Изобретение относится к области навигации и может быть использовано при построении различных систем локации, предназначенных для определения местоположения движущихся объектов с использованием волн, излучаемых в виде лучей, и управления движением движущихся объектов путем коррекции их местоположения. Причем в качестве излучаемых волн, свойство отражения которых используют для измерения наклонных дальностей в многолучевом режиме измерения, выступают электромагнитные и иные типы волн, включая радио-, акустические волны и оптическое излучение, которые распространяются в воздушной, водной и безвоздушной средах.
Для обеспечения навигации движущихся объектов (ДО) проводят измерения их текущих координат, которые определяют с использованием волн для применения в различных системах локации. В дальнейшем будем использовать излучаемые волны в виде электромагнитных волн диапазона радиоволн, свойство отражения которых используют для измерения наклонной дальности при определении местоположения ДО.
В основе систем локации лежат корреляционно-экстремальные способы навигации (КЭСН), обеспечивающие отыскание и слежение за оптимальным режимом движения ДО [1]. КЭСН обеспечивают измерение показателей экстремального режима ДО, обработку указанной информации и коррекцию координат местоположения ДО. Наиболее часто используют картосчислительные КЭСН по геофизическим полям, основанные на сравнении текущих карт местности, полученных с использованием радиоволн во время движения ДО, с эталонными картами той же местности, исходно установленными на ДО, в основе которых лежит определение местоположения ДО путем коррекции их местоположения. По отклонениям эталонных карт местности от текущих в заданной точке траектории движения ДО определяют отклонение фактической траектории от заданной. В результате сравнения эталонных и текущих карт местности вырабатывают поправки (сигнал коррекции) в координаты ДО для коррекции местоположения ДО.
Сравнение эталонной и текущей карт осуществляется на основе вычисления функционалов, достигающих глобального экстремума при полном совмещении изображений указанных карт. Для обработки полученной при движении ДО информации используют разностные алгоритмы, основанные на вычислении разностей измеренных высот текущей карты.
Известен способ навигации движущихся объектов [2], использующийся в корреляционно-экстремальных системах навигации и заключающийся в определения местоположения ДО с использованием радиоволн.
Реализация способа [2] заключается в следующем.
Используют информацию эталонной карты местности о навигационном поле земли, которая изначально установлена на ДО.
Выбирают на эталонной карте участок местности - мерный участок, который определяется величиной допустимых отклонений ДО по дальности (квадрат неопределенности).
Измеряют с использованием одного луча радиоволн значения высот  («т» означает текущую карту) от ДО до рельефа мерного участка в i точках (i=1,2,3,…N) траектории движения ДО (трассы ).
(«т» означает текущую карту) от ДО до рельефа мерного участка в i точках (i=1,2,3,…N) траектории движения ДО (трассы ).
Вычисляют, после прохождения всего мерного участка, отклонения  высот , измеренных с помощью радиоволн, от высот Hoi, измеренных бародатчиком (абсолютная высота), в точках i траектории движения ДО в виде
высот , измеренных с помощью радиоволн, от высот Hoi, измеренных бародатчиком (абсолютная высота), в точках i траектории движения ДО в виде

Составляют для мерного участка текущую карту на основе вычисленных высот рельефа  , после прохождения всего мерного участка, то есть получают карту высот рельефа мерного участка (плановые координаты мерного участка), для составления которой используют данные о скорости и углах эволюции (тангаж, крен и курс) ДО.
, после прохождения всего мерного участка, то есть получают карту высот рельефа мерного участка (плановые координаты мерного участка), для составления которой используют данные о скорости и углах эволюции (тангаж, крен и курс) ДО.
Определяют на основе эталонной карты местности трассы  («э» означает эталонную карту), направленные вдоль мерного участка с шагом j (j=l,2,3,…N) поперек мерного участка, соответствующим шагу эталонной карты (плановые координаты эталонной карты) Δ.
(«э» означает эталонную карту), направленные вдоль мерного участка с шагом j (j=l,2,3,…N) поперек мерного участка, соответствующим шагу эталонной карты (плановые координаты эталонной карты) Δ.
Совмещают текущую и эталонную карты исследуемой местности.
Сравнивают текущее  и эталонное
и эталонное  значения путем корреляционно-экстремальной обработки реализаций с использованием разностных алгоритмов КЭСН.
значения путем корреляционно-экстремальной обработки реализаций с использованием разностных алгоритмов КЭСН.
Вычисляют сигнал коррекции местоположения ДО по трем координатам на основе анализа взаимного смещения эталонной и текущей карт местности мерного участка.
Управляют движением ДО путем коррекции его местоположения.
Недостатками способа [2] являются.
Траектория движения ДО разделена на два последовательных участка: наблюдения (мерный участок) и коррекции (участок коррекции). Выработка сигнала коррекции происходит только после прохождения всего мерного участка на участке коррекции. Поэтому нет информации о текущем местоположении ДО в процессе движения над мерным участком, поскольку обработка измеренной информации осуществляется после прохождения всего мерного участка.
Необходимость измерения абсолютной высоты ДО над нулевым уровнем НO эталонной карты, а также необходимы дополнительные вычисления для определения средних уровней высот измеренной карты и эталонной карты. Проведение указанных вычислений не позволяет реализовать оперативную обработку данных за время движения ДО над мерным участком.
Низкая точность составления текущей карты с использованием одного луча, поскольку для измерения высоты до исследуемой местности ширина луча радиоволн должна быть достаточно широкой. Это снижает точность определения наклонной дальности и соответственно снижается точность составления текущей карты.
