Изобретение относится к контрольно-измерительной технике, применяемой для транспортных средств, в частности для тягачей, буксиров, и может применяться, преимущественно, на железнодорожном транспорте для локомотивов.
Известны приборы многопараметрического контроля режимов технологических процессов и перемещений, например, "Система контроля режима движения локомотива" по авторскому свидетельству СССР 945877 от 23.03.82 г.
За прототип принято "Устройство для регистрации работы транспортного средства" по авторскому свидетельству СССР 1142853 от 28.02.85 г.
Устройство содержит датчики пути и топлива, счетчики, генератор импульсов, коммутатор, блок регистрации и элементы обработки измеренных параметров.
Недостатком известных устройств является косвенная оценка особенностей трассы перемещения транспортного средства.
Цель изобретения состоит в повышении точности нормирования расхода энергетического ресурса, преобразуемого в тяговое усилие.
Суть изобретения заключается в нормировании расхода энергетического ресурса при отслеживании и учете баланса сил тяги и сопротивления перемещению с приведением текущих параметров, характеризующих сложность трассы.
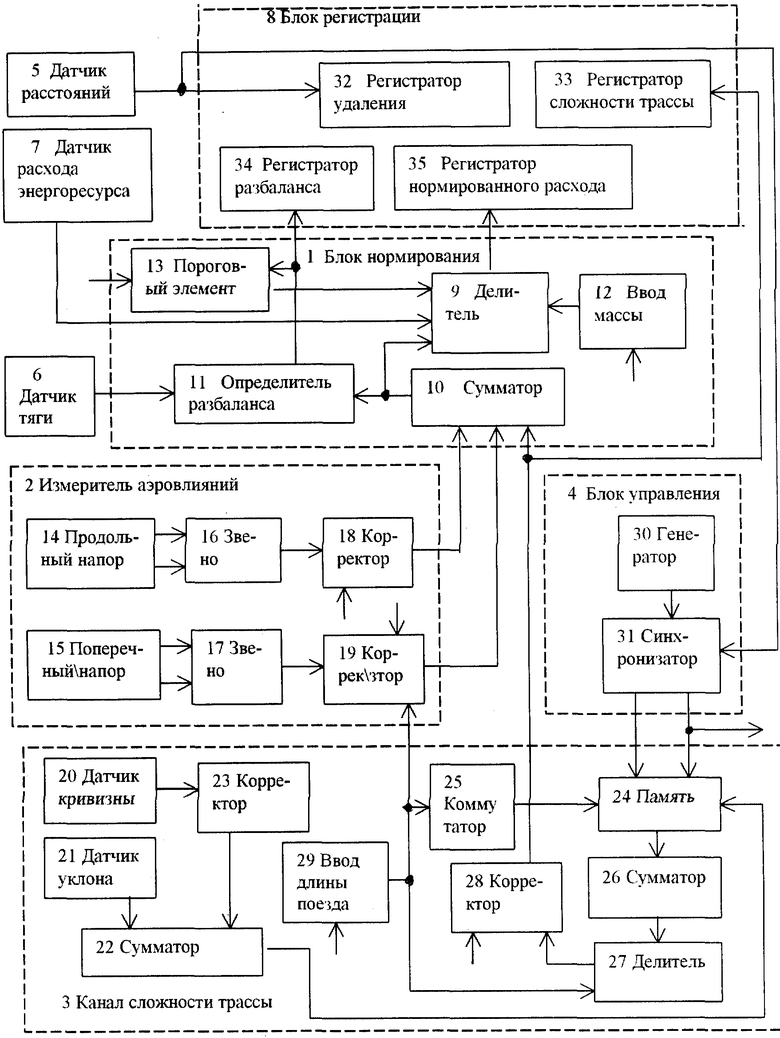
На чертеже приведена блок-схема анализатора.
Анализатор режимов тягового средства имеет блок балансного нормирования 1, продольно-поперечный измеритель аэровлияний 2, канал приведения текущей сложности трассы 3, блок управления 4, датчики: расстояния 5, тяги 6 и расхода энергоресурса 7 и блок регистрации 8. К первому входу блока балансного нормирования 1 подсоединен датчик расхода энергоресурса 7 и ко второму его входу подсоединен датчик тяги 6. К третьему и четвертому входам подсоединен продольно-поперечный измеритель аэровлияний 2. К пятому входу блока балансного нормирования 1 подсоединен первый выход канала приведения текущей сложности трассы 3. Первый и второй выходы блока балансного нормирования 1 подсоединены к соответственным входам блока регистрации 8. К третьему входу блока регистрации 8 параллельно подсоединен первый выход канала приведения текущей сложности трассы 3. К четвертому его входу подсоединен датчик расстояния 5. Выход датчика расстояния 5 параллельно подсоединен к блоку управления 4, два выхода которого подсоединены к каналу приведения текущей сложности трассы 3. Кроме того, второй выход канала приведения текущей сложности трассы 3 подсоединен к продольно-поперечному измерителю аэровлияний 2.
