Изобретение относится к машиностроению, в частности к способам контроля шаров, и может быть использовано в подшипниковой промышленности для промежуточного и окончательного контроля шаров.
Известны аналогичные способы контроля шаров (патенты 1837150, БИ 26,96; 2066841, БИ 26,96; 2075723, БИ, 8, 97; 2075724, БИ, 8, 97),включающие подачу шара в рабочее пространство измерения; установку шара между двумя опорами; вращение опор вокруг своих осей; контроль шара в разных сечениях; удаление шара из рабочего пространства; сортировку шара согласно результату контроля. Известные способы контроля достаточно производительны, но имеют ограниченные технологические возможности.
Наиболее близко по своей технической сущности к заявляемому способу подходит в качестве прототипа способ контроля (патент 2066841; БИ 26, 1996), при котором подают шары в рабочую зону, устанавливают шары между двумя опорами, вращают шары вокруг своего центра и опоры вокруг своих осей со скоростями, разными по величине и направлению, контролируют шары в различных сечениях и удаляют их из рабочей зоны. Способ-прототип не обеспечивает нужных технологических возможностей, т.к. различные сечения шара, в которых контролируют параметры его, имеют разные диаметры и параллельны.
Технической задачей является расширение технологических возможностей путем обеспечения более рациональной траектории движения шара относительно измерителя.
Для решения указанной технической задачи в способе контроля шаров, при котором шары подают в рабочую зону через загрузочное отверстие первой опоры, устанавливают шары между двумя опорами, размещенными на корпусе с базовой плоскостью основания, выполненными в виде двух соосных, обратных друг другу конусов, вращают