Изобретение относится к области приборостроения и может быть использовано при создании инерциальных систем управления для определения навигационных параметров управляемых подвижных объектов с помощью бесплатформенной инерциальной навигационной системы (БИНС).
Известен способ (описанный в патенте №2279635, приоритет от 02.11.2004, принятый нами за прототип) определения начальной выставки приборной системы координат бесплатформенного инерциального блока (БИБ) управляемого объекта, установленного на пусковой установке (ПУ), относительно базовой (стартовой) системы координат, материализованной стабилизированной платформой курсовертикали (KB), также установленной на ПУ. Начальная выставка осуществляется комбинированным способом, использующим автономное определение положения приборной системы координат относительно плоскости горизонта стартовой системы координат по сигналам акселерометров БИБ и метод векторного согласования систем координат для определения положения приборной системы координат в азимуте. Для векторного согласования используется информация чувствительных элементов БИБ и информация прибора типа курсовертикаль.
Путем соответствующих программных разворотов ПУ можно сформировать несколько неколлинеарных векторов разворота ПУ и несколько неколлинеарных векторов приращений кажущейся скорости и определить их проекции на оси приборной и связанной систем координат. Любое сочетание пар из этого набора векторов позволяет однозначно определить начальную выставку приборной системы координат относительно базовой. Недостатком прототипа является необходимость обеспечения жесткости конструкции между корпусом курсовертикали и корпусом БИБ и сохранение неподвижности БИБ относительно Земли при определении начальной выставки.
В настоящее время акселерометры БИБ имеют существенно лучшие точностные характеристики по сравнению с датчиками угловой скорости, и применение акселерометров для определения начальной выставки является предпочтительным.
Опыт показывает, что обеспечение неподвижности БИБ относительно Земли в условиях эксплуатации, когда начальная выставка определяется при нахождении изделия на пусковой установке перед началом работы БИНС, является сложной технической задачей. В условиях подвижности БИБ снижается точность определения начальной выставки.
Целью предлагаемого изобретения является существенное снижение требований к неподвижности БИБ относительно Земли во время проведения измерений, результаты которых используются для определения начальной выставки, и повышение точности определения начальной выставки по сравнению с прототипом при одинаковых точностных характеристиках чувствительных элементов.
Сущность заявленного изобретения заключается в том, что в способе определения начальной выставки бесплатформенного инерциального блока (БИБ) управляемого объекта относительно базовой системы координат (БСК), материализованной стабилизированной платформой курсовертикали, установленной на пусковой установке, заключающегося в том, что осуществляют разворот пусковой установки с БИБ и выставку ее на первые заданные углы возвышения и азимута; проводят измерения акселерометрами БИБ в малоподвижном относительно Земли положении пусковой установки на интервале времени от t0 до tn; определяют в вычислительном устройстве (ВУ) n приращений каждой из проекций вектора кажущейся скорости (ВКС) на оси приборной системы координат (ПСК) за известные заданные интервалы времени от t0 до tj (j=1,...,n) и получают проекции ВКС на оси ПСК; проводят оценку каждой полученной проекции ВКС на оси ПСК и рассчитывают оценку каждой проекции вектора кажущегося ускорения (ВКУ) на оси ПСК; по оценкам проекций ВКУ прогнозируют на некоторый заданный момент времени T1 значение каждой проекции ВКУ на оси ПСК; выполняют измерения датчиками углов курсовертикали на том же интервале времени от t0 до tn и определяют n значений каждого из углов Эйлера; проводят оценки каждого из углов Эйлера, по полученным оценкам углов Эйлера прогнозируют значение углов Эйлера на тот же заданный момент времени T1, по полученным значениям углов Эйлера определяют угловое положение связанной системы координат (ССК) относительно БСК; по показаниям акселерометров курсовертикали определяют проекции ВКУ на оси БСК; в по угловому положению ССК относительно БСК и проекциям ВКУ на оси БСК определяют проекции ВКУ на оси ССК; затем осуществляют разворот пусковой установки с БИБ и выставляют ее на вторые заданные углы возвышения и азимута; по сигналам с акселерометров БИБ, а также сигналам акселерометров и датчиков углов курсовертикали, повторяя те же операции, что и на первых углах возвышения и азимута, в ВУ определяют проекции второго ВКУ на оси ПСК и ССК на другой заданный момент времени Т2 и угловое положение ССК относительно БСК; по полученным значениям проекций двух векторных величин - двух ВКУ на оси ПСК и ССК определяют в ВУ угловое положение ПСК относительно ССК и, учитывая известное угловое положение ССК относительно БСК, выполняют вышеуказанное определение углового положения ПСК относительно БСК; по спрогнозированным на заданный другой момент времени T2 проекциям ВКУ на оси ПСК уточняют в ВУ угловое положение ПСК относительно плоскости горизонта базовой (стартовой) системы координат.
Начальная ориентация приборной системы координат БИБ относительно базовой системы координат используется в качестве начального условия для решения уравнения Пуассона в бесплатформенных инерциальных навигационных системах. Поэтому все исходные параметры, которые используются для определения начальной ориентации, должны соответствовать значениям, которые они будут иметь на момент начала решения уравнения Пуассона. Для этого предлагается ввести прогноз (экстраполяцию) значений всех используемых параметров на минимально необходимое время вперед, которое совпадает с заранее известным началом решения уравнения Пуассона. Предлагаемый способ прогноза упрощает согласования шкал времени при измерении векторов в разных системах отсчета разными средствами, реализуется достаточно просто с необходимой точностью.
Для этого предлагается использовать при обработке входной информации для определения начальной ориентации метод анализа регрессий. (Д.Худсон. Статистика для физиков. М.: МИР, 1967 г.). Кривая регрессии представляет геометрическое место точек, соответствующих средним значениям случайной величины у(х). Среднее значение у представляет функцию от х

