Изобретение относится к области машиностроения, а именно к регулируемым многооборотным электроприводам с асинхронным электродвигателем. Области применения изобретения - водо- и теплоснабжение, системы вентиляции и кондиционирования воздуха, компрессорные установки, подъемно-транспортное оборудование, конвейерные линии различных производств, машины и агрегаты общепромышленного и специального назначения и т.п., т.е. там, где требуется плавная регулировка скорости вращения силовых установок.
Известны односателлитные и многосателлитные планетарные передачи, включающие входной вал-водило, который может быть кинематически связан с выходным валом ротора электродвигателя, в том числе асинхронного, неподвижное центральное колесо с внутренними эвольвентными зубьями, закрепленное в корпусе, выходное подвижное центральное колесо с внутренними эвольвентными зубьями, установленное на подшипниках в корпусе и жестко связанное с выходным валом, двухвенцовый сателлит или группа сателлитов с внешними эвольвентными зубьями, установленные на подшипниках на вале-водиле, зубья первых венцов которых зацеплены с зубьями неподвижного центрального колеса, а зубья вторых венцов - зацеплены с зубьями выходного подвижного центрального колеса, образуя две рабочих группы эвольвентных зацеплений (Планетарные передачи. Справочник. Под ред. докторов наук В.Н.Кудрявцева и Ю.Н.Кирдяшева. Л.: Машиностроение, Ленинградское отделение, 1977, стр.12-14, таблица 1.1., варианты, соответственно 6 и 5).
Известен привод поворотного органа трубопроводной арматуры по патенту РФ №2190144, МПК7 F16K 31/05, опубл. 27.09.2002 г., который выбран в качестве ближайшего аналога для заявляемого изобретения. Привод содержит корпус с присоединительным фланцем, размещенный в корпусе базовый модуль, выполненный на базе плюсового планетарного редуктора, содержащего входной вал-водило, установленный на нем двухвенцовый блок сателлита, закрепленное в корпусе неподвижное входное центральное зубчатое колесо с внутренними зубьями и подвижное выходное центральное зубчатое колесо с внутренними зубьями, соединенное с выходным валом. Привод также снабжен двумя съемными комплектами приставок, каждая из которых размещена в своем корпусе с присоединительным фланцем, аналогичным присоединительному фланцу корпуса базового модуля. Причем первая приставка для электромеханического исполнения привода содержит рядовую двухпоточную зубчатую передачу с паразитными колесами, вал входного центрального зубчатого колеса которой соединен с двигателем, например асинхронным, а выходное зубчатое колесо с внутренними зубьями закреплено на эксцентриковом входном валу-водиле базового модуля. Вторая приставка для ручного исполнения привода содержит двухступенчатую передачу, выходная ступень которой аналогична передаче первой приставки, а входная ступень выполнена конической. Коническая ступень содержит входное коническое зубчатое колесо, которое установлено на валу маховика, и выходное коническое зубчатое колесо, установленное на валу входного центрального зубчатого колеса выходной ступени.
Основные параметры базового модуля имеют следующие характеристики: разность между числами зубьев неподвижного входного центрального зубчатого колеса и подвижного выходного центрального зубчатого колеса выбирается из диапазона, равного 8...10, при числе зубьев выходного центрального колеса, выбираемого из диапазона 40...50. Разность между числами зубьев неподвижного входного центрального зубчатого колеса и находящегося с ним в зацеплении венца сателлита равна разности между числами зубьев подвижного выходного центрального зубчатого колеса и находящегося с ним в зацеплении венца сателлита и выбирается из диапазона 3...4.
Недостатком как аналогов, так и прототипа является то, что венцы двухвенцовых сателлитов имеют разное число зубьев и их геометрию. Это, в свою очередь, существенно усложняет технологию их изготовления и сборку силовой трансмиссии и, как следствие, приводит к ухудшению качественных показателей силовой трансмиссии, как по передаточному числу, так и по к.п.д.
Настоящее изобретение решает следующие задач: повышения нагрузочной способности, улучшения габаритно-массовых характеристик и конструктивного упрощения силовой трансмиссии управляемого электропривода, универсальности ее сборки, а также обеспечения в одном типоразмере габаритно-массовых характеристик его конструктивного исполнения широкого параметрического ряда выходных параметров по моменту и скорости с сохранением высоких значений к.п.д.