Зависимость точности вычисления сигнала коррекции траектории движения ДО от шага Δ вдоль мерного участка эталонной карты местности. Для повышения точности вычисления сигнала коррекции траектории движения необходимо уменьшение шага Δ вдоль мерного участка и соответственно пропорциональное увеличение объема хранимой на движущемся объекте априорной информации и объема производимых вычислений. Это ограничивает точность вычисления сигнала коррекции траектории движения.
Известен способ навигации движущихся объектов [3], выбранный за прототип.
Реализация способа [3] заключается в следующем.
Используют информацию эталонной карты местности, установленной на ДО до проведения измерений, о навигационном поле земли.
Выбирают необходимый участок местности эталонной карты (мерный участок), находящийся в пределах эталонной карты и задаваемый в виде высот рельефа в узлах координатной сетки с шагом Δ, наложенной на мерный участок.
Составляют текущую карту путем многолучевых (число лучей нечетное и составляет не менее трех) измерений параметров мерного участка с помощью лучей радиоволн, которые излучают следующим образом. Первым излучают луч, направление распространения которого расположено в плоскости, ортогональной плоскости горизонта исследуемой поверхности (первый луч). Далее излучают лучи, направления распространения которых не совпадают с направлением распространения первого луча, причем направления распространения одной части лучей находятся слева (по направлению движения ДО) от первого луча, а другой части - справа (по направлению движения ДО) от первого луча. Количество лучей справа и слева от первого луча одинаковое. Вычисляют местоположение ДО в плановых координатах мерного участка на основе измерений наклонных дальностей с помощью лучей радиоволн.
Вычисляют показатель близости данных в результате сравнения текущей и эталонных карт.
После определения текущего местоположения ДО в плановых координатах мерного участка вычисляют текущую высоту ДО в координатах мерного участка как сумму высоты, представляющей собой значение измеренной наклонной дальности, умноженное на косинус угла наклона луча относительно перпендикуляра к поверхности мерного участка, и поправки, определяемой по эталонной карте, представляющей собой разность высот рельефа в точке определения наклонной дальности и точке, находящейся на линии перпендикуляра к поверхности мерного участка.
Текущую карту получают последовательно по мере прохождения отдельных частей мерного участка - в темпе поступления измеренной информации.
Определяют траекторию движения ДО на эталонной карте.
Управляют движением ДО путем коррекции их местоположения по мере прохождения мерного участка. Управление движением ДО осуществляется в темпе поступления измеренной информации по мере прохождения мерного участка за счет коррекции местоположения ДО по трем координатам.
Недостатками способа [3] являются.
Низкая точность определения местоположения движущихся объектов. Поскольку точность вычисления сигнала коррекции траектории движения ДО зависит от шага Δ вдоль мерного участка эталонной карты местности, значение которого априори задано и неизменно.
Ограничение потенциальной точности вычисления сигнала коррекции траектории движения, поскольку для повышения точности необходимо уменьшение шага Δ, что ведет к пропорциональному увеличению объема хранимой на ДО априорной информации и объема производимых вычислений. Последнее является чрезвычайно сложной в реализации технической задачей.
Техническим результатом предлагаемого изобретения является повышение точности способа навигации движущихся объектов за счет того, что при получении сигнала коррекции местоположения для управления движением движущихся объектов используют режим проведения измерений с установкой на эталонной карте новых квадратов неопределенности и введения в каждом новом квадрате неопределенности нового шага ΔНОВ координатной сетки, меньшего исходного, и уменьшении количества измерений без пропорционального увеличения объема хранимой на движущемся объекте априорной информации и объема производимых вычислений.
Технический результат достигается тем, что в способе навигации движущихся объектов, заключающемся в использовании эталонной карты местности как априорной информации о навигационном поле, выборе участка местности (мерный участок), находящегося в пределах эталонной карты и задаваемого в виде высот рельефа в узлах координатной сетки с шагом Δ, наложенной на мерный участок, составлении текущей карты путем вычисления плановых координат мерного участка на основе измерений наклонных дальностей с помощью многолучевого режима измерения при помощи радиоволн, излучаемых в виде лучей, определении разности результатов многолучевых измерений, сравнении значений плановых координат текущей и эталонной карт в пределах квадрата неопределенности, получении сигнала коррекции траектории движения по трем координатам эталонной карты (плановые координаты и высота) на основе вычисления показателя близости данных при количестве измерений K с привязкой к узлам координатной сетки и управлении движением движущихся объектов путем коррекции их местоположения, сначала определяют предварительное местоположение движущихся объектов без получения сигнала коррекции траектории движения с привязкой к узлам координатной сетки по вычисленным при последних многолучевых измерениях координатам пересечения лучей волн с рельефом мерного участка, а затем уточняют местоположение движущихся объектов путем использования режима проведения измерений с установкой на эталонной карте новых квадратов неопределенности, размеры которых определяются погрешностью вычисления сигнала коррекции траектории движения с привязкой к узлам координатной сетки, а количество определяется количеством лучей многолучевых измерений, и введения в каждом новом квадрате неопределенности нового шага ΔНОВ координатной сетки, причем ΔНОВ<Δ, а поверхности между узлами новой координатной сетки эталонной карты являются поверхностями второго порядка, составляют текущую карту путем измерения наклонных дальностей с помощью многолучевого режима измерения при помощи волн, излучаемых в виде лучей, и вычисления плановых координат мерного участка на основе измерений наклонных дальностей с помощью многолучевого режима измерения при помощи волн, причем в качестве волн выступают электромагнитные и иные типы волн, которые распространяются в воздушной, водной и безвоздушной средах, определяют разности результатов многолучевых измерений, сравнивают значения координат текущей и эталонных карт в пределах новых квадратов неопределенностей, получают сигнал коррекции траектории движения по трем координатам эталонной карты (плановые координаты и высота) на основе вычисления нового показателя близости данных при количестве измерений S для новой координатной сетки с шагом ΔНОВ, причем S<K, с привязкой к узлам новой координатной сетки для управления движением движущихся объектов путем коррекции их местоположения.
