Изобретение относится к машиностроению, а именно к способам контроля шаров, и может быть использовано в подшипниковой промышленности для промежуточного и окончательного контроля шаров.
Известны аналогичные способы контроля шаров (патенты 1837150, БИ 32, 92; 2075723, БИ 8, 97; 2075724, БИ 8, 97), включающие подачу шара в рабочую зону контроля; установку шара между двумя опорами; вращение опор вокруг своих осей; контроль шаров в разных сечениях; удаление шара из рабочей зоны; сортировку шаров согласно результату контроля. Известные способы контроля имеют недостаточную производительность и технологические возможности.
Наиболее близко по своей технической сущности к заявляемому способу подходит в качестве прототипа способ контроля (патент 2066841, БИ 26, 96), при котором подают шары в рабочую зону, устанавливают шары между двумя опорами, вращают шары вокруг своего центра путем вращения опор вокруг своих осей со скоростями, разными по величине и направлению, контролируют шары в различных неповторяющихся сечениях и удаляют их из рабочей зоны, после чего сортируют согласно результату контроля. Способ-прототип не обеспечивает требуемых технологических возможностей, так как различные измеряемые сечения шара имеют разные диаметры, и нет требуемой производительности.
Технической задачей является расширение технологических возможностей путем обеспечения более рациональной траектории вращения шара относительно измерителя и повышение производительности контроля.
Для решения указанной технической задачи в способе контроля шаров, при котором шары подают в рабочую зону через загрузочное отверстие первой опоры, устанавливают шары между двумя размещенными на корпусе с базовой плоскостью основания опорами, выполненными в виде двух соосных обратных друг другу конусов, вращают опоры вокруг своих осей с разными по величине и направлению скоростями, измеряют при этом требуемые параметры шара в различных неповторяющихся сечениях, удаляют шары из рабочей зоны через смещенное относительно загрузочного разгрузочное отверстие первой опоры, задают форму, расположение и взаимную ориентацию пятен контакта шара с опорами, при этом размещают первую опору осью перпендикулярно базовой плоскости основания, располагают опоры осями перпендикулярно друг другу, последовательно подают, устанавливают, удаляют и одновременно измеряют несколько шаров, вторые опоры, количество которых соответствует количеству одновременно измеряемых шаров, применяют из двух самостоятельно приводимых во вращение, подпружиненных к шарам конусов, а скорости шаров в пятнах контакта их с конусами вторых опор выбирают разными, при этом вторые опоры располагают равномерно по периферии первой опоры с угловым шагом, достаточным для контроля шаров.
Отличительными признаками заявляемого способа контроля являются введение нескольких новых операций, а именно обеспечение последовательной подачи, установки и удаление и одновременное измерение нескольких шаров, использование нескольких вторых опор, количество которых соответствует количеству одновременно измеряемых шаров, каждую из вторых опор применяют из двух самостоятельно приводимых во вращение, подпружиненных к шарам конусов, а также выбор разных скоростей шаров в пятнах контакта их с конусами вторых опор. Эти отличительные признаки позволяют повысить производительность и расширить технологические возможности контроля. Так, одновременное измерение нескольких шаров сокращает время контроля во столько раз в среднем, сколько шаров одновременно измеряют. При этом возможно измерение как одинаковых шаров во всех рабочих позициях, так и разных. Этим расширяют технологические возможности. Сокращаются производственные площади и рабочая сила. Кроме того, сообщение шару другой траектория вращения по сравнению с прототипом дополнительно расширяет технологические возможности и повышает точность контроля, т. к. этим обеспечивается контроль в разных сечениях шара на постоянном его диаметре. Все сечения проходят через центр шара, что было невозможно в способе-прототипе.
Названные отличительные признаки отсутствуют в известных технических решениях. Они имеют логическую следственную связь с результатами решения технической задачи. Поэтому они существенны.
