Изобретение относится к медицине, а именно к неврологии с кондуктивной терапией, в частности кинезиотерапии, и предназначено для использования при реабилитации неврологических больных с двигательными нарушениями (тетрапарез, нижний парез, гемипарез), являющимися следствием различных заболеваний, родственных по клиническим проявлениям, прогнозу и патогенезу, таких как черепно-мозговая травма, повреждение спинного мозга, острое нарушение кровообращения, детский церебральный паралич.
Известен широкий арсенал средств реабилитации указанных больных, к которым относятся минеральные ванны, медикаментозные средства и в первую очередь физические упражнения (см. Физиотерапия, под ред. М. Вейса, А. Зембатого, перевод с польского, М.: Медицина, 1986 г. [1]), связанные с методиками кинезиотерапии. К таким методикам следует отнести прежде всего метод Г.Кабата и супругов Боббат, один из основных принципов которого заключается в применении сложного движения, в котором главным считается элемент ротации в сочетании с выполнением движения в косой плоскости, т.к. оно более эффективно воздействует на активизацию пораженных мышц через максимальное участие мышц, суставов и связок в заданном образце движения, обеспечивает максимальное усиление паретичных мышц при восстановлении нарушенных двигательных функций [1, стр. 359]. Этот метод нашел широкое применение в практике реабилитации, поскольку в жизни большая часть движений, требующих усиления, совершается по диагональной траектории (метание диска, рубка дров и т.д.).
Как известно, движениями в косой плоскости (диагональными двигательными моделями) является такая комбинация движения, которая включает несколько суставов одновременно и три компонента движений: флексию или экстензию, абдукцию или аддукцию и внешнюю или внутреннюю ротацию. Для каждой из главных частей тела: головы или туловища, верхних и нижних конечностей - имеются перекрещивающиеся диагонали движения, каждая из которых включает по две противоположные модели движения. Эти модели предоставляют весьма благоприятные возможности мыщцам для их перехода из исходного удлиненного положения к точке максимального укорочения [1].
Известно, что для пациентов с дисфункцией центральной нервной системы в процессах стабилизации и контролируемой мобильности туловища и конечностей следует делать акцент на флексию, экстензию, ротацию в диагональной комбинации этих движений (см. В.А. Исанова, Кинезиотерапия в реабилитации неврологических больных с двигательными нарушениями, Казань, 1996 г. [2], стр. 30). Сочетание нескольких движений согласуется и с принципами биомеханики ([2] , стр. 54). Так для нижних конечностей движения отрабатываются по двум диагоналям, у каждой по одному виду флексии и экстензии: флексия, аддукция, внешняя ротация - экстензия, абдукция, внутренняя ротация ([2], стр. 60). При тренировке проксимальных отделов нижних конечностей и мышц тазобедренного сустава имеют место следующие проксимальные компоненты движения в унилатеральных моделях образцов движения:
1. флексия - абдукция - внутренняя ротация для мышц тазобедренного сустава с одновременной дорсальной флексией и внешней ротацией голеностопного сустава при экстензии пальцев стоп;
2. экстензия, аддукция, внешняя ротация в тазобедренном и коленном суставе; плантарная флексия и инверсия в голеностопном суставе, флексия - пальцы стоп.
Ддя верхних конечностей, туловища, головы и шеи также существуют свои унилатеральные модели образцов движения (см., например, [2], стр. 54).
Наиболее близким аналогом является способ реабилитации неврологических больных с нарушенными двигательными функциями, включающий проведение упражнений по диагональному образцу движения, например, для нижних конечностей с элементами движения флексия или экстензия, аддукция или абдукция, внешняя или внутренняя ротация, с участием группы мышц (см. [2], стр. 60).
Будучи высокоэффективным, способ нашел широкое применение в лечебной практике реабилитации больных, тем не менее при высокой степени поражения мышц требуется длительное, месяцами и годами, проведение указанных упражнений, сроки реабилитации затягиваются, время реабилитации и привлечения больных к активной жизни длительно, стоимость реабилитации очень высока, немаловажными остаются и проблемы социального плана.
