Предлагаемое техническое решение относится к области радиолокации, в частности к области испытаний радиолокационных станций (РЛС), и может быть использовано для оценки технических характеристик РЛС при действии шумовых заградительных или прицельных по частоте активных шумовых помех, действующих по боковым лепесткам диаграммы направленности антенны (ДНА).
Известно, что наиболее достоверным способом оценки характеристик устройства является проведение испытаний (Натурный эксперимент: Информационное обеспечение экспериментальных исследований/ А.Н. Белюнов, Г.М. Солодихин, В. А. Солодовников и др. Под ред. Н.И. Баклашова. - М.:Радио и связь, 1982, с. 13-15). При создании РЛС испытания представляют собой технически и организационно сложный, дорогостоящий и продолжительный этап. Поэтому упрощение и удешевление этого процесса при обеспечении его достоверности является достаточно актуальной задачей, которая решается различными известными способами.
Так, например, известны способы оценки характеристик РЛС, использующие математическое моделирование сигналов и активных шумовых помех (Леонов А. И. , Васенев В. Н., Гайдуков Ю.И. Моделирование в радиолокации. - М.: Советское радио, 1979, с.25 - 31). Известные способы основаны на замене реальных сигналов, отраженных от радиолокационных объектов, и помех их математическими моделями. Моделируемые величины подаются в систему обработки РЛС вместо реальных сигналов. Недостаток использования этих способов состоит в необходимости обеспечения адекватности моделей реальным процессам, что требует тщательной калибровки моделей с использованием эталонных РЛС. Эти особенности применения указанных способов приводят к их значительному усложнению, а следовательно, и к удорожанию.
Наиболее близким к предлагаемому и широко используемым на практике является способ оценки характеристик РЛС, основанный на проведении испытаний, при которых создается реальная радиолокационная обстановка с радиолокационными отражающими объектами и активными помехами, производятся многократные измерения характеристик РЛС с последующей статистической обработкой результатов измерений (Леонов А.И., Леонов С.А., Нагулинко Ф.В. Испытания РЛС. Оценка характеристик. - М.: Радио и связь, 1990, с. 3, с. 25). В данном способе измерения проводятся по реальным радиолокационным отражающим объектам в реальных помеховых условиях. При этом радиолокационные отражающие объекты неподвижны и (или) перемещаются по заданным в испытаниях траекториям при заданных уровнях активных шумовых помех. По окончании испытаний проводят статистическую обработку полученных данных, усредняя измеренные значения характеристик РЛС по известным статистическим правилам, и принимают решение о соответствии полученных характеристик требуемым.
Таким образом, наиболее близкий к заявляемому способ оценки характеристик РЛС при действии активных шумовых помех заключается в создании радиолокационной обстановки с помощью неподвижных и (или) перемещающихся в зоне обзора РЛС радиолокационных отражающих объектов и источников активных шумовых помех, измерении характеристик РЛС при каждом угловом положении луча антенны в зоне обзора РЛС, последующей статистической обработке результатов измерений и принятии решения о соответствии полученных характеристик РЛС требуемым.
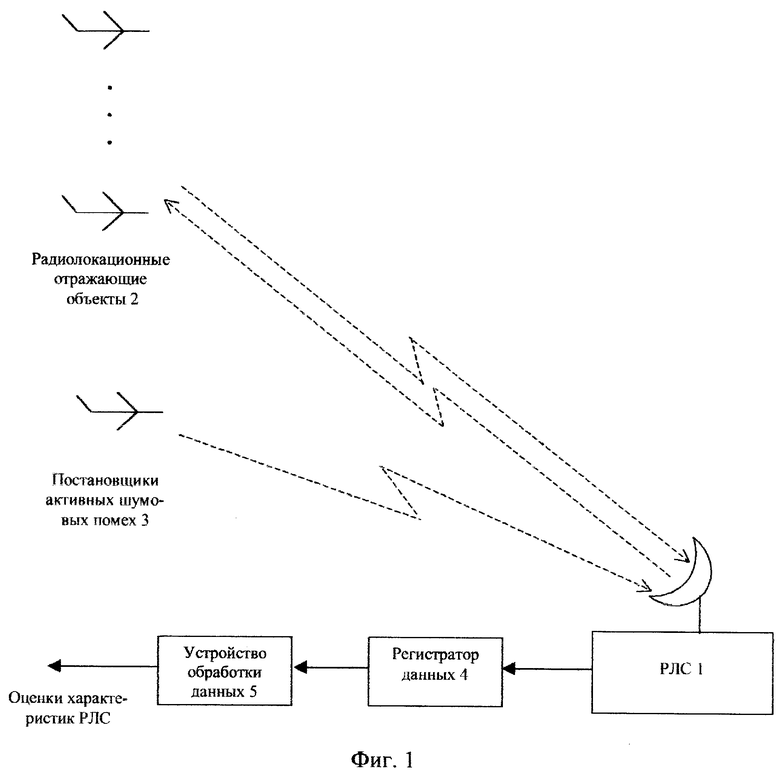
Устройство, реализующее известный способ (блок-схема устройства приведена на фиг. 1), содержит РЛС 1, радиолокационные отражающие объекты 2 (один или более), постановщики активных помех 3 (один или более), регистратор данных 4, устройство обработки данных 5. При этом выход РЛС 1 соединен со входом регистратора данных 4, выход которого в свою очередь соединен с устройством обработки данных 5.