где М - обозначение математического ожидания,
Θ - обозначение набора неизвестных параметров, полностью определяющих функцию η (х, Θ)
Стандартный метод оценки линии регрессии основан на использовании следующей линейной относительно параметров модели:

где f0(x), f1(x)...fr(x) - заданные функции.
Чтобы получить оценку η(хi), достаточно в качестве приближения для η(хi) использовать разложение в ряд Тейлора или в ряд Фурье, а оценки неизвестных параметров Θi, где i=(0,1...r), проводить методом наименьших квадратов.
При разложении в ряд Тейлора:

При разложении в ряд Фурье:

Чтобы получить оценку η(хi) используют выборку случайной величины у(хi).
В общем виде случайную величину уi можно записать как:

где εi - ошибки, представляющие случайные величины с одинаковой дисперсией. Ошибки εi характеризует разброс уi относительно их математического ожидания М [уi]. Если дисперсии уi не одинаковы, то вводят весовые коэффициенты. Тогда оценки  полученные методом наименьших квадратов, обладают наибольшей точностью.
полученные методом наименьших квадратов, обладают наибольшей точностью.
Параметры Θ0, Θ1,...Θr определяются методом наименьших квадратов по формуле:



При разложении в ряд Тейлора матрица А имеет вид:
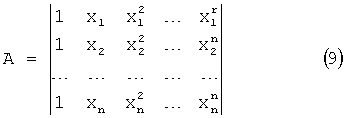
Матрица А имеет n строк и р столбцов, при этом р=r+1,
r - степень аппроксимации
 - матрица из одного столбца, составленного из n экспериментальных значений случайной величины у(хi).
- матрица из одного столбца, составленного из n экспериментальных значений случайной величины у(хi).
В общем случае матрица А имеет вид:

Уравнение (6) имеет решение при условии, что матрица ATA является неособенной. Разность между аппроксимируемой величиной

и экспериментальным значением уi называется остатком. При этом i-й остаток равен:

а остаточный вектор равен:

Аппроксимируемый вектор  равен:
равен:

Сумма квадратов остатков называется остаточной суммой квадратов R. Для оценки σ2 можно использовать остаточную сумму квадратов R.
где р=r+1 - ранг матрицы А;
n - объем выборки.

