Изобретение относится к области ракетно-космической техники и может быть использовано в процессе эксплуатации осесимметричных гиперзвуковых летательных аппаратов с корпусом составной конической формы, осуществляющих управляемый полет с помощью двигательной установки на межконтинентальную дальность.
Государственный ракетный центр (ГРЦ)КБ имени академика В.П. Макеева является головным разработчиком легких баллистических ракет для подводных лодок (БРПЛ), способных обеспечить полет на межконтинентальную дальность аппаратов с массой до 1 т (см., например, И.И.Величко. Мечи - на орала. Авиация и космонавтика. №5. 1993 г. ISSN 0373-9821, стр.42-43).
В силу особенностей конструкции разрабатываемых ГРЦ аппаратов из всех известных траекторий движения на межконтинентальную дальность (баллистической, планирующей, рикошетирующей, настильной) (см., например, Н.Ф.Краснов, В.Н.Кошевой. Управление и стабилизация в аэродинамике. М.: Высшая школа, 1978 г., с.130) для аппаратов этого типа наиболее целесообразно использовать траектории рикошетирующего типа.
Наиболее близким аналогом заявленного способа является способ управления гиперзвуковым летательным аппаратом, в котором осуществляют полет на межконтинентальную дальность и на пассивном участке траектории вводят аппарат в режим многократного рикошетирования с максимальным аэродинамическим качеством, в нем разгоняют аппарат в восточном направлении до круговой скорости в апогее траектории высотой не более 100 км, при крутизне траектории не более - 2° вводят аппарат в пикирование с максимальным аэродинамическим качеством, в процессе пикирования по параметрам движения аппарата определяют его кориолисовое ускорение в системе вращающейся Земли, при равенстве кориолисова и поперечного кажущегося ускорения переводят аппарат в кабрирование, удерживают аппарат в режиме кабрирования с максимальным аэродинамическим качеством до формирования крутизны не более 2° , осуществляют циклическое повторение режима пикирование-кабрирование в процессе рикошетирующего движения аппарата на межконтинентальную дальность (см. заявка №200010415228 (004268). Способ управления гиперзвуковым летательным аппаратом. Государственный ракетный центр "КБ имени академика В.П.Макеева", авторы Киселев В.И., Фетисов B.A., RU патент № 2167794, 27.05.2001. Бюл. №15).
Техническим результатом при использовании способа-аналога является обеспечение минимального нагрева и уровня перегрузок аппарата с сохранением управляемости и устойчивости полета на межконтинентальную дальность.
Для аппаратов, разрабатываемых ГРЦ, управляемость и устойчивость полета обеспечивается с помощью двигательной установки, которая работает в способе-аналоге в непрерывном режиме в процессе всего полета на межконтинентальную дальность, при этом расход топлива даже при минимально возможной тяге двигателя из-за длительности времени движения аппарата на межконтинентальную дальность достигает на этих траекториях недопустимых весовых значений и является недостатком способа-аналога, снижающим его функционально-эксплуатационные возможности.
Техническим результатом при использовании предложенного способа управления гиперзвуковым летательным аппаратом является расширение функционально-эксплуатационных возможностей известного способа путем создания необходимой подъемной силы аппарата без задействования управляющей двигательной установки, а за счет конструктивно-компоновочных параметров аппарата, обеспечивающих устойчивое статически положение аппарата в процессе движения на программных углах атаки, обеспечивающих максимальное аэродинамическое качество аппарату в полете без затрат энергетики двигателя.
