Изобретение относится к области ракетно-космической техники и, в частности, к способам и устройствам, обеспечивающим стабилизацию движения баллистических ракет подводных лодок (БРПЛ) на подводном участке траектории после выхода из пусковой шахты.
Известно, что основными факторами, усложняющими стабилизацию БРПЛ, являются:
- уменьшение относительного удлинения ракеты, что увеличивает ее статическую неустойчивость;
- расширение условий использования ракет по скорости хода подводной лодки (ПЛ) и интенсивности волнения моря;
- уменьшение относительной эффективности управляющих органов;
- увеличение плотности компоновки пусковой установки и ракеты в пусковой шахте и, как следствие, появление дополнительных боковых сил от последействия стартовых процессов и невозможности установки стабилизаторов на ракете, уменьшающих статическую неустойчивость.
Известны способ и устройство стабилизации движения морских баллистических ракет "Поларис" и "Посейдон" (США) на подводном участке траектории, включающие запуск парогазогенератора для создания высокой (более 50 м/с) скорости выхода ракеты из пусковой шахты, реализацию сплошного режима обтекания за счет обеспечения полной (или близкой к ней) обтюрации кольцевого зазора между ракетой и пусковой шахтой и выбора обводов ракеты, позволяющих также снизить величину лобового сопротивления (см., например, Б.П. Воронин, Н. А. Столяров. Подготовка к пуску и пуск ракет (Ракетная техника), УДК 623: 629.7.071. М. : Военное издательство министерства обороны СССР, 1972, с. 68-70).
Недостаток известного способа состоит в том, что после неуправляемого и неустойчивого движения в воде ракета выходит на поверхность, имея большие углы тангажа и рыскания, до 60 и более градусов, что приводит к потере энергетики ракеты на отработку этих угловых отклонений. Для парирования больших угловых возмущений необходимо также увеличение диапазонов углов прокачки командных гироскопов системы управления, увеличение углов отклонения и уменьшение времени перекладки управляющих органов.
Наиболее близким аналогом заявленного способа и устройства является способ и устройство для стабилизации движения на подводном участке траектории морской баллистической ракеты РСМ-52, на хвостовом отсеке которой установлен пояс обтюрации (ПО), выполненный из отдельных резинометаллических секций. Каждая секция состоит из металлического основания, закрепленного на ракете, и резинометаллической пластины, соединенной эластичным шарниром и боковыми упругими стенками с основанием, при этом свободный конец пластины скользит по стенке шахты. Данная конструкция пояса обтюрации служит в основном для увеличения поршневой выталкивающей силы, создаваемой продуктами сгорания порохового аккумулятора давления (ПАД). В носовой части ракеты установлено устройство, формирующее присоединенную газовую каверну путем наддува газами области пониженного динамического давления на поверхности ракеты и фиксирующее передний фронт каверны на кавитирующем насадке ракеты, имеющем острые кромки для схода струй жидкости. Каверна охватывает большую часть корпуса ракеты и изолирует ее от набегающего потока воды. Стабилизация ракеты РСМ-52 при движении на подводном участке траектории осуществляется использованием эффекта кавитации и задействованием управляющей силы, создаваемой путем вдува горячих газов в закритическую часть сопла маршевого двигателя первой ступени непосредственно после выхода ракеты из шахты. Для этого предусмотрены датчики выхода, по срабатыванию которых начинает работу автомат стабилизации ракеты, таким образом производят контроль параметров движения ракеты (см., например, Баллистические ракеты подводных лодок России (Избранные статьи), УДК: 629.762.2, Издание 2-е, дополненное. Государственный ракетный центр "КБ им. акад. В.П. Макеева", Миасс, 1997, с. 113, 119).
Недостатком известного способа стабилизации и устройства, обеспечивающего кавитационный способ старта, является значительная масса кавернообразующего устройства, сложность конструкции, ограниченность применения по глубине старта, формирование специальной траектории движения ракеты на начальном воздушном участке траектории для отделения этого устройства, что ведет к потере максимальной дальности.