Блок балансного нормирования 1 имеет управляемый двухкаскадный делитель 9, выход второго каскада которого является вторым выходом блока 1. Входом делимого первого каскада является первый вход блока 1. Вход делителя первого каскада соединен с выходом сумматора 10, который параллельно подключен к входу определителя разбаланса 11, например, уменьшаемого. Входом второго каскада делителя является выход управляемого счетчика ввода массы подвижных единиц (поезда) 12. При этом, выход первого каскада подключен к входу делимого второго каскада делителя. Управляющий вход двухкаскадного делителя 9 соединен с выходом управляемого порогового элемента 13. Вход определителя разбаланса 11 является вторым входом блока балансного нормирования 1, а его выход является первым выходом блока и параллельно подключен к входу порогового элемента 13.
Продольно-поперечный измеритель аэровлияний 2 имеет датчик продольного напора воздуха 14 и датчик поперечного ветрового напора 15, каждый из которых снабжен двумя выходами, подключенными через развязывающие звенья 16 и 17 с отдельными управляемыми корректорами 18 и 19 к соответствующим выходам продольно-поперечного измерителя аэровлияний 2. Выходы датчиков 14 и 15 объединены посредством развязывающих звеньев 16 и 17, выполненных, например, в виде пары диодов. Корректоры 18 и 19 выполнены в виде умножителей, одним из сомножителей которых является измеренная величина, а вторым - вводимый на основе практики поправочный коэффициент. Один из корректоров, в частности включенный после датчика поперечного ветрового напора 15, выполнен двухкаскадным, третьим сомножителем которого является величина, пропорциональная длине поезда. Третий вход корректора 19 является входом продольно-поперечного измерителя аэровлияний 2. Датчики напора 14 и 15 установлены на тяговом средстве ортогонально и выполнены аналогично, например, в виде электрогенераторов, снабженных турбинными приводами.
Канал приведения текущей сложности трассы 3 снабжен датчиком кривизны 20 и датчиком уклона 21. Один из них подключен к сумматору 22 непосредственно, а другой, например кривизны, подключен через управляемый корректор 23. Корректор 23, как и другие, является умножителем, который обеспечивает сопоставимость величин. Датчики 20 и 21 являются составными частями гироскопа и установлены на тяговом средстве. Знак уклона передается в оперативную память 24 непосредственно, а абсолютные величины указанных параметров заносятся в оперативную память 24 после суммирования. Отсчеты очередных значений и операции приведения синхронизированы блоком управления 4. Оперативная память 24 снабжена множеством регистров, соединенных между собой по схеме сдвига информации, ту или иную часть из которых возможно подключать к информационному входу. Множество регистров, то есть емкость введенной в действие памяти, предварительно ограничивается через подключающий вход коммутатором 25 при сохранении схемы сдвига информации. Каждый регистр снабжен, кроме того, командным входом "сдвиг данных" и входом "считывание", которые являются управляемыми входами канала.
Выходы регистров 24 подключены через сумматор 26 к входу делимого делителя 27. Его выход соединен через корректор 28 с блоками 1 и 8. Вход коммутатора 25 соединен с управляемым счетчиком ввода длины поезда 29, который, кроме того, соединен параллельно с входом делителя 27 и продольно-поперечным измерителем аэровлияний 2.
Блок управления 4 снабжен генератором 30, соединенным с синхронизатором 31, управляющий вход которого является входом блока 4. Синхронизатор 31 имеет два выхода импульсов: четных и нечетных, которые являются выходами блока 4. Выход четных импульсов параллельно подключен ко всем блокам и каналам анализатора, в частности к датчикам 5, 6 и 7, 14 и 15, датчикам 20 и 21, сумматорам 10, 22 и 26, делителям 9 и 27 (эти структурные связи на чертеже не показаны).
Блок регистрации 8 имеет регистратор удаления 32, соединенный с датчиком расстояния 5, регистратор приведенной сложности трассы 33, соединенный с каналом 3, регистратор разбаланса 34 и регистратор нормированного расхода 35, соединенные с блоком 1.
Анализатор предусматривает непосредственное измерение нагрузки тягового средства датчиком тяги 6, например, динамометрическим. Датчик тяги 6 представляет измерения полного сопротивления перемещению подвижных единиц, то есть состава поезда, в единицах, пропорциональных энергоресурсу, например киловаттах. Выход датчика тяги 6 подключен к входу вычитаемого определителя разбаланса 11.
