Изобретение относится к области машиностроения и предназначено для комбинированного дистанционного или местного управления запорными органами трубопроводной арматуры с поворотной пробкой, имеющей поверхность тела вращения, для перекрытия магистральных трубопроводов большого диаметра преимущественно в нефтегазодобывающей промышленности.
Известен привод запорно-регулирующей арматуры (патент РФ 2108513, МПК6 F 16 K 31/05, 10.04.98 г.), содержащий электродвигатель и редуктор, выполненный из трех модулей. Первый модуль редуктора выполнен в виде двухступенчатой рядовой зубчатой передачи, второй модуль редуктора выполнен в виде червячной передачи, а третий модуль содержит устройство ручного перемещения, выполненное в виде дополнительной планетарной ступени, содержащей водило, сателлиты, внутреннее и наружное колеса. При этом водило жестко связано с выходным валом, внутреннее колесо - с червячным колесом второго модуля, а наружное колесо снабжено червячным зубчатым венцом, кинематически связанным с червяком, на котором жестко закреплен маховик.
К недостаткам данного привода следует отнести его малый кпд за счет использования червячных передач, а также невозможность использования его для запорных органов с поворотной пробкой, имеющей поверхность тела вращения.
Известен электропривод запорной арматуры (патент РФ 2170871, МПК6 F 16 K 31/05, 20.07.2001 г.), содержащий электродвигатель, редуктор, выполненный на базе основного планетарного механизма с водилом, замыкающего планетарного механизма, червячной передачи ручного управления, муфту свободного хода и фрикционную муфту с механизмом управления.
К недостаткам данного устройства следует отнести, прежде всего, сложность конструктивного исполнения привода - использование двух дифференциальных и одного рядового зубчатого двухпоточного механизма, а также сложность его компоновки. Кроме того, данный привод предназначен для управления запорной арматуры небольшого диаметра, т.к. коэффициент редуцирования данного привода лежит в пределах 5-6, что требует использования электродвигателя большой мощности. К тому же данный полноповоротный электропривод невозможно использовать для запорных органов с поворотной пробкой, имеющей поверхность тела вращения.
В качестве прототипа выбран планетарный зубчатый редуктор по авторскому свидетельству СССР 1384859, МПК4 F 16 H 1/48, 30.03.88 г. Данный привод выбран в качестве прототипа по наибольшему числу существенных признаков, совпадающих с заявляемым приводом поворотного органа трубопроводной арматуры. Он содержит корпус, в котором размещен плюсовой планетарный редуктор с ведущим и ведомым валами. Два центральных колеса с внутренними зубьями, первое из которых связано с ведомым валом, а второе - с корпусом. На водиле планетарной передачи установлен двухвенцовый сателлит.
Данный привод не обеспечивает маломощное управление: маломощный электродвигатель и ручное управление, с созданием больших моментов на его выходе из-за низкого коэффициента передачи. Это обстоятельство не позволяет использовать его в нефтяных и газовых трубопроводах большого диаметра d≥1 м (до 2-х метров) с давлением до 200 атм, где потребные поворотные моменты достигают от 50 кН•м до 200 кН•м. В противном случае привод должен иметь большие габариты и мощный электродвигатель, а о ручном управлении не может быть и речи. К тому же данный полноповоротный электропривод невозможно использовать для запорных органов с поворотной пробкой, имеющей поверхность тела вращения.
Настоящее изобретение позволяет решить задачу обеспечения в маломощном приводе большого момента на выходе за счет повышения его кпд привода и выбора кинематических характеристик, обеспечивающих при этом большой (до 800) коэффициент редуцирования. Кроме того, настоящее изобретение позволяет обеспечить управление поворотным запорным органом, например шаровым краном, с возможностью регулирования угла поворота выходного вала.
