Изобретение относится к кибернетическим системам и может быть использовано для моделирования всех аспектов творческой интеллектуальной деятельности человека.
В самом общем смысле искусственный интеллект - это совокупность компьютерно-ориентированных алгоритмов и программ, обеспечивающих целенаправленную переработку информации (знаний) в соответствии с приобретаемым в процессе обучения и адаптации опытом при решении разнообразных интеллектуальных задач.
Известны два метода создания интеллектуальных систем (ИС): модели понимания (МП) и нейронная кибернетика (НК).
Эти методы можно описать выражением
ϕ = {ϕ′:ϕ″,
где вырабатываемые ИС ϕ знания (действия), составляющие множество, куда входят ϕ′ знания о необходимых действиях на внешнюю среду и ϕ″ знания о цели этих действий, F[•] программа работы ИС.
Способ (МП) используется во всех ЭВМ Тьюринга-Неймана и соответствует явной форме выражения. Метод НК используется в нейрокомпьютерах (транспьютерах) и соответствует некоторой неявной форме выражения.
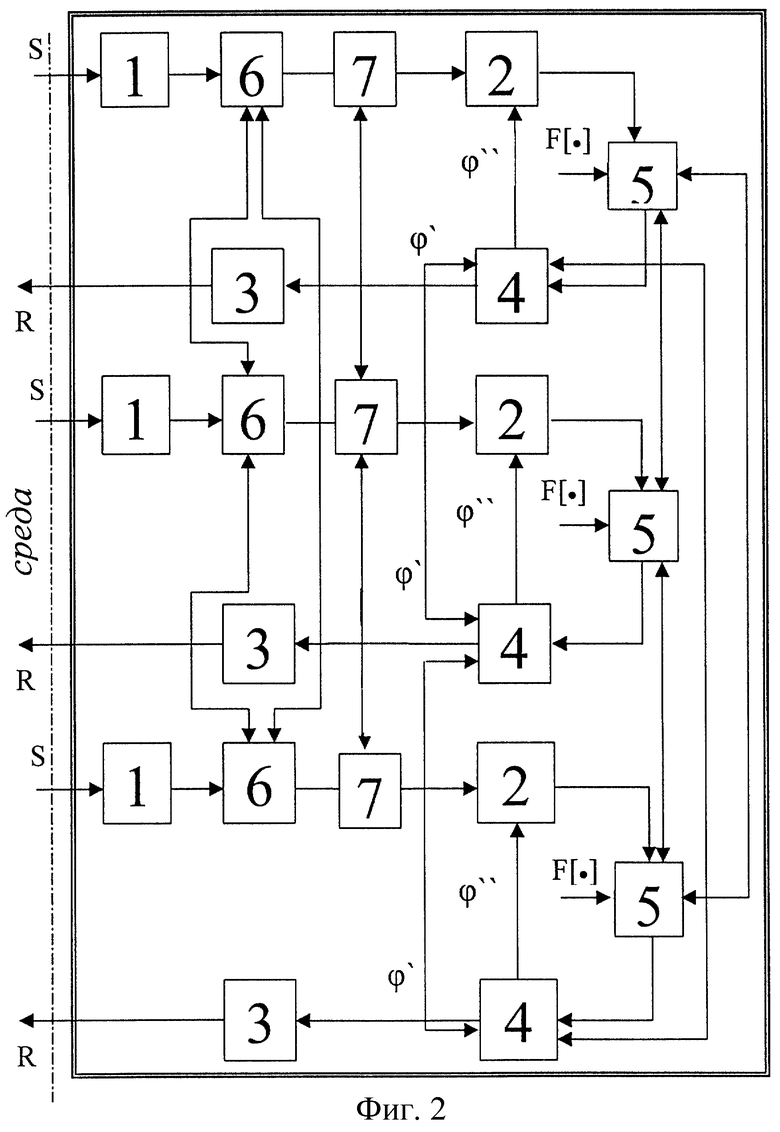
Структурная схема устройства (ячейка искусственного интеллекта), реализующего данные методы, представлена на фиг.1, где 1 - рецептор, преобразующий сигнал S внешней среды во внутренний язык ИС, 2 - сопоставитель, 3 - устройства, выполняющее функцию преобразования знаний с внутреннего языка ИС в действия R, 4 - блок постоянной памяти, 5 - устройство, управляющее выбором знаний (действий) из блока постоянной памяти.