Устройство, реализующее известный способ, работает следующим образом. Для оценки характеристик РЛС 1 при действии активных шумовых помех в зоне ее обзора с помощью одного или нескольких радиолокационных отражающих объектов 2 и постановщиков активных помех 3 создается радиолокационная обстановка, соответствующая заданной для испытаний. При этом радиолокационные отражающие объекты 2 перемещаются по заданным в испытаниях траекториям. Постановщики активных помех 3 также перемещаются по заданным траекториям и излучают активные шумовые помехи заданного уровня. РЛС 1 обнаруживает и измеряет координаты радиолокационных отражающих объектов 2. Измеренные координаты и другая информация с выхода испытываемой РЛС 1 (информация об используемых зондирующих сигналах, о включенных устройствах защиты от помех и т.п.) поступают в регистратор данных 4, где преобразуются в вид, пригодный для обработки, и запоминаются. В устройстве обработки данных 5 производится статистическая обработка результатов измерений и определяются окончательные усредненные оценки характеристик РЛС 1.
Однако такой способ оценки характеристик РЛС имеет ряд недостатков, основные из них - высокая стоимость и большая продолжительность проведения измерений. Это связано с тем, что испытание такого сложного устройства как РЛС связано с целым комплексом дорогостоящих организационных и технических мероприятий, включающих как подготовку и обеспечение работы самой РЛС, аппаратуры регистрации и оценку результатов испытания, так и обеспечение полетов радиолокационных отражающих объектов в зоне обзора по заданным траекториям при одновременном действии активных шумовых помех. При этом для создания помех при каждом испытании требуется привлечение специальных постановщиков помех и (или) наземного помехового комплекса. С учетом того, что для получения достоверных результатов измерения должны проводиться многократно, стоимость и продолжительность испытаний становятся чрезвычайно большими. Кроме того, при большом числе измерений практически невозможно достичь хорошей повторяемости условий проведения испытаний, что крайне важно для их последующей статистической обработки и получения достоверных выводов о результатах испытаний.
Решаемой задачей таким образом является снижение стоимости, продолжительности, количества, а также обеспечение высокой повторяемости экспериментов при проведении испытаний РЛС в условиях действии активных шумовых помех.
Поставленная задача решается за счет разделения процесса измерения характеристик РЛС на два независимых этапа: измерений по реальным радиолокационным отражающим объектам в беспомеховых условиях и измерения суммарной мощности активных шумовых помех и собственных шумов на выходе РЛС при действии активных шумовых помех. Оценки характеристик РЛС при действии активных шумовых помех определяют затем по результатам раздельно полученных измерений.
