Изобретение относится к области измерительной техники и может быть использовано в системах тактильного очувствления промышленных роботов.
Известен магнитоупругий датчик усилия с монолитным сердечником ("Магнитоанизатропные монолитные силоизмерители", Машиностроение, 1981 г., авт. В.И. Шишкин, стр. 6).
Известный датчик содержит корпус, плоскую мембрану, трансформаторный преобразователь с одной намагничивающей и двумя измерительными обмотками, генератор переменного напряжения, входящий в измерительную цепь, и измерительный прибор. Генератор переменного напряжения включен в цепь намагничивающей обмотки, а измерительный прибор - в цепь измерительных обмоток, включенных встречно.
Датчик работает следующим образом. При отсутствии нагрузки (усилия) на мембране магнитный поток питающей обмотки разделяется на два равных магнитных потока, которые наводят в измерительных цепях ЭДС. Величины наводимых ЭДС при отсутствии усилия одинаковы, а выходное напряжение датчика практически равно нулю, т.к. обмотки включены встречно. При нагружении датчика с одной из сторон магнитный поток в одной из обмоток увеличивается, а в другой уменьшается. В результате этого значения наводимых в них ЭДС будут иметь разные значения, а с выхода датчика будет сниматься напряжение, значение которого зависит от величины прикладываемого усилия и измеряется измерительным прибором.
Недостатком известного датчика усилия являются его сложность и высокая нелинейность выходной характеристики, которая приводит к искажению результатов измерения. Кроме того, такой датчик не имеет возможности регулирования чувствительности.
Наиболее близким аналогом является емкостный датчик силы, который выбран за прототип (патент РФ 2065588). Емкостный датчик силы содержит размещенные на основании силовводящий элемент шаровой формы, упругий элемент, выполненный из двух одинаковых мембран, жестко соединенных до периферии, преобразователь перемещения с двумя электродами и защитным кольцом, подключенный к электронному блоку с операционным усилителем и компаратором напряжения.
В датчик введен термозависимый делитель напряжения, мембраны выполнены с жесткими центральными втулками, установленными соосно, каждая из втулок выступает по обе стороны соответствующей мембраны, во втулке одной из мембран выполнено углубление для силовыводящего элемента, втулка другой мембраны жестко закреплена в выполненной в основании датчика проточке, электроды емкостного преобразователя расположены в полости, образованной мембранами, каждый электрод жестко связан с соответствующей изолированной от него втулкой, при этом электроды соединены соответственно с инвертирующим входом и выходом операционного усилителя, выход которого соединен с инвертирующим входом компаратора напряжения, выход которого через термозависимый делитель напряжения подключен к инвертирующему входу операционного усилителя.
Недостатками емкостного датчика усилия является сложность конструкции.
Задачей изобретения является упрощение конструктивного исполнения.
Поставленная задача достигается тем, что предложенный датчик усилия состоит из корпуса, в верхней части которого выполнен фланец, в нижней - резьба: внутри корпуса размещены подвижный шток и постоянные магниты, ориентированные относительно друг друга одноименными полюсами, один из которых обладает возможностью продольного перемещения, а второй жестко закреплен в заглушке. В торце заглушки выфрезерован шлиц, и она посредством резьбы соединена с корпусом, верхняя поверхность фланца и торцевые поверхности магнитов покрыты электропроводным слоем и образуют два конденсатора с одной общей обкладкой, которая подсоединена к генератору переменного напряжения, а две другие обкладки соответственно соединены с входами выпрямителей, выходы которых через фильтры подключены к входу сумматора, а его выход - к усилителю. Корпус датчика выполнен из диэлектрического и немагнитного материала.