Задачей изобретения является повышение эффективности упражнений, сокращение сроков реабилитации неврологических больных с двигательными нарушениями путем усиления проприцепции пораженных мышц нижних и/или верхних конечностей, и/или туловища, и/или головы и шеи.
Задача решается в известном способе реабилитации неврологических больных с поражением мышц двигательного аппарата, включающем проведение сложных упражнений по диагональному образцу движения, с элементами движения флексия или экстензия, аддукция или абдукция, внешняя или внутренняя ротация, с участием большого количества мышц, с выделением ключевой мышцы для данного образца движения, являющейся ведущей для других мышц-сгибателей в данном образце движения. Это, как правило, ослабленная мышца, но способная к небольшому сокращению, для которой может быть установлен высокий порог на сокращение, воздействующая при своем сокращении на все суставы, принимающие участие в данном образце движения, обеспечивающей сокращение других мышц и от которой зависит выполнение в целом заданного образца движения; в процессе проведения упражнений на двигательную точку ключевой мышцы накладывают электрод аппарата биообратной связи.
Для нижних конечностей задача решается в известном способе реабилитации неврологических больных с поражением мышц двигательного аппарата, включающем проведение упражнений по диагональному образцу движения, например, включающего флексию, абдукцию, внутреннюю ротацию в тазобедренном суставе; дорсальную флексию и внешнюю ротацию в голеностопном суставе; экстензию пальцев стоп, в котором участвуют мощная четырехглавая мышца бедра, при своем сокращении воздействующая на два сустава (сгибает бедро в тазобедренном суставе и разгибает голень в коленном суставе), подвздошно-поясничная мышца и другие; в процессе проведения упражнения на двигательную точку четырехглавой мышцы бедра накладывают электрод аппарата биообратной связи.
В другом образце движения для нижних конечностей, предполагающем проведение физических упражнений в унилатеральной модели диагонального образца движения, включающего экстенсию, аддукцию, внешнюю ротацию в тазобедренном суставе; плантарную флексию и инверсию, внешнюю ротацию в голеностопном суставе; флексию пальцев стоп, в котором участвуют мышцы: двуглавая мышца бедра, полусухожильная, большая и средняя ягодичные мышцы, некоторые другие, в процессе проведения упражнения на двигательную точку двуглавой мышцы бедра накладывают электрод аппарата биообратной связи для ускорения активного сокращения паретичных мышц, участвующих в данном образце движения.
Для верхних конечностей при флексии задействована следующая группа мышц: передняя зубчатая, надосная, малая круглая, дельтовидная; при этом образце движения ключевой будет дельтовидная мышца, на которую и надо приложить электрод биообратной связи. При экстензии работают трехглавая мышца, подосная; ключевой является трехглавая мышца.
Для туловища при флексии работают грудино-ключично-сосцевидная, лестничная длинная мышца головы и шеи, прямая мышца живота, косая мышца живота, подвздошно-поясничная. Ключевой в данном образце движения будет прямая мышца живота.
Для туловища при экстензии работают трапецевидная, задняя зубчатая, крестовоостистая, поперечно-остистая, короткая мышца спины, межпоперечная, межостистая, подниматели ребер, группа затылочно-подвздошных мышц, и ключевой будет задняя зубчатая мышца.
При вращении туловища работают наружно-косая совместно с внутренней косой мыщцы, подвздошно-поясничная, которая является ключевой.
При сгибании туловища работают длинная мышца головы, косая мышца живота, прямая мышца живота, подвздошно-поясничная, ключевой является прямая мышца живота. При подключении электрода к ключевой мышце в том или ином образце движения в процессе проведения упражнения включается дополнительная обратная связь афферентации, обеспечивается активность на сокращение ключевых мышц; в свою очередь мышцы-синергисты, участвующие в данном образце движения (например, для нижних конечностей подвздошно-поясничная, мышца, напрягающая широкую фасцию бедра), активизируют паретичные мышцы, на которые электрод не накладывается, усиливают проприоцептивную реакцию этих мышц на сокращение, способствуют активному сокращению мышечных волокон всех задействованных в движении мышц.