Это устройство работает по заранее заданной программе и не предполагает осуществление процесса моделирования творческой интеллектуальной деятельности человека, так как невозможно полностью предсказать поведение внешней среды.
Предлагаемая система для моделирования творческой интеллектуальной деятельности человека (фиг. 2) содержит три идентичные взаимосвязанные ячейки искусственного интеллекта, аналогичные вышеописанной ячейке (фиг.1), и отличается тем, что в каждую из трех ячеек дополнительно введены два последовательно соединенных устройства 6 и 7. Устройство 6, вход которого соединен с выходом рецептора, выполняющее функции восприятия материализованного изображения об объектах реального мира (МИООРМ), материализации координатной сетки (КС), имеющей равное и четное количество рядов по горизонтали и вертикали, каждому квадрату координатной сетки присваивается, начиная с нижнего горизонтального ряда, слева направо, порядковый номер, определяющий его значения, а также функцию фиксирования МИООРМ на материализованной КС, где одна точка изображения - один квадрат. Устройство 7, выход которого соединен с входом сопоставителя, выполняющее функцию восприятия информации о материализованной координатной сетке (МКС) с зафиксированным на ней МИООРМ; а также функцию материализации процесса перехода МКС вместе с зафиксированным на ней МИООРМ из двухмерного измерения в Z-измерение согласно алгоритму Z таким образом, что в результате имеет Z-MKC с соответственно видоизмененным МИООРМ на ней, которая имеет идентичное с исходной количество рядов по горизонтали и вертикали, где квадраты переместились, сохраняя свое значение, таким образом, что разность сумм значений квадратов первого слева вертикального ряда и первого снизу горизонтального ряда равна разности сумм значений квадратов последнего снизу горизонтального ряда и последнего слева вертикального ряда. Это соотношение разностей сумм значений квадратов соблюдается для аналогичных и равноудаленных от середины координатной сетки рядов. Суммы значений квадратов по диагоналям идентичны. Функцию передачи информации в сопоставитель.
Система обеспечивает МТИДЧ только при наличии устройств 6 и 7.
Мысль о том, что Z-измерение возникло при рассмотрении группы религиозных символов, при определенном варианте соединения которых возникает четкое представление о том, как создавать структуру пространства, имеющего Z-измерение.
Один из символов общеизвестен. Это китайский символ двойственного распределения сил, включающий активный символ (принцип Ян) и пассивный (принцип Инь), имеет форму круга, разделенного надвое линией, напоминающей по форме сигму или змею, образованные таким образом две части приобретают динамическую тенденцию. Сам круг как целое обозначает Дао, Абсолют, на котором покоится изменчивое множество. Дао - всеохватывающий принцип, производящий все вещи. Это также диалектический символ взаимоотражения противоположностей (рефлексия).
Рассмотрение процесса взаимодействия объектов в Z-измерении позволяет строго формализовать необходимую стратегическую цель взаимодействия. Это можно представить как обнаружение Полярной звезды, которая служит ориентиром для капитана корабля, определяющего кратчайший путь до порта.
Возможность кардинальным образом сократить объем поиска решения в крупных пространствах решений путем формализации стратегической задачи подтверждается на практике, например, в игре в шахматы (фиг.3), что сводит игру в шахматы к простым вычислениям и позволяет найти ход, обеспечивающий выигрыш независимо от реакции противника. При этом анализируются только потенциальные ходы (около 20 в середине игры), все возможные варианты, вытекающие из потенциальных ходов (около 1040), нет необходимости рассматривать.