Поставленная задача решается двумя вариантами исполнения управляемого электропривода в зависимости от установленной мощности двигателя Рдв. и воспроизводимой передаточной функции  , в которых используется только выпукло-вогнутого контакта зубьев в зацеплениях силовой трансмиссии.
, в которых используется только выпукло-вогнутого контакта зубьев в зацеплениях силовой трансмиссии.
По первому варианту исполнения управляемого электропривода, когда мощность двигателя выбирается из диапазона 0,25 кВт≤Рдв.≤5 кВт, а воспроизводимая передаточная функция выбирается из диапазона  , он содержит фланцевый асинхронный электродвигатель, блок управления асинхронным электродвигателем и размещенную в едином корпусе силовую зубчатую трансмиссию на базе планетарной передачи с односателлитным исполнением. Силовая трансмиссия включает входной вал-водило, кинематически связанный с выходным валом ротора электродвигателя, неподвижное центральное колесо с внутренними эвольвентными зубьями zb, закрепленное в корпусе, выходное подвижное центральное колесо с внутренними эвольвентными зубьями za, установленное на подшипниках в корпусе и жестко связанное с выходным валом, один двухвенцовый сателлит с внешними эвольвентными зубьями, установленный на подшипниках на вале-водиле. Зубья zf первого венца, которого зацеплены с зубьями zb неподвижного центрального колеса, а зубья zg второго венца зацеплены с зубьями za выходного подвижного центрального колеса, образуя два рабочих эвольвентных зацепления. Новым в данном электроприводе является то, что зубчатые венцы двухвенцового сателлита выполнены полностью идентичными по числу зубьев и по их геометрическим параметрам. Причем число зубьев za выходного подвижного центрального колеса выбирается из диапазона 40≤za≤120, число зубьев zb неподвижного центрального колеса на 1, 2, 3 или 4 меньше числа зубьев za выходного подвижного центрального колеса, а число зубьев каждого венца сателлита zf и zg равно ближайшему целому числу, определяемому из выражения
, он содержит фланцевый асинхронный электродвигатель, блок управления асинхронным электродвигателем и размещенную в едином корпусе силовую зубчатую трансмиссию на базе планетарной передачи с односателлитным исполнением. Силовая трансмиссия включает входной вал-водило, кинематически связанный с выходным валом ротора электродвигателя, неподвижное центральное колесо с внутренними эвольвентными зубьями zb, закрепленное в корпусе, выходное подвижное центральное колесо с внутренними эвольвентными зубьями za, установленное на подшипниках в корпусе и жестко связанное с выходным валом, один двухвенцовый сателлит с внешними эвольвентными зубьями, установленный на подшипниках на вале-водиле. Зубья zf первого венца, которого зацеплены с зубьями zb неподвижного центрального колеса, а зубья zg второго венца зацеплены с зубьями za выходного подвижного центрального колеса, образуя два рабочих эвольвентных зацепления. Новым в данном электроприводе является то, что зубчатые венцы двухвенцового сателлита выполнены полностью идентичными по числу зубьев и по их геометрическим параметрам. Причем число зубьев za выходного подвижного центрального колеса выбирается из диапазона 40≤za≤120, число зубьев zb неподвижного центрального колеса на 1, 2, 3 или 4 меньше числа зубьев za выходного подвижного центрального колеса, а число зубьев каждого венца сателлита zf и zg равно ближайшему целому числу, определяемому из выражения  . При этом угол рабочего зацепления выходное подвижное центральное колесо - второй венец сателлита назначается из диапазона 15°≤αga≤20°, а угол рабочего зацепления неподвижное центральное колесо - первый венец сателлита определяется из выражения:
. При этом угол рабочего зацепления выходное подвижное центральное колесо - второй венец сателлита назначается из диапазона 15°≤αga≤20°, а угол рабочего зацепления неподвижное центральное колесо - первый венец сателлита определяется из выражения:

Для увеличения параметрического ряда выходных параметров по скорости и моменту в одном типоразмере электропривода у него неподвижное центральное колесо целесообразно выполнять сменным, и он комплектуется комплектом сменных неподвижных центральных колес с числом зубьев zb соответственно меньше на 1, или 2, или 3, или 4, числа зубьев za выходного подвижного центрального колеса.