Поставленная задача решается тем, что привод поворотного запорного органа трубопроводной арматуры, содержащий базовый модуль, размещенный в корпусе с присоединительным фланцем, выполненный на базе плюсового планетарного редуктора, содержащего установленный на подшипниках в корпусе эксцентриковый входной вал-водило, установленный на нем посредством подшипников двухвенцовый блок сателлита с общей ступицей, закрепленное в корпусе неподвижное входное центральное зубчатое колесо с внутренними зубьями и подвижное выходное центральное зубчатое колесо с внутренними зубьями, установленное на подшипниках в корпусе и соединенное с выходным валом, снабжен двумя съемными комплектами приставок, каждая из которых размещена в своем корпусе с присоединительным фланцем, аналогичным присоединительному фланцу корпуса базового модуля. Причем первая приставка для электромеханического исполнения привода содержит рядовую двухпоточную зубчатую передачу с паразитными колесами, вал входного центрального зубчатого колеса которой соединен с двигателем, а выходное зубчатое колесо с внутренними зубьями закреплено на эксцентриковом входном валу-водиле базового модуля. Вторая приставка для ручного исполнения привода содержит двухступенчатую передачу, выходная ступень которой аналогична передаче первой приставки, а входная ступень выполнена конической. Коническая ступень содержит входное коническое зубчатое колесо, которое установлено на валу маховика, и выходное коническое зубчатое колесо, установленное на валу входного центрального зубчатого колеса выходной ступени. При этом выходной вал, соединенный с подвижным выходным центральным зубчатым колесом с внутренними зубьями базового модуля, выполнен неполноповоротным с углом поворота на 90±10o и снабжен ограничителем поворота.
Для повышения кпд привода все подвижные элементы базового модуля установлены в корпусе или на эксцентриковом валу-водиле на подшипниках качения с короткими роликами.
С целью обеспечения возможности регулирования угла поворота неполноповоротного выходного вала его ограничитель поворота выполнен в виде двух регулируемых упоров, диаметрально закрепленных в корпусе базового модуля. Каждый из упоров выполнен в виде вала, размещенного с возможностью поворота и фиксации его в отверстиях корпуса базового модуля и имеющего фланец, в котором выполнены с равным угловым шагом две пары равных секторных пазов под крепежные элементы. На торцах валов эксцентрично их