Технический результат достигается тем, что при реализации способа навигации движущихся объектов привязку к эталонной карте проводят в следующем виде: определяют предварительное местоположение ДО по трем координатам эталонной карты с заданным шагом координатной сетки на основе измерений наклонной дальности за K измерений, а затем уточняют за S измерений местоположение ДО по трем координатам эталонной карты, используя координатную сетку с меньшим шагом, который будет определять требуемую точность вычисления сигнала коррекции траектории движения движущихся объектов.
В результате способ навигации движущихся объектов позволяет определить местоположение ДО при прохождении мерного участка с меньшей погрешностью по сравнению с аналогом и прототипом.
Способ навигации ДО поясняют следующие чертежи:
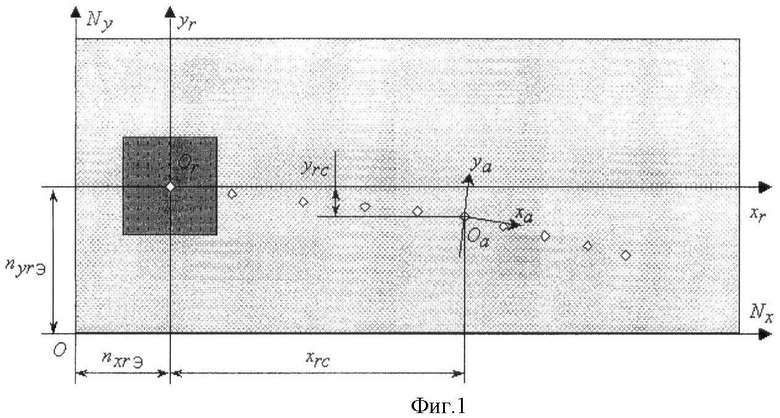
- на фиг.1 представлено взаимное расположение систем координат при движении ДО;
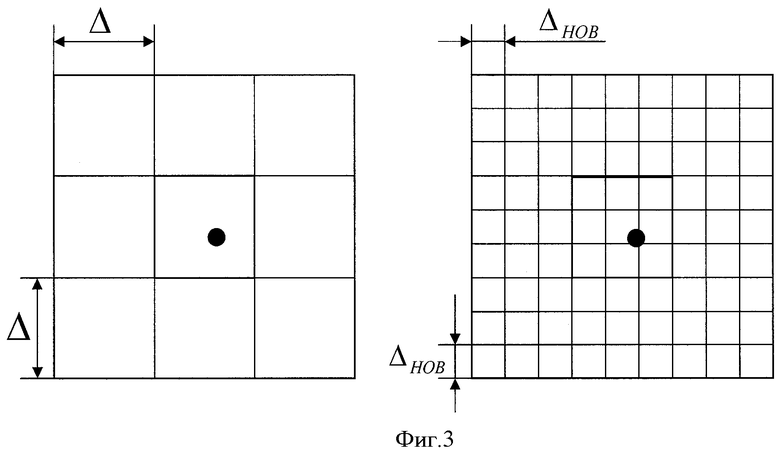
- на фиг.2 показано измерение наклонной дальности по отдельным лучам радиоволн;
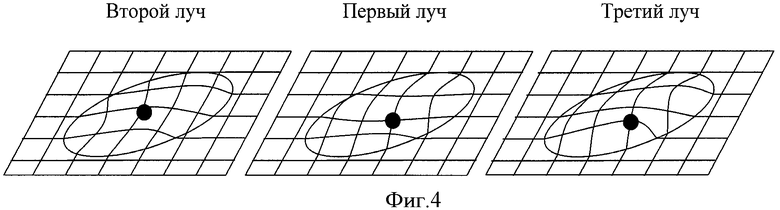
- на фиг.3 приведены: слева - квадрат неопределенности с координатной сеткой с исходным шагом Δ, справа - квадрат неопределенности с координатной сеткой с новым шагом ΔНОВ (черная точка внутри квадрата неопределенности - расположение координат пересечения луча волн с рельефом мерного участка);
- на фиг.4 показаны для трехлучевого измерения квадраты неопределенности с новой координатной сеткой, имеющей шаг ΔНОВ, и использование поверхностей второго порядка между узлами новой координатной сетки эталонной карты, причем три квадрата неопределенности соответствуют трем лучам в данном такте измерения.
Способ навигации ДО осуществляется следующим образом.
Используют информацию эталонной карты местности, которая изначально установлена на ДО, о навигационном поле земли.
Выбирают участок местности (мерный участок) на известной (заданной) эталонной карте местности, на которую наложена исходная координатная сетка с шагом Δ. Мерный участок задается в виде высот рельефа в узлах координатной сетки.