Топография двигательных точек - точек максимального напряжения мышц при их сокращении - известна (см. Физиотерапевтический справочник под ред. И.Н. Сосина, издательство "Здоровье", Киев, 1973 г., стр. 35 [3]).
Определение ключевой мышцы для данного образца движения может быть проведено по известным схемам (см. Ф.А. Хабиров, Р.А. Хабиров, Мышечная боль, Казань, 1995 г., изд. Книжный Дом, стр. 46 [4]). В качестве сигнала биообратной связи может быть использован световой, звуковой сигналы либо иные сенсорные и мотивационно-эмоциональные сигналы, воспринимаемые больными с сохранными функциями анализаторов.
В результате реализации вариантов описанных образцов движения с использованием биообратной связи увеличивается число двигательных единиц всех мышц, участвующих в сокращении, количество активных мышц возрастает за счет активности мышечных волокон всех мышц, участвующих в упражнении, что приводит к восстановлению двигательных функций в более короткие сроки. Зарождение нервного возбуждения во всех паретичных мышцах и его проведение к центрам нервной системы, ответственным за движение, в свою очередь активизирует альфа-гамма-мотонейроны в передних рогах спинного мозга импульсами со стороны вышестоящих нервных формаций центральной нервной системы. Все это способствует усилению сократительной способности мышечных волокон пораженных мышц, резко сокращает время восстановления их двигательной активности.
Известно использование сигналов системы биообратной связи для управления функциями мышц, например для восстановления мышечно-суставного чувства и повышения сократительной способности мышц (см., например, Эпектромиографический аппарат биологической обратной связи "Миотоник-БП", Руководство по эксплуатации. "Биосвязь", Санкт-Петербург [5] ). Описанные в [5] методики управления функциями мышц используют звуковые сигналы обратной связи, по громкости соответствующие силе мышечного сокращения. Больной запоминает ощущение мышечного сокращения, соответствующего уровню громкости сигнала, услышанного им, и впоследствии уже без сигнала старается повторить это ощущение. Принцип действия сигнала биообратной связи в предлагаемом способе тот же, что и в известном [5], однако в предлагаемом способе электрод накладывают на двигательную точку ключевой мышцы, обеспечивающей сокращение других мышц и от которой зависит выполнение в целом заданного образца движения унилатеральной модели. Работая в комплексе (системе), все мышцы, участвующие в упражнении, начинают активизировать свою деятельность и восстанавливать способность совершать сложные диагональные жизненно важные движения. При этом больной по силе звукового сигнала запоминает не только силу мышечных сокращений, но и размах сложного движения. Использование "метода в методе", то есть метода биообратной связи в методе преприоцептивного облегчения, стимулирует получение более высоких результатов последнего.
Упражнения проводятся следующим образом. Исходное положение выбирается в зависимости от состояния и степени сохранности у больных супраспинального двигательного контроля. Для поэтапного восстановления мышечной силы или инициации движения необходима иррадиация импульсов из сильных групп мышц в паретические, что и обеспечивается сложным движением с участием сильных и слабых мышц одновременно. На начальной стадии лечения больных с тетрапарезом оптимальной является поза лежа на спине.
Основные принципы кинезиотерапии предполагают управление руками методиста (мануальный контакт) всеми движениями со сферами контроля движения и позы. Для упражнений, направленных на восстановление сократительной способности мышц, используются приемы от проксимальных отделов к дистальным с мануальным контактом на дистальные суставы.
При упражнении в соответствии с первым образцом движения для нижних конечностей электрод аппарата "Миотоник-БП" накладывают на двигательную точку четырехглавой мышцы бедра, по второму образцу движения - на двухглавую мышцу бедра в соответствии с топографией двигательных точек [3]. Движения совершаются, например, по описанной для нижних конечностей схеме:
1. Флексия - абдукция - внутренняя ротация в тазобедренном суставе; дорсальная флексия и внешняя ротация в голеностопном суставе; зкстензия - пальцы стопы; мануальный контакт - колено - голеностопный сустав.