Система для МТИДЧ (фиг.2) содержит три идентичные ячейки искусственного интеллекта. Ячейка содержит последовательно соединенные 1 рецептор, вход которого является входом в систему, выход рецептора 1 соединен с входом устройства 6, вход которого соединен с выходом рецептора, выполняющее функции восприятия МИООРМ, материализации КС, имеющей равное и четное количество рядов по горизонтали и вертикали, каждому квадрату координатной сетки присваивается, начиная с нижнего горизонтального ряда, слева направо, порядковый номер, определяющий его значения, а также функцию фиксирования МИООРМ на МКС, где одна точка изображения - один квадрат. Устройство 7, выход которого соединен с входом сопоставителя, выполняющее функцию восприятия информации о МКС с зафиксированным на ней МИООРМ; а также функцию материализации процесса перехода МКС вместе с зафиксированным на ней МИООРМ из двухмерного измерения в Z-измерение согласно алгоритму Z таким образом, что в результате имеет Z-MKC с соответственно видоизмененным МИООРМ на ней, которая имеет идентичное с исходной количество рядов по горизонтали и вертикали, где квадраты переместились, сохраняя свое значение, таким образом, что разность сумм значений квадратов первого слева вертикального ряда и первого снизу горизонтального ряда равна разности сумм значений квадратов последнего снизу горизонтального ряда и последнего слева вертикального ряда. Также равны разности сумм значений квадратов остальных аналогичных пар рядов, равноудаленных от середины координатной сетки. Суммы значений квадратов по диагоналям идентичны. Функция передачи информации в сопоставитель, выход устройства 7 соединен с входом сопоставителя, который есть коррелятор, выход которого соединен с входом устройства 5, выполняющего функцию управления выбором знаний (действий), выход которого соединен с входом блока памяти 4, выход блока памяти соединен с входом устройства, выполняющего функцию преобразования знаний (действий) с внутреннего языка ИС в действия. Блоки 4 постоянной памяти, устройства 6, 7, 5 в трех ячейках соединены между собой двусторонней связью (фиг.2). Второй выход блока памяти 4 соединен со вторым входом сопоставителя.
Работает устройство следующим образом: все три ячейки работают параллельно в режиме реального времени. Ячейка Б дублирует все операции ячейки А, а ячейка В дублирует все операции ячейки Б.
По сути, принципиальное отличие ячеек друг от друга в том, что каждой ячейкой выполняется свой определенный блок стратегических задач. В непосредственный контакт с окружающей средой через двигательную систему вступает ячейка А, которая осуществляет управление объектом в процессе его взаимодействия с объектами окружающей среды.
Работа ячейки А: Полученное рецептором изображение управляемого объекта в процессе взаимодействия с объектами окружающей среды поступает методом квантования в устройство б, выполняющее функции восприятия МИООРМ, материализации КС и фиксации МИООРМ на МКС, далее информация поступает в устройство 7, выполняющее функции восприятия информации из устройства 6, материализации процесса перехода МКС с зафиксированным на ней МИООРМ из двухмерного измерения в Z-измерение согласно алгоритму Z, а также функцию передачи информации в сопоставитель, где информация о Z-MKC с зафиксированным на ней МИООРМ просчитывается на соответствие числовому критерию, определяющему стратегическую задачу идентификации объектов, который по команде устройства 5 поступает из блока памяти 4 в сопоставитель 2 с момента начала работы ИС.