опоры вокруг своих осей с разными по величине и направлению скоростями, измеряют при этом требуемые параметры шара в различных неповторяющихся сечениях, удаляют шары из рабочей зоны через смещенные относительно загрузочного разгрузочное отверстие первой опоры, задают форму, расположение и взаимную ориентацию пятен контакта шара с опорами, при этом размещают первую опору осью перпендикулярно базовой плоскости основания, располагают опоры осями вращения перпендикулярно друг другу, производят контроль шара за время поворота первой опоры на угол (300o-α), a подачу и удаление шара из нее - за время поворота на угол α. Вторую опору выполняют из двух самостоятельно приводимых во вращение, подпружиненных к шару конусов, а скорости вращения шара в точках контакта его с конусами второй опоры выбирают разными.
Отличительными признаками заявляемого способа контроля является введение новой операции - сообщение шару разных скоростей вращения его в точках контакта со второй опорой и использование второй опоры в виде двух самостоятельно приводимых частей. Это позволяет измерять шар в неповторяющихся сечениях одинакового диаметра, чем расширяют технологические возможности способа контроля и повышают точность контроля. В способе-прототипе эту задачу решить невозможно. В других известных технических решениях нет такого признака. Следовательно, он является существенным.
Графические материалы заявки содержат:
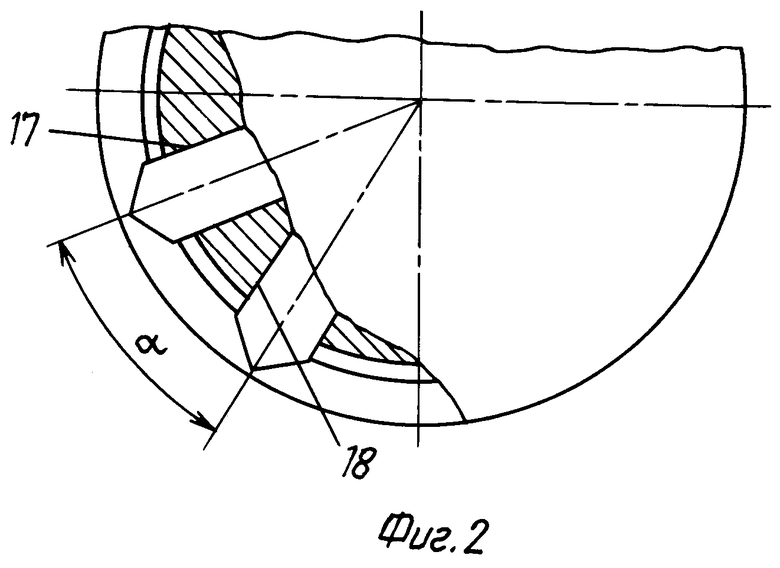
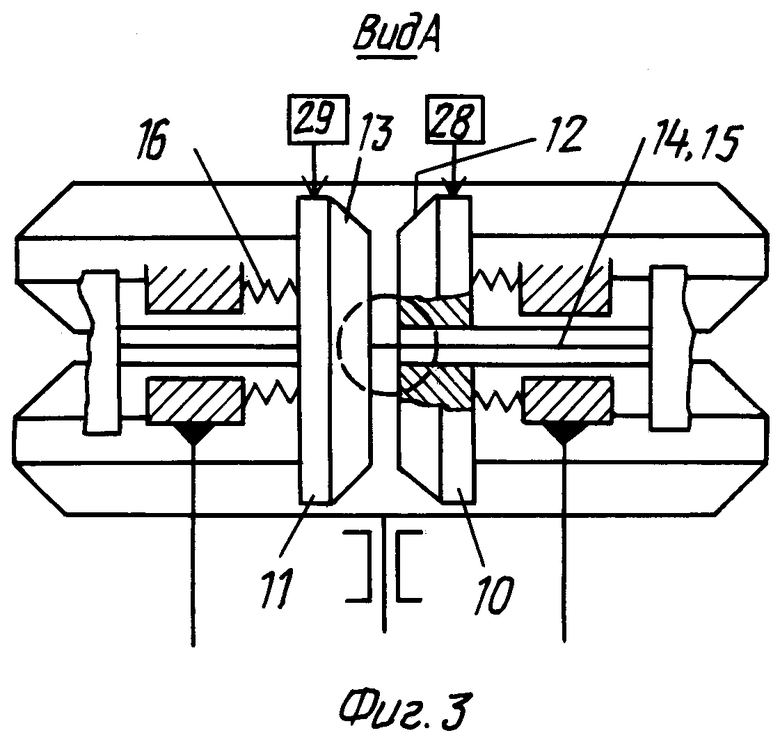
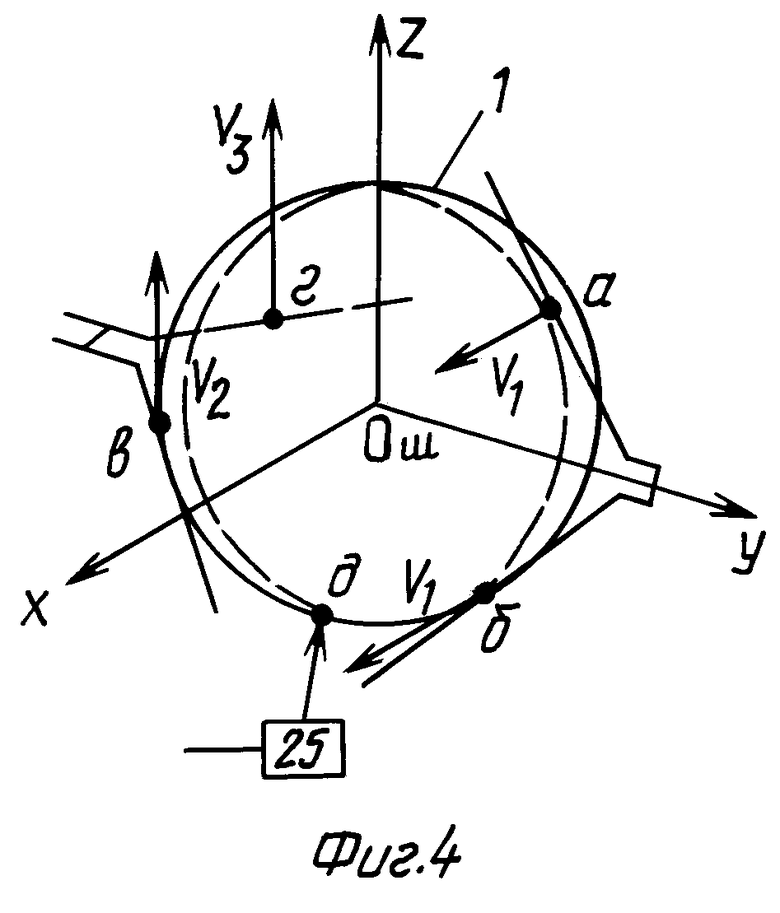
фиг.1 - общий вид схемы контроля и устройства - вид спереди; фиг.2 - вид на первую опору - вид сверху; фиг.3 - вид А; фиг.4 - схема контактирования шара с опорами и его скоростей.