2. Экстензия, аддукция, внешняя ротация в тазобедренном и коленном суставе; плантарная флексия и инверсия в голеностопном суставе, флексия - пальцы стопы; мануальный контакт - голеностопный сустав - колено.
Упражнения проводятся медленно и в координации, т.е. движения должны происходить одновременно в нескольких плоскостях, в которых последовательные его элементы на заданное движение накладываются друг на друга. В первом образце движения в начале движения исходное положение лежа; нижние конечности расположены вдоль туловища; затем паретичную конечность с помощью методиста и по возможности при активном участии больного начинают поднимать, отрывая от плоскости, и осуществлять флексию в тазобедренном суставе; далее начинают постепенно осуществлять движение приведения с переходом на ротацию с конечным элементом дорсальной флексии голеностопного сустава с мануальным контактом голеностопного сустава. Движения осуществляются с достаточным встречным сопротивлением за счет обеспечения мануального контакта и силы тяжести мышц нижних конечностей. При этом воздействие на мышцы методист соизмеряет в зависимости от их состояния и функциональной активности, избегая режима растяжения для слабых мышц (например, путем их поддержания с изменением угла флексии и ротации), давая длительное растяжение сильным мышцам (как по времени растяжения, так и углом флексии в тазобедренном суставе; чем больше угол, тем больше растяжение). Аналогично проводятся упражнения и для других образцов движения.
Упражнения проводятся при наложении электрода биообратной связи на двигательную точку ключевой для данного образца движения мышцы при включенном аппарате биообратной связи в пороговом режиме, установленном в соответствии с [5] , при этом усиление сигнала и положение пороговых отметок определяются сократительной способностью мышцы приложения электрода, возможностью совершать упражнение. Первоначальный пороговый уровень может быть установлен на отметке 8-10. Упражнения проводятся с многократным повторением по принципу становления временных связей, при этом повторное возбуждение по проводящему пути нервной системы облегчает нервно-мышечную проводимость, так как уменьшается его синаптическое сопротивление. С помощью биологической обратной связи больному подается информация о состоянии тех или иных физиологических процессов с целью "обучения" сознательному управлению этими функциями. По мере увеличения объема движения и самостоятельности больного его совершать пороговый уровень в процессе проведения последующих упражнений можно уменьшить, смещая пороговые отметки, уменьшая усиление сигнала интегрированной электромиограммы. Уменьшение порога до 4-2 означает способность больного совершать тренировочные упражнения самостоятельно.
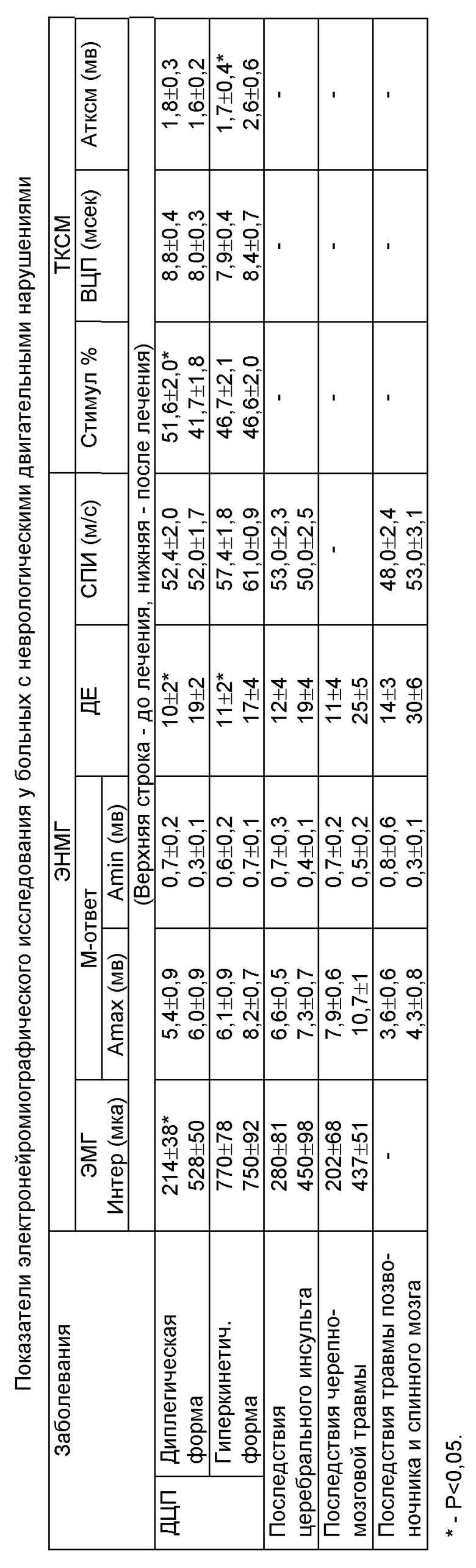