Указанный технический результат достигается тем, что:
- в известном способе оценки характеристик РЛС при действии активных шумовых помех, заключающемся в создании радиолокационной обстановки с помощью неподвижных и (или) перемещающихся в зоне обзора РЛС радиолокационных отражающих объектов и источников активных шумовых помех, измерении характеристик РЛС при различных угловых положениях луча антенны в зоне обзора РЛС, последующей статистической обработке результатов измерений, принятии решения о соответствии полученных характеристик требуемым, согласно изобретению, производят раздельное измерение характеристик РЛС при отсутствии активных шумовых помех и измерение суммарной мощности активных шумовых помех и собственных шумов на выходе РЛС при действии активных шумовых помех, по результатам упомянутых измерений определяют характеристики РЛС при действии активных шумовых помех;
- оценку дальности обнаружения радиолокационного отражающего объекта при действии активных шумовых помех определяют путем уменьшения измеренной дальности при отсутствии активных шумовых помех в  раз, а оценку точности измерения угловых координат объекта при действии активных шумовых помех - путем уменьшения измеренной точности при отсутствии активных шумовых помех в
раз, а оценку точности измерения угловых координат объекта при действии активных шумовых помех - путем уменьшения измеренной точности при отсутствии активных шумовых помех в  раз, где (Pпвых(εп-εл, βп-βл)+Pш) - измеренная суммарная мощность активных шумовых помех и собственных шумов на выходе РЛС; εл и βл - координаты луча антенны по углу места и азимуту соответственно; εп и βп - координаты источника активных шумовых помех по углу места и азимуту соответственно;
раз, где (Pпвых(εп-εл, βп-βл)+Pш) - измеренная суммарная мощность активных шумовых помех и собственных шумов на выходе РЛС; εл и βл - координаты луча антенны по углу места и азимуту соответственно; εп и βп - координаты источника активных шумовых помех по углу места и азимуту соответственно;
- при использовании зондирующих сигналов РЛС, отличающихся от зондирующих сигналов, при которых проводились измерения, оценки дальности обнаружения объекта и точности измерения угловых координат изменяют соответственно в  раз, где k - относительное изменение отношения мощности сигнала к мощности шума при изменении зондирующего сигнала.
раз, где k - относительное изменение отношения мощности сигнала к мощности шума при изменении зондирующего сигнала.
Указанный технический результат достигается также тем, что:
- в известном способе оценки характеристик РЛС при действии активных шумовых помех, заключающемся в создании радиолокационной обстановки с помощью неподвижных и (или) перемещающихся в зоне ответственности РЛС источников активных шумовых помех, измерении характеристик РЛС при различных угловых положениях луча антенны в зоне обзора РЛС, последующей статистической обработке результатов измерений, принятии решения о соответствии полученных характеристик требуемым, согласно изобретению, для оценки точности пеленгации источника активных помех производят раздельное измерение точности пеленгации в радиолокационной обстановке с одним постановщиком активных помех и измерение суммарной мощности активных шумовых помех и собственных шумов на выходе РЛС при действии активных шумовых помех только по боковым лепесткам и фону диаграммы направленности антенны (ДНА) РЛС, по результатам упомянутых измерений определяют точность пеленгации источника активных помех при действии активных шумовых помех по боковым лепесткам и фону ДНА РЛС;
- оценку точности пеленгации источника активных помех при действии активных шумовых помех по боковым лепесткам и фону ДНА РЛС определяют путем уменьшения измеренной точности при отсутствии активных шумовых помех по боковым лепесткам и фону ДНА в  раз, где Pпвых(εп-εл, βп-βл)+Pш - измеренная суммарная мощность активных шумовых помех и собственных шумов на выходе РЛС; εл и βл - координаты луча антенны по углу места и азимуту соответственно; εп и βп - координаты источника активных шумовых помех по углу места и азимуту соответственно, действующих по боковым лепесткам и фону ДНА.
раз, где Pпвых(εп-εл, βп-βл)+Pш - измеренная суммарная мощность активных шумовых помех и собственных шумов на выходе РЛС; εл и βл - координаты луча антенны по углу места и азимуту соответственно; εп и βп - координаты источника активных шумовых помех по углу места и азимуту соответственно, действующих по боковым лепесткам и фону ДНА.
Фиг.1 - блок-схема устройства, реализующего известный способ.
Фиг. 2 - блок-схема устройства, реализующего заявляемый способ на этапе проведения измерений и оценки характеристик РЛС в беспомеховых условиях.