Техническим результатом при использовании предложенного способа и устройства является расширение функционально-эксплуатационных возможностей способа и устройства для стабилизации БРПЛ при старте из пусковой шахты путем уменьшения гидродинамического момента, обусловленного качкой, ходом ПЛ и волнением моря при движении на подводном участке траектории.
1. Сущность изобретения состоит в том, что в способе стабилизации движения на подводном участке траектории морской баллистической ракеты с установленным на хвостовом отсеке ракеты поясом, обтюрирующим кольцевой зазор между ракетой и стенкой пусковой шахты и имеющим поворотные пластины, включающем запуск энергетического средства старта и контроль параметров движения ракеты, после выхода пояса обтюрации из пусковой шахты его поворотные пластины разворачивают навстречу набегающему потоку воды, при достижении пластинами пояса заданного углового положения относительно корпуса ракеты их фиксируют конструктивными средствами, а после выхода ракеты из воды производят отделение пояса от ракеты.
2. В устройстве для стабилизации движения морской баллистической ракеты на подводном участке траектории при старте из пусковой шахты, содержащем установленный на хвостовом отсеке ракеты пояс обтюрации, выполненный из отдельных секций, каждая из которых состоит из основания, закрепленного на ракете, и резинометаллической пластины, шарнирно соединенной одним концом с основанием, а свободным подпружиненным концом упирающимся в стенку пусковой шахты, каждая резинометаллическая пластина секции шарнирно соединена с основанием посредством оси и двух проушин, образованных на пластине, при этом в проушинах выполнены отверстия, предназначенные для взаимодействия с фиксаторами, расположенными в корпусе основания.
Для реализации предлагаемого способа и устройства для стабилизации БРПЛ на подводном участке траектории предлагается следующая последовательность действий:
- в процессе старта БРПЛ с установленным на хвостовом отсеке ракеты поясом обтюрации разгоняют, например, поршневой силой, возникающей от избыточного давления продуктов сгорания ПАД или за счет совместного действия тяги маршевого двигателя первой ступени и поршневого эффекта, и обеспечивают необходимую скорость выхода ракеты из пусковой шахты по условиям стабилизации на подводном участке;
- при движении в пусковой шахте пояс обтюрации, имеющий поворотные пластины, выполняет роль устройства, с помощью которого увеличивают скорость выхода ракеты и снижают тепловые нагрузки на боковую поверхность и головной обтекатель ракеты, а после выхода пояса из шахты его пластины разворачивают навстречу набегающему потоку воды, например, силой, возникающей от разницы давлений между донной частью ракеты и на уровне верхнего среза шахты, или средствами, предусмотренными на ракете конструктивно;
- при достижении поворотными пластинами пояса обтюрации углового положения относительно корпуса ракеты, необходимого для смещения центра давления вниз вдоль оси ракеты на заданную величину, достаточную для обеспечения устойчивого движения ракеты на подводном участке, пластины пояса фиксируют в данном положении, например, фиксаторами, выполненными в виде штоков с пружинами;
- при выходе ракеты из воды на начальном воздушном участке производят отделение пояса обтюрации от ракеты с целью уменьшения сопротивления дальнейшему движению на активном участке траектории. Отделение пояса обтюрации после выхода ракеты из воды производится по команде системы управления при помощи устройства отделения пояса обтюрации, включающего в себя, например, детонирующий удлиненный заряд (ДУЗ), уложенный в кольцевую проточку корпуса ракеты под основаниями секций пояса обтюрации, которые закреплены на корпусе ракеты разрывными элементами. Описанный вариант устройства отделения пояса обтюрации от ракеты успешно отработан на многочисленных бросковых, летных испытаниях и используется на серийных ракетах РСМ-52 с 1983 года.
По сравнению с ближайшим способом и устройством-аналогом предлагаемый способ и устройство для стабилизации движения БРПЛ на подводном участке траектории расширяют функционально-эксплуатационные возможности БРПЛ по условиям старта путем обеспечения устойчивого движения ракеты на подводном участке траектории, где БРПЛ испытывает максимальное силовое воздействие.
