Предлагаемое изобретение относится к области измерительной техники и может быть использовано в системах диагностирования промышленных роботов.
Известен датчик линейного ускорения (справочник "Датчики контроля и регулирования", изд. Машиностроение, 1965 г., Д.И.Агейкин и др., стр.485-486, рис.IV. 26).
Известный датчик состоит из корпуса, инерционной массы, упруго закрепленной к корпусу через систему пружин с определенной жесткостью и через демпфер, создающий вязкое трение, потенциометрического преобразователя массы в электрическое напряжение, движок которого механически соединен с инерционной массой.
Известный датчик работает следующим образом.
При отсутствии ускорений масса, благодаря определенному натяжению пружины, располагается в среднем (нейтральном) положении. Если объект, на котором установлен датчик, движется с постоянным линейным ускорением, то масса перемещается на некоторую величину х, при которой инерционная сила Fин, возникающая вследствие ускоренного движения массы, в абсолютном пространстве, уравновешивается силой Fупр упругости пружины.
Для успокоения колебаний инерционной массы в переходном режиме служит демпфер, создающий силу, пропорциональную скорости перемещения массы относительно корпуса. Для получения электрического сигнала перемещение массы преобразуется в электрическое напряжение с помощью потенциометрического преобразователя.
Недостатком известного датчика является сложность и зависимость чувствительности от температуры окружающей среды, а также невозможность регулирования этой чувствительности.
Известен также датчик линейного ускорения индукционного типа (справочник "Датчики контроля и регулирования", изд. Машиностроение, 1965 г., Д.И.Агейкин и др., стр.485-486, рис.IV. 26).
Датчик содержит корпус, инерционную массу в виде цилиндра с поршнем, узел перемещения индукционного типа, содержащий катушку индуктивности с сердечником, один конец которого соединен с массой в форме цилиндра, пружину, прикрепленную одним концом к корпусу, а другим к цилиндру. Продольная ось цилиндра расположена параллельно оси движения объекта, линейное ускорение которого измеряют. Особенность его состоит лишь в том, что перемещение инерционной массы-цилиндра при воздействии ускорения передается на сердечник катушки индуктивности. В результате этого изменяется его положение относительно витков катушки индуктивности, с которой снимается напряжение.
Недостатком этого датчика является сложность и низкая чувствительность, обусловленная воздействием на модуль упругости температуры окружающей среды.
Наиболее близким техническим решением к предлагаемому устройству является датчик линейной скорости (патент RU № 2131127 С1).
Известный датчик состоит из корпуса, инерционной массы, упруго закрепленной к корпусу с помощью пружины и демпфера, создающего вязкое трение, емкостного преобразователя перемещения и усилителя, вход которого соединен с емкостным преобразователем. Последний представляет собой конденсатор, одной из обкладок которого является торцевая поверхность инерционной массы, а вторая - пластина, прикрепленная к корпусу.
Датчик линейной скорости содержит две параллельные магнитные системы, включенные встречно. Каждая система состоит из постоянного магнита, общего магнитопровода, двух пар катушек индуктивности. Подвижные катушки могут перемещаться в зазорах своих магнитных систем и включены дифференциально. Неподвижные катушки соединены дифференциально.
Недостатком этого датчика является сложность конструкции и невозможность регулирования чувствительности.
Задача изобретения - упрощение конструкции и обеспечение возможности регулирования чувствительности датчика.
Предложен датчик линейного ускорения, содержащий магнитную систему из двух постоянных магнитов, закрепленных в заглушках, на внутренней поверхности которых выполнена, например, резьба. Система помещена в корпус и пространство между магнитами заполнено вязкой жидкостью. Между магнитами установлен дополнительный третий магнит с возможностью свободного перемещения и ориентированный по отношению к ним одноименными полюсами. Торцевые поверхности третьего магнита и обращенные к ним поверхности других магнитов покрыты проводящим слоем, например слоем металла. Поверхности третьего магнита соединены между собой и включены в измерительную цепь.
Существенным является то, что в датчике устанавливают три постоянных магнита, которые расположены по одной оси. Два из этих магнитов закреплены неподвижно, а третий магнит является инерционной массой и имеет возможность линейного перемещения вдоль этой оси. Этот подвижный магнит расположен между двумя неподвижными магнитами и ориентирован по отношению к ним одноименными полюсами так, что вся система из трех магнитов будет находиться в статике в равновесии. При этом обращенные друг к другу проводящие торцевые поверхности магнитов образуют дифференциальный конденсатор измерительной цепи. Торцевые поверхности подвижного магнита выполняют роль общей обкладки дифференциального конденсатора, а две другие обкладки образованы торцевыми поверхностями неподвижных магнитов. Заглушки установлены с возможностью движения. Благодаря этому расстояние между магнитами может изменяться путем ввинчивания или вывинчивания заглушек. В результате этого можно регулировать чувствительность датчика. Для уменьшения демпфирования собственных колебаний зазор между корпусом и постоянными магнитами заполнен вязкой жидкостью.
