Трехкоординатный привод предназначен для дистанционного создания силового воздействия на несколько объектов, сосредоточенных в ограниченном пространстве, например при управлении оболочкой, моделирующей и формирующей конфигурацию рельефов при натуризации (воссоздании макетов) числовых массивов. Кроме того, привод пригоден для управления множеством электромеханических переключателей силовых цепей, в частности, при управлении индивидуальными секциями багажных, контейнерных, сортировочных, банковских накопителей и гостиниц.
Известны гидромеханические системы распределенной штамповки крупногабаритных листовых изделий посредством приведения в действие гидроцилиндров, размещенных ортогонально плоскости по заданному закону.
За прототип принято устройство для передачи силового воздействия (авторское свидетельство СССР №326675, Н 01 r 15/00), имеющее в своем составе несколько электромоторов, реечную кинематическую передачу, снабженную множеством элементов сцепления, и продольно смещаемые параллельные между собой исполнительные резьбовые стойки, сочлененные с гайками, вращаемыми системой шестерен.
Целью изобретения является увеличение быстродействия устройства трехкоординатного устойчивого состояния и комфортности за счет снижения шума при его работе.
Суть изобретения заключена в снабжении привода системой независимого доступа к любой его исполнительной резьбовой стойке. При этом каждая стойка снабжена электромагнитным барабаном, который взаимодействует с тяговой лентой. Тяговая лента охватывает электромагнитные барабаны и шаговый реверсивный двигатель. Включение любого из электромагнитных барабанов осуществлено по матричной схеме.
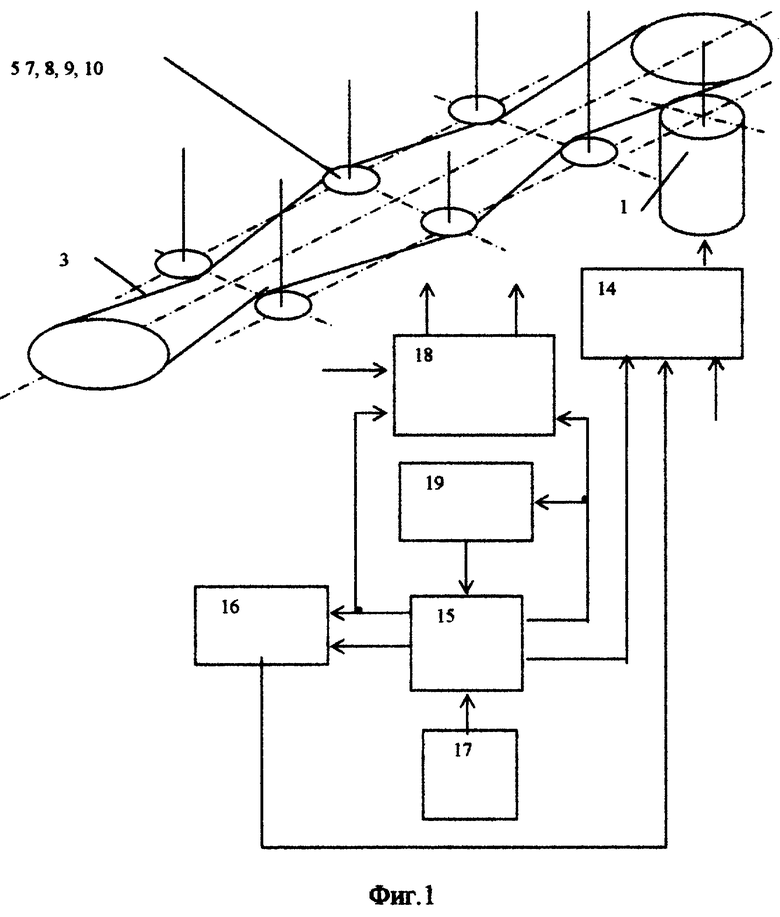
На фиг.1 условно изображена часть кинематической схемы трехкоординатного привода, то есть две шеренги и три ряда в рабочей зоне и электрические блоки его управления.
На фиг.2 приведена функциональная электрическая схема. Двигатели трехкоординатного привода выполнены шаговыми и реверсивными.
Каждый из шаговых реверсивных двигателей 1 привода снабжен ведущим роликом 2. Количество шаговых реверсивных двигателей выбрано меньшим, чем количество шеренг в рабочей зоне привода.