Способ контроля в статике. Шар 1, подлежащий контролю, располагают в емкости 2, имеющей отсекатель 3. Первую опору 4 в виде диска с наружной канавкой, образованной двумя усеченными конусами 5, 6, соосными, обращенными друг к другу малыми основаниями, располагают осью 7 перпендикулярно по отношению к базовой плоскости 8 основания корпуса 9 устройства с возможностью вращения вокруг собственной оси 7. Первую опору 4 приводят в действие от двигателя и через передачи, условно не показанные. Вторая опора в виде двух самостоятельных дисков 10, 11 с наружными усеченными конусами 12, 13, соосными, обращенными малыми основаниями друг к другу, расположены осями 14, 15 перпендикулярно оси 7 с возможностью вращения вокруг собственных осей 14, 15 от двигателя через передачи (условно не показаны). Шар 1 после установки имеет возможность контактировать с поверхностями конусов 5, 6 первой опоры 4 и конусов 12, 13 дисков 10, 11 второй опоры. При этом шар 1 лишают шести степеней свободы, т. к. конусы 5, 6, 12, 13 имитируют две взаимно перпендикулярные призмы. Для обеспечения равномерного силового замыкания конусы 12, 13 подпружинены пружинами 16 к шару 1 относительно корпуса 9. Первую опору 4 снабжают загрузочным 17 и разгрузочным 18 отверстиями, смещенными друг к другу под углом α, через которые шар 1 имеет возможность поступать и удаляться из рабочей зоны 19 контроля. На выходе разгрузочного отверстия 18 расположен трубопровод 20 и кран 21, соединенный с емкостями 22 и 23 соответственно для годных и негодных шаров. Блок 24 управления соединен с измерителем 25 параметров шара 1, измерителем 26 угла поворота, измерителем 27 скорости вращения первой опоры, измерителями 28, 29 скорости вращения дисков 10, 11 второй опоры, отсекателем 3, краном 21, двигателями вращения дисков 10, 11. 0тсекатель 3 имеет возможность по команде от блока 24 управления открывать доступ шару 1 из емкости 2 через загрузочное отверстие 17 в рабочую зону 19 контроля. Кран 21 имеет возможность по команде от блока 24 управления открывать доступ шару 1 в одну из емкостей 22 или 23. Измеритель 25 параметров шара 1 в виде, например, оптического чувствительного элемента либо контактного или бесконтактного индуктивных датчиков имеет возможность подавать в блок 24 управления сигналы о величине, например, отклонений радиуса шара 1 либо физико-механических свойств его поверхностного слоя (шероховатость, микротвердость). Измеритель 26 угла поворота первой опоры 4 имеет возможность подавать в блок 24 управления информацию об угловом положении загрузочного 17 и разгрузочного 18 отверстий. Блок 24 управления имеет возможность получать сигналы от измерителей 25...29 и на основе полученной информации давать команды на срабатывание отсекателя 3, крана 26 и управление двигателями вращения дисков 10, 11. Шар 1 имеет четыре пятна контакта: а, б - с первой опорой 4, в - с диском 10, г - с диском 11 второй опоры соответственно. Точки а, б и в, г располагают попарно противоположно друг другу в перпендикулярных плоскостях на равном расстоянии каждой пары от центра шара 1 - 0ш. При этом выбирают аналогичные равные формы, размеры всех четырех пятен контакта. Силовое замыкание имеют возможность обеспечивать пружины 16. Первая опора 4 имеет возможность сообщать шару 1 в точках пятен а, б контакта одинаковые скорости V1. Вторая опора в виде дисков 10 и 11 имеет возможность сообщать шару 1 в точках пятен в, г, контакта разные скорости V2 и V3 соответственно. В результате точка д измерения имеет возможность описывать на поверхности шара 1 спираль, каждая точка которой соответствует неповторяющемуся сечению шара 1, проходящему через его центр Ош.