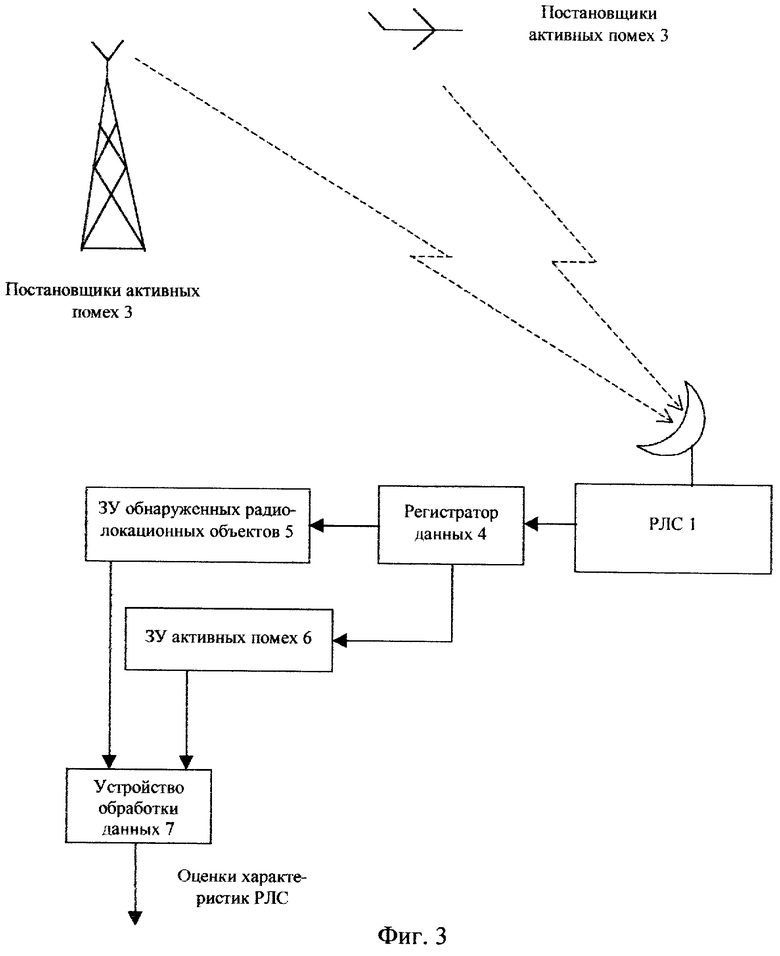
Фиг. 3 - блок-схема устройства, реализующего заявляемый способ на этапе измерения суммарной мощности активных шумовых помех и собственных шумов на выходе РЛС.
Суть предлагаемого способа состоит в следующем.
Известно, что при обнаружении радиолокационного отражающего объекта (цели) при действии активных шумовых помех, статистические свойства которых близки к статистическим свойствам собственных шумов приемника, на выходе РЛС происходит сложение принимаемых помех и собственных шумов по мощности (Рп и Рш соответственно). При этом вид зависимостей дальности обнаружения и точностей измерения координат радиолокационного отражающего объекта сохраняется подобным соответствующим зависимостям при обнаружении на фоне собственных шумов, где в выражении для отношения мощности принимаемого сигнала (Рс) к мощности шумов (Рш) вместо мощности шумов используется суммарная мощность шумов и активных шумовых помех, т.е. вместо отношения Рс/Рш в выражении используется отношение:
Pc/(Pп+Pш). (1)
При использовании различных известных устройств подавления активных помех (корреляционного автокомпенсатора активных помех, устройства дискретно-фазовой адаптации - многошагового формирования "провалов" в ДНА в направлениях на помехи, перестройки несущей частоты зондирующих сигналов РЛС) активные шумовые помехи, действующие по боковым лепесткам и фону ДНА РЛС, влияния на главный луч ДНА практически не оказывают. Поэтому зависимость вида (1) и в этом случае оказывается справедливой (только вместо мощности помех Pп, подставляется мощность неподавленной части помех на выходе РЛС), т.е. имеем отношение:
Pc/(Pпвых(εп-εл, βп-βл)+Pш). (2)
Мощность неподавленной части активных шумовых помех на выходе РЛС зависит от углового положения постановщика помех (с координатами εп, βп) относительно положения луча антенны (с координатами εл, βл). Суммарные величины на выходе РЛС Pпвых(εп-εл, βп-βл)+Pш измеряются при различных угловых положениях луча антенны и постановщика активных помех, для различных заданных помеховых условий. Указанные измерения могут проводиться в любое, независимое от времени других испытаний РЛС время и затем многократно использоваться.