Кинематическая передача выполнена в виде петли тяговой ленты 3. Рационально одной тяговой лентой 3 объединять четыре-пять шеренг при десятке рядов (на схеме изображен один двигатель на две шеренги). Ведущий ролик 2 жестко закреплен на валу шагового реверсивного двигателя и охвачен петлей тяговой ленты 3. Тяговая лента выполнена из гибкого материала, например, на резинотканевой или капроновой основе, насыщенного частицами из магнитомягкого вещества.
Петля тяговой ленты проходит вокруг электромагнитных барабанов 4 и 5 двух соседних шеренг (нечетных и четных) и ролик натяжения 6.
Электромагнитные барабаны и ролики на фиг.1 представлены эллипсами. Каждый электромагнитный барабан снабжен электромагнитом 7 с полюсными наконечниками 8 и 9 и гильзой 10 с внутренней резьбой в виде гайки. Все электромагнитные барабаны 4 и 5 выполнены одинаковыми. Гильза 10 выполнена из магнитомягкого материала. Гильза по торцам снабжена полюсными наконечниками, являющимися одновременно опорами скольжения и электрическими контактами для обмотки электромагнита. Обмотка электромагнита 7 уложена поверх гильзы. Полюсные наконечники 8 и 9 имеют форму короны и электрически изолированы от гильз исполнительных резьбовых стоек. Лучи корон направлены вдоль образующих электромагнитного барабана и размещены с чередованием. Детали электромагнитных барабанов собраны посредством внешней оболочки, выполненной из пластика (простота конструкции барабанов не требует графического изображения).
Роль элементов сцепления выполняют электромагнитные барабаны с множеством параллельно размещенных исполнительных резьбовых стоек 11. Гильзы 10 внутренней резьбой сопряжены с исполнительными резьбовыми стойками 11, которые зафиксированы от вращения, но имеют возможность продольного перемещения, например, продольной лыской и общей для всех исполнительных резьбовых стоек ограничительной пластиной с соответствующими фасонными отверстиями.
Обмотка каждого электромагнитного барабана, имеющего по торцам полюсные наконечники 8 и 9 за счет электрических контактов, разными выводами обособленно подключена к наборам координатных шин: рядов 12 и шеренг 13, которые в параллельных плоскостях ориентированы ортогонально. Так обмотки одной из шеренг одними выводами контактируют с общей для них шиной 13 одного из координатных направлений, но другие (противоположные) выводы их введены в контакт с разными шинами рядов 12, то есть другого координатного направления, что аналогично матричным схемам. Полюсные наконечники контактными опорами установлены в гнездах шин с возможностью скольжения.
Каждый шаговый реверсивный двигатель 1 подключен выводами к блоку реверсивного управления 14.
Возможны различные варианты построения автоматической системы управления предлагаемым приводом, основанные на широко известных принципах. В простейшем варианте предусмотрено полуавтоматическое управление с ручным вводом данных.
Групповой информационный вход блока реверсивного управления 14 соединен с первым выходом четырехпараметрического блока памяти 15, а его групповой управляющий вход соединен с выходом блока коррекции 16.
Четырехпараметрический блок памяти 15 соединен своим групповым входом с блоком ввода 17, всей второй группой выходов - с одной из групп управляющих входов координатного распределителя 18 и параллельно подгруппой четных выходов второй группы - с первым групповым входом блока коррекции 16, третьим групповым выходом - с вторым групповым входом блока коррекции 16 и четвертым выходом - параллельно с другим групповым управляющим входом координатного распределителя 18 и входом многовходового логического элемента ИЛИ 19. Выход элемента ИЛИ 19 подключен к управляющему входу четырехпараметрического блока памяти 15.
Четырехпараметрический блок памяти 15 имеет память номера рядов 20, память направлений “Вверх и Вниз” 21, память номера шеренг 22 и память величины перепада уровней 23.
Входы четырехпараметрического блока памяти подключены через соответствующие переключатели: 24, 25, 26, 27 блока ввода к своим обособленным кнопкам набора: 28, 29, 30, 31. Переключатель номера ряда имеет количество положений и выводов, равное количеству рядов в каждой шеренге (на схеме показан один групповой вывод). Переключатель направлений имеет два положения (на схеме показаны два вывода). Переключатель номера шеренг имеет количество положений и выводов, равное количеству шеренг в рабочей зоне привода (на схеме условно показано два вывода). Переключатель перепада уровней имеет количество положений и выводов, равное количеству разрядов в регистре величины максимального смещения исполнительной резьбовой стойки (на схеме показан один групповой вывод). Выход регистра памяти перепада уровней 23 является первым выходом, а ее вход считывания является управляющим входом четырехпараметрического блока памяти 15.