Перед работой устройство настраивается. Устанавливают опоры 4, 10, 11, соответствующие типоразмеру шара 1 или нескольким типоразмерам, подлежащим контролю. По эталонному шару или нескольким шарам настраивают измерители 25. ..29 и блок 24 управления. Настраивают усилие прижима дисков 10, 11 к шару 1 подбором и регулировкой пружин 16. Устанавливают требуемое расположение загрузочного и разгрузочного отверстий 17 и 18. В емкость 2 засыпают партию шаров 1, подлежащих контролю. Включают блок 24 управления, приводы вращения первой опоры 4 и дисков 10, 11. По команде блока 24 управления отсекатель 3 открывается, шары 1 перемещаются по загрузочному отверстию 17 в рабочую зону 19. Шар 1 контактирует одновременно в точках а, б с поверхностями конусов первой опоры 4, где шару 1 сообщается скорость V1 вращения вокруг его центра 0ш, и в точках в, г контакта с поверхностями конусов дисков 10, 11, в которых ему сообщают скорости V2, V3 соответственно. В результате сложения скоростей V1, V2 и V3 шар 1 получает сложное вращательное движение вокруг своего центра 0ш, при котором, например, точка д его поверхности, подвергнутая контролю измерителем 25, описывает винтовую кривую - спираль. Каждая точка спирали находится в неповторяющемся радиальном сечении шара 1. Измерители 25. ..29 подают сигналы в блок 24 управления о величине контролируемого параметра шара 1, угла поворота первой опоры, скоростях вращения первой опоры, скоростях вращения дисков 10, 11 и угле поворота первой опоры. При необходимости коррекции траектории шара 1 подается сигнал на приводы дисков 10 и 11, производится изменение их угловой скорости вращения. После совпадения оси разгрузочного отверстия 18 с центром 0ш шара 1 шар 1 попадает по разгрузочному отверстию 18 в полость крана 21. По команде блока 24 управления в зависимости от результатов контроля кран 21 отсылает измеренный шар 1 в емкость 22 годных либо в емкость 23 негодных шаров. Срабатывает отсекатель 3, подавая очередной шар 1 из емкости 2 в зону 19.
Пример реализации. Подвергается контролю партия шаров диаметром 1/2 дюйма (12,7 мм) на наличие огранки. Допуск на огранку составляет 0,001 мм. Партию шаров засыпают в емкость 2. После включения привода первой опоры 4 и дисков 10, 11 второй опоры блок 24 управления дает команду отсекателю 3. Шар 1 попадает в рабочую зону 19 контроля. Шар 1 устанавливается одновременно между поверхностями конусов первой опоры 4 и дисков 10, 11. Шар 1 захватывается силами трения с указанными поверхностями и получает сложное вращательное движение вокруг своего центра 0ш. Точка измерителя описывает на поверхности шара, например, при наперед заданных заранее 25 оборотах шара сложную неповторяющуюся кривую, что позволяет контролировать его в неповторяющихся равномерно расположенных радиальных сечениях. Эти, например, 25 оборотов шар совершает за время поворота первой опоры 4 от загрузочного 17 до разгрузочного 18 отверстий. При подходе разгрузочного отверстия блок 24 управления заканчивает обработку информации о результатах контроля, на основе чего дается команда крану 21. Кран 21 открывает доступ в емкости 22 или 23 - в зависимости от годности шаров, куда и поступает проконтролированный шар 1.
Способ контроля шаров позволяет расширить технологические возможности, повысить точность и достоверность контроля.