С учетом того, что дальность обнаружения радиолокационного отражающего объекта прямо пропорциональна корню четвертой степени, а точности измерения координат (дальности и угловых) - корню квадратному отношения сигнал/шум по мощности Рс/Рш (Бартон Д. и Вард Г. Справочник по радиолокационным измерениям. Пер. с англ. под ред. М.М. Вейсбина. - М., "Сов. радио", 1976, с. 100, 46), дальность обнаружения Рп+ш радиолокационного отражающего объекта при действии активных шумовых помех через дальность ее обнаружения Рш на фоне собственных шумов данной РЛС (при одинаковых вероятностях правильного обнаружения) вычисляется в виде:
а шумовая среднеквадратическая ошибка измерения координат (дальности и угловых координат) σп+ш на фоне помех через шумовую ошибку σш на фоне шумов в виде:
Таким образом, оценки характеристик РЛС в активных шумовых помехах при каждом положении луча антенны РЛС могут быть получены с использованием выражений (3) и (4) после проведения независимо друг от друга измерений характеристик РЛС по обнаружению радиолокационных отражающих объектов и измерений суммарной мощности помех и собственных шумов на выходе РЛС. При проведении обоих измерений параметры зондирующих сигналов РЛС и систем подавления помех не должны изменяться (пункты 1 и 2 формулы изобретения).
Дополнительной возможностью сокращения количества испытаний при оценке характеристик РЛС является применение принципа раздельных измерений для получения оценок характеристик РЛС при обнаружении радиолокационных отражающих объектов с использованием зондирующих сигналов, отличающихся от зондирующих сигналов, используемых при реальных измерениях (пункт 3 формулы изобретения). В предлагаемом способе для получения оценки характеристик РЛС необходимо заранее определить изменение в оцениваемой характеристике, которое дает применение другого зондирующего сигнала относительно зондирующего сигнала, при котором произведены измерения (величина k). Измерение этой величины для конкретной РЛС является известной операцией и проводится один раз в лабораторных условиях (т.е. без выхода в эфир).
Принцип раздельного измерения параметров PЛC и помех с последующим получением оценки характеристики РЛС при действии помех использован и при оценке точности пеленгации постановщиков активных помех при действии шумовых помех по боковым лепесткам и фону ДНА (пункты 4 и 5 формулы изобретения). В этом случае при одном из измерений производится оценка точности пеленгации постановщика активных помех в условиях, когда помехи но боковым лепесткам и фону ДНА отсутствуют, а при другом измеряется суммарная мощность активных шумовых помех и собственных шумов на выходе системы подавления помех при их действии по боковым лепесткам и фону ДНА (различных по мощности и положению относительно положения луча антенны РЛС). Оценка точности пеленгации постановщика активных помех при мешающем действии активных шумовых помех по боковым лепесткам и фону ДНА затем вычисляется путем уменьшения соответствующей точности, полученной при измерении в условиях отсутствия мешающих помех в  раз, где Pпвых(εп-εл, βп-βл)+Pш - суммарная мощность мешающих активных шумовых помех и собственных шумов на выходе РЛС при положении луча антенны в положении с координатами εл по углу места и βл по азимуту и при угловом положении мешающего источника активных шумовых помех в положении с координатами εп по углу места и βп по азимуту.
раз, где Pпвых(εп-εл, βп-βл)+Pш - суммарная мощность мешающих активных шумовых помех и собственных шумов на выходе РЛС при положении луча антенны в положении с координатами εл по углу места и βл по азимуту и при угловом положении мешающего источника активных шумовых помех в положении с координатами εп по углу места и βп по азимуту.
Устройство, реализующее предлагаемый по п. 1 способ (фиг.2, 3), содержит РЛС 1, радиолокационные отражающие объекты 2 (один или более), постановщики активных помех 3 (один или более), регистратор данных 4, запоминающее устройство (ЗУ) обнаруженных радиолокационных объектов 5, ЗУ активных помех 6, устройство обработки данных 7, причем выход РЛС 1 подключен к регистратору данных 4, два выхода которого соединены с ЗУ обнаруженных радиолокационных объектов 5 и ЗУ активных помех 6, выходы которых соединены с устройством обработки данных 7.
Устройство работает следующим образом. В зоне обзора РЛС 1 с помощью радиолокационных отражающих объектов 2 создается радиолокационная обстановка, при которой радиолокационные отражающие объекты перемещаются по заданным траекториям. Активные помехи при этом не ставятся (фиг. 2). РЛС 1 производит осмотр зоны обзора, и при обнаружении радиолокационного отражающего объекта 2 его координаты, мощность принимаемого сигнала в моменты обнаружения записываются в ЗУ обнаруженных радиолокационных объектов 5.