Для пояснения технической сущности предлагаемого изобретения на фиг.1а приведена схема функционирования одного из разрабатываемых поясов обтюрации при движении БРПЛ в пусковой шахте. Пояс обтюрации выполнен из отдельных секций 1, каждая из которых состоит из основания 2, закрепленного на ракете 3, и резинометаллической пластины 4, которая одним концом посредством оси 5 и двух проушин 6 пластины 4 шарнирно соединена с основанием 2 секции 1, а свободным подпружиненным концом упирается в стенку пусковой шахты 7. В проушинах выполнены отверстия 8, предназначенные для взаимодействия с фиксаторами 9, расположенными в корпусе основания 2, после выхода пояса обтюрации из пусковой шахты (фиг.1б).
С той же целью были проведены расчеты динамики БРПЛ на момент подхода носка ракеты к поверхности воды с учетом и без учета раскрытия и фиксации поворотных пластин пояса обтюрации для одного из возможных начальных участков старта морской баллистической ракеты. Численное моделирование проводилось с использованием математической модели пространственного движения ракеты, при этом использовались стартовая OXсYсZc и связанная с ракетой O1X1Y1Z1 системы координат. Начало стартовой системы координат находится в точке пересечения местной вертикали с опорной плоскостью ракеты в пусковой шахте. Ось OYс направлена вертикально вверх, горизонтальная ось ОХс лежит в плоскости стрельбы и направлена в сторону цели, а ось OZс дополняет систему до правой. Начало связанной системы координат совпадает с центром масс ракеты, ось O1Х1 направлена по продольной оси к носку ракеты, ось O1Y1 направлена к плоскости III, а ось O1Z1 - к плоскости IV.
Параметры динамики БРПЛ с раскрывающимися и фиксирующимися поворотными пластинами пояса обтюрации будут отличаться от аналогичных параметров без раскрытия пластин пояса следующим образом: время движения на подводном участке уменьшается на ~0,6 с, вертикальная составляющая скорости центра масс БРПЛ в стартовой системе координат увеличивается на ~8 м/с, координата центра масс БРПЛ в стартовой системе координат в горизонтальном направлении станет меньше на ~12 м, угол отклонения БРПЛ (отсчет от вертикали) в канале тангажа уменьшается на ~60o. Вследствие раскрытия и фиксации пластин пояса обтюрации на подводном участке траектории изменятся следующие гидродинамические характеристики БРПЛ: координата центра давления сместится вниз вдоль оси ракеты на ~2,3 м, производная коэффициента нормальной силы по углу атаки увеличится на 0,0185, абсолютная величина производной коэффициента момента нормальной силы по угловой скорости увеличится на 0,161, коэффициент силы лобового сопротивления увеличится на 0,438.
Для пояснения приведенных данных по динамике БРПЛ запишем уравнение углового движения БРПЛ в векторной форме, полученное из известной теоремы о моменте количества движения системы (см., например, Е.Д. Томилов. Теоретическая механика, часть 2, Томск, 1970, с. 75):
где  - момент количества движения ракеты относительно начала координат, совпадающего с центром масс ракеты;
- момент количества движения ракеты относительно начала координат, совпадающего с центром масс ракеты; - главный момент гидродинамических сил инерционного происхождения;
- главный момент гидродинамических сил инерционного происхождения; - главный момент гидродинамических сил вихревого происхождения;
- главный момент гидродинамических сил вихревого происхождения; - главные моменты негидродинамических сил, приложенные к ракете: веса, Архимеда, тяги двигателя.
- главные моменты негидродинамических сил, приложенные к ракете: веса, Архимеда, тяги двигателя.