Остаточная сумма квадратов R равна исходной сумме квадратов уTу за вычетом суммы квадратов  полученной в результате аппроксимации Θ. При вычислении R рекомендуется пользоваться равенством:
полученной в результате аппроксимации Θ. При вычислении R рекомендуется пользоваться равенством:

Например, при аппроксимации приращений проекций вектора кажущейся скорости на оси приборной системы координат xп, уп, zп полиномом степени r случайную величину Wi(t) можно записать в виде:

i=xп, уп, zп;
r - степень полинома;
Wi - значения i-й проекции вектора кажущейся скорости в моменты t, определенные по информации акселерометров Аx, Аy, Аz БИБ;
Θ0i, Θ1i,...Θri - неизвестные параметры, которые определяют функции Wi,
t- время,
εi - ошибки, представляющие случайные величины.
Оценка проекций вектора кажущейся скорости имеет вид:

Оценка проекций кажущегося ускорения равна:

Параметры  определяются методом наименьших квадратов по формуле:
определяются методом наименьших квадратов по формуле:
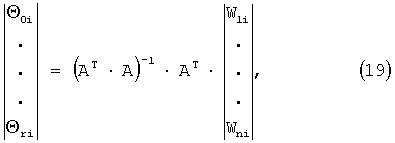
где  - известные значения приращений проекций вектора кажущейся скорости на известные моменты времени tj, j=1...n;
- известные значения приращений проекций вектора кажущейся скорости на известные моменты времени tj, j=1...n;
n - объем выборки;
А - матрица из известных моментов времени tj вида:
Аналогичным образом проводят оценки углов, получаемых по сигналам с датчиков углов курсовертикали.
В заявленном способе обработка сигналов с выходов измерительных приборов и все последующие расчеты осуществляются в вычислительном устройстве.
Таким образом, заявленный способ определения начальной выставки бесплатформенного инерциального блока (БИБ) управляемого объекта относительно базовой (стартовой) системы координат (БСК), материализованной стабилизированной платформой курсовертикали, установленной на пусковой установке, заключается в том, что осуществляют разворот вместе с пусковой установкой управляемого объекта на заданные углы возвышения и азимута и проводят измерения чувствительными элементами двух векторных величин, по полученным результатам измерений определяют угловое положение приборной системы координат (ПСК, связана с приборной площадкой БИБ) относительно БСК.
Отличительная особенность способа состоит в том, что выполняют следующую последовательность действий: осуществляют разворот пусковой установки с БИБ и выставку ее на первые заданные углы возвышения и азимута;
проводят измерения акселерометрами БИБ в малоподвижном относительно Земли положении пусковой установки на интервале времени от t0 до tn; определяют в вычислительном устройстве (ВУ) n приращений каждой из проекций вектора кажущейся скорости (ВКС) на оси приборной системы координат (ПСК) за известные заданные интервалы времени от t0 до tj (j=1,...,n) и получают проекции ВКС на оси ПСК;
проводят оценку каждой полученной проекции ВКС на оси ПСК и рассчитывают оценку каждой проекции вектора кажущегося ускорения (ВКУ) на оси ПСК;
по оценкам проекций ВКУ прогнозируют на некоторый заданный момент времени T1 значение каждой проекции ВКУ на оси ПСК;
выполняют измерения датчиками углов курсовертикали на том же интервале времени от t0 до tn и определяют n значений каждого из углов Эйлера;
проводят оценки каждого из углов Эйлера, по полученным оценкам углов Эйлера прогнозируют значение углов Эйлера на тот же заданный момент времени T1 и по полученным значениям углов Эйлера определяют угловое положение связанной системы координат (ССК, связанной с корпусом управляемого объекта) относительно БСК;
по показаниям акселерометров курсовертикали определяют проекции ВКУ на оси БСК;
по угловому положению ССК относительно БСК и проекциям ВКУ на оси БСК определяют проекции ВКУ на оси ССК;
затем осуществляют разворот пусковой установки с БИБ и выставляют ее на вторые заданные углы возвышения и азимута;
по сигналам с акселерометров БИБ, а также сигналам акселерометров и датчиков углов курсовертикали, повторяя те же операции, что и на первых углах возвышения и азимута, в ВУ определяют проекции второго ВКУ на оси ПСК и ССК на заданный момент времени Т2 и угловое положение ССК относительно БСК;
по полученным значениям проекций двух векторных величин - двух ВКУ на оси ПСК и ССК определяют в ВУ угловое положение ПСК относительно ССК и, учитывая известное угловое положение ССК относительно БСК, выполняют вышеуказанное определение углового положения ПСК относительно БСК;
по спрогнозированным на заданный момент времени Т2 проекциям ВКУ на оси ПСК уточняют в ВУ угловое положение ПСК относительно плоскости горизонта базовой (стартовой) системы координат.