Во время, не совпадающее со временем проведения указанных ранее измерений, в зоне обзора РЛС 1 с помощью неподвижных и (или) перемещающихся по заданным траекториям постановщиков помех создается заданная для испытаний радиолокационная обстановка, включающая только активные помехи. При каждом положении луча антенны измеряется суммарная мощность активных помех и собственных шумов на выходе РЛС 1 (фиг. 3). Параметры зондирующих сигналов и систем подавления помех при проведении обоих измерений устанавливаются одинаковыми. Измеренные величины на выходе РЛС 1, угловые положения луча антенны в моменты измерения записываются в ЗУ активных помех 6.
По окончании обоих измерений в устройстве обработки данных 7 производится сопоставление полученных данных по радиолокационным отражающим объектам 2, поступающих из ЗУ обнаруженных радиолокационных объектов 5, и уровням активных шумовых помех, излучаемых постановщиками активных шумовых помех 3, из ЗУ активных помех 6, и выбираются данные, соответствующие совпадающим положениям луча антенны. Значения характеристик РЛС 1 для каждого положения луча антенны вычисляются с помощью выражений (3) и (4). Полученные данные затем усредняются и выдаются как оценки характеристик РЛС.
Предлагаемое техническое решение относится к области радиолокации, в частности к области испытаний радиолокационных станций (РЛС). Достигаемым техническим результатом является снижение стоимости, продолжительности, количества, а также обеспечение высокой повторяемости экспериментов при проведении испытаний РЛС в условиях действий активных шумовых помех. Указанный технический результат достигается тем, что в известном способе оценки характеристик РЛС при действии активных шумовых помех, заключающемся в создании радиолокационной обстановки с помощью неподвижных и (или) перемещающихся в зоне обзора РЛС радиолокационных отражающих объектов и источников активных шумовых помех, измерении характеристик РЛС при различных угловых положениях луча антенны в зоне обзора РЛС, последующей статистической обработке результатов измерений, принятии решения о соответствии полученных характеристик требуемым, согласно изобретению, производят раздельное измерение характеристик РЛС при отсутствии активных шумовых помех и измерение суммарной мощности активных шумовых помех и собственных шумов на выходе РЛС при действии активных шумовых помех, по результатам упомянутых измерений определяют характеристики РЛС при действии активных шумовых помех, в том числе оценку дальности обнаружения, радиолокационного отражающего объекта при действии активных шумовых помех. Указанный технический результат достигается также тем, что в известном способе оценки характеристик РЛС при действии активных шумовых помех, заключающемся в создании радиолокационной обстановки с помощью неподвижных и (или) перемещающихся в зоне ответственности РЛС источников активных шумовых помех, измерении характеристик РЛС при различных угловых