Для улучшения динамических характеристик электропривода его вал-водило целесообразно снабдить противовесом сателлита для динамического его уравновешивания.
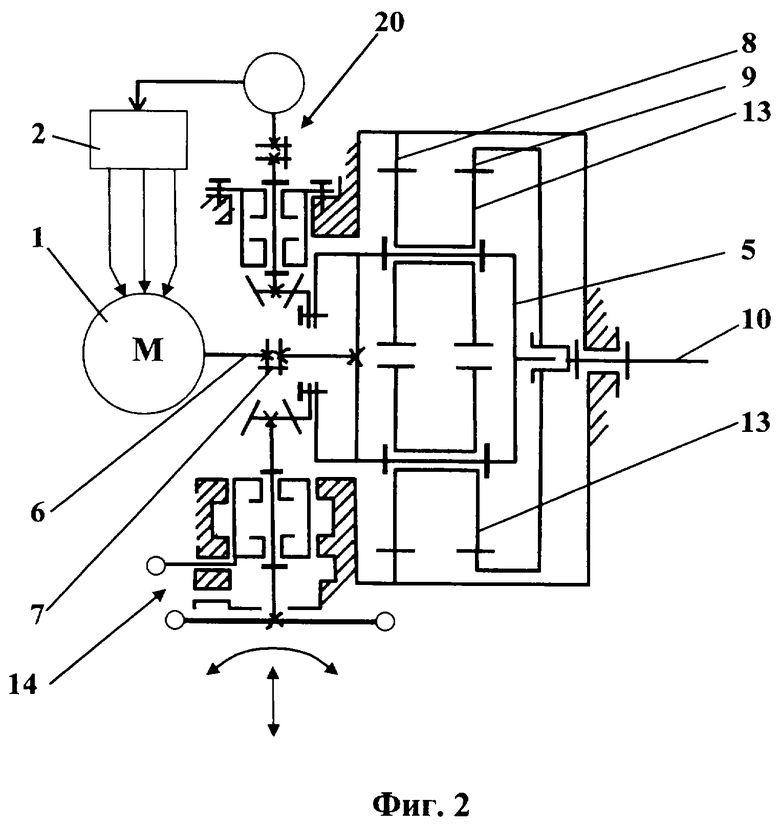
По второму варианту исполнения управляемого электропривода когда мощность двигателя выбирается из диапазона 2,5 кВт≤Рдв.≤100 (160) кВт, а воспроизводимая передаточная функция выбирается из диапазона  , он содержит фланцевый асинхронный электродвигатель, блок управления асинхронным электродвигателем и размещенную в едином корпусе силовую зубчатую трансмиссию на базе планетарной передачи с многосателлитным исполнением. Силовая трансмиссия включает входной вал-водило, кинематически связанный с выходным валом ротора электродвигателя, неподвижное центральное колесо с внутренними эвольвентными зубьями zb, закрепленное в корпусе, выходное подвижное центральное колесо с внутренними эвольвентными зубьями za, установленное на подшипниках в корпусе и жестко связанное с выходным валом, установленный на подшипниках на вале-водиле n двухвенцовых сателлитов, где 2≤n≤4. Двухвенцовые сателлиты выполнены с внешними эвольвентными зубьями, зубья zfn первых венцов которых зацеплены с зубьями неподвижного центрального колеса, а зубья zgn вторых венцов зацеплены с зубьями выходного подвижного центрального колеса, образуя две рабочие группы эвольвентных зацеплений. Новым в данном электроприводе является то, что зубчатые венцы всех двухвенцовых сателлитов выполнены полностью идентичными по числу зубьев и по их геометрическим параметрам. Причем число зубьев zg выходного подвижного центрального колеса выбирается из диапазона 40≤za≤120 и кратно числу сателлитов n. Число зубьев zb неподвижного центрального колеса меньше числа зубьев za выходного подвижного центрального колеса на величину равную числу сателлитов n, а число зубьев каждого венца всех сателлитов zfn и zgn равно ближайшему целому числу, выбираемому из выражения zfn=zgn=(0,5za-n). При этом угол рабочего зацепления выходное подвижное центральное колесо - второй венец каждого сателлита выбирается из диапазона 15°≤αgan≤20°, а угол рабочего зацепления неподвижное центральное колесо - первый венец каждого сателлита определяется из выражения:
, он содержит фланцевый асинхронный электродвигатель, блок управления асинхронным электродвигателем и размещенную в едином корпусе силовую зубчатую трансмиссию на базе планетарной передачи с многосателлитным исполнением. Силовая трансмиссия включает входной вал-водило, кинематически связанный с выходным валом ротора электродвигателя, неподвижное центральное колесо с внутренними эвольвентными зубьями zb, закрепленное в корпусе, выходное подвижное центральное колесо с внутренними эвольвентными зубьями za, установленное на подшипниках в корпусе и жестко связанное с выходным валом, установленный на подшипниках на вале-водиле n двухвенцовых сателлитов, где 2≤n≤4. Двухвенцовые сателлиты выполнены с внешними эвольвентными зубьями, зубья zfn первых венцов которых зацеплены с зубьями неподвижного центрального колеса, а