1 |
| Доильное ведро | 1983 |
|
SU1159521A1 |
| Агрегат для дойки коров | 1976 |
|
SU662045A1 |