Результат вычислений используется устройством 5 для идентификации объектов. После идентификации объектов устройство 5 выбирает числовой критерий необходимой стратегической цели взаимодействия из блока памяти 4, и он поступает в сопоставитель 2, после чего происходит обработка изображения и полученный результат сравнивается с числовым критерием. Если соответствие не наблюдается, то по команде устройств 5 идет выбор знаний (действий) в блоке 4 и находится один вариант изменения ситуации за единицу времени за счет изменения состояния системы, который после осуществления изменит ситуацию таким образом, что она будет соответствовать числовому критерию, определяющему стратегическую цель взаимодействия. Далее полученный вариант поступает в устройство 3, преобразующее знания (действия) с внутреннего языка ИС в действия, и реализуется через блок управления механизмами двигательной системы.
Ячейка Б содержит блок стратегических задач, как то: обобщение информации, постановка и реализация творческих задач, генерация идей и гипотез в процессе решения, интуитивный синтез сюжетов и сценариев, а также корректировку числовых критериев, определяющий стратегическую цель взаимодействия. Ячейка Б вмешивается в работу ячейки А после разрешения, полученного ячейкой В.
Ячейка В не только осуществляет адаптацию совместной работы ячеек А и Б в области взаимной увязки вырабатываемых ими знаний, но и адаптацию самих алгоритмов работы этих ячеек. Ячейка В имеет систему связи с человеком.
Все входящие в систему элементы ординарны, их реализация не представляет особых трудностей.
Рецептор 1, входящий в систему для МТИДЧ, содержит последовательно соединенные преобразователь одного вида сигналов в другой, декодер или транскодер. В зависимости от назначения системы для МТИДЧ и вида необходимых сигналов порядок следования перечисленных блоков может меняться. Устройство 3 имеет обратную структуру и последовательность действий. Сопоставитель 2 практически представляет собой коррелятор, производящий вычисления по формуле, реализуется программно на ЭВМ.
Так как оптическое наблюдение обеспечивает большую информативность, роль рецептора могут выполнять следующие устройства: кадровые и панорамные аэрофотоаппараты, телевизионные и инфракрасные системы. Устройство 6 может быть реализовано в виде массива фотоэлементов (один элемент - один квадрат координатной сетки), который управляется программно на ЭВМ. Устройство 5 реализуется программно на ЭВМ. Устройство 7 реализуется в виде активно-матричного дисплея, управляемого программно на ЭВМ.
Программы для устройства 6, 7 создаются на основе алгоритма Z.
Заявленная система для МТИДЧ обладает новизной, так как при проведении поиска по источникам патентной и научно-технической информации заявителем не выявлено техническое решение, в котором бы система была снабжена тремя идентичными ячейками искусственного интеллекта, содержащими последовательно соединенные рецептор, вход которого является входом в систему, при этом в каждую из ячеек были введены устройства 6 и 7. Устройство 6, вход которого соединен с выходом рецептора, выполняющее функции восприятия материализованного изображения об объектах реального мира, материализации координатной сетки, имеющей равное и четное количество рядов по горизонтали и вертикали, каждому квадрату координатной сетки присваивается, начиная с нижнего горизонтального ряда, слева направо, порядковый номер, определяющий его значения, а также функцию фиксирования материализованного изображения об объектах реального мира на материализованной координатной сетке, где одна точка изображения - один квадрат. Устройство 7, выход которого соединен с входом сопоставителя, выполняющее функцию восприятия информации о материализованной координатной сетке с зафиксированным на ней материализованным изображением об объектах реального мира и функцию передачи информации в сопоставитель; а также функцию материализации процесса перехода МКС вместе с зафиксированным на ней МИООРМ из двухмерного измерения в Z-измеренне согласно алгоритму Z таким образом, что в результате имеет видоизмененную МКС с соответственно видоизмененным МИООРМ на ней, которая имеет идентичное с исходной количество рядов по горизонтали и вертикали, где квадраты переместились, сохраняя свое значение, таким образом, что разность сумм значений квадратов первого слева вертикального ряда и первого снизу горизонтального ряда равна разности сумм значений квадратов последнего снизу горизонтального ряда и последнего слева вертикального ряда. Также равны разности сумм значений квадратов остальных аналогичных пар рядов, равноудаленных от середины координатной сетки. Суммы значений квадратов по диагоналям идентичны. Выход устройства 7 соединен с входом сопоставителя, который есть коррелятор, выход которого соединен с входом устройства 5, выполняющего функцию управления выбором знании (действий), выход которого соединен с входом блока памяти 4, выход блока памяти соединен с входом устройства, выполняющего функцию преобразования знаний (действий) с внутреннего языка ИС в действия. Блоки 4 постоянной памяти, устройства 6, 7, 5 в трех ячейках соединены между собой двусторонней связью (фиг. 2). Второй выход блока памяти 4 соединен со вторым входом сопоставителя.