Сущность изобретения состоит в том, что в способе управления гиперзвуковым летательным аппаратом, в котором осуществляют полет на межконтинентальную дальность и на пассивном участке траектории вводят аппарат в режим плоского управляемого рикошетирования с крутизной траектории не более ± 2° , в нем до начала управляемого движения аппарата обеспечивают существование в нем знакопеременного запаса статической устойчивости при движении аппарата на гиперзвуковых скоростях в рабочем диапазоне углов атаки от 0 до 30° , в котором в начале рикошетирования разворачивают аппарат с помощью двигательной установки в канале тангажа на угол 15... 20° и отключают двигательную установку при достижении заданного уровня поперечных перегрузок, осуществляют процесс рикошетирования аппарата с выключенным двигателем канала тангажа при статически устойчивом положении аппарата на углах атаки, обеспечивающих ему максимальное аэродинамическое качество в полете, а при достижении межконтинентальной дальности включают двигательную установку в канале тангажа и выводят аппарат из статически устойчивого положения.
Для реализации предлагаемого способа управления гиперзвуковым летательным аппаратом предполагается следующая последовательность действий:
- до начала рикошетирования (на Земле или в полете) обеспечивают знакопеременный характер запаса статической устойчивости (Δ Сд?0) аппарата в рабочем диапазоне углов атаки от 0 до 30° , при гиперзвуковых скоростях движения аппарата путем регулирования либо положения центра масс, либо центра давления аппарата, либо того и другого одновременно;
- разгоняют аппарат в восточном направлении до круговой скорости при апогее траектории не более 100 км;
- по прохождении аппаратом апогея (при крутизне траектории не более -2° ) разворачивают аппарат с помощью двигательной установке в канале тангажа на угол 15... 20° , замеряют уровень поперечных перегрузок и отключают двигательную установку при достижении заданного, например единицы, уровня поперечных перегрузок;
- осуществляют процесс плоского рикошетирования аппарата при крутизне траектории не более ± 2° С выключенным двигателем в канале тангажа при статически устойчивом положении аппарата на углах атаки, обеспечивающих ему максимальное аэродинамическое качество в полете;
- при достижении межконтинентальной дальности включают двигательную установку в канале тангажа и выводят аппарат из статически устойчивого положения.
По сравнению с ближайшим способом-аналогом предлагаемый способ управления гиперзвуковым летательным аппаратом обладает более широкими функционально-эксплуатационными возможностями путем создания необходимой величины подъемной силы при рикошетировании аппарата без задействования двигательной установки.
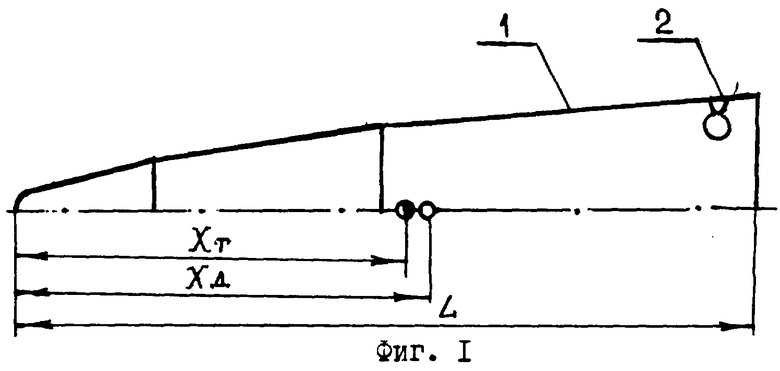
Для пояснения технической сущности предлагаемого изобретения на фиг.1 приведена схема одного из разрабатываемых в ГРЦ "КБ им. академика В.П.Макеева" осесимметричного летательного аппарата с корпусом 1 составной конической формы, управляемого двигательной установкой 2.