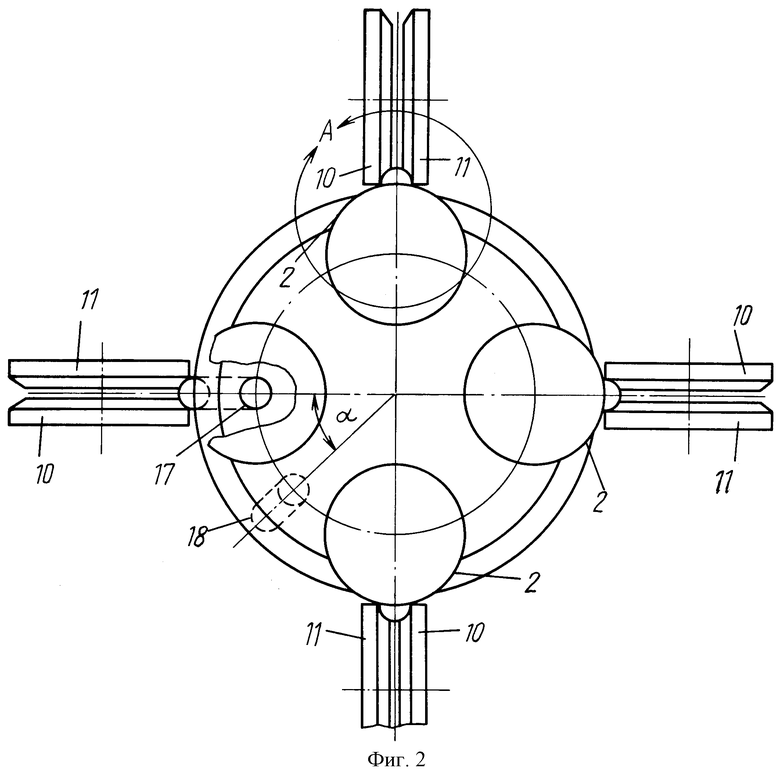
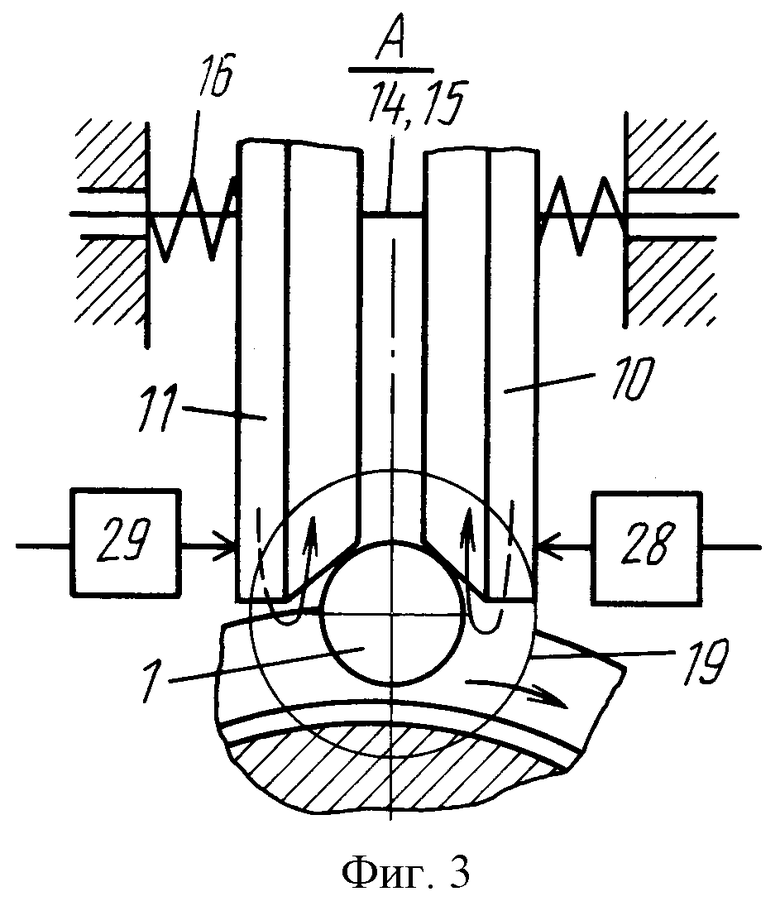
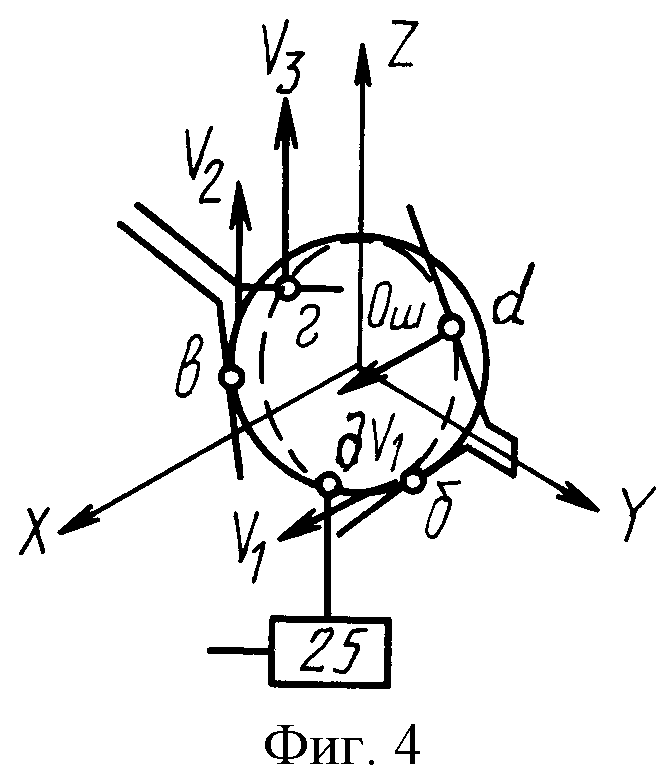
В графических материалах заявки содержатся: фиг.1 - схема контроля и устройства, вид спереди; фиг.2 - то же, вид сверху; фиг.3 - зона контакта шара и опор, вид А; фиг.4 - схема контакта шара.