Заявленная система для МТИДЧ широко применима в информационных кибернетических технологиях. Следовательно, предлагаемое техническое решение соответствует критерию "промышленная применимость".
Сущность заявленной системы для моделирования творческой интеллектуальной деятельности человека:
На фигуре 1 представлена ячейка искусственного интеллекта, выбранная в качестве прототипа.
На фигуре 2 представлена предлагаемая система для моделирования творческой интеллектуальной деятельности человека.
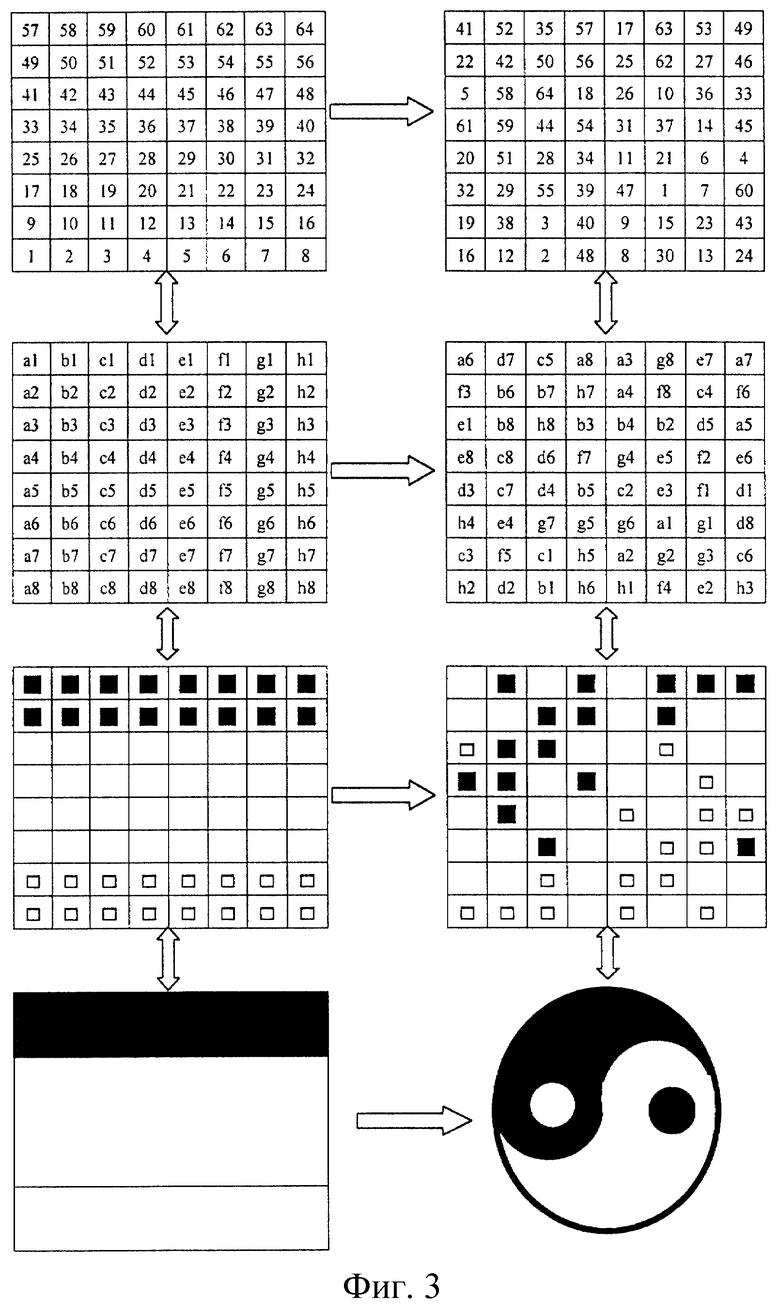
На фигуре 3 схематически представлен процесс перехода из двухмерного измерения в Z-измерение.