Полное сопротивление перемещению в данном случае рассматривается как суммарное влияние ветровой нагрузки и рельефа трассы следования, то есть уклонов и кривизны пути.
Ветровая нагрузка имеет в общем случае продольную встречную или попутную и поперечные составляющие.
Датчик продольного напора 14 снабжен двумя выходами: встречного и попутного направлений. Возможное противоположное влияние учитывается при анализе. Встречный напор увеличивает сопротивление движению, а попутный - уменьшает.
Датчики напора 14 и 15 передают измеренные переменные сигналы через сумматор 10 на вход уменьшаемого упомянутого определителя разбаланса 11, например вычитателя.
При повороте локомотива и, следовательно, части вагонов относительно направления ветра сопротивление колесных пар о рельсы возрастает и наоборот. Выход датчика кривизны 20 выдает изменяющиеся сигналы через свой корректор 23 на входы сумматора 22.
Превышение баланса суммой параметров полного сопротивления перемещению указывает на функционирование элементов измерения и преобразования и соответствует некоторой неадекватности учета параметров (в основном ветрового воздействия).
Это остаточное значение разбаланса посредством регулировок корректоров должно быть незначительным, регистрируется непрерывно и используется для управления регистрацией и дальнейшего анализа.
На "выбеге" и на уклоне датчик тяги фиксирует незначительные или нулевые значения. Следовательно, величина разбаланса резко возрастает.
При тяговых режимах естественно отмечается наличие незначительного разбаланса, то есть превышение тяги над сопротивлением перемещению.
Уровень допустимого незначительного разбаланса настраивается по практическим данным и отслеживается пороговым элементом 13, который разрешает или запрещает деление величины расхода энергоресурса на измеренное полное сопротивление перемещению, то есть происходит нормирование расхода.
Нормирование расхода выполняется только на основных режимах, то есть при тяге. При движении на "выбеге" по инерции или на спусках за счет кинетической энергии расход не нормируется, так как пороговый элемент запрещает деление измеренных величин. Нормативные данные в этом случае могут быть получены статистически.
Сопротивления перемещению по трассе учитываются благодаря измерениям отклонений трассы, выполненных, например, гироскопом, который снабжен датчиками: подъемов, спусков, то есть уклона 21, и поворотов трассы, то есть кривизны 20.
Отклонения трассы вправо или влево увеличивают продольную составляющую сопротивления перемещению, что учтено их суммированием перед вводом в оперативную память 24.
Оперативная память 24 канала текущей сложности трассы через подключающий вход настраивается на фактическую длину поезда путем переключения коммутатором 25 количества задействованных в ней регистров для хранения периодических отсчетов.
Все виды измерений анализатора режимов синхронизированы и выполняются периодически по командам от датчика расстояния 5 через блок управления 4
Допустим (при использовании на железных дорогах), что датчик расстояния 5 выдает один импульс каждым оборотом колеса, то есть примерно через 2,5 м. На 10 м трассы получится 4 отсчета.
Поезд, отправленный на перегон, имеет каждый раз конкретную длину в несколько сот метров, и она может быть представлена кратным числом импульсов.
При длине поезда 1000 м будет 400 отсчетов. Тогда при некотором запасе следует суммировать 400-600 величин параметров сложности трассы, что требует соответствующего количества регистров в оперативной памяти 24 и сумматоре 26. При современных миниатюризации и быстродействии упомянутые конструктивные условия не проблематичны.
Датчики кривизны 20 и уклона 21 с каждым импульсом синхронизации производят отсчеты величин по трассе. Поскольку участки трассы, например уклонов, зачастую длиннее 2,5 м, то каждый уклон или кривая отразятся в оперативной памяти анализатора многократно. Усреднение нескольких сот отсчетов (по числу импульсов, соответствующих длине поезда) фактически равнозначно текущей аппроксимации профиля и плана трассы, занимаемых поездом в последовательные периоды перемещения.
Оперативная память 24 канала текущей сложности трассы синхронно обновляется. Последующий отсчет вносится в первый регистр оперативной памяти 24 в качестве очередного члена суммы, а в последнем ее регистре значение обнуляется и затем в него вносится смежный последующий отсчет из соседнего регистра.
Значения уклонов (подъемов и спусков) и кривизны, на которых находится поезд, заносятся и стираются в оперативной памяти канала 3 периодически.
Изменения содержания регистров выполняются, например, поочередно после суммирования последнего отсчета со всеми предыдущими. Цикл изменений заканчивается обнулением первого регистра до момента очередного отсчета.