Экономическая эффективность предложения определяется сравнением себестоимостей и цены контроля при предлагаемом способе контроля и способе-прототипе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1999 |
|
RU2190829C2 |
| СПОСОБ КОНТРОЛЯ ШАРОВ | 2000 |
|
RU2198377C2 |
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1992 |
|
RU2066841C1 |
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1991 |
|
RU2075723C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШАРОВ | 1990 |
|
RU2019784C1 |
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1990 |
|
RU2019786C1 |
| СПОСОБ КОНТРОЛЯ ОТКЛОНЕНИЙ ОТ ПЛОСКОСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2168150C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШАРОВ | 1992 |
|
RU2075724C1 |
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1990 |
|
RU2019785C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ВРАЩЕНИЯ ВАЛА | 2001 |
|
RU2203776C2 |
Изобретение относится к измерительной технике. Способ состоит в том, что подают шары в рабочую зону через загрузочное отверстие, устанавливают шары между двумя опорами, размещенными на корпусе. Первая опора выполнена в виде диска. Вторая опора выполнена в виде двух соосных, обратных друг другу конусов. Вращают опоры вокруг своих осей с разными скоростями. Измеряют при этом требуемые параметры шара в различных неповторяющихся сечениях, удаляют шары из рабочей зоны. Оси вращения опор выполнены перпендикулярными. Конусы второй опоры приводятся во вращение независимо друг от друга и сообщают шару разные скорости. Технический результат: повышение точности контроля. 4 ил.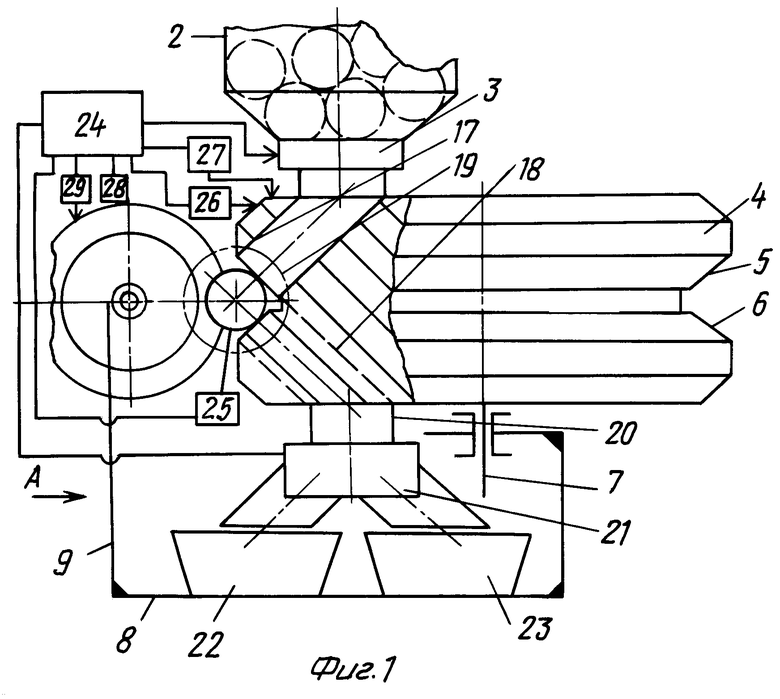
Способ контроля шаров, при котором шары подают в рабочую зону через загрузочное отверстие первой опоры, устанавливают шары между двумя опорами, размещенными на корпусе с базовой плоскостью основания, выполненными в виде двух соосных, обратных друг другу конусов, вращают опоры вокруг своих осей с разными по величине и направлению скоростями, измеряют при этом требуемые параметры шара в различных неповторяющихся сечениях, удаляют шары из рабочей зоны через смещенное относительно загрузочного разгрузочное отверстие первой опоры, задают форму, расположение и взаимную ориентацию пятен контакта шара с опорами, при этом размещают первую опору осью перпендикулярно базовой плоскости основания корпуса, располагают опоры осями вращения перпендикулярно друг другу, производят контроль шара за время поворота первой опоры на угол (360o - α), а подачу и удаление шара из нес - за время поворота на угол α, отличающийся тем, что вторую опору используют из двух самостоятельно приводимых во вращение, подпружиненных к шару конусов, а скорости вращения шара в точках пятен контакта его с конусами второй опоры выбирают разными.
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1992 |
|
RU2066841C1 |
| Способ контроля шаров | 1990 |
|
SU1837150A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШАРОВ | 1992 |
|
RU2075724C1 |
| СПОСОБ КОНТРОЛЯ ШАРОВ | 1990 |
|
RU2019786C1 |