зубья zgn вторых венцов зацеплены с зубьями выходного подвижного центрального колеса, образуя две рабочие группы эвольвентных зацеплений. Новым в данном электроприводе является то, что зубчатые венцы всех двухвенцовых сателлитов выполнены полностью идентичными по числу зубьев и по их геометрическим параметрам. Причем число зубьев zg выходного подвижного центрального колеса выбирается из диапазона 40≤za≤120 и кратно числу сателлитов n. Число зубьев zb неподвижного центрального колеса меньше числа зубьев za выходного подвижного центрального колеса на величину равную числу сателлитов n, а число зубьев каждого венца всех сателлитов zfn и zgn равно ближайшему целому числу, выбираемому из выражения zfn=zgn=(0,5za-n). При этом угол рабочего зацепления выходное подвижное центральное колесо - второй венец каждого сателлита выбирается из диапазона 15°≤αgan≤20°, а угол рабочего зацепления неподвижное центральное колесо - первый венец каждого сателлита определяется из выражения:

Как по первому, так и по второму вариантам исполнения электропривода ряд его конструктивных признаков может быть одинаков. Так вал-ротор электродвигателя может быть связан с входным валом-водилом силовой зубчатой трансмиссии посредством компенсирующей муфты.
Силовая трансмиссия может быть снабжена ручным приводом, установленным в ее корпусе и выполненным в виде силовой конической передачи, зубчатое ведомое колесо которой жестко закреплено на вале-водиле, а ведущая вал-шестерня снабжена штурвалом. Для обеспечения зацепления и расцепления зубьев вала-шестерни и зубчатого ведомого колеса ведущая вал-шестерня установлена на подшипниках в цилиндрическом затворе включения и отключения ручного привода, который снабжен рычагом, проходящим через фигурный паз корпуса, и установлен в корпусе с возможностью его осевого перемещения, поворота вокруг оси и фиксации крайних положений с помощью, например, гайки.
Электроприводы по первому и второму вариантам могут быть снабжены также датчиком угловых перемещений и угловых скоростей ротора асинхронного электродвигателя, который размещен в корпусе силовой зубчатой трансмиссии. Вал-ротор датчика перпендикулярен оси входного вала-водила и кинематически связан с ним посредством ускоряющей не силовой конической передачи, входная шестерня которой закреплена на вале-водиле, а электрический выход датчика угловых перемещений и угловых скоростей ротора асинхронного электродвигателя связан с блоком управления асинхронным электродвигателем.
Электроприводы по первому и второму вариантам могут быть снабжены одновременно и ручным приводом и датчиком угловых перемещений и угловых скоростей ротора асинхронного электродвигателя. При этом ручной привод установлен в корпусе трансмиссии на диаметрально расположенной стороне относительно датчика угловых перемещений и угловых скоростей ротора асинхронного электродвигателя, и выполнен в виде силовой конической передачи, зубчатое ведомое колесо которой жестко закреплено на вале-водиле и является одновременно входной шестерней привода датчика.