Координатный распределитель 18 и блок реверсивного управления 14 подключены параллельно к силовым цепям.
Блок коррекции 16 имеет последовательную цепочку логических элементов ИЛИ 32 и НЕ 33, выходы которых подключены параллельно к управляющим входам двух пар ключей: 34, 35 и 36, 37. Элемент ИЛИ 32 имеет количество входов, равное количеству четных выходов памяти рядов, которые подключены параллельно соответствующим выходам памяти рядов. Выход элемента ИЛИ 32 параллельно подключен к входу элемента НЕ 33 и управляющим входам пары ключей 34 и 35 “перекрестного” соединения с его выходами. Выход элемента НЕ 33 параллельно подключен к управляющим входам пары ключей 36 и 37 “прямого” соединения с его выходами. Основные входы ключей 34 и 36 параллельно подключены к выходу “Вверх” памяти направлений и основные входы ключей 35 и 37 параллельно подключены к его выходу “Вниз”. Выходы памяти направлений 21 являются третьим групповым выходом четырехпараметрического блока памяти 15.
Память шеренг 22 имеет количество ячеек, равное количеству шеренг предлагаемого привода. Групповой выход памяти шеренг 22, являющийся четвертым выходом четырехпараметрического блока памяти 15, соединен со вторыми управляющими входами координатного распределителя 18, которые соединены с управляющими входами силовых ключей коммутатора шеренг, обособленно соединенных с его выходами.
Все выходы памяти рядов 20, являющиеся вторым групповым выходом четырехпараметрического блока памяти 15, подключены согласно номерам к своим силовым ключам коммутатора рядов через его первый управляющий вход. Коммутатор рядов выполнен в виде управляемых силовых ключей, которые включены в цепи шин рядов.
Устройство работает следующим образом.
Каждый из четырех переключателей блока ввода поочередно устанавливается на одну из своих выходных цепей и соответствующей кнопкой набора подается сигнал в требуемую память. Команда направления смещения некоторой исполнительной резьбовой стойки вводится в избранную ячейку памяти 21 по одной из двух цепей. Переключатель направлений устанавливается на одно из положений: “Вверх” или “Вниз”. Затем посредством нажатия соединенной с ним кнопки набора команда запоминается.
Значение величины смещения некоторой исполнительной резьбовой стойки вводится в ячейки регистра памяти перепада уровней 23 поочередным нажатием отдельной кнопки набора через переключатель “Изменение уровня”.
Ввод команды в избранную ячейку памяти рядов 20 выполняется по отдельному групповому входу, соединенному с переключателем “Выбор ряда”, посредством нажатия на кнопку набора. Переключатель “Выбор ряда” смещается на одно из положений задаваемого номер ряда.
Подобные действия с переключателем “Выбор шеренги” и кнопкой набора выполняются при задании необходимого номера шеренги.
Два последних номера (ряда и шеренги) обеспечивают подготовку подачи потенциалов на один из множества электромагнитных барабанов 4 или 5. Перечисленными действиями подготавливается задание для блока реверсивного управления 14 и координатного распределителя 18.
Исполнение команд, введенных в четырехпараметрической блок памяти 15, требует корректировки в силу конструктивных особенностей предлагаемого привода. Так, в каждой шеренге при охвате единой лентой привода четные ряды электромагнитных барабанов имеют обратное вращение по отношению к нечетным, что предполагает смещение исполнительных резьбовых стоек в разные стороны. Согласование направлений выполнено схемным путем. Команды направления смещения, внесенные в память 21, считываются через блок коррекции 16.
Подгруппа четных выходов памяти рядов 20, кроме подключения ко входам коммутатора рядов, параллельно подключена к цепи элементов ИЛИ 32 и НЕ 33 блока коррекции 16.
Отсутствие команд выбора ряда из любой четной ячейки памяти через последовательную цепочку элементов ИЛИ 32 и НЕ 33 открывает верхний ряд ключей (по схеме) 36 и 37 и создается “прямое” подключение памяти направлений к блоку реверсивного управления 14.