Способ контроля в статике. Шары 1, подлежащие контролю, располагаются в емкостях 2 с отсекателями 3. Первая опора 4 имеет форму диска с наружной канавкой, образованной двумя усеченными конусами 5, 6, соосными, обращенными друг к другу малыми основаниями. Первая опора 4 располагается своей осью 7 перпендикулярно по отношению к базовой плоскости 8 основания корпуса 9 устройства. Она имеет возможность вращения вокруг оси 7, от двигателя через передачи, условно не показанные. Вторые опоры выполнены в виде двух самостоятельных дисков 10, 11 с рабочей поверхностью наружных усеченных конусов 12, 13, соосными, обращенными малыми основаниями друг к другу. Вторые опоры 10, 11 располагаются осями 14, 15 перпендикулярно осям 7 первых опор 4 с возможностью вращения вокруг собственных осей 14, 15 от двигателя через передачи, также условно не показанные. Шары 1 после установки имеют возможность контактировать с поверхностями конусов 5, 6 первой опоры 4 и конусов 12, 13 дисков 10, 11 вторых опор. При этом шары лишаются шести степеней свободы, так как поверхности конусов 5, 6, 12, 13 имитируют две взаимно перпендикулярные призмы. Силовое замыкание шаров 1 на первых опорах 4 дисками 10, 11 вторых опор обеспечивается посредством пружин 16. Первые опоры 4 снабжены загрузочным 17 и разгрузочным 18 отверстиями, смещенными относительно друг друга на угол α. Через отверстия 17, 18 шары имеют возможность поступать и удаляться из рабочей зоны 19 контроля. Разгрузочное отверстие 18 имеет возможность при повороте первой опоры 4 расположиться против трубопровода 20 с краном 21, который соединен с емкостями 22 и 23 для годных и негодных шаров соответственно. Блок управления 24 соединен с измерителем 25 контролируемых параметров шара 1, измерителем 26 угла поворота, измерителем 27 скорости вращения первой опоры 4, измерителями скоростей вращения дисков 10, 11 второй опоры, отсекателем 3, краном 21, двигателями вращения (не показаны) дисков 10, 11. Число блоков управления 24 и всех соединенных с ними вышеперечисленных элементов соответствует числу одновременно измеряемых шаров 1. Остальные блоки управления и связанные с ними элементы условно не показаны. Их общее количество может быть разным, например четыре. Они полностью идентичны по назначению, но по размерам могут быть разными в зависимости от размеров контролируемых шаров. Описание устройства и работы одного из них в равной степени относится к каждому из них. Отсекатель 3 имеет возможность по команде от блока 24 управления открывать доступ шару 1 из емкости 2 через загрузочное отверстие 17 в рабочую зону 19 контроля. Кран 21 имеет возможность по команде от блока 24 управления открывать доступ шару 1 в одну из емкостей 22 или 23. Измеритель 25 параметров шара 1 в виде, например, оптического чувствительного элемента либо контактного или бесконтактного индуктивного датчиков имеет возможность подавать в блок 24 управления сигналы о величине, например, отклонений от круглости шара 1 либо физико-механических свойствах его поверхностного слоя (шероховатость, микротвердость). Измеритель 26 угла поворота первой опоры 4 имеет возможность подавать в блок 24 управления информацию об угловом положении загрузочного 17 и разгрузочного 18 отверстий. Блок 24 управления имеет возможность получать сигналы от измерителей 25...29 и на основе полученной информации давать команды на срабатывание отсекателя 3, крана 26 и управление двигателями вращения дисков 10, 11. Шары 1 имеют каждый по четыре пятна контакта: а, б - с первой опорой 4; в - с диском 10; г - с диском 11 второй опоры соответственно. Точки а, б, в, г располагается попарно противоположно друг другу в перпендикулярных плоскостях на равном расстоянии каждой из опор от центра шара - 0ш. При этом выбираются аналогичные равные формы, размеры всех четырех пятен контакта. Первая опора 4 имеет возможность сообщать шару 1 в точках а, б контакта одинаковые скорости V1. Вторая опора в виде дисков 10 и 11 имеет возможность сообщать шару 1 в точках пятен в, г контакта разные скорости V2 и V3 соответственно. В результате сложения названных скоростей точка д измерения имеет возможность описывать на поверхности шара 1 кривые в виде спирали, каждая точка которой соответствует неповторяющемуся сечению шара 1, проходящему через его центр 0ш.