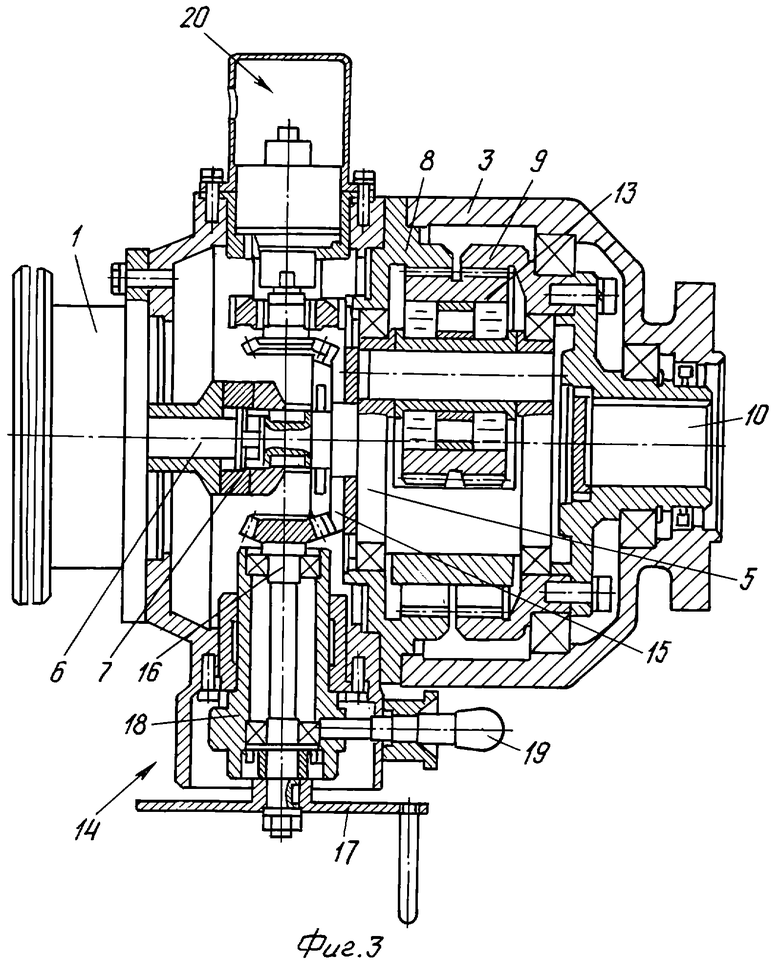
На фиг.1 представлена кинематическая схемы управляемого электропривода по первому варианту, а на фиг.2 - по второму варианту; на фиг.3 представлен продольный разрез силовой трансмиссии электропривода в односателлитном исполнении с ручным приводом и приводом датчика угловых перемещений и угловых скоростей ротора асинхронного электродвигателя.
Управляемый электропривод содержит фланцевый асинхронный электродвигатель 1, блок управления 2 асинхронным электродвигателем 1 и размещенную в едином корпусе 3 силовую зубчатую трансмиссию 4 на базе планетарной передачи. Силовая трансмиссия 4 включает входной вал-водило 5, кинематически связанный с выходным валом 6 ротора асинхронного электродвигателя 2 посредством компенсирующей муфты 7. В корпусе 3 силовой трансмиссии закреплено неподвижное центральное колесо 8, выходное подвижное центральное колесо 9, жестко связанное с выходным валом 10 электропривода.
В односателлитном исполнении электропривода (Фиг.1) планетарная передача содержит один двухвенцовый сателлит 11 с внешними идентичными у двух венцов эвольвентными зубьями, установленный на подшипниках на вале-водиле 5. Для увеличения параметрического ряда электропривода у него неподвижное центральное колесо 8 выполнено сменным. При этом силовая трансмиссия 4 снабжена комплектом 4-х сменных неподвижных центральных колес (на чертеже не показаны). Неподвижные центральные колеса 8 комплекта тождественны по посадочному диаметру и креплению с соблюдением условия их соосности со вторым центральным подвижным колесом 9 и сохранением рабочих эвольвентных зацеплений с первым венцом сателлита 8. Для этого геометрические параметры зубьев сменных центральных неподвижных колес 8, такие как диаметр впадин и диаметр выступов зубьев, выполняют сходными, а число зубьев задают различное. Причем число зубьев zb каждого сменного центрального неподвижного колеса 8 меньше, соответственно на 1, или на 2, или на 3, или на 4, числа зубьев za выходного подвижного центрального колеса 9. На вале-водиле 5 закрепляют противовес 12 сателлита 11.
В многосателлитном исполнении электропривода (Фиг.2) планетарная передача содержит 2, или 3, или 4 двухвенцовых сателлита 13. При этом неподвижное центральное колесо 8 выполнено несменным.