Используют свойство отражения волн, в качестве которых выступают электромагнитные и иные типы волн, включая радио-, акустические волны и оптическое излучение, которые распространяются в различных средах: в воздушной, безвоздушной и водной. В дальнейшем, для определенности, будем использовать излучение в воздушной среде электромагнитных волн диапазона радиоволн, свойство отражения которых используют для измерения наклонных дальностей при определении местоположения ДО.
Составляют текущую карту путем вычисления плановых координат мерного участка на основе K измерений наклонных дальностей с помощью многолучевого режима измерения при помощи радиоволн, излучаемых в виде лучей, которые в каждом измерении излучают в следующей последовательности. В начале излучают луч, направление распространения которого расположено в плоскости, ортогональной плоскости горизонта исследуемой поверхности, который будет первым лучом. Далее излучают лучи, направления распространения которых не совпадают с направлением распространения первого луча, причем направления распространения одной части лучей находятся слева (по направлению движения ДО) от первого луча, а другой части - справа (по направлению движения ДО) от первого луча. Количество лучей справа и слева от первого луча одинаковое. Текущую карту получают в темпе поступления измеренной информации, то есть последовательно по мере прохождения ДО отдельных частей мерного участка.
Определяют разности результатов многолучевых измерений для вычисления показателя близости данных.
Проводят вычисления, аналогичные описанным выше, по эталонной карте для каждого возможного положения ДО внутри квадрата неопределенности, размеры которого определяются погрешностью определения местоположения ДО на момент начала определения местоположения.
Вычисляют для всех гипотез внутри квадрата неопределенности с шагом координатной сетки Δ слагаемые показателя близости.
Проводят по завершении всех измерений поиск экстремума показателя близости.
Вычисляют предварительное местоположение ДО по трем координатам эталонной карты (плановые координаты и высота) с привязкой к узлам координатной сетки с шагом Δ.
После вычисления предварительного местоположения ДО с привязкой к узлам координатной сетки устанавливают на эталонной карте новые квадраты неопределенности, размеры которых определяются погрешностью вычисления предварительного местоположения ДО с привязкой к узлам координатной сетки, центры координат новых квадратов неопределенности соответствуют полученным при последних многолучевых измерениях координатам пересечения лучей волн с рельефом мерного участка, их количество определяется количеством лучей многолучевых измерений. Первому лучу, направление распространения которого расположено в плоскости, ортогональной плоскости горизонта исследуемой поверхности, соответствует первый новый квадрат неопределенности. Второму лучу -второй новый квадрат неопределенности и т.д.
Проводят измерения, используя новые квадраты неопределенности на эталонной карте, размеры которых определяются погрешностью вычисления предварительного местоположения ДО с привязкой к узлам координатной сетки, а количество определяется количеством лучей многолучевых измерений, и вводят в каждом новом квадрате неопределенности новый шаг ΔНОВ координатной сетки, который меньше исходного или ΔНОВ<Δ (фиг.3), а поверхности между узлами новой координатной сетки эталонной карты являются поверхностями второго порядка (фиг.4).
Составляют текущую карту путем измерения наклонных дальностей с помощью многолучевого режима измерения при помощи волн, излучаемых в виде лучей и вычисления плановых координат мерного участка на основе S измерений наклонных дальностей с помощью многолучевого режима измерения при помощи волн, которые излучают в виде лучей в последовательности, указанной выше, причем S<K.
Определяют разности результатов многолучевых измерений для вычисления показателя близости данных.
Проводят вычисления слагаемых показателя близости, аналогичные описанным выше, по эталонной карте для каждого возможного положения ДО внутри новых квадратов неопределенности с шагом ΔНОВ.
Проводят по завершении всех измерений поиск экстремума показателя близости.
Определяют уточненное местоположение ДО с точностью, определяемой новым шагом ΔНОВ эталонной карты по трем координатам: плановым координатам и высоте над исследуемой местностью.
Вычисляют сигнал коррекции траектории движения ДО по трем координатам эталонной карты (плановые координаты и высота) с привязкой к узлам координатной сетки с шагом ΔНОВ.
Управляют движением ДО путем коррекции их местоположения с точностью, определяемой шагом ΔНОВ новой координатной сетки, причем всегда выполняется условие ΔНОВ<Δ.
Способ навигации реализуется следующим образом.
При проведении вычислений в КЭСН используют:
- эталонную карту, представляющую собой массив данных о рельефе местности, элементы которого представляют собой высоты рельефа в узлах координатной сетки с шагом Δ эталонной карты на плоскости Orxryr;
- данные о законе изменения рельефа эталонной карты между узлами координатной сетки с шагом Δ;
- данные, определяемые углом между лучами αR радиоволн;
- данные измерений, отличных от полученных с помощью лучей радиоволн, поступающие с каждым результатом измерений: значения угла αz крена, угла αx курса, угла αt тангажа, скорости ν ДО;
- текущую карту, представляющую собой набор значений наклонных дальностей по всем трем лучам, полученных в каждом измерении.
Выбирают участок местности (мерный участок) на известной (заданной) эталонной карте местности с исходным шагом координатной сетки Δ. Эталонная карта представляет собой двумерный массив данных.
Составляют текущую карту. Реализацию способа навигации движущихся объектов рассмотрим на примере составления текущей карты с использованием радиоволн путем вычисления плановых координат мерного участка на основе измерений наклонных дальностей с помощью трехлучевого режима измерения. Лучи излучают в следующей последовательности. В начале излучают луч, направление распространения которого расположено в плоскости, ортогональной плоскости горизонта исследуемой поверхности, который будет первым лучом. Далее излучают лучи, направления распространения которых не совпадают с направлением распространения первого луча, причем направление распространения одного луча находится слева (по направлению движения ДО) от первого луча, а другого - справа (по направлению движения ДО) от первого луча. При проведении трехлучевых измерений луч слева это второй луч, а луч справа это третий луч.