Изобретение относится к области приборостроения и может быть использовано при выставке бесплатформенных инерциальных навигационных систем управления. Способ основан на предварительной обработке входной информации, получаемой в виде сигналов с датчиков углов курсовертикали и с акселерометров бесплатформенного инерциального блока (БИБ), основанной на методе наименьших квадратов для определения параметров аппроксимирующих функций, использовании проекций векторов кажущегося ускорения, учете подвижности бесплатформенного инерциального блока и пакета направляющих относительно Земли и прогнозировании значений используемых векторов на заданный момент времени при измерении этих векторов в разных системах отсчета разными средствами и упрощением согласования шкал времени. Технический результат заключается в существенном снижении требований к неподвижности БИБ относительно Земли во время проведения измерений и повышении точности определения начальной выставки приборной системы координат бесплатформенного инерциального блока относительно базовой (стартовой) системы координат.
Способ определения начальной выставки бесплатформенного инерциального блока (БИБ) управляемого объекта относительно базовой (стартовой) системы координат (БСК), материализованной стабилизированной платформой курсовертикали, установленной на пусковой установке, заключающийся в том, что осуществляют разворот вместе с пусковой установкой управляемого объекта на заданные углы возвышения и азимута и производят измерения чувствительными элементами двух векторных величин, по полученным результатам измерений определяют угловое положение приборной системы координат (ПСК, связана с приборной площадкой БИБ) относительно БСК,
отличающийся тем, что выполняют следующую последовательность действий:
осуществляют разворот пусковой установки с БИБ и выставку ее на первые заданные углы возвышения и азимута;
производят измерения акселерометрами БИБ в малоподвижном относительно Земли положении пусковой установки на интервале времени от t0 до tn;
определяют в вычислительном устройстве (ВУ) n приращений каждой из проекций вектора кажущейся скорости (ВКС) на оси приборной системы координат (ПСК) за известные заданные интервалы времени от t0 до tj (j=1,...,n) и получают проекции ВКС на оси ПСК;
проводят оценку каждой полученной проекции ВКС на оси ПСК и рассчитывают оценку каждой проекции вектора кажущегося ускорения (ВКУ) на оси ПСК;
по оценкам проекций ВКУ прогнозируют на некоторый заданный момент времени T1 значение каждой проекции ВКУ на оси ПСК;
выполняют измерения датчиками углов курсовертикали на том же интервале времени от t0 до tn и определяют n значений каждого из углов Эйлера;
проводят оценки каждого из углов Эйлера, по полученным оценкам углов Эйлера прогнозируют значение углов Эйлера на тот же заданный момент времени T1 и по полученным значениям углов Эйлера определяют угловое положение связанной системы координат (ССК, связанной с корпусом управляемого объекта) относительно БСК;
по показаниям акселерометров курсовертикали определяют проекции ВКУ на оси БСК;
по угловому положению ССК относительно БСК и проекциям ВКУ на оси БСК определяют проекции ВКУ на оси ССК;
затем осуществляют разворот пусковой установки с БИБ и выставляют ее на вторые заданные углы возвышения и азимута;
по сигналам с акселерометров БИБ, а также сигналам акселерометров и датчиков углов курсовертикали, повторяя те же операции, что и на первых углах возвышения и азимута, в ВУ определяют проекции второго ВКУ на оси ПСК и ССК на заданный момент времени Т2 и угловое положение ССК относительно БСК;
по полученным значениям проекций двух векторных величин - двух ВКУ на оси ПСК и ССК определяют в ВУ угловое положение ПСК относительно ССК и учитывая известное угловое положение ССК относительно БСК, выполняют вышеуказанное определение углового положения ПСК относительно БСК;
по спрогнозированным на заданный момент времени Т2 проекциям ВКУ на оси ПСК уточняют в ВУ угловое положение ПСК относительно плоскости горизонта базовой (стартовой) системы координат.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ВЫСТАВКИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2004 |
|
RU2279635C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ АКСЕЛЕРОМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2005 |
|
RU2289101C1 |
| RU 2059205 C1, 27.04.1996 | |||
| JP 8271279 A, 18.10.1996 | |||
| GB 1428037 A, 17.03.1976. | |||