Силовая трансмиссия электропривода снабжается ручным приводом 14. Зубчатое ведомое колесо 15 ручного привода жестко закреплено на вале-водиле 5 силовой трансмиссии, а ведущая вал-шестерня 16 снабжена штурвалом 17. При этом ведущая вал-шестерня 16 установлена в цилиндрическом затворе 18 включения и отключения ручного привода 14. Цилиндрический затвор 18 снабжен рычагом 19, проходящим через фигурный паз корпуса (не показан), и установлен в корпусе с возможностью его осевого перемещения, поворота вокруг оси и фиксации его крайних положений.
Электроприводы по первому и второму вариантам могут быть снабжены также датчиком угловых перемещений и угловых скоростей 20 ротора асинхронного электродвигателя 1, который размещен в корпусе 3 силовой зубчатой трансмиссии 4. Вал-ротор датчика 21 перпендикулярен оси входного вала-водила 5 силовой трансмиссии 4 и кинематически связан с ним посредством ускоряющей несиловой конической передачи 22. Входной шестерней датчика является жестко закрепленное на вале-водиле 5 ведомое колесо 15 ручного привода. Электрический выход 23 датчика 20 связан с блоком управления 2 асинхронным электродвигателем 1.
Управляемый электропривод работает следующим образом.
При работе электропривода от асинхронного электропривода, ручной привод отключен, рычаг 19 находится в положении «о».
Вращение от управляемого асинхронного электродвигателя 2 поступает на входной вал-водило 5. При неподвижном центральном колесе 8 с внутренними эвольвентными зубьями вращение от вала-водила 5 через двухвенцовый сателлит 11 передается подвижному центральному колесу 9 с внутренними эвольвентными зубьями и далее на выходной вал 10 электропривода.
Для обеспечения на валу асинхронного электропривода заданного значения выходного момента используется блок управления 2 асинхронным электродвигателем 1, работающий, например, по способу векторного управления. Одними из управляющих компонентов управления асинхронным электродвигателем являются такие параметры, как угловые перемещения и скорость угловых перемещений ротора асинхронного электродвигателя 1. Данные параметры снимаются с помощью датчика угловых перемещений и угловых скоростей 20 с выхода асинхронного электродвигателя и передаются электрической связью 23 на вход его блока управления 2. Вращение с выхода асинхронного электродвигателя передается на вход датчика 21 посредством несиловой конической передачи 22 с ведомого колеса 15, жестко закрепленного на входном вале-водиле 5.
Работа привода в ручном исполнении.
Рычаг 19 расфиксируют, поворачивают и перемещают в осевом направлении из положения «о» в положение «в» по фигурному пазу, выполненному в корпусе силовой трансмиссии и имеющему, например, или «П»-образную, или «Z»-образную форму. При перемещении рычага 19 в осевом направлении перемещается и цилиндрический затвор 18 с ведущей вал-шестерней 16, которая входит в зацепление с зубчатым ведомым колесом 15, жестко закрепленным на вале-водиле 5. Данное положение затвора 18 с валом-шестерней 16 фиксируется посредством фиксации рычага 19, например, гайкой 24. При вращении штурвала 17 ручного привода вращение от него через вал-шестерню 16 передается ведомому колесу 15 и далее входному валу-водилу 5. При неподвижном центральном колесе 8 вращение от вала-водила 5 через сателлит 11 передается подвижному центральному колесу 9 и далее на выходной вал 10 привода.
Электропривод при многосателлитном исполнении работает аналогично, с различием в том, что вращение от вала-водила 5 передается параллельными потоками через несколько двухвенцовых сателлитов 13 подвижному центральному колесу 9.
Преимущество односателлитного исполнения силовой трансмиссии электропривода заключается в том, что воспроизводятся большие передаточные функции  , и в одном типоразмере габаритно-массовых характеристик конструктивного исполнения силовой трансмиссии, при простой смене лишь одного неподвижного центрального колеса, гарантируется построение параметрического ряда выходных параметров по скорости и моменту с сохранением высоких значений к.п.д.