Один из постоянных магнитов закреплен в заглушке, которая имеет резьбу и может при вращении перемещаться поступательно в вертикальном направлении. Для осуществления перемещения в заглушке выфрезерован шлиц, благодаря этому, расстояние между магнитами может изменяться при ввинчивании и вывинчивании заглушки. Постоянные магниты обращены друг к другу одноименными полюсами, что приводит к образованию гарантированного зазора. При этом подвижный магнит может перемещаться при воздействии усилия на шток. Торцевые поверхности магнитов и фланца металлизированы и образуют обкладки дифференциального конденсатора, состоящего из С1 и С2. Емкость С1 образована между нижней металлизованной поверхностью подвижного магнита и верхней металлизованной поверхностью неподвижного магнита. Емкость С2 образована между металлизированной торцевой поверхностью фланца и верхней металлизированной поверхностью подвижного магнита. Торцевые поверхности подвижного магнита соединены между собой токопроводящей перемычкой, образуя общую обкладку конденсаторов. Она соединена выводами с генератором переменного напряжения. Две другие обкладки дифференциального конденсатора соединены со входами выпрямителей.
На фиг.1 приведена конструкция предлагаемого датчика усилия.
Датчик состоит из корпуса 1 с фланцем 2, внутри корпуса размещены шток 3, постоянные магниты 4 и 5, заглушка 6 с выполненным в ней шлицем 7. Верхняя поверхность фланца и торцевые поверхности покрыты злектропроводным слоем 8. Поверхности подвижного магнита подсоединены к генератору переменного напряжения 9. Поверхности фланца и второго магнита соответственно подсоединены к выпрямителям 10 и 11, которые в свою очередь через фильтры 12 и 13 подсоединены к сумматору 14. Сумматор подключен к усилителю 15.
Датчик усилия работает следующим образом.
При отсутствии усилия F на шток 3 постоянный магнит 4 под действием магнитных сил, возникающих в результате того, что постоянные магниты 4 и 5 обращены друг к другу одноименными полюсами, находится в крайнем верхнем положении. Это положение ограничивается для него диэлектрическим фланцем 2. В этом исходном состоянии емкости конденсаторов С1 и С2 определяются по формулам
где ξ1, ξ2 - диэлектрическая проницаемость емкостей С1 и С2,
S1 - площадь обкладок конденсатора С1,
S2 - площадь обкладок конденсатора С2,
l1 - расстояние между металлизированными слоями 8 обращенных друг к другу постоянных магнитов 4 и 5, образующих конденсатор С1;
l2 - расстояние между металлизированным слоем 8 постоянного магнита 4, обращенным к фланцу 2, и металлизированным слоем фланца, образующих конденсатор С2.
В исходном состоянии датчика при включении генератора 9 с обкладок конденсаторов С1 и С2 снимаются напряжения, которые подаются на выпрямители 10 и 11 (фиг.2). Выпрямители 10 и 11 использованы разнополярными, поэтому напряжения, снимаемые с их выходов, имеют разную полярность. С выходов выпрямителей 10 и 11 разнополярные напряжения подаются через фильтры 12 и 13 на вход сумматора 14. На выходе сумматора получим разность напряжений.
Вследствие того, что указанные емкости включены по дифференциальной схеме, можно настроить датчик усилия так, что в исходном состоянии при отсутствии усилия на шток напряжение на выходе сумматора 14 будет равно нулю. Такая настройка выполняется путем уменьшения расстояния l1. Для этого заглушку 6 с помощью шлица 7 перемещают в направлении подвижного магнита 4.
При воздействии усилия F на шток 3 магнит 4 будет приближаться к магниту 5. В результате этого расстояние l1 уменьшится, а расстояние l2 увеличится. Поэтому емкость С2 будет уменьшаться, а емкость С1 - увеличиваться. При этом изменяются и напряжения, снимаемые с выпрямителей 10 и 11 и подаваемые на вход сумматора 14 через фильтры 12 и 13. В результате этого на выходе сумматора 14 появляется разность напряжений, которая несет информацию о величине прикладываемого к штоку 3 усилия. Значение этого напряжения при настройке датчика может быть проградуировано в единицах, соответствующих прикладываемым усилиям. При снятии усилия F со штока 3 постоянный магнит 4 вернется в исходное положение под действием магнитных сил, создаваемых магнитами 4 и 5.
