Изобретение относится к области измерительной техники и может быть использовано в различных областях промышленности для определения скорости вращения вала, например в автомобилестроении.
Известен цифровой датчик скорости вращения, который содержит вращающийся диск с постоянными магнитами, на некотором расстоянии от диска размещены чувствительные импульсные проволочные элементы в неподвижной кассете (1).
Конструкция датчика позволяет изменять расстояние между кассетой и вращающимся диском, что дает возможность осуществлять регулировку выходных параметров датчика.
Недостатком такого датчика является сложность конструкции, ненадежность из-за наличия множества элементов, изменение чувствительности датчика после смещения кассеты к вращающемуся диску.
Известен датчик частоты вращения, который содержит кольцевой многополюсный магнит на приводном валу с радиально-намагниченными разнополярными зонами, компаратор магнитной индукции с чувствительным к изменениям магнитного поля элементом, расположенным над внешней цилиндрической поверхностью многополюсного магнита, и концентратор магнитной индукции, выполненный в виде изогнутой пластины, у которого одна часть пластины расположена над чувствительным элементом, а другая охватывает вал. Для смещения магнитного поля в области чувствительного элемента используется многополюсный магнит с различной азимутальной шириной намагничивания полюсных поверхностей разной полярности (2).
Недостатком данного устройства является следующее:
неизменные размеры концентратора не позволяют изменять величину индукции магнитного поля в области чувствительного элемента, при регулировании параметров выходного сигнала;
использование многополюсного магнита с различной азимутальной шириной полюсных поверхностей приводит к увеличению габаритных размеров магнита, либо к применению материалов с более высокими магнитными свойствами, а значит более дорогих, что приводит к увеличению стоимости датчика.
В основу настоящего изобретения, положена задача обеспечить регулировку параметров выходного сигнала, при этом чувствительность датчика не должна изменяться, уменьшить габариты датчика и его стоимость.
Указанная задача решается тем, что над чувствительным к изменениям магнитного поля элементом помещен малогабаритный постоянный магнит, ориентированный таким образом, что один полюс его расположен в области чувствительного элемента.
Указанная задача решается тем, что постоянный магнит имеет возможность перемещаться относительно чувствительного элемента, а также вращаться вокруг своей оси симметрии параллельно чувствительному элементу, меняя полярность полюса в области чувствительного элемента.
Технический результат, который может быть получен при осуществлении изобретения, заключается в том, что предложенная конструкция позволяет:
создать с помощью постоянного магнита в области чувствительного элемента поле смещения, а для компенсации технологических разбросов намагниченности полюсов многополюсного магнита и разбросов порогов срабатывания и отпускания компаратора магнитной индукции, увеличивать или уменьшать (регулировать) величину магнитной индукции указанного поля, изменяя расстояние между постоянным магнитом и чувствительным элементом и(или) вращая постоянный магнит вокруг своей оси симметрии, при этом чувствительность датчика остается неизменной ввиду неизменности расстояния от чувствительного элемента до многополюсного магнита;
использовать постоянный магнит небольших размеров с невысокими магнитными свойствами и при этом получать магнитное поле смещения достаточно большой величины в связи с тем, что расстояние между постоянным магнитом и чувствительным элементом мало;
использовать кольцевой многополюсный магнит с одинаковой азимутальной шириной и намагниченностью полюсных поверхностей разной полярности в связи с тем, что смещение индукции магнитного поля в области чувствительного элемента обеспечивает постоянный магнит;
обеспечить в области чувствительного элемента с помощью поля, которое создает постоянный магнит, регулируемое смещение переменного магнитного поля многополюсного магнита;
позволяет проводить регулировку параметров выходного сигнала в широком диапазоне, в том числе для компараторов с различной величиной и разбросом порогов срабатывания и отпускания, полностью скомпенсировать значительные технологические разбросы намагниченности многополюсного магнита за счет регулируемого смещения переменного магнитного поля;
использовать постоянный магнит небольших размеров с невысокими магнитными свойствами и при этом получать поле смещения достаточно большой величины в связи с тем, что расстояние между постоянным магнитом и чувствительным элементом мало;
использовать многополюсный магнит, выполненный в форме кольца, с одинаковой азимутальной шириной и радиальной намагниченностью полюсных поверхностей разной полярности в связи с тем, что смещение индукции магнитного поля в области чувствительного элемента обеспечивает постоянный магнит;
уменьшить габариты многополюсного магнита, использовать при изготовлении более дешевые магнитотвердые материалы, в связи с тем, что величину намагниченности полюсов при наличии поля смешения можно уменьшить;
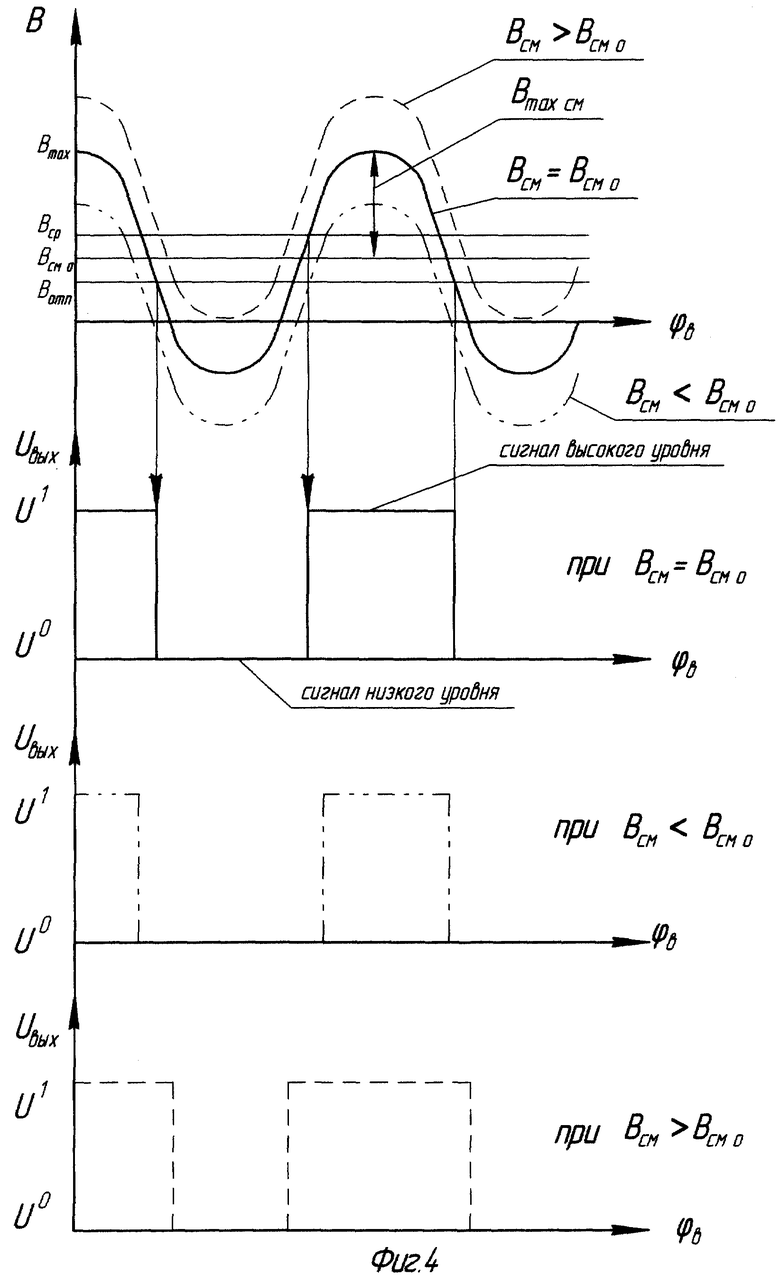
на фиг. 4 - зависимость рабочей индукции переменного магнитного поля в области чувствительного элемента от угла поворота приводного вала и диаграмма формирования сигнала на выходе компаратора, где
Вр - рабочая индукция переменного магнитного поля;
Всм - индукция регулируемого постоянного магнитного поля смещения, которое создает постоянный магнит;
Вср и Вотп - пороги срабатывания и отпускания компаратора магнитной индукции;
Bmax - максимальная величина индукции магнитного поля, которое создает многополюсный магнит без постоянного магнита;
Bmax см - максимальная величина индукции магнитного поля, которое создает многополюсный магнит с постоянным магнитом.