осям вращения закреплены оси, на которых установлены упорные ролики, размещенные в ответных секторных пазах, выполненных в неполноповоротном выходном валу и имеющих длину по дуге, равную 105±15o. При этом расстояние по дуге между секторными пазами с одной из сторон в сумме с величиной диаметра упорного ролика по дуге равно 90o.
Для обеспечения большого коэффициента редуцирования (в 65-70 раз) при минимальных габаритах и высоком кпд в базовом модуле его основные параметры имеют следующие характеристики:
- разницу между числами зубьев неподвижного входного центрального зубчатого колеса с внутренними зубьями и подвижного выходного центрального зубчатого колеса с внутренними зубьями выбирают из диапазона, равного 8...10, при числе зубьев выходного центрального колеса с внутренними зубьями, выбираемого из диапазона 40...50;
- разница между числами зубьев неподвижного входного центрального зубчатого колеса с внутренними зубьями и находящегося с ним в зацеплении венца сателлита равна разнице между числами зубьев подвижного выходного центрального зубчатого колеса с внутренними зубьями и находящегося с ним в зацеплении венца сателлита и выбирается из диапазона 3...4. Эти параметры обеспечивают в зацеплениях зубьев гарантированные угол зацепления, лежащий в пределах 30. ..33o, и коэффициента перекрытия ξ≥1,3.