По измеренным значениям наклонных дальностей до элементов подстилающей поверхности Dj (j∈[1, 3] - номер луча радиоволн) определяют координаты точек измерений в системе координат, связанной с ДО, а также измеряемые значения высоты рельефа Нj.
При определении координат точек будем применять следующие системы координат, показанные на фиг.1, для:
- эталонной карты рельефа местности (большой прямоугольник на фиг.1);
- квадрата неопределенности (квадрат на фиг.1);
- возможных положений ДО внутри квадрата неопределенности в момент начала измерений (точки на фиг.1), и точек траектории ДО, в которых производят измерения (ромбы на фиг.1).
Местная плановая система координат является левой прямоугольной декартовой системой координат Orxryrzr с началом Or. При этом оси Orxr и Oryr лежат в плоскости местного горизонта, то есть xr и yr являются плановыми координатами ДО. Относительно плоскости Orxryr определяют высоты рельефа местности и ДО. Таким образом, указанные высоты являются соответствующими значениями координаты zr. Начало координат Or выбрано так, что ось Oryr направлена в расчетную точку появления ДО над участком местности, соответствующим эталонной карте. Ось Oryr считается коллинеарной по отношению к горизонтальной составляющей расчетного вектора скорости ДО (фиг.1). Местная плановая система координат неподвижна и связана с эталонной картой.
Для того чтобы привязать плановые координаты к эталонной карте, используют дискретную плановую систему координат. При этом оси Nx и Ny сонаправлены с осями местной системы Orxryr (фиг.1). Нулевым индексам в дискретной системе координат соответствует левый нижний угол эталонной карты. Предполагаемое значение дискретных координат ДО в момент начала сбора данных Or обозначим как (nxrЭ, nyrЭ). Связь между координатами дискретной и местной плановых систем координат определяется выражениями вида

где Δ - шаг сетки эталонной карты.
При определении координат точек измерений в виде точек пересечения подстилающей поверхности и лучей радиоволн используют систему координат, связанную с текущим положением ДО. Начало координат этой системы (точка Oa) поместим в текущую точку проекции траектории ДО на плоскость плановых координат. Ось Oaxa по направлению совпадает с текущим направлением вектора скорости ДО.
Для каждого луча j систему уравнений, используя фиг.2, получим в следующем виде

По полученным данным о скорости и углах эволюции определяют координаты проекции точки траектории ДО на плоскость плановых координат.
Для первого измерения эти координаты считаются нулевыми (то есть положение ДО во время первого измерения совпадает с началом координат
системы Orxryr)

Местные координаты ДО во время выполнения следующих измерений вычисляют по рекуррентным соотношениям

где  и
и  - координаты проекции текущего положения ДО на плоскость плановых координат,
- координаты проекции текущего положения ДО на плоскость плановых координат,  - курс ДО в текущей точке измерений (угол между вектором скорости ДО и осью Orxr), Tc - период поступления измеренных данных, i=1,2,… - номер текущего измерения.
- курс ДО в текущей точке измерений (угол между вектором скорости ДО и осью Orxr), Tc - период поступления измеренных данных, i=1,2,… - номер текущего измерения.
Зная координаты точек измерений в системе координат, связанной с ДО, (Oaxaya) и местные координаты начала Oa, определяют координаты точек измерений в плановой системе координат

Определяют разности результатов многолучевых измерений для вычисления показателя близости данных. Используемый алгоритм состоит в определении разности измерений второго и первого лучей, третьего и первого лучей текущего измерения, а также определении разности измерений первого луча в текущем и предыдущем измерениях.
Для каждого из возможных положений ДО в пределах квадрата неопределенности вычисляют координаты точек измерений в плановой системе координат, которые определяют как

где nhx и nhy - смещения точки Or для различных гипотез, определенные в узлах координатной сетки эталонной карты.
Проводят вычисления разности результатов многолучевых измерений для вычисления показателя близости данных по эталонной карте для каждого возможного положения ДО внутри квадрата неопределенности, размеры которого определяются погрешностью определения местоположения ДО на момент начала определения местоположения.
Текущая карта местности определяется матрицей H(nx, ny) размером Nх×Ny, а эталонная карта - матрицей HЭ(nx, ny) размером NxЭ×NyЭ.
Вычисляют для каждого из возможных положений ДО в пределах квадрата неопределенности с шагом координатной сетки Δ (для всех гипотез) слагаемые показателя близости.
Для данного случая локальный показатель близости данных имеет вид

Здесь nhx и nhy - смещения точки Or для различных гипотез; K - количество измерений;  - разность измеренных в k-м измерении значений высоты по первому и левому лучам;
- разность измеренных в k-м измерении значений высоты по первому и левому лучам;  - разность измеренных в k-м измерении значений высоты по первому и правому лучам;
- разность измеренных в k-м измерении значений высоты по первому и правому лучам;  - разность значений высоты измеренных в k-м и (k-1)-м измерениях;
- разность значений высоты измеренных в k-м и (k-1)-м измерениях;  - разность определенных для некоторой гипотезы (для определенного значения nhx и nhy) значений высоты по данным эталонной карты на k-м измерении по первому и левому лучам;
- разность определенных для некоторой гипотезы (для определенного значения nhx и nhy) значений высоты по данным эталонной карты на k-м измерении по первому и левому лучам;  - разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м измерении по первому и правому лучам;
- разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м измерении по первому и правому лучам;  - разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м и (k-1)-м измерениях по первому лучу.
- разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на k-м и (k-1)-м измерениях по первому лучу.
Проводят по завершении всех измерений поиск экстремума показателя близости.
Определяют предварительное местоположение ДО в плановых координатах мерного участка на основе анализа взаимных смещений эталонной и текущих карт местности мерного участка.
Вычисляют высоту ДО над поверхностью мерного участка в координатах мерного участка (в точке определения местоположения ДО в плановых координатах мерного участка) как сумму высоты, представляющей собой значение измеренной наклонной дальности, умноженное на косинус угла наклона луча относительно перпендикуляра к поверхности мерного участка, и поправки, определяемой по эталонной карте, представляющей собой разность высот рельефа мерного участка в точке определения наклонной дальности и точке, находящейся на линии перпендикуляра к поверхности мерного участка.
Вычисляют предварительное местоположение ДО по трем координатам эталонной карты (плановые координаты и высота) с привязкой к узлам координатной сетки с шагом Δ.
Для обеспечения более высокой точности вычисления местоположения ДО используют режим проведения измерений за счет установки на эталонной карте новых квадратов неопределенности, размеры которых определяются погрешностью вычисления предварительного местоположения ДО с привязкой к узлам координатной сетки, центры координат соответствуют полученным при последних многолучевых измерениях координатам пересечения лучей волн с рельефом мерного участка, размеры от центров координат до сторон новых квадратов неопределенности равны погрешности вычисления предварительного местоположения ДО (стороны новых квадратов неопределенности равны удвоенной погрешности), а их количество определяется количеством лучей многолучевых измерений (фиг.3).
Условием сдвига каждого нового квадрата неопределенности на шаг координатной сетки Δ в направлении движения ДО является переход координат пересечения луча волн с рельефом мерного участка через координатную сетку.
На практике минимальное значение размера каждого нового квадрата неопределенности должно быть не менее Δ (шага координатной сетки) в каждом направлении от координат пересечения луча волн с рельефом мерного участка. Так, при нахождении координат пересечения луча волн с рельефом между узлами координатной сетки новый квадрат неопределенности должен накрывать не менее шестнадцати узлов координатной сетки с шагом Δ.
При проведении трехлучевых измерений будет три квадрата неопределенности - по одному на каждый луч в данном измерении (фиг.4). Первому лучу, направление распространения которого расположено в плоскости, ортогональной плоскости горизонта исследуемой поверхности, соответствует первый новый квадрат неопределенности. Второму лучу - второй новый квадрат неопределенности. Третьему лучу - третий новый квадрат неопределенности.
Вводят в каждом новом квадрате неопределенности новую координатную сетку с шагом ΔНОВ, меньшим исходного, как показано на фиг.3, так, что

Для обеспечения выполнения условия (10) используют поверхности второго порядка между узлами новой координатной сетки эталонной карты. Это означает, что поверхность с новой координатной сеткой с шагом ΔНОВ является криволинейной поверхностью (фиг.4), которая в общем виде задается совокупностью точек, координаты которых (x, y, h) удовлетворяют уравнению

Коэффициенты aik могут принимать любые действительные значения, но при i, k=1, 2, 3 не должны быть равны нулю одновременно. Корни характеристического уравнения поверхности второго порядка всегда действительные.
На практике минимальное значение шага координатной сетки ΔНОВ ограничено погрешностью измерений наклонных дальностей и погрешностью реализации поверхности эталонной карты между узлами координатной сетки заданной поверхностью второго порядка.
Составляют текущую карту с использованием радиоволн путем измерения наклонных дальностей с помощью многолучевого режима измерения при помощи волн, излучаемых в виде лучей и вычисления плановых координат мерного участка на основе измерений наклонных дальностей с помощью трехлучевого режима измерения. Лучи излучают в последовательности, аналогичной описанной выше.
По измеренным значениям наклонных дальностей до элементов подстилающей поверхности Dj (j∈[1, 3] - номер луча радиоволн) новых квадратов неопределенности определяют координаты точек измерений в системе координат, связанной с ДО, а также измеряемые значения высоты рельефа Нj.
Определяют разности результатов многолучевых измерений для вычисления показателя близости данных. Используемый алгоритм состоит в определении разности измерений второго (второй новый квадрат неопределенности) и первого лучей (первый новый квадрат неопределенности), третьего (третий новый квадрат неопределенности) и первого (первый новый квадрат неопределенности) лучей текущего измерения, а также определении разности измерений первого луча (первый новый квадрат неопределенности) в текущем и предыдущем измерениях.
Для каждого из возможных положений ДО в пределах первого нового квадрата неопределенности вычисляют, как описано выше, координаты точек измерений в плановой системе координат.
Проводят вычисления разности результатов многолучевых измерений для вычисления показателя близости данных по эталонной карте для каждого возможного положения ДО внутри первого нового квадрата неопределенности.
Вычисляют для каждого из возможных положений ДО в пределах первого нового квадрата неопределенности с шагом координатной сетки ΔНОВ (для всех гипотез) слагаемые показателя близости.