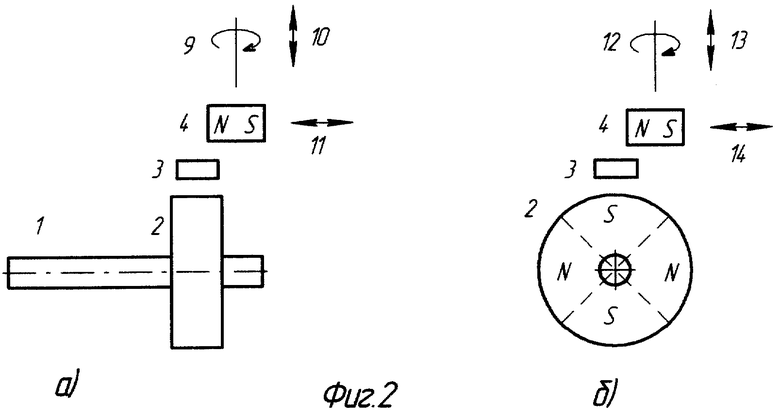
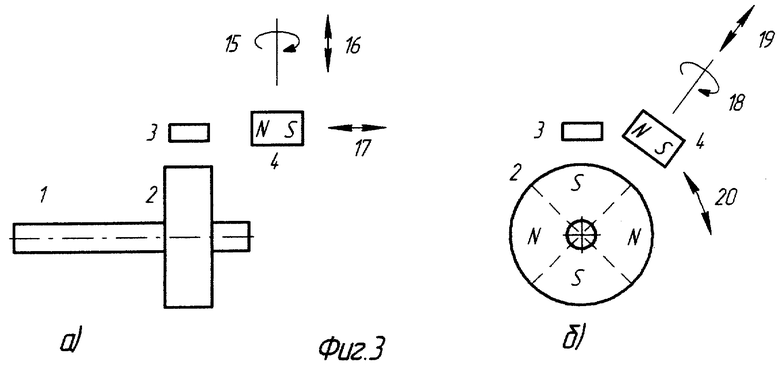
На фиг.1-3 цифрами 5-20 показаны направления возможных перемещений постоянного магнита при регулировании величины магнитной индукции Всм.
Датчик скорости вращения содержит магнитную цепь, включающую кольцевой многополюсный магнит 2, расположенный на приводном валу 1, компаратор магнитной индукции с чувствительным Bmax cм - максимальная величина индукции магнитного поля, которое должен создавать многополюсный магнит в случае применения постоянного магнита.
U1 и U0 - сигналы высокого и низкого уровня на выходе датчика.
На фиг.1-3 цифрами 5-20 показаны направления возможных перемещений постоянного магнита при регулировании параметров выходного сигнала.
Датчик скорости вращения содержит магнитную цепь, включающую многополюсный магнит 2, расположенный на валу 1, компаратор магнитной индукции с чувствительным элементом 3 и постоянный магнит 4.
Магнит 2 выполнен в виде кольца из магнитотвердого материала с одинаковой азимутальной шириной и радиальной намагниченностью полюсных поверхностей разной полярности с внешней цилиндрической поверхностью, у которой расположен чувствительный элемент.
Постоянный магнит расположен в области чувствительного элемента, над чувствительным элементом или у его боковой поверхности.
Постоянный магнит 4, при уменьшении размеров датчика в радиальном направлении, может быть размещен непосредственно у боковой поверхности чувствительного элемента.
