Изобретение относится к измерительной технике, к первичным датчикам-преобразователям энергии и может быть использовано в сейсмической разведке и в гидроакустических устройствах.
Известны первичные датчики давления - гидрофоны [1, 2], состоящие из поляризованной пьезокерамики с выводами, помещенной в защитную звукопрозрачную оболочку.
Несмотря на достаточно ровную амплитудно-частотную характеристику в области низких частот, все же выделить полезный сигнал на низких звуковых и инфразвуковых частотах в неоднородной среде на фоне внешних шумов весьма затруднительно ввиду малой удельной чувствительности самого пьезокерамического элемента.
Ближайшим аналогом заявляемого технического решения являются первичные датчики скорости - геофоны [3, 4], состоящие из корпуса, в котором размещены индукционная катушка, закрепленная к корпусу на упругой подвеске, и неподвижный постоянный магнит, размещенный внутри индукционной катушки, также закрепленный на корпусе.
Недостатком геофонов является то, что они имеют резонансную амплитудно-частотную характеристику и при смещении в сторону низких частот падает чувствительность приемных устройств из-за быстрого возрастания упругого сопротивления подвеса индукционной катушки [4], ухудшается основной показатель приемного устройства, это отношение энергии полезного сигнала к энергии существующей помехи, поэтому выделить полезный низкочастотный сигнал в неоднородной среде, да еще на фоне внутренних и внешних шумов весьма затруднительно.
Целью настоящего изобретения является повышение эффективности выделения полезного низкочастотного сигнала в широкой полосе частот в неоднородной среде за счет увеличения первичным датчиком начальных экстремальных значений индуцируемой ЭДС, т.е. за счет повышения удельной чувствительности и помехозащищенности.
Поставленная цель достигается тем, что известный геофон, содержащий корпус, индукционную катушку и постоянный магнит, снабжен еще двумя индукционными катушками, двумя постоянными магнитами и двумя пьезокерамическими элементами с накладками.
Все три постоянных магнита размещены на одной оси и одноименными полосами друг к другу с образованием между ними двух межмагнитных расстояний X1 и Х2 так, чтобы средний магнит оказался в магнитной подвеске с возможностью его перемещения вдоль оси.
Пьезокерамические элементы также размещены на одной оси с пластинами постоянных магнитов, а катушки неподвижно закреплены на корпусе.
На чертеже схематично изображен пьезомагнитный геофон.
Пьезомагнитный геофон состоит из корпуса 1, в котором размещены три кольцевые индукционные катушки 2, 3 и 4. С двух торцов корпуса 1 размещены накладки 5 и 6, на которых жестко закреплены пьезокерамические элементы 7 и 8, а на элементах 7 и 8 на жестких магнитопроводящих подложках 9 и 10 закреплены пластины постоянных магнитов 11 и 12.
Между магнитами 11 и 12 размещен третий постоянный магнит 13, при этом его диаметр может быть равным, больше или меньше диаметров магнитов 11 и 12, а его центральная ось 14 выполнена из немагнитного материала и размещена в подшипниках скольжения 15.
Все пластины постоянных магнитов 11, 12 и 13 размещены на одной оси с образование воздушных магнитных зазоров X1 и Х2 и одноименными полюсами друг к другу, при этом средняя плоскость магнита 13 пересекает индукционную катушку 3, а магниты 11 и 12 размещены во внутреннем объеме катушек 2 и 4.
Магнитные потоки Ф1,Ф2 и Ф3 от пластин постоянных магнитов 11, 12 и 13 пересекают витки индукционных катушек 2, 3 и 4, индуцируя в них ЭДС. Поскольку в межмагнитных расстояниях X1 и Х2 магнитные потоки Ф1,Ф2 и Ф3 одного направления, то между ними создаются пондеромоторные отталкивающие силы F, наличие которых с обеих сторон от магнита 13 создают ему упругую магнитную подвеску с гибкостью С, которая обеспечивает ему перемещение вдоль оси 14.
Величинами коэрцитивных сил постоянных магнитов 11, 12 и 13, изменением массы магнита 13 и изменением величины межмагнитных расстояний X1 и Х2 имеется возможность создавать колебательную систему пьезомагнитного геофона на магнитной подвеске с заданной гибкостью С и величину начального давления на пьезокерамические элементы 7 и 8.
При отсутствия внешнего воздействия на геофон масса постоянного магнита 13 всегда находится в состоянии покоя, в нулевом исходном положении, при этом магнитные силовые линии не изменяют свою форму и на выводах 16, 17, 18, 19 и 20 индукционных катушек 2, 3 и 4 и пьезокерамических элементов 7 и 8 наведенная ЭДС отсутствует.
Пьезомагнитный геофон работает следующим образом.
Акустическая волна, распространяясь в среде, воздействует на корпус 1 и на все элементы, находящиеся в нем.