Способ контроля в динамике. Перед работой устройство настраивают. Устанавливают опоры 4, 10, 11, соответствующие типоразмеру шара 1 или нескольким типоразмерам, подлежащим контролю шаров. По эталонному шару или нескольким шарам настраивают измерители 25...29 и блоки 24 управления. Настраивают усилие прижима дисков 10, 11 к шару 1 подбором и регулировкой пружин 16. Устанавливают требуемое расположение загрузочного и разгрузочного отверстий 17 и 18. В емкость 2 засыпают партию шаров 1, подлежащих контролю. Включают блок 24 управления, приводы вращения первой опоры 4 и дисков 10, 11 второй опоры. По команде блока 24 управления отсекатель 3 открывается, шары I перемещаются по загрузочному отверстию 17 в рабочую зону 19. Шар 1 контактирует одновременно в точках а, б с поверхностями конусов первой опоры 4, где шару 1 сообщается скорость V1 вращения вокруг его центра 0 и в точках в, г контакта с поверхностями конусов дисков 10, 11, в которых ему сообщают скорости V2 и V3 соответственно. В результате сложения скоростей шар 1 получает сложное вращательное движение вокруг всего центра 0ш, при котором, например, точка д его поверхности относительно измерителя описывает неповторяющуюся кривую. Каждая точка этой кривой находится в радиальном сечении шара 1. Измерители 25...29 подают сигналы в блок 24 управления о величине контролируемого параметра шара 1, угла поворота первой опоры 4, скоростях вращения первой опоры, скоростях вращения дисков 10, 11. При необходимости коррекции траектории шара 1 подается сигнал на приводы дисков 10 и 11, производится изменение их угловой скорости. После совпадения оси разгрузочного отверстия 18 с центром 0ш шара 1 он попадает по разгрузочному отверстию 18 в полость крана 21. По команде блока 24 управления в зависимости от результатов контроля кран 21 отсылает измеренный шар 1 в емкость 22 годных либо в емкость 23 негодных шаров. Срабатывает отсекатель 3, подавая очередной шар 1 из емкости 2 в зону контроля.
Пример реализации. Подвергается контролю, например, партия шаров диаметром 1/2 дюйма - 12,7 мм на наличие огранки. Допуск на огранку составляет 0,001 мм. Партию шаров засыпают в емкость 22. После включения привода первой опоры 4 и дисков 10, 11 вторых опор блок 24 управления выдает команду отсекателю и дальнейшая работа устройства в каждой, например, из четырех позиций происходит согласно описанному выше порядку. По окончании контроля шары оказываются в емкости 22 или 23 в зависимости от их годности. При этом в каждой позиции возможен контроль шаров 1 разных размеров.
Способ контроля позволяет резко увеличить производительность, расширить технологические возможности путем одновременного измерения нескольких шаров, в том числе разноразмерных, повысить точность и достоверность контроля.