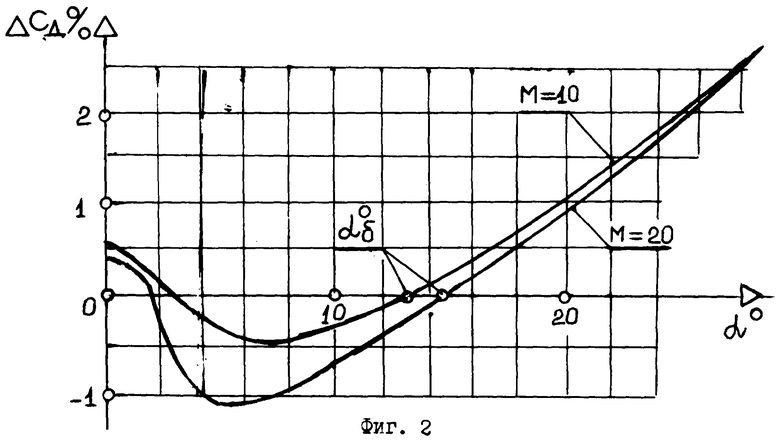
На фиг.2 приведен характер изменения запаса статической устойчивости (Δ Сд) в предлагаемом способе управления в зависимости от параметров движения (числа Маха - М и угла атаки - α ° ).
Основные параметры аппарата в процессе движения по одной из возможных траекторий плоского рикошетирования приведены в таблице.

Примечания к таблице
1. Кривые Δ Сд на фиг.2, иллюстрирующие поведение запаса статической устойчивости аппарата для фиксированных чисел Маха (М=10-20) и переменного угла атаки (α ° =0° -30° ) определены из соотношения:
где Xт(Xд) - расстояние от вершины аппарата до центра масс (давления) соответственно, м.
L - расстояние от вершины аппарата до его основания, м.
Нелинейный характер зависимости Δ Сд от α ° обусловлен формой корпуса аппарата (корпус составной конический), а наличие знакопеременных значений Δ Сд?0 в предлагаемом изобретении в отличие от аналога, где Δ Сд&γτ;0 обусловлено соответствующим выбором центра масс аппарата (здесь центр масс аппарата удален от его вершины на 0,59-40,60 его длины).
2. Углы атаки α ° δ ~ 12° -15° соответствуют режиму, в котором аппарат занимает устойчивое положение при отключенных двигателях в процессе рикошетирования, при этом α ° δ - наивыгоднейший угол атаки, при котором аэродинамическое качество аппарата максимально.
Для введения аппарата в статически нейтральное устойчивое положение выполняется следующая последовательность действий:
- до начала процесса рикошетирования (на Земле или в полете) обеспечивают знакопеременный характер запаса статической устойчивости (Δ Сд<=>0) аппарата в рабочем диапазоне углов атаки от 0 до 30° при гиперзвуковых скоростях движения аппарата путем регулирования либо положения центра масс, либо центра давления аппарата, либо того и другого одновременно;
- при достижении в процессе движения заданных параметров включают двигательную установку аппарата в канале тангажа и разворачивают аппарат на угол ~ 15... 20° и при достижении поперечной перегрузкой аппарата требуемых значений выключают двигатель;
- после выключения двигателя аппарат за счет знакопеременного аэродинамического момента начнет совершать колебания вокруг угла атаки α ° δ , после затухания которых он будет совершать устойчивое движение на этом угле атаки, обеспечивающем ему необходимую для рикошетирования подъемную силу при отключенном двигателе.