Поскольку масса постоянного магнита 13 находится в магнитной подвеске, то под воздействием механических колебаний корпуса 1 магнит 13 будет выведен из состояния покоя относительно корпуса 1 и индукционных катушек 2, 3 и 4 и, находясь на упругой магнитной подвеске, он начинает совершать колебания вдоль своей оси 14, воздействуя, таким образом, своим магнитным потоком Ф3 на витки индукционной катушки 3, индуцируя в них ЭДС.
Одновременно своим магнитным потоком Ф3 магнит 13 воздействует на магнитные потоки Ф1 и Ф2 постоянных магнитов 11 и 12, изменяя форму магнитных силовых линий этих потоков.
Изменяющаяся форма силовых линий магнитных потоков Ф1 и Ф2, пресекая витки индукционных катушек 2 и 4, также будет индуцировать в них ЭДС.
Магнит 13 одновременно своей коэрцитивной силой Fk в межмагнитных зазорах X1 и Х2, воздействует через магнитные потоки Ф1 и Ф2 на постоянные магниты 11 и 12 и через жесткие прокладки 9 и 10 на пьезокерамические элементы 7 и 8.
Поскольку пьезокерамические элементы 7 и 8 имели предварительные обжатия, то под воздействием знакопеременных пондеромоторных сил в магнитных зазорах X1 и Х2 между магнитом 13 и магнитами 11 и 12 в элементах 7 и 8 происходит изменение ЭДС, т. е. предположим, что в первом полупериоде колебания постоянного магнита 13, когда X1 уменьшается, а Х2 увеличивается, то давление на пьезокерамический элемент 7 увеличивается, а на элемент 8 уменьшается, на втором полупериоде наоборот. Поэтому в первом полупериоде потенциалы на элементе 7 складываются, а на элементе 8 вычитаются, во втором полупериоде наоборот: на элементе 8 складываются, на элементе 7 вычитаются. Таким образом, при воздействии акустической волны на пьезомагнитный геофон имеется пять элементов источников ЭДС, одновременно реагирующие на процесс прохождения волны:
- два пьезокерамических элемента 7 и 8 как датчики давления;
- три индукционных катушки 2, 3 и 4 как датчики скорости.
Эта совокупность источников ЭДС позволяет применить теорию корреляции потенциалов по принимаемому сигналу, уменьшить общее внутреннее сопротивление пьезомагнитного геофона за счет смешанного соединения источников ЭДС, а чем меньше внутреннее сопротивление приемника, тем меньше падение напряжения на нем и, соответственно, больше напряжение на нагрузке, на клеммах 16, 17, 18 19 и 20. Это позволяет повысит отношение "полезный сигнал/шум" и осуществить первичную фильтрацию принимаемого сигнала от внешних шумов, повысить точность формы принимаемого сигнала и его амплитудно-фазовые распределения в широкой полосе частот.
Создание заявляемого пьезомагнитного геофона как первичного датчика позволяет создавать новые более эффективные геофизические широкополосные когерентные приемоизлучающие системы, предназначенные для работы в воде, в заболоченных местах и на суше, и охранные системы по обнаружению шумящих целей.
Источники информации
1. Гранин B.C. "Гидрофон", Авторское свидетельство 1766232, Н 04 Р 1/44, заявка 4789407/10, приоритет 06.02.90 г., журнал И.Р. 16, 1994 г., стр. 215.
2. Г. М. Свердлин "Гидроакустические преобразователи и антенны", Л.: "Судостроение", 1980 г.
3. Электродинамический сейсмоприемник", заявка РФ 94001083/25 от 12.01.92 г., G 01 V 1/16, журнал И.Р. 20 за 1994 г., стр. 16.
4. В.В. Фурдуев "Электроакустика", ОГИЗ, М., 1948, ξ78, стр. 327.