Главный момент гидродинамических сил  вихревого происхождения в проекциях на оси связанной системы координат записывается по аналогии с аэродинамическими моментами (см. , например, Н.Я. Фабрикант. Аэродинамика. М.: Наука, 1964, с. 194)
вихревого происхождения в проекциях на оси связанной системы координат записывается по аналогии с аэродинамическими моментами (см. , например, Н.Я. Фабрикант. Аэродинамика. М.: Наука, 1964, с. 194)

где  - скоростной напор;
- скоростной напор;
m - угол между осью ракеты и проекцией вектора скорости на плоскость O1X1Y1 или угол атаки с учетом волнения моря;
- угол между осью ракеты и проекцией вектора скорости на плоскость O1X1Y1 или угол атаки с учетом волнения моря; - угол отклонения вектора скорости ракеты от диаметральной плоскости O1X1Y1 или угол скольжения с учетом волнения моря;
- угол отклонения вектора скорости ракеты от диаметральной плоскости O1X1Y1 или угол скольжения с учетом волнения моря; - скорость ракеты относительно воды;
- скорость ракеты относительно воды; - вектор скорости волнового потока (за положительное направление волны принято направление от плоскости I к IV);
- вектор скорости волнового потока (за положительное направление волны принято направление от плоскости I к IV);
c - производная коэффициента момента нормальной силы по угловой скорости;
- производная коэффициента момента нормальной силы по угловой скорости;
Vy1, Vz1, Uy1, uz1 - проекции вектора скорости центра масс ракеты и вектора скорости волнового потока на оси связанной системы координат;
ωy1, ωz1 - проекции вектора угловой скорости ракеты на оси связанной системы координат;
хт - координата центра масс ракеты;
хd - координата центра давления;
ρ -массовая плотность воды;
Sм, L - площадь миделевого сечения и длина ракеты.
Как известно, гидродинамический момент  разбивается на два слагаемых (см. уравнения (2) и (3)). Первое слагаемое - статический или позиционный момент, который определяется как функция угла атаки (скольжения) при нулевой скорости вращения и зависит от ориентации ракеты по отношению к потоку; от позиции, которую она занимает в потоке. Если статический момент направлен в сторону уменьшения угла атаки, он называется восстанавливающим или стабилизирующим моментом, при обратном направлении его называют опрокидывающим или дестабилизирующим. Второе слагаемое - демпфирующий момент, зависящий от угловой скорости вращения ракеты в потоке (ωy1, ωz1). Демпфирующие моменты всегда направлены в сторону, противоположную вращению.
разбивается на два слагаемых (см. уравнения (2) и (3)). Первое слагаемое - статический или позиционный момент, который определяется как функция угла атаки (скольжения) при нулевой скорости вращения и зависит от ориентации ракеты по отношению к потоку; от позиции, которую она занимает в потоке. Если статический момент направлен в сторону уменьшения угла атаки, он называется восстанавливающим или стабилизирующим моментом, при обратном направлении его называют опрокидывающим или дестабилизирующим. Второе слагаемое - демпфирующий момент, зависящий от угловой скорости вращения ракеты в потоке (ωy1, ωz1). Демпфирующие моменты всегда направлены в сторону, противоположную вращению.
Известно, что взаимное расположение центра давления и центра масс определяет аэродинамическую стабилизацию ракеты. У современных БРПЛ центр давления расположен выше центра масс вдоль оси ракеты, и подъемная сила увеличивает угол атаки; статический момент становится дестабилизирующим, а ракета - статически неустойчивой.