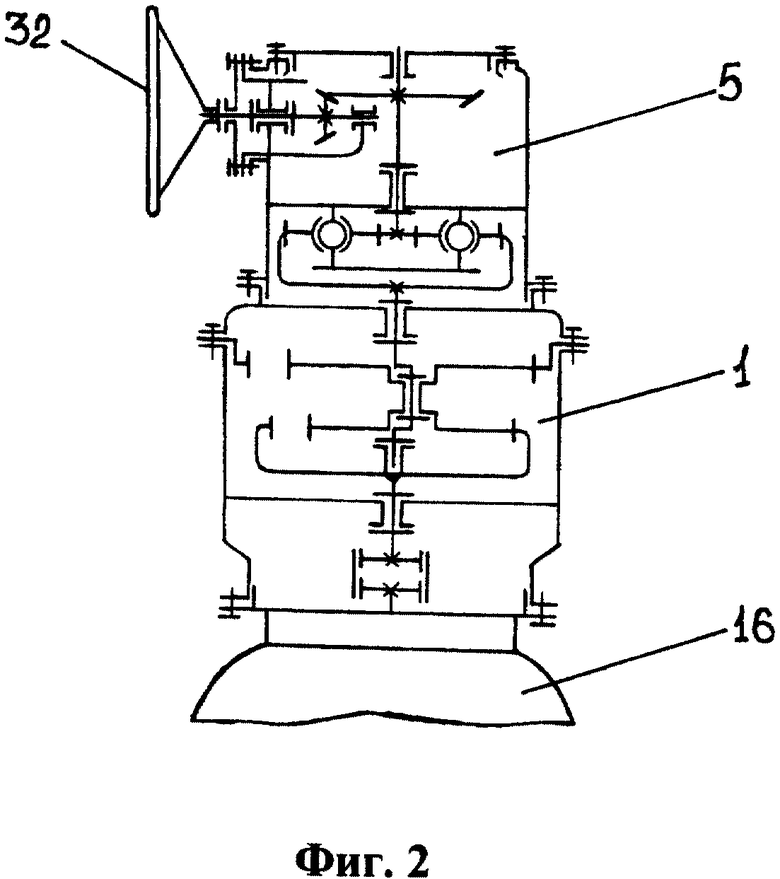
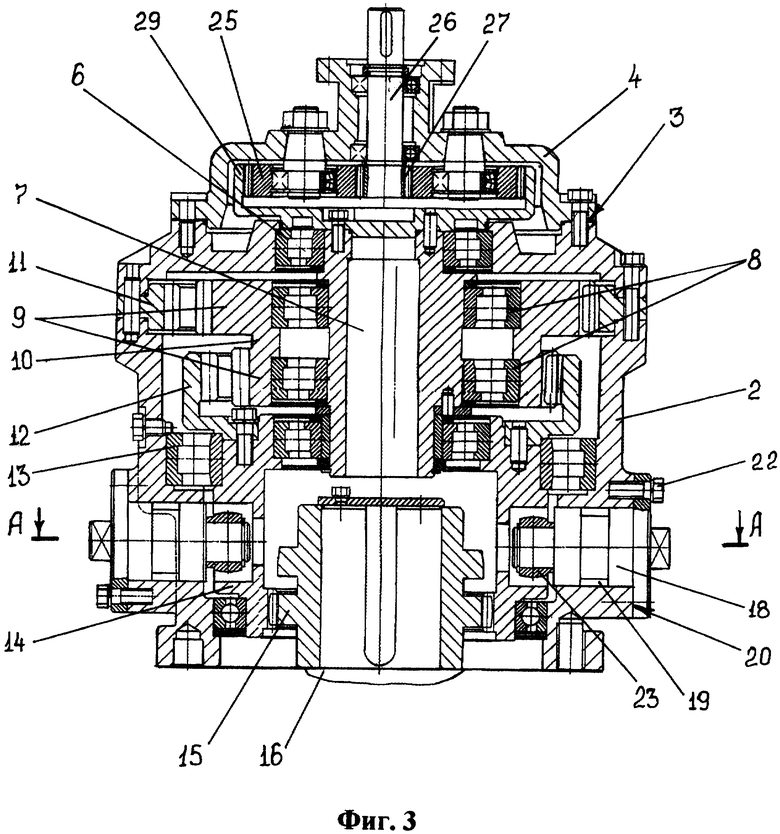
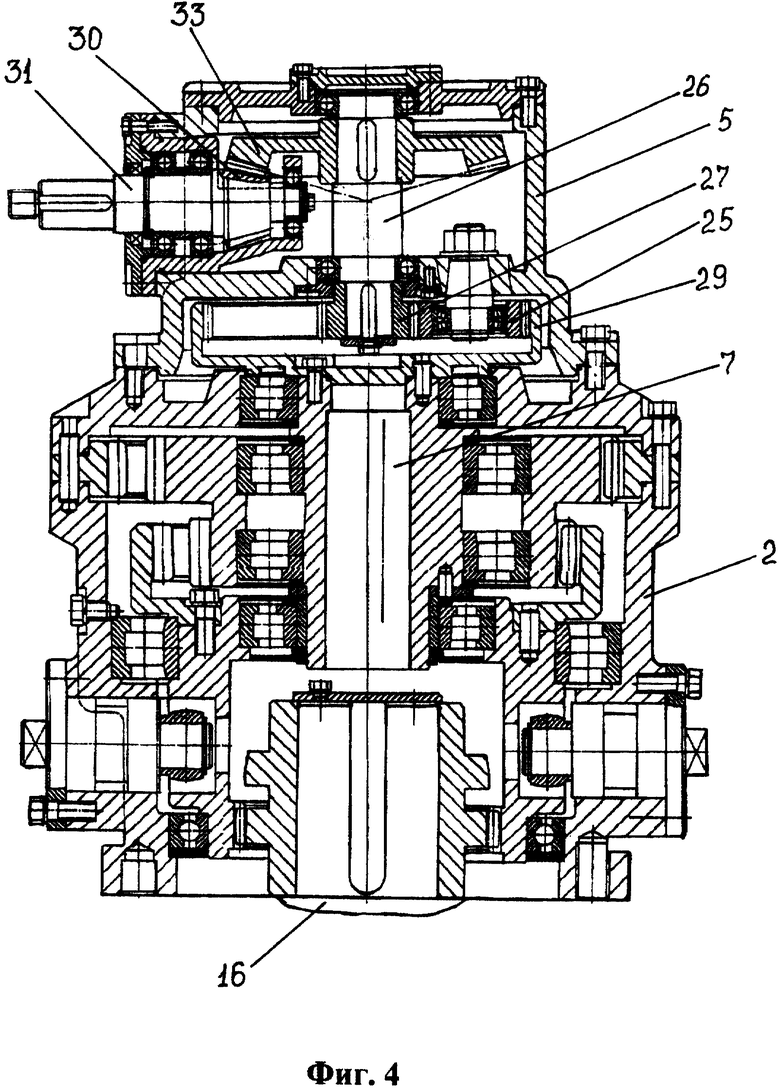
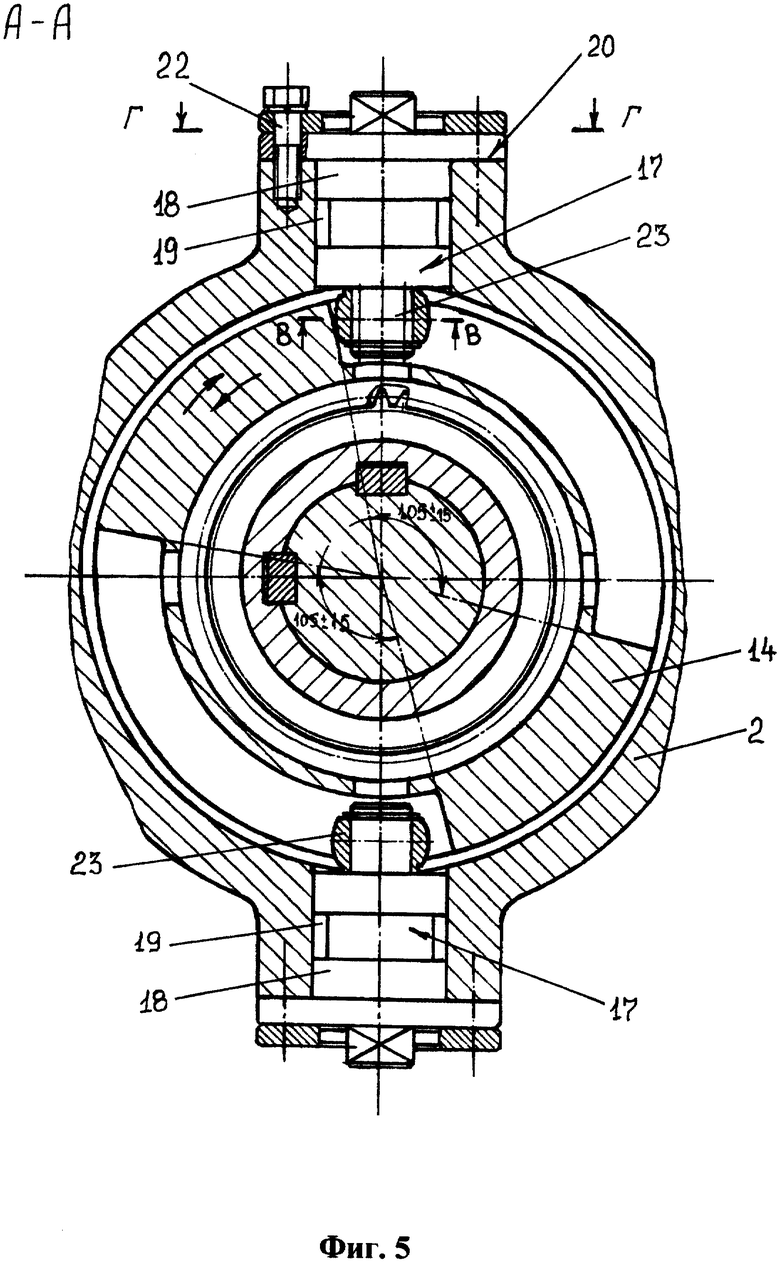
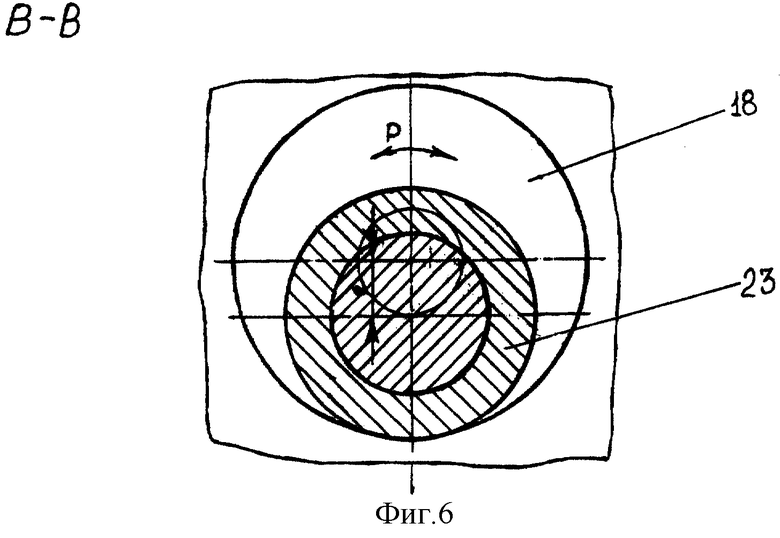
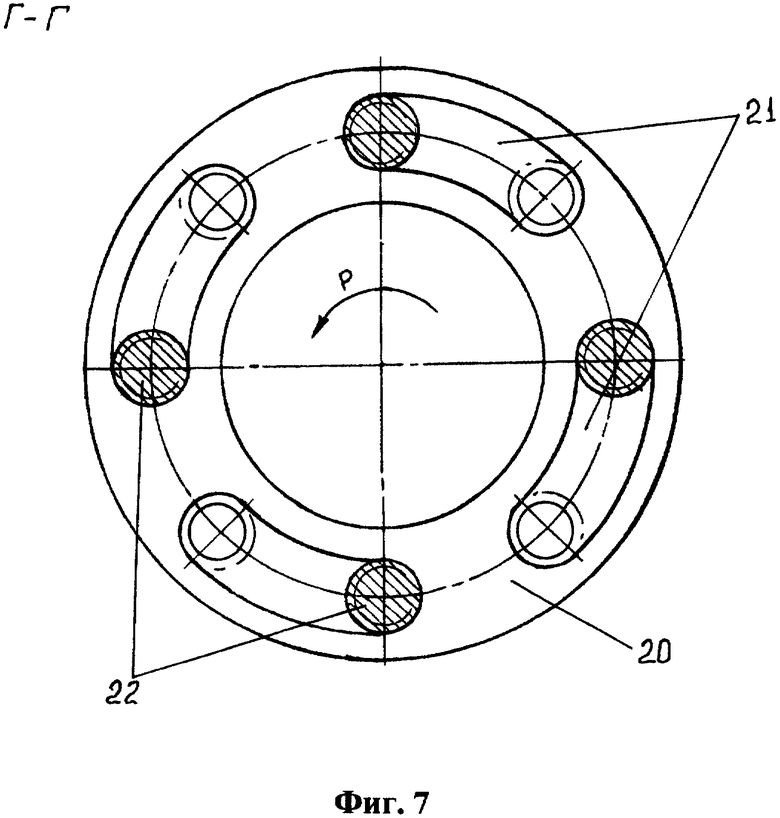
На фиг. 1 и фиг.2 представлены кинематические схемы привода в электромеханическом и ручном исполнениях соответственно; на фиг.3 и фиг.4 представлен продольный разрез конструкции привода в электромеханическом и ручном исполнениях соответственно; на фиг. 5 представлен разрез А-А фиг.3 в зоне ограничителя поворота выходного неполноповоротного вала; на фиг.6 представлен разрез В-В фиг.5; на фиг.7 представлен разрез Г-Г фиг.5.
Привод поворотного запорного органа трубопроводной арматуры содержит базовый модуль 1, размещенный в корпусе 2 с присоединительным фланцем 3, а также два съемных комплекта приставок 4 и 5. Приставка 4 предназначена для электромеханического исполнения привода, а приставка 5 - для ручного исполнения. Каждая из приставок размещена в своем корпусе с присоединительным фланцем, аналогичным присоединительному фланцу 3 корпуса базового модуля 2.