| название | год | авторы | номер документа |
|---|---|---|---|
| Поляризованный электромагнитный излучатель | 1990 |
|
SU1716624A1 |
| Электромагнитный преобразователь | 1990 |
|
SU1831771A3 |
| МАГНИТОЖИДКОСТНОЕ УПЛОТНЕНИЕ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ | 2019 |
|
RU2721400C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕОБРАЗОВАТЕЛЬ И СПОСОБ ЕГО ПИТАНИЯ | 1992 |
|
RU2097148C1 |
| ВЫКЛЮЧАТЕЛЬ МГНОВЕННОГО ДЕЙСТВИЯ | 2011 |
|
RU2466474C1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2023234C1 |
| ПРИЕМОИЗЛУЧАЮЩАЯ КОГЕРЕНТНАЯ ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА (ПИК-ГАС) | 2000 |
|
RU2204150C2 |
| Излучающая система | 1990 |
|
SU1831769A3 |
| Способ измерения сложных механических деформаций с помощью аморфной металлической ленты и устройство для калибровки чувствительного элемента | 2018 |
|
RU2708695C1 |
| ЛОКАТОР ПЕРФОРАЦИОННЫХ ОТВЕРСТИЙ И СОЕДИНИТЕЛЬНЫХ МУФТ ОБСАДНЫХ ФЕРРОМАГНИТНЫХ ТРУБ | 2000 |
|
RU2191365C2 |
Изобретение относится к измерительной технике, к первичным датчикам-преобразователям энергии и может быть использовано в сейсморазведке, в гидроакустических устройствах и охранных системах по обнаружению движущихся целей. Пьезомагнитный геофон содержит корпус, в котором размещены три неподвижные индукционные катушки, три постоянных магнита с образованием межмагнитных расстояний Х1 и Х2 и два пьезокерамических элемента с накладками. Постоянные магниты и пьезокерамические элементы с накладками размещены на одной оси так, что средний магнит находится в магнитной подвеске с гибкостью С, которая позволяет ему перемещаться вдоль оси в межмагнитных расстояниях Х1 и Х2. Технический результат: повышение удельной чувствительности и помехозащищенности. 1 ил.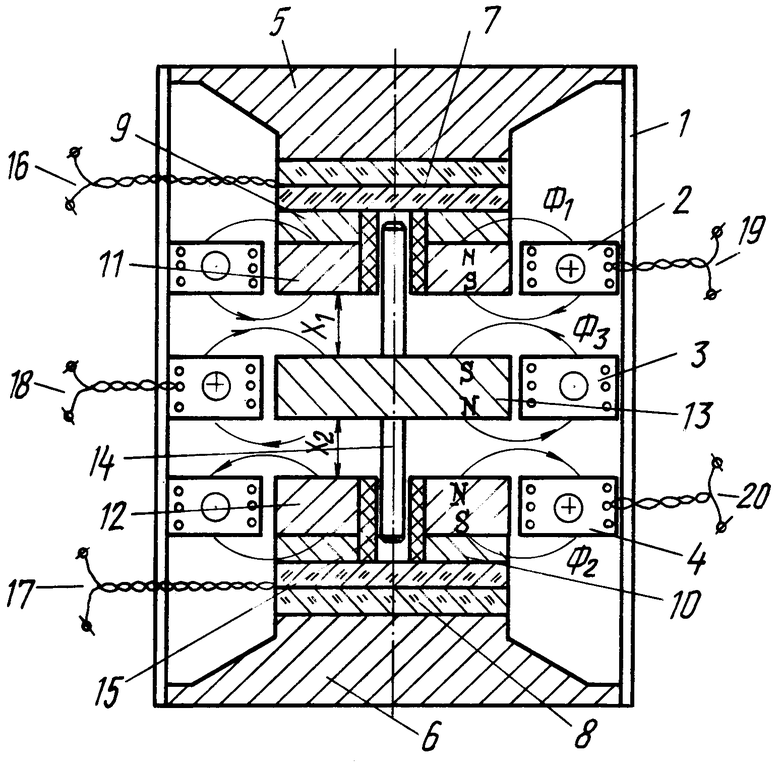
Пьезомагнитный геофон, содержащий корпус, индукционную катушку и постоянный магнит, отличающийся тем, что он снабжен еще двумя индукционными катушками, двумя постоянными магнитами и двумя пьезокерамическими элементами с накладками, при этом все три постоянных магнита расположены на одной оси одноименными полюсами друг к другу с образованием между ними двух межмагнитных расстояний Х1 и Х2 так, что средний магнит находится в магнитной подвеске с гибкостью С и с возможностью перемещения вдоль оси, причем каждый постоянный магнит размещен внутри своей неподвижной индукционной катушки, а пьезокерамические элементы с накладками также размещены на одной оси с постоянными магнитами и одной поверхностью через подложки они закреплены к постоянным магнитам, а второй поверхностью - к накладкам.
| Устройство для регистрации сейемических процессов | 1973 |
|
SU496519A1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2047189C1 |
| Пьезоэлектрический сейсмоприемник | 1987 |
|
SU1492333A1 |
| US 4285054, 18.08.1981 | |||
| Система для транспортирования суспензии от выемочной машины | 1975 |
|
SU993830A3 |
| ФУНКЦИОНАЛЬНАЯ СТРУКТУРА ПОСЛЕДОВАТЕЛЬНЫХ СКВОЗНЫХ ПЕРЕНОСОВ f(←←)и f(←←)УСЛОВНО "I" "ЗОНЫ ФОРМИРОВАНИЯ" ДЛЯ КОРРЕКТИРОВКИ РЕЗУЛЬТИРУЮЩЕЙ СУММЫ ПРЕДВАРИТЕЛЬНОГО СУММИРОВАНИЯ АКТИВНЫХ АРГУМЕНТОВ МНОЖИМОГО [m]f(2) ПОЗИЦИОННОГО ФОРМАТА В ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНОМ УМНОЖИТЕЛЕ f(Σ) (ВАРИАНТЫ) | 2010 |
|
RU2424550C1 |