Каждый цикл позволяет многократно иметь в процессе управления значения сопротивления перемещению, приведенные к длине поезда.
Импульсы синхронизации являются управляющей средой аппроксимирования в канале текущей сложности трассы 3.
Значение длины конкретного поезда вносится в счетчик ввода его длины 29 в виде числа импульсов и при аппроксимации вводится в делитель 27 канала текущей сложности трассы и коммутатор 25.
Коммутатор 25 через подключающий вход вводит в действие некоторую часть регистров от общей максимальной емкости памяти соответственно введенному значению длины поезда, подбирая конкретную емкость оперативной памяти 24. Кроме того, значение длины конкретного поезда вносится в корректор 19 поперечного напора продольно-поперечного измерителя аэровлияний 2 в качестве сомножителя. Поскольку измеренное значение поперечного напора по сути является удельной величиной, то полное усилие влияния ветра зависит от конкретного размера боковой поверхности поезда, что учитывается настройкой соответствующего корректора 19.
Анализатор режимов транспортного средства синхронно с измерениями регистрирует:
- длину пройденной трассы, то есть удаление,
- сложность трассы, приведенную к длине поезда,
- последовательные значения разбаланса между тягой и сопротивлением перемещению,
- нормированный расход энергоресурса, затраченного непосредственно на тяговых режимах, с учетом сложности трассы и массы поезда.
Из анализа исключены изменчивые и случайные климатические влияния, что повышает их объективность и сопоставимость с другими вариантами вождения по той же трассе.
Такой анализ позволяет сравнить субъективные особенности вождения транспортных средств (поездов) водителями (машинистами) и выработать необходимые рекомендации в целях экономии ресурсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ВИБРОДИАГНОСТИКИ РОТОРНЫХ МЕХАНИЗМОВ | 1999 |
|
RU2153660C1 |
| ИЗМЕРИТЕЛЬ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА В ДИЗЕЛЬ | 2002 |
|
RU2211364C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ ЦИКЛИЧЕСКИ ФУНКЦИОНИРУЮЩИХ ОБЪЕКТОВ | 2000 |
|
RU2177607C1 |
| ПУТЕВОЙ ИНСТРУМЕНТ | 1999 |
|
RU2176001C2 |
| ИЗМЕРИТЕЛЬ УГЛА ОПЕРЕЖЕНИЯ ВПРЫСКА ТОПЛИВА В ДИЗЕЛЬ | 2003 |
|
RU2241138C2 |
| МНОГОКАНАЛЬНЫЙ ДЕФЕКТОСКОП | 2001 |
|
RU2194273C1 |
| СПОСОБ НАСТРОЙКИ ТЯГОВОГО ТЕПЛОЭЛЕКТРИЧЕСКОГО АГРЕГАТА | 2000 |
|
RU2177608C1 |
| ИЗМЕРИТЕЛЬ СОПРОТИВЛЕНИЙ | 2002 |
|
RU2221254C2 |
| ИЗМЕРИТЕЛЬ ИЗНОСА РЕЛЬСА | 2001 |
|
RU2195524C2 |
| ТРЕХКООРДИНАТНЫЙ ПРИВОД | 2001 |
|
RU2239906C2 |
Изобретение относится к контрольно-измерительной технике, применяемой для транспортных средств, в частности для тягачей, буксиров, может применяться, преимущественно, на железнодорожном транспорте для локомотивов. Техническим результатом является повышение точности нормирования расхода энергетического ресурса, преобразуемого в тяговое усилие. Анализатор предназначен для нормирования расхода энергетического ресурса при отслеживании и учете баланса сил тяги и сопротивления перемещению с приведением текущих параметров, характеризующих сложность трассы. Анализатор режимов тягового средства имеет блок балансного нормирования, продольно-поперечный измеритель аэровлияний, канал приведения текущей сложности трассы с гироскопом, блок управления, датчики расстояния, тяги и расхода энергоресурса и блок регистрации. Нормирование расхода выполняется только на основных режимах, то есть при тяге. 6 з.п.ф-лы, 1 ил.
| Устройство для регистрации работы транспортного средства | 1983 |
|
SU1142853A1 |
| WO 00/07150 A1, 10.02.2000 | |||
| Электрофотографический материал | 1981 |
|
SU989525A1 |
| СПОСОБ СНИЖЕНИЯ КОНЦЕНТРАЦИИ ТОКСИЧЕСКИХ АРОМАТОВ В УГЛЕВОДОРОДНОЙ СМЕСИ | 1996 |
|
RU2136644C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2107946C1 |