, и в одном типоразмере габаритно-массовых характеристик конструктивного исполнения силовой трансмиссии, при простой смене лишь одного неподвижного центрального колеса, гарантируется построение параметрического ряда выходных параметров по скорости и моменту с сохранением высоких значений к.п.д.  . Поскольку коэффициент передачи силовой трансмиссии определяется по формуле:
. Поскольку коэффициент передачи силовой трансмиссии определяется по формуле:
а при za-zb=1 (или 2, или 3 или 4), соответственно, уменьшается и коэффициент передачи в 2, 3 или 4 раза.
Преимущество многопоточной схемы силовой трансмиссии состоит в том, что за счет передачи мощности со входа на выход параллельными потоками повышается энерговооруженность привода (до 2÷5 кГ массы на 1 кВт установленной мощности), что особо важно для современных высокопроизводительных технологических машин, так как решается глобальная проблема энерго- и ресурсосбережения.
Заявленный управляемый электропривод позволяет при заданном оптимальном (близком к стандартному) угле зацепления зубчатой пары: подвижное центральное колесо - второй венец двухвенцового сателлита, равном 15°÷20°, обеспечить рабочий угол второго зацепления: неподвижное центральное колесо - первый венец двухвенцового сателлита, не превышающий 35°. Заявленные соотношения числа зубьев центральных колес и числа зубьев венцов двухвенцовых сателлитов, а также идентичность зубьев венцов двухвенцовых сателлитов гарантируют полюсные зацепления зубчатых пар, обладающих большими к.п.д., при передаточных отношениях, лежащих в диапазоне от 40 до 100.
Кроме того, существенно упрощается конструкция силовой трансмиссии управляемого электропривода, повышается универсальность ее сборки, увеличивается нагрузочная способность и надежность за счет выпукло-вогнутого контакта зубьев в зацеплениях.
Выполнение зубьев двухвенцовых сателлитов полностью идентичными по числу зубьев и по их геометрическим параметрам позволяет нарезать их сразу за один проход инструмента при одной их установке, что существенно упрощает технологию и повышает точность изготовления зубьев.
Заявляемые параметры рабочих зацеплений силовой трансмиссии гарантируют ее высокую работоспособность, наилучшие условия пересопряжения зубьев в зацеплениях, исключающие все виды интерференции согласно теории зубчатых зацеплений при сохранении высоких качественных характеристик по коэффициенту перекрытия, углам зацеплений и коэффициенту полезного действия. Заявленные электроприводы хорошо компонуются в универсальные конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2196928C1 |
| ДВУХСТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2008 |
|
RU2402707C2 |
| УНИВЕРСАЛЬНЫЙ ВЫСОКОМОМЕНТНЫЙ МНОГООБОРОТНЫЙ ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2011 |
|
RU2457385C1 |
| ПРИВОД ПОВОРОТНОГО ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2190144C1 |
| ПРИВОД СКРЕБКОВОГО КОНВЕЙЕРА | 2000 |
|
RU2170204C1 |
| ЭЛЕКТРОПРИВОД НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА С УПРУГИМ ЗАЦЕПЛЕНИЕМ - ЭП ПЦР-У | 2007 |
|
RU2358375C2 |
| ПРИВОД ЗАБОРНОГО ОРГАНА ЩЕБНЕОЧИСТИТЕЛЬНОЙ МАШИНЫ | 2000 |
|