При этом локальный показатель близости данных будет иметь вид

Здесь  ,
,  - смещения точки
- смещения точки  для различных гипотез при новом значении шага ΔНОВ координатной сетки, S - количество измерений;
для различных гипотез при новом значении шага ΔНОВ координатной сетки, S - количество измерений;  - разность измеренных в s-м измерении значений высоты по первому и левому лучам;
- разность измеренных в s-м измерении значений высоты по первому и левому лучам;  - разность измеренных в s-м измерении значений высоты по первому и правому лучам;
- разность измеренных в s-м измерении значений высоты по первому и правому лучам;  - разность значений высоты измеренных в S-м и (s-1)-м измерениях;
- разность значений высоты измеренных в S-м и (s-1)-м измерениях;  - разность определенных для некоторой гипотезы (для определенного значения
- разность определенных для некоторой гипотезы (для определенного значения  ,
,  ) значении высоты по данным эталонной карты на s-м измерении по первому и второму лучам;
) значении высоты по данным эталонной карты на s-м измерении по первому и второму лучам;  - разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на s-м измерении по первому и третьему лучам;
- разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на s-м измерении по первому и третьему лучам;  - разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на s-м и (s-1)-м измерениях по первому лучу.
- разность определенных для некоторой гипотезы значений высоты по данным эталонной карты на s-м и (s-1)-м измерениях по первому лучу.
По завершении всех измерений производят поиск глобального экстремума показателя близости данных  .
.
Количество измерений S при уточнении местоположения ДО меньше количества измерений K при определении предварительного местоположения ДО, поскольку вычисление экстремума показателя близости данных  при уточнении местоположения проводится в окрестности глобального минимума показателя близости данных P(nhx, nhy), где высокая скорость изменения показателя близости данных.
при уточнении местоположения проводится в окрестности глобального минимума показателя близости данных P(nhx, nhy), где высокая скорость изменения показателя близости данных.
Определяют поправки к координатам местоположения ДО в плановых координатах мерного участка на основе анализа взаимных смещений эталонной и текущих карт местности мерного участка с точностью, определяемой шагом ΔНОВ новой координатной сетки.
Вычисляют высоту ДО над поверхностью мерного участка в координатах мерного участка (в точке определения местоположения ДО в плановых координатах мерного участка), как описано выше.
Вычисляют сигнал коррекции траектории движения ДО по трем координатам эталонной карты (плановые координаты и высота) с привязкой к узлам координатной сетки с шагом ΔНОВ.
Управляют движением движущихся объектов путем коррекции их местоположения с точностью, определяемой шагом ΔНОВ новой координатной сетки, причем всегда с более высокой точностью согласно выражению (10).
Характерно, что использование нового шага координатной сетки не ведет к пропорциональному увеличению объема хранимой на движущемся объекте априорной информации и объема производимых вычислений. Это связано с тем, что на движущемся объекте хранится эталонная карта, представляющая собой массив данных о рельефе местности, элементы которого представляют собой высоты рельефа в узлах координатной сетки с шагом Δ эталонной карты, а не с шагом ΔНОВ, и никаких предварительных вычислений не производится.
Таким образом, данный способ навигации ДО имеет существенные отличия от известных способов навигации, поскольку обеспечивает определение поправок местоположения ДО по трем координатам с использованием такого шага координатной сетки, который обеспечивает заданную точность навигации, чего нет в прототипе и аналоге.
Данный алгоритм КЭСН позволяет проводить коррекцию местоположения ДО при движении над мерным участком.
Важно отметить, что предложенный способ навигации ДО сохраняет свои положительные свойства при различном количестве лучей волн и обеспечивает работоспособность и для трех, и для большего количества лучей. Число используемых лучей определяется только временем, в течение которого обеспечивается измерение местоположения при движении ДО над мерным участком.
Использование координатной сетки с изменяемым шагом позволяет гибко управлять движением движущихся объектов в процессе их навигации.
Таким образом, способ навигации движущихся объектов обладает рядом существенных преимуществ перед аналогом и прототипом.
ЛИТЕРАТУРА
1. Белоглазов И.Н., Джангава Г.И., Чигин Т.П. Основы навигации по геофизическим полям. - М.: Наука, 1985. - 328 с. (с.10-11, 19-22, 25-26, 30-34).
2. Ржевкин В.А. Автономная навигация по картам местности // Зарубежная радиоэлектроника. - 1981. - N10. - С.3-28.