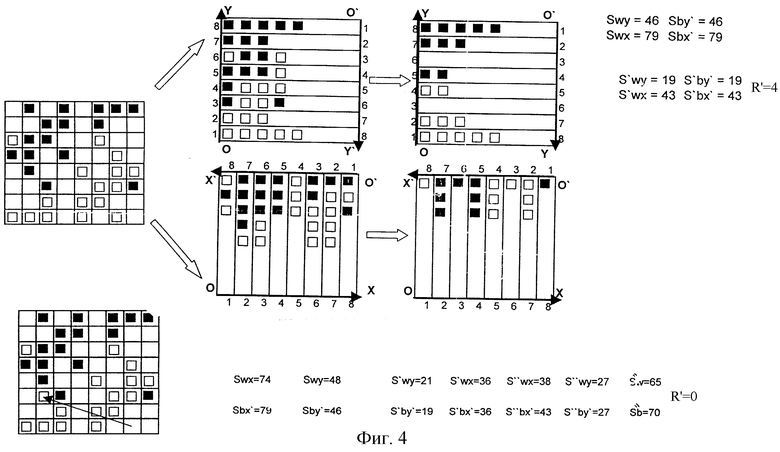
На фигуре 4 схематически представлен поиск решения по предлагаемой системе в приложении к шахматной игре.
Алгоритм Z:
Процесс перехода из двухмерного измерения в Z-измерение осуществляется координатным способом. Материализованное изображение ситуации на текущий момент в процессе взаимодействия объектов фиксируется на координатной сетке (объект как группировка точек, точка-квадрат). После этого координатная сетка переходит из двухмерного измерения в Z-измерение, в результате получаем Z-координатную сетку с видоизмененным изображением. Затем устанавливается связь между точкой-квадратом и числами при помощи системы координат. Значения координат точек-квадратов обрабатываются по алгоритму. Результат обработки проверяется на соответствие числовому критерию, который выражает стратегическую цель управления.
Если результат не соответствует критерию, то аналогично обрабатываются все потенциально возможные варианты изменения ситуации, происходящие за счет изменения параметров управляемого объекта за единицу времени. Полученные результаты проверяются на соответствие критерию и определяем единственный вариант изменения ситуации, обеспечивающий достижение цели независимо от дальнейшего развития событий.
Процесс перехода из двухмерного измерения в Z-измерение включает в себя следующие операции:
1. Построение координатной сетки (фиг.3).
1.1. Размещаем на плоскости координатную сетку, имеющую равное и четное количество рядов по вертикали и по горизонтали (8•8, 100•100). Количество рядов не ограничено.
1.2. Присваиваем каждому квадрату координатной сетки порядковый номер, начиная с нижнего ряда, слева направо (10•10: 1, 2, 3.....99, 100). Порядковый номер квадрата определяет его значение.
1.3. Материализованное изображение, например, двух взаимодействующих объектов (двух групп объектов, "я" как объект и "мир" как группа объектов), один из которых управляется, фиксируется на координатной сетке. Объект как группировка точек-квадратов.