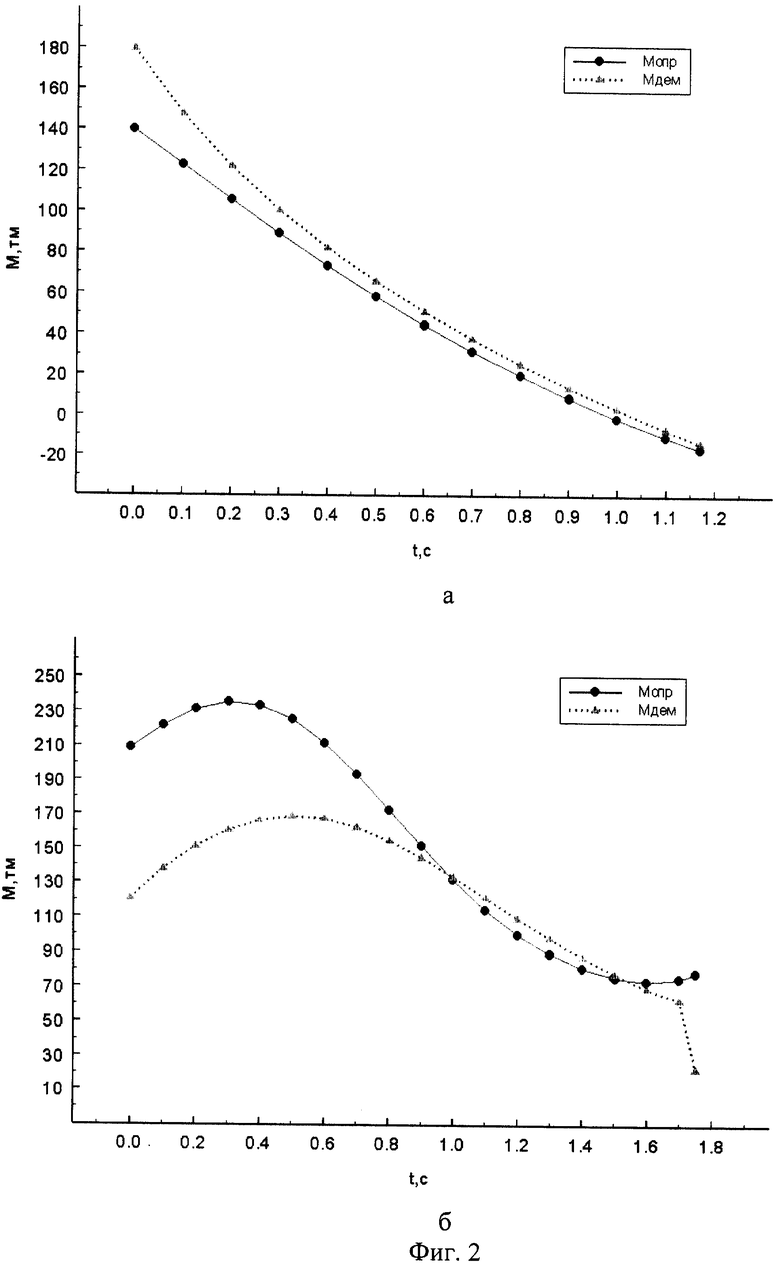
Остальные моменты, входящие в уравнение углового движения БРПЛ на подводном участке, кроме момента от органов управления, не являются определяющими. Очевидно, что управляющий момент, создаваемый тягой двигателя в случае с раскрытием и фиксацией и без раскрытия поворотных пластин пояса обтюрации после выхода его из пусковой шахты, одинаков. Одинаковы и начальные условия на момент выхода БРПЛ из шахты (линейные и угловые скорости, углы). Поэтому для наглядности представления влияния раскрытия и фиксации пластин пояса обтюрации, на фиг.2а (с раскрытием и фиксацией пластин ПО) и фиг.2б (без раскрытия пластин ПО) приведены графики опрокидывающего и демпфирующего (взятого для удобства сравнения с обратным знаком) моментов, действующих на ракету при ее движении на подводном участке.
Анализируя приведенные данные по динамике БРПЛ, графики на фиг.2а и фиг. 2б, видим, что раскрытие и фиксация пластин пояса обтюрации приводит к существенному изменению коэффициента m Раскрытие и фиксация пластин пояса обтюрации значительно увеличивает коэффициент лобового сопротивления cx1, но, несмотря на это, время движения БРПЛ на подводном участке меньше, а вертикальная составляющая скорости больше, чем в случае без раскрытия пластин пояса обтюрации. Это можно объяснить большими угловыми отклонениями при неустойчивом движении ракеты на подводном участке траектории без раскрытия пластин пояса обтюрации и, как следствие, большим путем, пройденным ракетой.
Раскрытие и фиксация пластин пояса обтюрации значительно увеличивает коэффициент лобового сопротивления cx1, но, несмотря на это, время движения БРПЛ на подводном участке меньше, а вертикальная составляющая скорости больше, чем в случае без раскрытия пластин пояса обтюрации. Это можно объяснить большими угловыми отклонениями при неустойчивом движении ракеты на подводном участке траектории без раскрытия пластин пояса обтюрации и, как следствие, большим путем, пройденным ракетой.