Электромиографическое обследование больных свидетельствует о существенной положительной динамике биоэлектрической активности во всех исследованиях (272 наблюдения). Амплитуда ЭМГ при максимальном произвольном усилии однозначно увеличивалось у больных детским церебральным параличом от 214,7+38,5 мкВ до 528,5+50,1 мкВ; у больных с последствиями церебрального инсульта с 280,0+81,0 мкВ до 450,0+98,0 мкВ; у больных с черепно-мозговой травмой от 202,3+38,0 мкВ до 370,0+51,0 мкВ; у больных с травмой спинного мозга с 121,0+54,0 мкВ до 312,0+78,0 мкВ.
Динамика параметров электронейромиографии характеризовалась достоверным увеличением количества двигательных единиц, что указывало на наклонность к нормализации двигательных функций (см. таблицу) В тонических пробах на отдаленную синергию, по данным анализа интерференционной ЭМГ, в паретичных мышцах больных, перенесших церебральный инсульт и травму спинного мозга, амплитуда колебаний увеличивалась, а в спастических мышцах уменьшилась. В результате лечения у больных с диплегической формой детского церебрального паралича имелась наклонность к увеличению Н-рефпекса в n.soleus; Н-рефлекс регистрировался также в мышцах стоп и кисти. При этом время восстановления движений у больных, прошедших реабилитацию по предлагаемому способу, сокращалось.
Источники информации
1. Физиотерапия, под ред. М.Вейса, А.Зембатого, перевод с польского, М.: Медицина, 1986 г.
2. В.А.Исанова, Кинезиотерапия в реабилитации неврологических больных с двигательными нарушениями, Казань, 1996 г. - прототип).
3. Физиотерапевтический справочник под ред. И.Н.Сосина, издательство "Здоровье", Киев, 1973 г., стр. 35 [3].
4. Ф. А. Хабиров, Р. А. Хабиров, Мышечная боль, Казань, 1995 г., изд. Книжный Дом, стр. 46.
5. Электромиографический аппарат биологической обратной связи "Миотоник-БП", Руководство по эксплуатации, "Биосвязь", Санкт-Петербург.
Изобретение относится к медицине, а именно к неврологии с кондуктивной терапией, в частности кинезиотерапии неврологических больных с двигательными нарушениями. Способ включает проведение сложных упражнений по диагональному образцу движения с участием группы мышц, с выделением ключевой мышцы для данного образца движения, которая является ведущей для других мышц-сгибателей в данном образце движения; в процессе проведения упражнений на двигательную точку ключевой мышцы накладывают электрод аппарата биообратной связи. Способ позволяет повысить эффективность упражнений, сократить сроки реабилитации больных. 1 з.п.ф-лы, 1 табл.
| ИСАНОВА В.А | |||
| Кинезиотерапия в реабилитации неврологических больных с двигательными нарушениями | |||
| - Казань, 1996, с.60 | |||
| СПОСОБ КОРРЕКЦИИ НЕРВНО-ПСИХИЧЕСКИХ ЗАБОЛЕВАНИЙ, СОПРОВОЖДАЮЩИХСЯ ДВИГАТЕЛЬНЫМИ НАРУШЕНИЯМИ | 1997 |
|
RU2122443C1 |
| ХАБИРОВ Ф.А., ХАБИРОВ Р.А | |||
| Мышечная боль | |||
| - Казань, Книжный дом, 1995, с.61. | |||