Датчик работает следующим образом. При вращении многополюсного магнита в области чувствительного элемента 3 появляется переменное магнитное поле. При превышении индукцией В~ переменного магнитного поля вокруг своей оси симметрии (направления 5-20 возможных перемещений постоянного магнита при изменении величины Всм показаны на фиг.1-3), при этом рабочее (результирующее) магнитное поле может быть представлено как
Вр=В~+Всм
где Вр - индукция рабочего магнитного поля;
В~ - индукция переменного магнитного поля, которое создает многополюсный магнит;
Всм - индукция магнитного поля смещения, которое создает постоянный магнит.
Источники информации
1. Патент США 4890059, МПК4: G 01 Р 3/42, НКИ 324-174, публ. 26.12.89.
2. Патент РФ 2136003, МПК6: G 01 Р 3/487, публ. 27.08.99.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ПОЛОЖЕНИЯ ФЕРРОМАГНИТНОГО ЭЛЕМЕНТА | 2003 |
|
RU2265226C2 |
| ЭЛЕКТРОМАГНИТНЫЙ КЛАПАН | 2000 |
|
RU2196929C2 |
| ДАТЧИК ПОЛОЖЕНИЯ КОЛЕНЧАТОГО ВАЛА ДВИГАТЕЛЯ | 1996 |
|
RU2142641C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДАТЧИКА КРИТИЧЕСКОГО УРОВНЯ ТОКОПРОВОДЯЩИХ МАТЕРИАЛОВ | 2001 |
|
RU2210063C2 |
| СПОСОБ НАСТРОЙКИ РЕГУЛЯТОРА ДАВЛЕНИЯ ТОПЛИВА | 1999 |
|
RU2161726C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ ТОПЛИВА | 2001 |
|
RU2208697C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДАТЧИКА КРИТИЧЕСКОГО УРОВНЯ | 2004 |
|
RU2267093C1 |
| МУФТА ЦЕНТРОБЕЖНАЯ | 2005 |
|
RU2288382C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ ТОПЛИВА | 2004 |
|
RU2270358C1 |
| ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ | 1997 |
|
RU2136003C1 |
Датчик предназначен для использования в различных областях промышленности, например в автомобилестроении. Датчик содержит кольцевой многополюсный магнит, расположенный на приводном валу, компаратор магнитной индукции с чувствительным к изменениям магнитного поля элементом, расположенным у внешней цилиндрической поверхности многополюсного магнита, и постоянный магнит, расположенный в области чувствительного элемента, который позволяет производить регулировку параметров выходного сигнала датчика изменением величины индукции постоянного магнитного поля смещения в области чувствительного элемента перемещением постоянного магнита и/или его вращением вокруг своей оси. 3 з.п. ф-лы, 4 ил.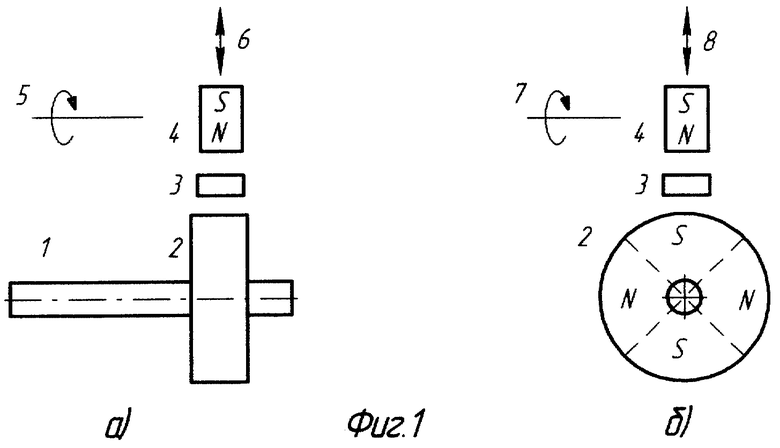
| DE 3939939 A1, 06.06.1991 | |||
| ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ | 1997 |
|
RU2136003C1 |
| Датчик частоты вращения | 1989 |
|
SU1689859A1 |
| DE 3209307 A1, 15.09.1983 | |||
| СПОСОБ МОНТАЖА КОЛЕСА ОБОЗРЕНИЯ | 1999 |
|
RU2168344C1 |