Предлагаемый способ управления гиперзвуковым летательным аппаратом, по сравнению с известными техническими решениями предельно минимизирует потребный запас энергетики на борту аппарата, который по сравнению с известным способом-аналогом уменьшается ~ на 40%.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГИПЕРЗВУКОВЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2167794C1 |
| ОДНОСТУПЕНЧАТАЯ ОСЕСИММЕТРИЧНАЯ МНОГОРАЗОВАЯ РАКЕТА-НОСИТЕЛЬ И СПОСОБ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ В ПРОЦЕССЕ ДВИЖЕНИЯ ОДНОСТУПЕНЧАТОЙ РАКЕТЫ-НОСИТЕЛЯ | 2001 |
|
RU2226169C2 |
| КОСМИЧЕСКИЙ ГИПЕРЗВУКОВОЙ КОМПЛЕКС | 1976 |
|
SU1826442A1 |
| ГИПЕРЗВУКОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ РЕАЛИЗАЦИИ ЕГО ПОЛЕТА | 2009 |
|
RU2393978C1 |
| СВЕРХЗВУКОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ РЕАЛИЗАЦИИ ЕГО ПОЛЕТА | 2015 |
|
RU2619361C2 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ ЕГО СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ (ВАРИАНТЫ) | 2001 |
|
RU2213682C2 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ СПУСКА КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 1994 |
|
RU2083448C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ЛЕТАЮЩЕЕ КРЫЛО | 2019 |
|
RU2744692C2 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ И СПОСОБ ЕГО СПУСКА С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2005 |
|
RU2334656C2 |
| СПОСОБ ВЫВЕДЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ В КОСМОС МНОГОРАЗОВОЙ ТРАНСПОРТНО-КОСМИЧЕСКОЙ СИСТЕМОЙ (ВАРИАНТЫ) | 2006 |
|
RU2331551C2 |
Изобретение относится к области ракетно-космической техники и может быть использовано при эксплуатации межконтинентальных летательных аппаратов составной конической формы. Согласно предлагаемому способу на пассивном участке траектории вводят аппарат в режим плоского управляемого рикошетирования с крутизной траектории не более ±2°. При этом до начала рикошетирования аппарату придают знакопеременный запас статической устойчивости при движении на гиперзвуковых скоростях в рабочем диапазоне углов атаки от 0 до 30°. В начале рикошетирования разворачивают аппарат с помощью двигательной установки в канале тангажа на угол атаки 15-20°, обеспечивающий максимальное аэродинамическое качество на гиперзвуковых скоростях. Затем отключают двигательную установку при достижении заданного уровня поперечных перегрузок. Тем самым последующий процесс рикошетирования будет происходить с выключенной двигательной установкой при статически устойчивом положении аппарата на указанном угле атаки. При достижении условий выхода на межконтинентальную дальность включают двигательную установку в канале тангажа и выводят аппарат из статически устойчивого положения. Технический результат изобретения состоит в снижении энергозатрат на обеспечение необходимой маневренности и дальности полета путем исключения потребности в двигательной установке для ориентации аппарата в положение создания подъемной силы. 2 ил., 1 табл.
Способ управления гиперзвуковым летательным аппаратом, в котором при осуществлении полета на межконтинентальную дальность на пассивном участке траектории вводят аппарат в режим плоского управляемого рикошетирования с крутизной траектории не более ±2°, отличающийся тем, что в нем до начала управляемого рикошетирования аппарату придают знакопеременный запас статической устойчивости при движении на гиперзвуковых скоростях в рабочем диапазоне углов атаки от 0 до 30°, а в начале рикошетирования разворачивают аппарат с помощью двигательной установки в канале тангажа на угол атаки 15-20°, обеспечивающий аппарату максимальное аэродинамическое качество на гиперзвуковых скоростях, и отключают двигательную установку при достижении заданного уровня поперечных перегрузок, осуществляя тем самым последующий процесс рикошетирования аппарата с выключенной двигательной установкой при статически устойчивом положении аппарата на указанном угле атаки, а при достижении условий выхода на межконтинентальную дальность включают двигательную установку в канале тангажа и выводят аппарат из статически устойчивого положения.
| СПОСОБ УПРАВЛЕНИЯ ГИПЕРЗВУКОВЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2167794C1 |
| SU 1811129 А, 10.10.1996 | |||
| КРАСНОВ Н.Ф., КОШЕВОЙ В.Н | |||
| Управление и стабилизация в аэродинамике | |||
| - М.: Высшая школа, 1978, с.130 | |||
| АНДРЕЕВСКИЙ В.В | |||
| Динамика спуска космических аппаратов на Землю | |||
| - М.: Машиностроение, 1970, с.49-87. | |||