Базовый модуль 1 выполнен на базе плюсового планетарного редуктора, который содержит установленный на подшипниках 6 в корпусе 2 эксцентриковый входной вал-водило 7; установленный на нем посредством подшипников 8 двухвенцовый блок сателлита 9 с общей ступицей 10; закрепленное в корпусе 2 неподвижное входное центральное зубчатое колесо 11 с внутренними зубьями и подвижное выходное центральное зубчатое колесо 12 с внутренними зубьями, установленное на подшипниках 13 в корпусе 2 и соединенное с выходным неполноповоротным валом 14, который имеет возможность поворачиваться на угол 90±10o за счет ограничителя поворота. Выходной неполноповоротный вал 14 через компенсационную муфту 15 соединен с валом-поводком поворотного запорного органа запорной арматуры 16.
Ограничитель поворота неполноповоротного выходного вала 14 выполнен в виде двух регулируемых упоров 17, диаметрально закрепленных в корпусе 2 базового модуля 1. Каждый из упоров выполнен в виде вала 18, размещенного с возможностью поворота и фиксации его в отверстиях 19 приливов корпуса базового модуля 1 и имеющего фланец 20, в котором выполнены с равным угловым шагом две пары равных секторных пазов 21 с углом, равным 45o, под четыре крепежных элемента 22. На фланцах приливов корпуса базового модуля 1 с равномерным угловым шагом, равным 45o выполнены две группы резьбовых отверстий под четыре крепежных элемента 22. На торцах 20 валов эксцентрично их осям вращения закреплены оси, на которых установлены упорные ролики 23, размещенные в ответных секторных пазах 24 длиной по дуге, равной 105±15o, выполненных в выходном неполноповоротном валу 14. При этом ширина секторных пазов 21 составляет величину не менее суммы диаметра ролика и двух сумм эксцентриситета, который он имеет относительно осей валов 18, а расстояние по дуге между секторными пазами 24 с одной из сторон в сумме с величиной диаметра упорного ролика 23 по дуге равно 90o.
Первая приставка 4 (фиг.3) для электромеханического исполнения привода содержит рядовую двухпоточную зубчатую передачу с установленными в его корпусе паразитными колесами 25, вал 26 входного центрального зубчатого колеса 27, которой соединен с выходным валом управляемого электропривода (электродвигателя) 28, и выходное зубчатое колесо с внутренними зубьями 29, закрепленное на эксцентриковом входном валу-водиле 7 базового модуля 1.
Вторая приставка 5 (фиг. 4) для ручного исполнения привода содержит двухступенчатую передачу, выходная ступень которой аналогична передаче первой приставки, а входная ступень выполнена конической. Коническая ступень содержит входное коническое зубчатое колесо 30, которое установлено на валу 31 маховика 32, и выходное коническое зубчатое колесо 33, установленное на валу 26 входного центрального зубчатого колеса 27 выходной ступени.
Привод устанавливают на поворотном запорном органе запорной арматуры 16, ось поводка которой вертикальна. Компенсационной зубчатой муфтой 15 соединяют вал-поводок запорного органа 16 с выходным неполноповоротным валом 14 базового модуля 1.
В зависимости от условий эксплуатации привода к базовому модулю 1 по фланцу 3 присоединяют ту или иную приставку (4 или 5). В зависимости от этого привод имеет разные режимы работы.
Пример для электромеханического исполнения привода.
Привод работает следующим образом.
Вращение от управляемого электропривода (электродвигателя) 28 поступает на вал 26 входного центрального зубчатого колеса 27 приставки 4. Далее через два паразитных зубчатых колеса 25 и выходное зубчатое колесо 29 вращение передается входному эксцентриковому валу-водиле 7 базового модуля 1. В планетарном редукторе базового модуля 1 при неподвижном входном центральном зубчатом колесе 11 с внутренними зубьями вращение от эксцентрикового входного вала водила 7, сателлит 9 передается подвижному выходному центральному зубчатому колесу 12 с внутренними зубьями и далее на выходной неполноповоротный вал 14. Угол поворота которого ограничивается в пределах 90±10o.
Регулировку угла поворота выходного неполноповоротного вала 14 осуществляют следующим образом. Ослабляя четыре крепежных элемента 22 за счет секторных пазов 21, выполненных во фланцах 20 валов 18, производят их поворот в пределах 45o на заданный угол в отверстиях 19 регулируемых упоров 17. При этом упорные ролики 23 за счет эксцентриситета смещаются в ту или иную сторону относительно оси валов 18. Для поворота валов 18 на угол более чем 45o крепежные элементы извлекают их из одной группы резьбовых отверстий и переставляют их во вторую. За счет этого появляется возможность поворота валов 18 еще на 45o. Дальнейшее регулирование осуществляют аналогичным образом.