Предлагаемый датчик может быть настроен на работу и другим путем. При этом необходимо обеспечить нулевое значение напряжения на выходе сумматора 14 путем изменения коэффициентов усиления фильтров 12 и 13.
По сравнению с известным емкостным датчиком силы предлагаемый датчик усилия на основании вышеизложенного отличается простотой конструктивного исполнения. Упрощение конструкции обеспечивает датчику большую надежность и удобство в эксплуатации.

Изобретение относится к области измерительной техники и может быть использовано в системах тактильного очувствления промышленных роботов. Датчик состоит из полого корпуса 1, в верхней части которого выполнен фланец 2, в нижней - резьба. Внутри корпуса 1 размещены подвижный шток 3 и постоянные магниты 4, 5, ориентированные относительно друг друга одноименными полюсами. Один из магнитов обладает возможностью продольного перемещения, а второй жестко закреплен в заглушке 6. В торце заглушки 6 выфрезерован шлиц 7, и она посредством резьбы соединена с корпусом 1. Верхняя поверхность фланца 2 и торцевые поверхности магнитов 4, 5 покрыты металлизированным слоем и образуют два конденсатора с одной общей обкладкой, которая подсоединена к генератору 9 переменного напряжения, а две другие обкладки соответственно соединены с входами выпрямителей 10, 11, выходы которых через фильтры 12, 13 подключены к входу сумматора 14, а его выход - к усилителю 15. Корпус датчика выполнен из диэлектрического и немагнитного материала. Технический результат: упрощение конструкции. 2 ил.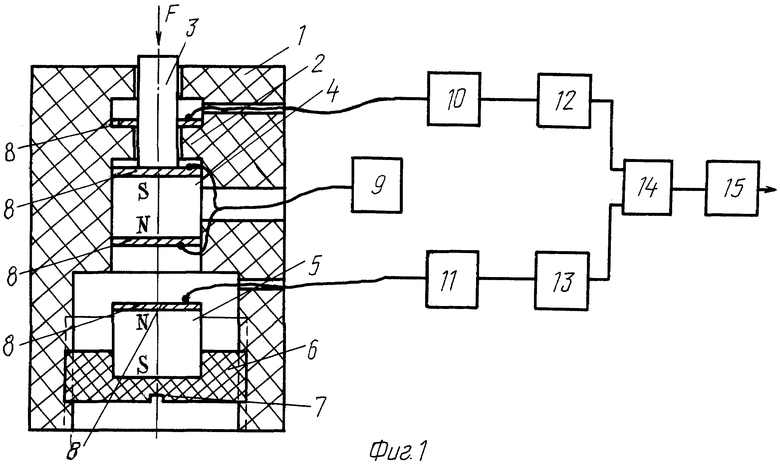
Датчик усилия, содержащий усилитель, отличающийся тем, что он состоит из корпуса, в верхней части которого выполнен диэлектрический фланец, в нижней - резьба, внутри корпуса размещены подвижный шток и постоянные магниты, ориентированные относительно друг друга одноименными полюсами, один из которых установлен с возможностью продольного перемещения под воздействием штока, а второй жестко закреплен в заглушке, в торце которой выфрезерован шлиц, и она посредством резьбы соединена с корпусом, верхняя поверхность фланца и торцевые поверхности магнитов покрыты металлизированным слоем и образуют два конденсатора с одной общей обкладкой, которая подсоединена к генератору переменного напряжения, а две другие обкладки соответственно соединены с входами выпрямителей, выходы которых через фильтры подключены к входу сумматора, а его выход - к усилителю.
| ГАЗОБАЛЛОННЫЙ ПИСТОЛЕТ ДЛЯ ВЫБРАСЫВАНИЯ ПОРОШКОВ | 1992 |
|
RU2065558C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНО-ЕМКОСТНОГО ПРЕОБРАЗОВАНИЯ УСИЛИЯ И ДАТЧИК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2093804C1 |
| RU 94039130 A1, 20.08.1996. | |||