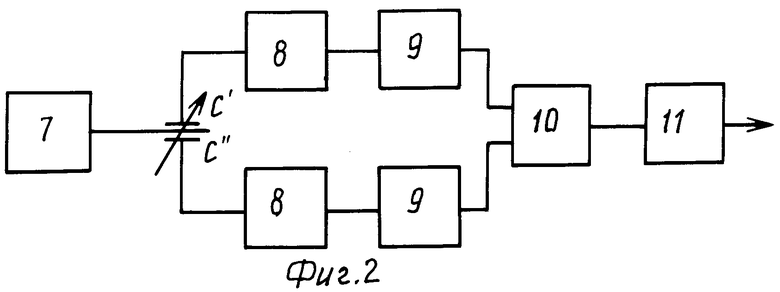
На фиг.1 приведена конструкция чувствительного блока предлагаемого датчика, на фиг.2 - блок-схема датчика линейного ускорения.
Конструкция датчика содержит корпус 1, постоянные магниты 2, 3 и 4, заглушки 5, 6 -выводы с обкладок дифференциального конденсатора.
В измерительную схему датчика входят генератор переменного напряжения 7, выпрямители 8, фильтры 9, сумматор 10 и усилитель 11.
Корпус 1 может быть выполнен в виде цилиндра из ударопрочной пластмассы. Постоянные магниты 2, 3 и 4 представляют собой цилиндры, если конструкция корпуса цилиндрическая, постоянные магниты 2 и 4 закреплены в заглушках 5, на внутренней поверхности которых выполнена резьба. Благодаря этому расстояние между магнитами 2, 3 и 4 может изменяться. Магниты 2, 3 и 4 обращены друг к другу одноименными полюсами. Магнит 3 имеет возможность свободно перемещаться в канале корпуса. В качестве жидкости использован, например, глицерин.
На торцевые поверхности магнита 3 нанесен слой металла. Торцевые поверхности магнита соединены между собой проводящей перемычкой Торцевые поверхности магнитов 2, 3 и 4 представляют собой обкладки дифференциального конденсатора, которые соединяются выводами с элементами измерительной цепи.
Генератор 7 соединен выводом 6 с общей обкладкой конденсаторов С1 и С11, которые образуют дифференциальный конденсатор. При помощи выводов 61 и 611 другие обкладки дифференциального конденсатора, образованные торцами постоянных магнитов 2 и 4, соединены с входами выпрямителей 8, которые подключены через фильтры 9 к входам сумматора 10.
При отсутствии ускорения постоянный магнит 3, который имеет возможность свободно перемещаться в канале корпуса 1, находится в положении равновесия между двумя другими постоянными магнитами 2 и 4. При этом между магнитами 2, 3 и 4 образуются зазоры, которые могут регулироваться путем ввинчивания и вывинчивания заглушек 5.
При действии ускорения в направлении, параллельном оси канала, в результате инерционной силы Fин нарушается баланс сил в системе из трех магнитов, которая вызывает перемещение магнита 3. Перемещение будет осуществляться до тех пор, пока не установится новое состояние равновесия. В результате перемещения магнита 3 изменяется расстояние между торцами магнитов 2 и 3 и 3 и 4, что приводит к изменению емкостей конденсаторов С1 и C11, образованных торцами указанных магнитов.
Инерционная сила Fин, возникающая вследствие ускоренного движения массы, уравновешивается магнитной силой Fупр, выражая эти силы через параметры датчика

где m - инерционная масса,
а - линейное ускорение
k - коэффициент упругости данной системы
из (1) получим ma=xk
Отсюда величина установившегося смещения массы определится как
где S - чувствительность датчика.
Из (2) следует, что
При изменении ускорения а, формула (3) будет иметь следующий вид

где Δx - изменение расстояния между торцами магнитов при изменении ускорения.
В результате перемещения постоянного магнита 3 относительно магнитов 2 и 4 изменяется и значение емкостей, которое определяется значением ΔС.
Значение емкостей можно выразить по формуле
где ε - диалектическая проницаемость, S0 - площадь торцов магнитов 2 и 4, х - расстояние между торцами.
Тогда  , откуда
, откуда 
где Δх - изменение расстояния между торцами магнитов при изменении ускорения.
При этом 
Очевидно, что изменения величин емкостей конденсаторов С1 и С11 будут иметь разные значения.
В результате этого будут изменяться напряжения, которые подаются на выпрямители 8. С выхода выпрямителей напряжения подаются на фильтры 9 и далее на входы сумматора 10. В результате вычитания этих напряжений на сумматоре с его выхода снимается напряжение, пропорциональное относительному изменению емкости дифференциального конденсатора и линейному ускорению, которое подается на усилитель 11.