Разработанная конструкция привода в электромеханическом исполнении позволила обеспечить следующий коэффициент редуцирования:
Кэм=Кпр1•Кбм=7•71,37≈500,
где Kпр1 - коэффициент редуцирования первой приставки, Kпр1=7;
Кбм - коэффициент редуцирования базового модуля, Кбм=71,37.
С использованием маломощного электропривода (электродвигателя) мощностью ≈ 0,5 кВт с крутящим моментом на выходе, равным 180 Н•м, привод в электромеханическом исполнении позволяет обеспечить на выходе крутящий момент до 75 кН•м.
Пример для ручного исполнения привода.
По стандартам Газнадзора запрещается использовать маховик (штурвал) с вертикальной осью вращения, поскольку человек в этом случае имеет неестественное положение в момент вращения маховика 31. Выполнение во второй приставке 5 входной ступени конической позволяет занять оси вращения (передачи мощности) маховика горизонтальное положение. Вращение от маховика 32, коническую передачу с коническими зубчатыми колесами 30 и 33 входной ступени приставки 5, вал 26 входного центрального зубчатого колеса 27 выходной ступени приставки 5, далее через два паразитных зубчатых колеса 25 и выходное зубчатое колесо 29 передается входному эксцентриковому валу-водиле 7 базового модуля 1. Далее передача вращения в планетарном редукторе базового модуля 1 осуществляется аналогично в описанном выше примере при электромеханическом исполнении привода.
Разработанная конструкция привода в ручном исполнении позволила обеспечить следующий коэффициент редуцирования:
Кр=Kпр1•Кбм=Ккон•Кзуб•Кбм=3,5•3,5•71,37≈870,
где Ккон - коэффициент редуцирования входной конической ступени второй приставки, Ккон=3,5;
Кзуб - коэффициент редуцирования выходной зубчатой ступени второй приставки, Кзуб=3,5;
Кпр2 - коэффициент редуцирования второй приставки, Кпр2=Ккон•Кзуб=12,25;
Кбм - коэффициент редуцирования базового модуля Кбм=71,37;
При диаметре маховика, равном 0,5 м, и усилии оператора, не превышающем 300 Н, на валу маховика 32 развивается момент до величины 150 Н•м, а на выходе привода в ручном исполнении момент может достигать до 100 кН•м.
Скорость поворота запорного органа, которая обеспечивается данным приводом, вполне соответствует тем нормативным требованиям, которые им предъявляются.
Заявленный привод конструктивно прост, имеет простую компоновку, что практически не требует технического обслуживания, обеспечивая ему срок службу до 35 лет. Использование съемных приставок, кроме повышения редуцирования привода, позволяет легко переналаживать привод с ручного обслуживания на электромеханическое и наоборот, в зависимости от условий, в которых будет эксплуатироваться запорный орган.
Кинематическая схема привода и его конструктивное исполнение позволяет обеспечить кпд приводу более 0,8 и развить на выходном валу большие моменты при небольших моментах на входе.
Данный привод может найти широкое применение при эксплуатации магистральных нефтегазопроводов, в которых используются неполноповоротные запорные органы трубопроводной арматуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2196928C1 |
| ПРИВОД СКРЕБКОВОГО КОНВЕЙЕРА | 2000 |
|