1.4. Осуществляется переход координатной сетки из двухмерного измерения в Z-измерение. В результате получается Z-координатная сетка с видоизмененным изображением объектов. Z-координатная сетка имеет идентичное с исходной количество рядов по горизонтали и по вертикали, где квадраты переместились, сохраняя свое значение, таким образом, что разность сумм значений квадратов первого слева вертикального ряда и первого снизу горизонтального ряда равна разности сумм значений квадратов последнего снизу горизонтального ряда и последнего слева вертикального ряда. Это соотношение можно выразить в формуле
где RV - ряд по вертикали;
Rh - ряд по горизонтали;
N - число, обозначающее количество рядов по вертикали или по горизонтали;
n - число, обозначающее номер ряда по вертикали и горизонтали (снизу вверх, слева направо).
Суммы значений квадратов по диагоналям идентичны.
1.5. Обозначаем системы координат для каждого объекта отдельно. В качестве примера использования алгоритм обработки выполнен на уровне постановки и решения неопределенной задачи с полной информацией: нахождение хода в игре в шахматы, обеспечивающего выигрыш при любой реакции противника.
для белых фигур - OXY;
для черных фигур - O'X'Y' (фиг.4).
1.6. Находим суммы значений координат белых фигур по горизонтали и по вертикали (отдельно) в системе OXY, аналогично для черных фигур в системе O'X'Y'. Получаем соответственно 4 значения: Sbx', Sby', Swx, Swy.
1.7. Сокращаем любые парные черные и белые фигуры, расположенные на одной горизонтали. Затем находим суммы значений оставшихся фигур и получаем для белых Swx; для черных S'bx'. Аналогично по вертикали: Swy; S'by'.
1.8. Находим соответствующие разности:
S"wx=Swx - S'wx;
S"wy=Swy - S'wy;
S"bx'=Sbx' - S'bx';
S"by'=Sby' - S'by'.
Затем находим суммы
S"b=S"bx' + S"by';
S''w=S"wx + S"wy.
После этого находим остаток, полученный от деления S"b и S"w на 8 и получаем R"= R"b + R"w, если R" > 8, то находим остаток от деления R" на 8 и получаем окончательное значение R".
Аналогично находим: суммы
Sw и Sb и остаток R;
S'w и S'b и остаток R'.
1.9. Единственно лучший потенциальный ход соответствует трем условиям:
1.9.1. 8 - R'=8, или стремится к 0 (аналогично для R").
1.9.2. Sw-min, S'b-max (для черных).
1.9.3. S'w-max, Sb-min (для белых).
1.9.4. R=R'+R". Конец.
Можно говорить о том, что найдена прямая и непосредственная связь между шахматами и символом Дао. Доказательством этому служит вышеописанный алгоритм Z. Использование алгоритма Z практически сводит игру в шахматы к простым вычислениям и позволяет найти ход, обеспечивающий выигрыш независимо от реакции противника. При этом анализируются только потенциальные ходы (около 20 в середине игры), все возможные варианты, вытекающие из потенциальных ходов (1040), нет необходимости рассматривать.