3. Патент №2338158 РФ, МПК G01C 21/00 (2006.01). Способ навигации летательных аппаратов / Хрусталев А.А., Кольцов Ю.В. Егоров С.Н. // Опубл. 10.11.2008. - Бюл. N31 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2008 |
|
RU2385468C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2338158C1 |
| Способ автоматической навигации лесозаготовительной машины в реальном масштабе времени в заданной системе координат | 2020 |
|
RU2777560C2 |
| Способ навигации летательных аппаратов | 2016 |
|
RU2611564C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2020 |
|
RU2739872C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2340874C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2471152C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2284544C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2680969C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2836616C1 |
Изобретение относится к области приборостроения и может быть использовано при построении различных приборных систем локации, предназначенных для определения местоположения движущихся объектов с использованием волн, излучаемых в виде лучей, и управления движением движущихся объектов путем коррекции их местоположения. Технический результат - повышение точности. Для достижения данного результата сначала на основе использования многолучевых измерений определяют позицию объекта без получения сигнала коррекции траектории его движения с привязкой к узлам координатной сетки. Затем уточняют местоположение движущихся объектов путем использования режима проведения измерений с установкой на эталонной карте новых квадратов неопределенности. Размеры квадратов на карте определяются погрешностью сигнала коррекции траектории движения с привязкой к узлам координатной сетки, а их количество - количеством лучей многолучевых измерений. При этом выбирают интервалы шагов измерения и соответствующих координатных сеток без увеличения объема хранимой на движущемся объекте априорной информации и объема производимых вычислений. 4 ил.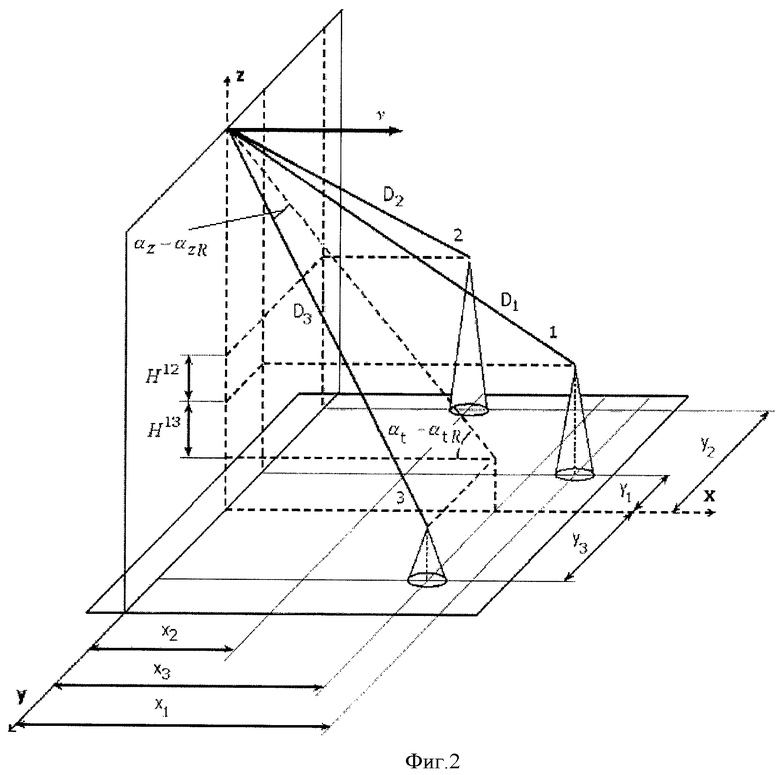
Способ навигации движущихся объектов, заключающийся в использовании эталонной карты местности как априорной информации о навигационном поле, выборе участка местности (мерный участок), находящегося в пределах эталонной карты и задаваемого в виде высот рельефа в узлах координатной сетки с шагом А, наложенной на мерный участок, составлении текущей карты путем вычисления плановых координат мерного участка на основе измерений наклонных дальностей с помощью многолучевого режима измерения при помощи радиоволн, излучаемых в виде лучей, определении разности результатов многолучевых измерений, сравнении значений плановых координат текущей и эталонной карт в пределах квадрата неопределенности, получении сигнала коррекции траектории движения по трем координатам эталонной карты (плановые координаты и высота) на основе вычисления показателя близости данных при количестве измерений К с привязкой к узлам координатной сетки и управлении движением движущихся объектов путем коррекции их местоположения, отличающийся тем, что сначала определяют предварительное местоположение движущихся объектов без получения сигнала коррекции траектории движения с привязкой к узлам координатной сетки по вычисленным при последних многолучевых измерениях координатам пересечения лучей волн с рельефом мерного участка, а затем уточняют местоположение движущихся объектов путем использования режима проведения измерений с установкой на эталонной карте новых квадратов неопределенности, размеры которых определяются погрешностью вычисления сигнала коррекции траектории движения с привязкой к узлам координатной сетки, а их количество определяется количеством лучей многолучевых измерений, и введения в каждом новом квадрате неопределенности нового шага ΔНОВ координатной сетки, причем ΔНОВ<Δ, а поверхности между узлами новой координатной сетки эталонной карты являются поверхностями второго порядка, составляют текущую карту путем измерения наклонных дальностей с помощью многолучевого режима измерения при помощи волн, излучаемых в виде лучей, и вычисления плановых координат мерного участка на основе измерений наклонных дальностей с помощью многолучевого режима измерения при помощи волн, причем в качестве волн выступают электромагнитные и иные типы волн, которые распространяются в воздушной, водной и безвоздушной средах, определяют разности результатов многолучевых измерений, сравнивают значения координат текущей и эталонных карт в пределах новых квадратов неопределенностей, получают сигнал коррекции траектории движения по трем координатам эталонной карты (плановые координаты и высота) на основе вычисления нового показателя близости данных при количестве измерений S для новой координатной сетки с шагом ΔНОВ, причем S<K, с привязкой к узлам новой координатной сетки для управления движением движущихся объектов путем коррекции их местоположения.
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2007 |
|
RU2338158C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2005 |
|
RU2284544C1 |
| РЖЕВКИН В.А | |||
| Автономная навигация по картам местности | |||
| Зарубежная радиоэлектроника, 1981, №10, с.7-8 | |||
| АНДРЕЕВ Г.А., ПОТАПОВ А.А | |||
| Активные системы ориентации по географическим полям // Зарубежная радиоэлектроника, 1988, № 9, с.62-85 | |||
| ЦЫПКИН Я.З., ПОПКОВ Ю.С | |||
| Теория нелинейных | |||