Наличие команд выбора ряда из любой четной ячейки памяти через элемент ИЛИ 32 открывает нижний ряд ключей (по схеме) 34 и 35 и создается “обратное, перекрестное” подключение памяти направлений к блоку реверсивного управления 14, при этом элемент НЕ 33 закрывает ключи верхнего ряда 36, 37.
Перекрестная схема блока коррекции 14 автоматически обеспечивает смещение исполнительных резьбовых стоек в заданном направлении несмотря на встречное направление вращения электромагнитных барабанов соседних рядов при охвате их лентой с разных сторон.
Наличие команды выбора в памяти шеренг по отдельному выводу из их группы включает соответствующий ключ подачи силового питания к избранному электромагнитному барабану. Информация в память шеренг 22 вводится последней и команда из любой ячейки параллельно через элемент ИЛИ 19 считывает данные из памяти перепада уровней. Поступление команды от элемента ИЛИ 19 запускает все блоки привода и блок реверсивного управления 14 на период, равный, например, числу оборотов, введенный в память перепада уровней 23, что смещает выделенную исполнительную резьбовую стойку в заданное положение.
Затем привод останавливается и для смещения очередной исполнительной резьбовой стойки требуется ввод очередных четырех параметров.
Тяговая лента может охватывать не две соседние шеренги, а несколько. Тогда двухвходовые элементы ИЛИ 19 заменяют на другие, у которых количество входов и ветвей тяговой ленты должно быть равным.
Электромагнитное перемещение рабочих органов, уменьшая сложность механического управления, способствует снижению уровня шума, облегчает обслуживание и позволяет повысить быстродействие привода, что выгодно при повышении степени централизации управления объектами по нескольким параметрам.
Одинаковая физическая природа и оперативность исполнения команд упрощают сочленение трехкоординатного привода с кибернетическими машинами типа вычислительных.
Технологичность изготовления множества элементов электромагнитного сцепления и передачи вращения и возможность исполнения барабанов с малыми габаритами позволяют уплотнить компоновку при трехмерной натуризации (макетирования) числовых массивов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ ПРОСТРАНСТВЕННЫХ РЕЛЬЕФОВ (ОПТООРИЕНАТОР) | 2001 |
|
RU2191352C1 |
| УСТРОЙСТВО ТРЕХКООРДИНАТНЫХ ПЕРЕМЕЩЕНИЙ | 2013 |
|
RU2548163C1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Анализатор законов распределения | 1979 |
|
SU960845A1 |
| Диэлькометр | 1990 |
|
SU1774245A1 |
| Устройство управления и контроля работы невзрывных импульсных источников сейсмических сигналов | 1986 |
|
SU1408402A1 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И СИСТЕМА БЕЗОПАСНОСТИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2276094C2 |
| МНОГОКАНАЛЬНЫЙ ДЕФЕКТОСКОП | 2001 |
|
RU2194273C1 |
| Устройство для автоматического контроля сопротивления и прочности изоляции электрических цепей | 1976 |
|
SU653585A1 |

Изобретение относится к электротехнике и может быть использовано для дистанционного создания силового воздействия на несколько объектов, сосредоточенных в ограниченном пространстве, например для управления оболочкой, моделирующей и формирующей конфигурацию рельефов, а также для управления электромеханическими переключателями силовых цепей, в частности при управлении индивидуальными секциями багажных, контейнерных, сортировочных, банковских накопителей и гостиниц. Техническим результатом является увеличение плотности компоновки исполнительных элементов устройства трехкоординатного устойчивого состояния. Трехкоординатный привод снабжен матричной схемой координатного доступа к любой его исполнительной стойке, при этом каждая стойка снабжена электромагнитным барабаном сцепления с тяговой лентой. Лента сочленена с реверсивным двигателем. Одинаковая физическая природа и оперативность исполнения команд упрощают сочленение трехкоординатного привода с кибернетическими машинами типа вычислительных. 3 з.п. ф-лы, 2 ил.
| ПЕРЕДАЧИ СИЛОВОГО ВОЗДЕЙСТВИЯ | 0 |
|
SU326675A1 |
| КОММУТИРУЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2091884C1 |
| 1971 |
|
SU416783A1 | |
| US 4538129 A, 27.08.1985 | |||
| WO 9403914 A1, 17.02.1994. | |||