Изобретение относится к области кибернетики и может быть использовано для моделирования искусственного интеллекта. Техническим результатом является расширение класса решаемых задач. Функционирование системы основано на использовании ячеек искусственного интеллекта, при этом система содержит рецептор, сопоставитель, устройство управления выбора знаний, блок постоянной памяти, устройство преобразования знаний с внутреннего языка системы в действия, восприятия материализованного изображения об объектах реального мира и материализации координатной сетки, где одна точка изображения - один квадрат. 4 ил.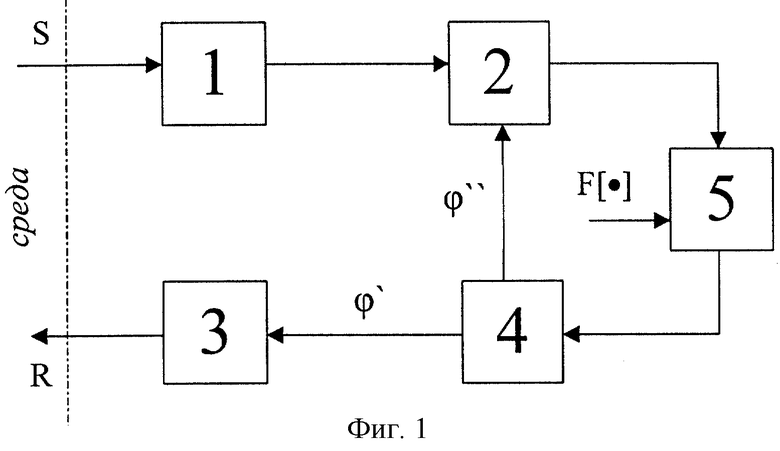
Система для моделирования творческой интеллектуальной деятельности человека, содержащая ячейку искусственного интеллекта, состоящую из последовательно соединенных рецептора, сопоставителя, устройства управления выбора знаний, блока постоянной памяти, а также устройства, выполняющего функцию преобразования знаний с внутреннего языка системы в действия, где выход блока памяти соединен с входом сопоставителя, отличающаяся тем, что дополнительно введены две идентичные ячейки искусственного интеллекта, в каждую из трех ячеек введены два последовательно соединенных устройства: устройство, выполняющее функцию восприятия материализованного изображения об объектах реального мира, материализации координатной сетки, имеющей равное и четное количество рядов по горизонтали и вертикали, где каждому квадрату, начиная с нижнего горизонтального ряда слева направо, присваивается порядковый номер, определяющий его значение, а также функцию фиксирования материализованного изображения об объектах реального мира на материализованной координатной сетке, где одна точка изображения - один квадрат координатной сетки, вход которого соединен с выходом рецептора, выход которого соединен с входом сопоставителя, выполняющее функцию восприятия информации о материализованной координатной сетке с зафиксированным на ней материализованным изображением об объектах реального мира, а также функцию материализации процесса перехода материализованной координатной сетки вместе с зафиксированным на ней материализованным изображением об объектах реального мира из двухмерного измерения в Z-измерение согласно алгоритму Z, результатом чего является Z-материализованная координатная сетка с соответственно видоизмененным материализованным изображением об объектах реального мира на ней, которая имеет идентичное с исходной, количество рядов по горизонтали и вертикали, где все квадраты Z-материализованной координатной сетки переместились, сохраняя свое значение, таким образом, что разность сумм значений квадратов первого слева вертикального ряда и первого снизу горизонтального ряда равна разности сумм значений квадратов последнего снизу горизонтального ряда и последнего слева вертикального ряда, а также равны разности сумм значений квадратов остальных аналогичных пар рядов, равноудаленных от середины координатной сетки, суммы значений квадратов по диагонали материализованной координатной сетки идентичны, устройства в трех ячейках, выполняющие функции восприятия материализованного изображения об объектах реального мира, материализации координатной сетки и фиксирования на ней материализованного изображения об объектах реального мира, выполняющие функции восприятия информации о материализованной координатной сетке с зафиксированным на ней материализованным изображением об объектах реального мира, материализации процесса перехода материализованной координатной сетки с зафиксированным на ней материализованным изображением об объектах реального мира из двумерного измерения в Z-измерение согласно алгоритму Z, устройства, управляющие выбором знаний, а также блоки памяти соединены между собой двусторонней связью.
| СПОСОБ УПРАВЛЕНИЯ МАССИВОМ ЭЛЕМЕНТОВ, УСТРОЙСТВО ДЛЯ ИГРЫ, СТРАТЕГИЧЕСКАЯ КОМПЬЮТЕРНАЯ ИГРА И СПОСОБЫ ЕЕ ПРЕДСТАВЛЕНИЯ ИГРОКУ | 1993 |
|
RU2099782C1 |
| US 5098106 A, 24.03.1992 | |||
| US 5228699 A, 20.07.1993. | |||