RU2170204C1 |
| УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 2006 |
|
RU2307278C1 |
| ПРИВОД СКРЕБКОВОГО КОНВЕЙЕРА | 1997 |
|
RU2115610C1 |
| ПРИВОД СКРЕБКОВОГО КОНВЕЙЕРА | 1999 |
|
RU2149813C1 |
| ДВУХСТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2008 |
|
RU2402707C2 |
| ПРИВОД СКРЕБКОВОГО КОНВЕЙЕРА И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА | 1995 |
|
RU2087396C1 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| ПРИВОД ЗАБОРНОГО ОРГАНА ЩЕБНЕОЧИСТИТЕЛЬНОЙ МАШИНЫ | 2000 |
|
RU2175943C1 |
| СООСНЫЙ РЕДУКТОР | 2013 |
|
RU2529943C1 |
Изобретение относится к области машиностроения и предназначено для комбинированного управления запорными органами трубопроводной арматуры с поворотной пробкой в нефтегазодобывающей промышленности. Привод поворотного запорного органа трубопроводной арматуры содержит базовый модуль, размещенный в корпусе с присоединительным фланцем и выполненный на базе плюсового планетарного редуктора. Последний содержит установленный на подшипниках в корпусе эксцентриковый входной вал-водило, установленный на нем посредством подшипников двухвенцовый блок сателлита с общей ступицей, закрепленное в корпусе неподвижное входное центральное зубчатое колесо с внутренними зубьями и подвижное выходное центральное зубчатое колесо с внутренними зубьями, установленное на подшипниках в корпусе и соединенное с выходным валом. Привод снабжен также двумя съемными комплектами приставок. Каждая из приставок размещена в своем корпусе с присоединительным фланцем, аналогичным присоединительному фланцу корпуса базового модуля. Первая приставка для электромеханического исполнения привода содержит рядовую двухпоточную зубчатую передачу с паразитными колесами. Вал входного центрального зубчатого колеса последней соединен с двигателем. Выходное зубчатое колесо с внутренними зубьями закреплено на эксцентриковом входном валу-водиле базового модуля. Вторая приставка для ручного исполнения привода содержит двухступенчатую передачу. Выходная ступень последней аналогична передаче первой приставки. Входная ступень выполнена конической. Коническая ступень содержит входное коническое зубчатое колесо. Оно установлено на валу маховика. Выходное коническое зубчатое колесо установлено на валу входного центрального зубчатого колеса выходной ступени. Выходной вал, соединенный с подвижным выходным центральным зубчатым колесом с внутренними зубьями базового модуля, выполнен неполноповоротным с углом поворота на 90±10o и снабжен ограничителем поворота. Изобретение позволяет решить задачу обеспечения в маломощном приводе большого момента на выходе. 3 з.п. ф-лы.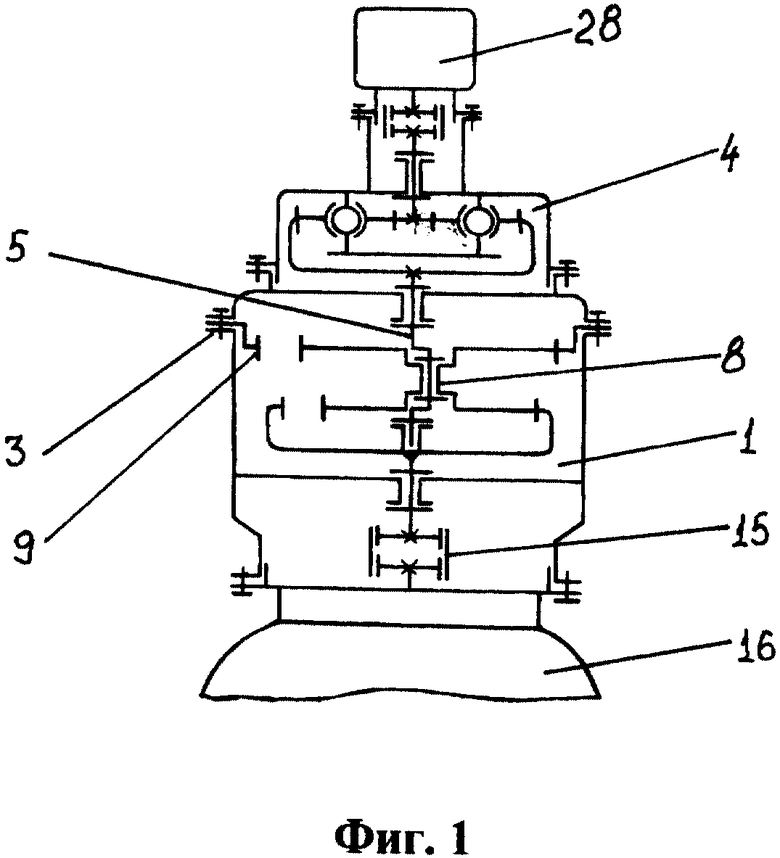
| Планетарный зубчатый редуктор | 1985 |
|
SU1384859A1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1999 |
|
RU2170871C1 |
| ПРИВОД ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ РЮД | 1996 |
|
RU2108513C1 |
| СПОСОБ ТРЕНИРОВКИ СПОРТСМЕНА | 1999 |
|
RU2160621C1 |
| US 4754949 A, 05.07.1988 | |||
| DE 3909150 A1, 12.10.1989 | |||
| Папироса, снабженная спичкой | 1926 |
|
SU10416A1 |
| Пуговица | 0 |
|
SU83A1 |