Предлагаемые способ и устройство для стабилизации движения БРПЛ на подводном участке траектории по сравнению с известными техническими решениями расширяют функционально-эксплуатационные возможности БРПЛ по условиям старта, а именно:
- используют пояс обтюрации, установленный на хвостовом отсеке ракеты, в качестве средства стабилизации ракеты;
- снижают требования к характеристикам управляющих органов (тяге, углам прокачки, времени перекладки и т. д.);
- расширяют диапазон применения БРПЛ по условиям скорости хода ПЛ, волнении моря и глубине старта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТДЕЛЕНИЯ АМОРТИЗАТОРОВ РАКЕТЫ НА ТРАЕКТОРИИ ПОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2199081C2 |
| АМОРТИЗАЦИОННОЕ УСТРОЙСТВО МОРСКОЙ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ | 2001 |
|
RU2199082C1 |
| СПОСОБ СПАСЕНИЯ РАКЕТ-НОСИТЕЛЕЙ МНОГОРАЗОВОГО ПРИМЕНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2202500C2 |
| СПОСОБ УПРАВЛЕНИЯ ГИПЕРЗВУКОВЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2235048C2 |
| СПОСОБ ПУСКА РАКЕТЫ ИЗ ШАХТЫ ПОДВОДНОЙ ЛОДКИ | 2002 |
|
RU2235286C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ РАКЕТЫ ПРИ ПОДВОДНОМ СТАРТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2607126C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СПАСАЕМОГО КОСМИЧЕСКОГО АППАРАТА | 1994 |
|
RU2128610C1 |
| СПОСОБ УПРАВЛЕНИЯ ГИПЕРЗВУКОВЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2167794C1 |
| СПУСКАЕМЫЙ КОСМИЧЕСКИЙ АППАРАТ | 2002 |
|
RU2234442C2 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ СТУПЕНЕЙ МОРСКОЙ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ НА ЖИДКОМ ТОПЛИВЕ | 2002 |
|
RU2235287C2 |
Изобретение относится к области ракетно-космической техники. Способ стабилизации движения морской баллистической ракеты на подводном участке траектории заключается в том, что после выхода ракеты из пусковой шахты поворотные пластины пояса обтюрации, расположенного на хвостовом отсеке ракеты, разворачиваются навстречу набегающему потоку воды, и при достижении пластинами заданного углового положения относительно корпуса ракеты их фиксируют конструктивными средствами. После выхода ракеты из воды производят отделение пояса обтюрации от ракеты с целью уменьшения сопротивления дальнейшему движению на активном участке траектории. Устройство для осуществления способа содержит установленный на хвостовом отсеке ракеты пояс обтюрации из отдельных секций, состоящих из закрепленного на ракете основания и соединенной с ним шарнирно резинометаллической пластины, упирающейся свободным подпружиненным концом в стенку пусковой шахты. Каждая пластина соединена с основанием посредством оси и двух проушин, образованных на пластине. В проушинах выполнены отверстия для взаимодействия с фиксаторами, расположенными в корпусе основания. Изобретение позволяет стабилизировать движение ракеты на подводном участке траектории, где она подвергается силовому воздействию, обусловленному ходом, качкой ПЛ и волнением моря. 2 с.п. ф-лы, 2 ил.
| Баллистические ракеты подводных лодок России | |||
| Государственный ракетный центр "КБ им | |||
| акад | |||
| В.П | |||
| Макеева" | |||
| - Миасс, 1997, изд | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ обработки грубых шерстей на различных аппаратах для мериносовой шерсти | 1920 |
|
SU113A1 |
| Оружие и технологии России | |||
| Изд | |||
| дом "Оружие и технологии" | |||
| - М., 2000, Стратегические ядерные силы, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кран машиниста для автоматических тормозов с сжатым воздухом | 1921 |
|
SU194A1 |

