Изобретение относится к области радиолокации и может быть использовано в импульсных радиолокационных станциях (РЛС) различных типов (обзорных, многофункциональных и др.), оснащенных активными фазированными антенными решетками (АФАР), для решения задачи селекции целей на фоне многократных ответно-импульсных помех, воздействующих по главному лепестку диаграммы направленности (ДН) АФАР.
Одним из эффективных способов радиоэлектронного подавления импульсных РЛС является применение многократных ответно-импульсных помех (МОИП), постановка которых осуществляется постановщиками активных помех (ПАП) [1-4]. Как правило, такие помехи представляют собой серию разомкнутых импульсов, излучаемых в ответ на прием каждого либо выборочного количества зондирующих импульсов подавляемой РЛС. При этом МОИП создаёт на выходе подсистемы первичной обработки радиолокационной информации (РЛИ) и на экране индикатора РЛС целеподобные отметки как запаздывающие, так и опережающие целевой эхо-сигнал по временной задержке. Высокая эффективность применения МОИП обеспечивается при их постановке по главному лепестку ДН антенной решетки (АР), что существенно затрудняет обнаружение целевых эхо-сигналов, определение угловых координат ПАП и прикрываемых ими целей. В этих условиях трудности обнаружения, координатных измерений и сопровождения истинных целей усугубляет фактор обнаружения и завязки множества ложных трасс, что обуславливает перегрузку соответствующих информационных каналов РЛС [1-4].
Применение известных способов селекции МОИП, основанных на использовании различий временной и (или) частотной структуры импульсов помехи и целевых эхо-сигналов [5 с. 132-147, 6 с. 281-289], для решения рассматриваемой задачи не эффективно, так как сигнал МОИП представляет собой копию отраженного сигнала. Более конструктивным является реализация способов селекции, основанных на использовании различий в направлении прихода целевых эхо-сигналов и МОИП. Это обусловлено тем, что импульсные элементы МОИП формируются пространственно-локализованным точечным источником помеховых сигналов - ПАП. Ключевым вопросом реализации этих способов является обеспечение достаточности качества углового разрешения источников радиолокационных сигналов и точности измерений их угловых координат. При обеспечении указанной достаточности становится возможным по степени локализации области воздействия помеховых сигналов на плоскости угловых измерений идентифицировать факт постановки РЛС помех типа МОИП, определить угловые координаты постановщика помех и отселектировать прикрываемые цели по признаку невязки оценок угловых координат постановщика помех и обнаруженных целей.
Известен способ подавления импульсных помех, воздействующих по боковым лепесткам ДН антенной решетки [6 с. 289]. Указанный способ применим и для подавление МОИП, принимаемых по боковым лепесткам ДН антенной решетки. Однако, при воздействии МОИП по главному лепестку ДН АФАР радиоэлектронная защита РЛС в соответствии с этим способом не обеспечивается.
Также известен широко применяемый РЛС различных типов способ амплитудной моноимпульсной пеленгации целей по максимуму интенсивности сигнала, принимаемого по главному лепестку ДН АР [7 с. 287, 8 с. 66-106, 9 с. 30]. В соответствии с этим способом РЛС при обзоре пространства производится непрерывное либо дискретное сканирование главным лепестком ДН АР, приём и обработка локационных сигналов в соответствии с алгоритмом моноимпульсной пеленгации. Для модели радиолокационных сигналов (1), принимаемых системой излучателей АР осуществляется поиск максимума функции 

где 


K - число источников радиоизлучения;









Вектор-строка сигнала 

где 


Функция (2) представлена на фиг.1 штриховой линией. Для примера, здесь и далее по тексту предполагается, что электронное сканирование пространства осуществляется плоской АР размерностью 40х40 элементов, расстояние d между элементами АР равно половине длины волны, что соответствует 5 см, в секторе электронного сканирования ±10° по азимуту относительно нормали к плоскости АР находятся один постановщик МОИП (ПАП - 1) и прикрываемая им цель (Ц - 2).
Функция 