положениях луча антенны в зоне обзора РЛС, последующей статистической обработке результатов измерений, принятии решения о соответствии полученных характеристик требуемым, согласно изобретению, для оценки точности пеленгации источника активных шумовых помех производят раздельное измерение точности пеленгации в радиолокационной обстановке с одним постановщиком активных помех и измерение суммарной мощности активных шумовых помех и собственных шумов на выходе РЛС при действии активных шумовых помех только по боковым лепесткам и фону диаграммы направленности антенны (ДНА) РЛС, по результатам упомянутых измерений определяют точность пеленгации источника активных шумовых помех при действии активных шумовых помех по боковым лепесткам и фону ДНА РЛС. 2 с. и 1 з.п.ф-лы, 3 ил.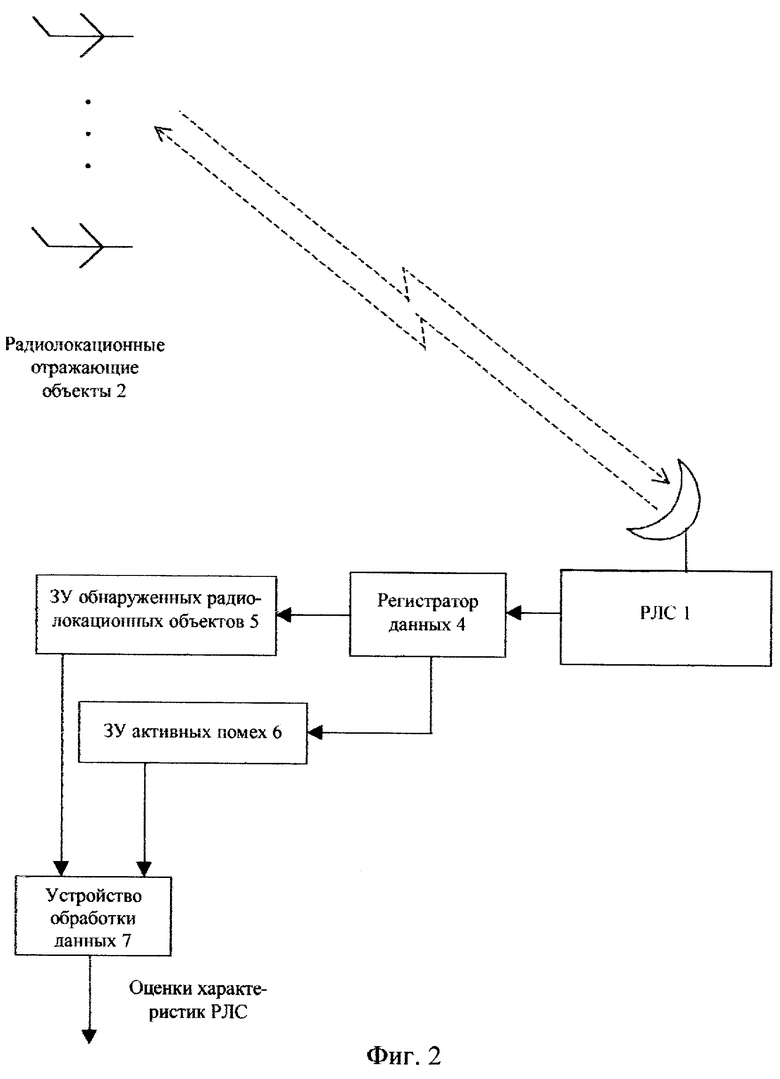
 раз, а оценку точности измерения угловых координат отражающего объекта при действии активных шумовых помех путем уменьшения измеренной точности при отсутствии активных шумовых помех в
раз, а оценку точности измерения угловых координат отражающего объекта при действии активных шумовых помех путем уменьшения измеренной точности при отсутствии активных шумовых помех в  где (Pпвых(εп-εл, βп-βл)+Pш)- измеренная суммарная мощность активных шумовых помех и собственных шумов на выходе РЛС; εл и βл- координаты луча антенны по углу места и азимуту соответственно; εп и βп- координаты источника активных шумовых помех по углу места и азимуту соответственно.
где (Pпвых(εп-εл, βп-βл)+Pш)- измеренная суммарная мощность активных шумовых помех и собственных шумов на выходе РЛС; εл и βл- координаты луча антенны по углу места и азимуту соответственно; εп и βп- координаты источника активных шумовых помех по углу места и азимуту соответственно. раз, где k - относительное изменение отношения мощности сигнала к мощности шума при изменении зондирующего сигнала.
раз, где k - относительное изменение отношения мощности сигнала к мощности шума при изменении зондирующего сигнала. где (Pпвых(εп-εл, βп-βл)+Pш- измеренная суммарная мощность активных шумовых помех и собственных шумов на выходе РЛС; εл и βл- координаты луча антенны по углу места и азимуту соответственно, εп и βп- координаты источника активных шумовых помех по углу места и азимуту соответственно, действующих по боковым лепесткам и фону ДНА.
где (Pпвых(εп-εл, βп-βл)+Pш- измеренная суммарная мощность активных шумовых помех и собственных шумов на выходе РЛС; εл и βл- координаты луча антенны по углу места и азимуту соответственно, εп и βп- координаты источника активных шумовых помех по углу места и азимуту соответственно, действующих по боковым лепесткам и фону ДНА.
| ЛЕОНОВ А.И | |||
| и др | |||
| Испытания РЛС | |||
| Оценка характеристик | |||
| - М.: Радио и связь, 1990, с.3 и 25 | |||
| АДАПТИВНЫЙ ОБРАЩАЮЩИЙ ФИЛЬТР | 1994 |
|
RU2086999C1 |
| US 5173700 A, 22.12.1992 | |||
| US 5359329 A, 25.10.1994 | |||
| Излучатель колебаний | 1981 |
|
SU977051A2 |