Экономическую эффективность заявляемого способа контроля определяют сравнением себестоимостей контроля при новом способе и способе-прототипе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1999 |
|
RU2212630C2 |
| СПОСОБ КОНТРОЛЯ ШАРОВ | 2000 |
|
RU2198377C2 |
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1992 |
|
RU2066841C1 |
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1991 |
|
RU2075723C1 |
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1990 |
|
RU2019786C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШАРОВ | 1990 |
|
RU2019784C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ВРАЩЕНИЯ ВАЛА | 2001 |
|
RU2203776C2 |
| СПОСОБ КОНТРОЛЯ ОТКЛОНЕНИЙ ОТ ПЛОСКОСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2168150C2 |
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1990 |
|
RU2019785C1 |
| СПОСОБ ОБРАБОТКИ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ | 1994 |
|
RU2084314C1 |
Изобретение относится к области машиностроения, а именно к способам контроля шаров, и может быть использовано в подшипниковой промышленности для промежуточного и окончательного контроля шаров. Способ заключается в том, что задают форму, расположение и взаимную ориентацию пятен контакта шара с опорами. Шары подают в рабочую зону через загрузочное отверстие первой опоры. Шары устанавливают между двумя размещенными на корпусе с базовой плоскостью основания опорами. Первая опора выполнена в виде диска с наружной канавкой, образованной двумя соосными усеченными конусами, малые основания которых обращены друг к другу, и размещена осью вращения перпендикулярно базовой плоскости основания. Вторая опора размещена осями вращения перпендикулярно первой. Вращают опоры вокруг своих осей с разными по величине и направлению скоростями, измеряют при этом требуемые параметры шара в различных неповторяющихся сечениях. Удаляют шары из рабочей зоны через смещенное относительно загрузочного разгрузочное отверстие первой опоры. Причем одновременно подают, устанавливают и измеряют, а затем удаляют несколько шаров. Вторые опоры, количество которых соответствует количеству одновременно измеряемых шаров, выполнены в виде двух самостоятельных приводимых во вращение дисков, подпружиненных к шарам, с рабочей поверхностью наружных усеченных конусов, соосных, обращенных малыми основаниями друг к другу. Скорости шаров в пятнах контакта их с рабочими поверхностями дисков вторых опор выбирают разными. Вторые опоры располагают равномерно по периферии первой опоры с угловым шагом, достаточным для контроля шара. Техническим результатом изобретения является повышение производительности и повышение точности контроля шаров. 4 ил.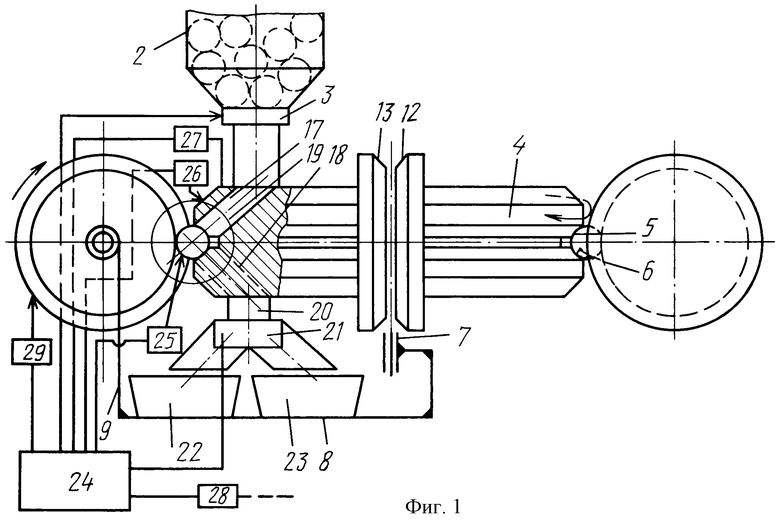
Способ контроля шаров, при котором задают форму, расположение и взаимную ориентацию пятен контакта шара с опорами, шары подают в рабочую зону через загрузочное отверстие первой опоры, шары устанавливают между двумя размещенными на корпусе с базовой плоскостью основания опорами, причем первая опора выполнена в виде диска с наружной канавкой, образованной двумя соосными усеченными конусами, малые основания которых обращены друг к другу и размещена осью вращения перпендикулярно базовой плоскости основания, а вторая опора размещена осями вращения перпендикулярно первой, вращают опоры вокруг своих осей с разными по величине и направлению скоростями, измеряют при этом требуемые параметры шара в различных неповторяющихся сечениях, удаляют шары из рабочей зоны через смещенное относительно загрузочного разгрузочное отверстие первой опоры, отличающийся тем, что одновременно подают, устанавливают и измеряют, а затем удаляют несколько шаров, при этом вторые опоры, количество которых соответствует количеству одновременно измеряемых шаров, выполнены в виде двух самостоятельных приводимых во вращение дисков, подпружиненных к шарам, с рабочей поверхностью наружных усеченных конусов, соосных, обращенных малыми основаниями друг к другу, причем скорости шаров в пятнах контакта их с рабочими поверхностями дисков вторых опор выбирают разными, а вторые опоры располагают равномерно по периферии первой опоры с угловым шагом, достаточным для контроля шара.
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1991 |
|
RU2075723C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШАРОВ | 1992 |
|
RU2075724C1 |
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1992 |
|
RU2066841C1 |