Снимаемое напряжение с усилителя несет информацию об ускорении а и определяется по формуле

Подставляя (6) и (7) в (8) получим
Предлагаемый датчик ускорения отличается своей простотой и надежностью, т.к. не содержит механических элементов типа пружин, движущихся контактов, связывающих инерционную массу с потенциометрическим преобразователем. Конструкция датчика позволяет осуществлять регулировку чувствительности путем ввинчивания и вывинчивания заглушек. В известных датчиках такое простое регулирование отсутствует.
Предлагаемый датчик по конструкции легко реализовать на обычном производстве, при этом измерительная цепь содержит стандартные элементы, которые могут быть выполнены на базе известных схемных решений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УСИЛИЯ | 2001 |
|
RU2193762C1 |
| Схват промышленного робота | 1984 |
|
SU1291389A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УСКОРЕНИЯ | 2009 |
|
RU2401431C1 |
| Акселерометр | 1986 |
|
SU1363077A1 |
| Емкостный датчик перемещений | 2020 |
|
RU2750131C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2065572C1 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2009 |
|
RU2410703C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2002 |
|
RU2233451C2 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2014 |
|
RU2561303C1 |
| МНОГОКОМПОНЕНТНЫЙ СЕЙСМОПРИЕМНИК | 1994 |
|
RU2084003C1 |
Изобретение относится к области измерительной техники и может быть использовано в системах диагностирования промышленных роботов. Датчик содержит магнитную систему из двух постоянных магнитов, закрепленных в заглушках, на внутренней поверхности которых выполнена, например, резьба. Система помещена в корпус, и пространство между магнитами заполнено вязкой жидкостью. Между магнитами установлен дополнительный третий магнит с возможностью свободного перемещения и ориентированный по отношению к ним одноименными полюсами. Торцевые поверхности третьего магнита и обращенные к ним поверхности других магнитов покрыты проводящим слоем, например слоем металла. Поверхности третьего магнита соединены между собой и включены в измерительную цепь. Датчик ускорения отличается своей простотой и надежностью. Конструкция датчика позволяет осуществлять регулировку чувствительности путем ввинчивания и вывинчивания заглушек. 2 ил.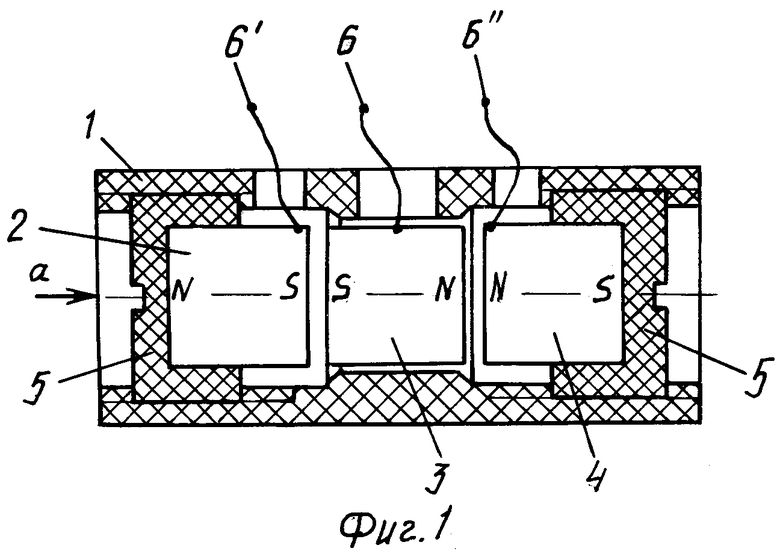
Датчик линейного ускорения, содержащий магнитную систему, состоящую из двух магнитов, установленных на одной оси, подключенную к измерительной цепи, отличающийся тем, что магниты закреплены в подвижных заглушках, пространство между ними заполнено вязкой жидкостью, в которой установлен третий магнит с возможностью свободного перемещения и ориентированный по отношению к двум неподвижным магнитам одноименными полюсами, причем торцевые поверхности магнитов, обращенные друг к другу, покрыты проводящим слоем, образуя дифференциальный конденсатор, обкладки которого включены в измерительную цепь, содержащую генератор переменного напряжения и два выпрямителя, подключенные через фильтры к входам сумматора, напряжение с выхода которого подается на усилитель, при этом генератор соединен с общей обкладкой дифференциального конденсатора, другие обкладки которого соединены со входами выпрямителей.
| ДАТЧИК ЛИНЕЙНОЙ СКОРОСТИ | 1997 |
|
RU2131127C1 |
| Способ измерения линейных ускорений и устройство для его осуществления | 1990 |
|
SU1831685A3 |
| Датчик линейных ускорений | 1976 |
|
SU564604A1 |
| JP 9264904 A, 07.10.1997. | |||