RU2175943C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| ПЛАНЕТАРНЫЙ ТОРЦОВЫЙ МОТОР-РЕДУКТОР | 1998 |
|
RU2150623C1 |
| МНОГОПОТОЧНАЯ БЕСПОДШИПНИКОВАЯ ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2023 |
|
RU2812085C1 |
Изобретение относится к области электротехники и машиностроения и касается особенностей конструктивного выполнения управляемых электроприводов, а именно - регулируемых многооборотных электроприводов с асинхронным электродвигателем. Технический результат, достигаемый при использовании настоящего изобретения, состоит в упрощении конструкции силовой трансмиссии управляемого электропривода и обеспечении универсальности ее сборки, в улучшении массогабаритных характеристик управляемого электропривода в одном его типоразмере при одновременном увеличении нагрузочной способности и надежности управляемого электропривода, обеспечении высоких значений его выходных параметров по моменту и скорости при сохранении высоких значений к.п.д. Сущность изобретения по первому и второму вариантам его осуществления состоит в том, что предлагаемый электропривод содержит фланцевый асинхронный электродвигатель, блок управления асинхронным электродвигателем и размещенную в едином корпусе силовую зубчатую трансмиссию, выполненную на базе планетарной передачи с односателлитным или с многосателлитным исполнением. Силовая трансмиссия включает входной вал-водило, связанный кинематически с выходным валом ротора электродвигателя, неподвижное центральное колесо, закрепленное в корпусе, выходное подвижное центральное колесо, установленное в корпусе и жестко связанное с выходным валом, один, или два, или три, или четыре двухвенцовых сателлита, установленные на подшипниках на вале-водиле. Приведены конкретные параметрические параметры зубчатых передач. 2 н. и 10 з.п. ф-лы, 3 ил.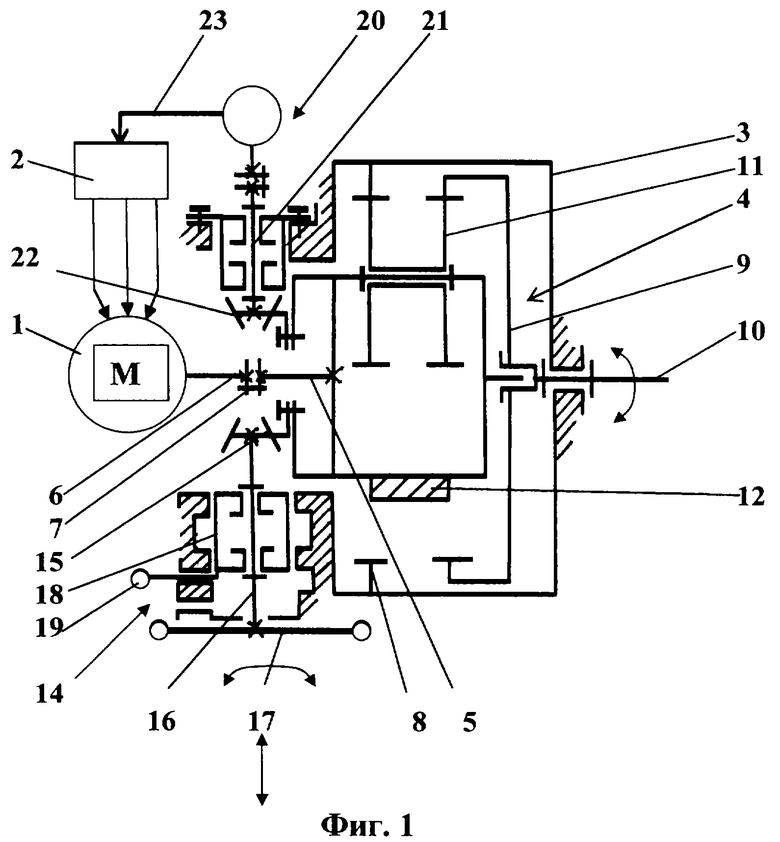
 , при этом угол рабочего зацепления za-zg выходное подвижное центральное колесо - второй венец сателлита назначается из диапазона 15°≤αga<20°, а угол рабочего зацепления zb-zf неподвижное центральное колесо - первый венец сателлита определяется из выражения
, при этом угол рабочего зацепления za-zg выходное подвижное центральное колесо - второй венец сателлита назначается из диапазона 15°≤αga<20°, а угол рабочего зацепления zb-zf неподвижное центральное колесо - первый венец сателлита определяется из выражения


| ПРИВОД ПОВОРОТНОГО ЗАПОРНОГО ОРГАНА ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2001 |
|
RU2190144C1 |
| Способ нанесения полупрозрачного слоя порошка кремнекислого цинка на стеклянную поверхность | 1927 |
|
SU22214A1 |
| Электропривод арматуры | 1990 |
|
SU1747790A1 |
| ПРИВОД ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ РЮД | 1996 |
|
RU2108513C1 |
| ЭЛЕКТРОПРИВОД | 2004 |
|
RU2258168C1 |
| US 4896562 А, 30.01.1990 | |||
| JP 5505774 A1, 28.04.1980 | |||
| DE 3912464 A1, 18.10.1990 | |||
| Пуговица | 0 |
|
SU83A1 |
| Планетарные передачи | |||
| Справочник./ Под ред | |||
| В.Н.Кудрявцева и Ю.Н.Кирдяшева | |||
| Ленинградское отделение: Машиностроение, 1977, с.12-14, табл.1.1, вар | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