Недостаток способа амплитудной моноимпульсной пеленгации заключается в том, что при его применении в условиях неразрешения двух и более источников радиолокационных сигналов ни по одной из оцениваемых координат затруднено их раздельное наблюдение с определением местонахождения обнаруженных целей. Этот недостаток особо характерен для обзорных РЛС с традиционно широкими лучами АР на передачу и приём. Отмеченная недостаточность углового разрешения может повлечь:
- возможное маскирование помехой целевых эхо-сигналов, как показано на фиг.1;
- невозможность идентифицировать факт постановки МОИП по признаку группирования импульсных элементов МОИП в окрестности истинного пеленга на воздействующий ПАП;
- низкую эффективность селекции целей на фоне МОИП по признаку невязки получаемых низкоточных оценок угловых измерений обнаруженных целей с низкоточной оценкой истинного пеленга на одиночный ПАП либо группу ПАП;
- возможную перегрузку РЛС задачами обнаружения и сопровождения ложных трасс.
Известен принятый в качестве прототипа способ и реализующий его алгоритм углового сверхразрешения Кейпона [10 с.202]. Их достоинствами являются применимость в активных приёмных АР любой конфигурации, не критичность к априорной неопределённости относительно количества и местонахождения пеленгуемых источников радиоизлучений и приемлемый для современных разработок АФАР объём вычислительных затрат [9-12].
Алгоритм Кейпона заключается в оценке корреляционной матрицы (КМ) анализируемых сигналов с выходов отдельно взятых приёмных элементов АР либо её малоразмерных антенных подрешеток

где 




Далее, вычисляется матрица обратная оцененной КМ 

Заключительным этапом алгоритма является вычисление функции:

Полученная зависимость представлена на фиг. 1 сплошной линией для тактической ситуации и параметров АР, аналогичных рассмотренным для способа амплитудной пеленгации по максимуму ДН АР. Данная зависимость называется пеленгационным рельефом (ПР) [10].
Реализация алгоритмов углового сверхразрешения предполагает в качестве входного помехового воздействия стохастический сигнал в виде непрерывной активной шумовой помехи [9-12]. В рассматриваемом случае предполагается обработка многократной копии детерминированного целевого эхо-сигнала. Поэтому, как показали ниже приведенные результаты модельных исследований, разрешение локальных максимумов ПР, соответствующих истинному угловому положению воздействующих ПАП, при использовании в алгоритме Кейпона в качестве входного помехового сигнала МОИП, не представляется возможным по причине низкого реализуемого качества ПР. Как следствие, недостаток выбранного в качестве прототипа способа и реализующего его алгоритма заключается в том, что обеспечиваемое качество ПР (сверхрелеевского разрешения его локальных максимумов) при воздействии МОИП не позволяет с точностью (далее по тексту - высокой точностью), достаточной для селекции целевых эхо-сигналов на фоне помеховых, определить направления приема помеховых сигналов, принимаемых по главному лепестку ДН АР.
Техническим результатом настоящего предложения является реализация возможности высокоточной пеленгации постановщиков МОИП.
Технический результат достигается тем, что в способе высокоточной пеленгации постановщика многократной ответно-импульсной помехи, воздействующей на радиолокационную станцию с активной фазированной антенной решеткой, который заключается в раздельном диаграммообразующем векторном суммировании принимаемых сигналов с выходов элементов антенной решетки в составе примыкающих друг к другу вертикальных антенных подрешеток, оценке корреляционной матрицы просуммированных сигналов, вычислении обратной корреляционной матрицы, расчете управляющих векторов, расчете пеленгационного рельефа и поиске его локальных максимумов, а также диаграммообразующем векторном суммировании сигналов с выходов всех элементов полноразмерной антенной решетки, обработке суммарного сигнала в согласованном с зондирующим сигналом фильтре, его пороговой обработке и оценивании временной задержки сигналов первичного обнаружения, согласно изобретения, перед оценкой корреляционной матрицы просуммированных сигналов с выходов вертикальных антенных подрешеток, производится их обработка в согласованном с зондирующим сигналом фильтре и временное выделение путем перемножения с временными стробами, формирование которых производится с использованием полученных оценок временной задержки сигналов первичного обнаружения.
Физическая суть предлагаемого способа заключается в следующем. Приемная АР условно делится на примыкающие друг к другу вертикальные антенные подрешётки. Указанный принцип деления АР на вертикальные подрешетки обусловлен рядом факторов, главными из которых являются:
- как правило, объекты радиолокационного наблюдения (цели и ПАП) преимущественно распределены по азимутальной координате, в силу чего информативной является азимутальная пеленговая информация;
- для обеспечения высокого качества ПР необходимо максимизировать реализуемое отношение помеха/шум в анализируемых сигналах с выходов антенных подрешеток;
- для снижения вычислительных затрат на реализацию алгоритма углового сверхразрешения необходимо допустимо снизить количество независимых каналов приёма (излучателями всей АР либо её малоразмерными антенными подрешетками) сигналов объектов радиолокационного наблюдения.
В последнем случае сигналы с выходов отдельно взятых элементов АР, входящих в состав её малоразмерных вертикальных антенных подрешёток, подвергаются согласованному с заданным направлением ориентации луча АФАР векторному суммированию. Математическая модель сигналов на выходе АР, являющихся аддитивной смесью эхо-сигналов цели и МОИП, может быть представлена в виде:

где 

эхо-сигналов цели и МОИП на выходе l-ой подрешетки;












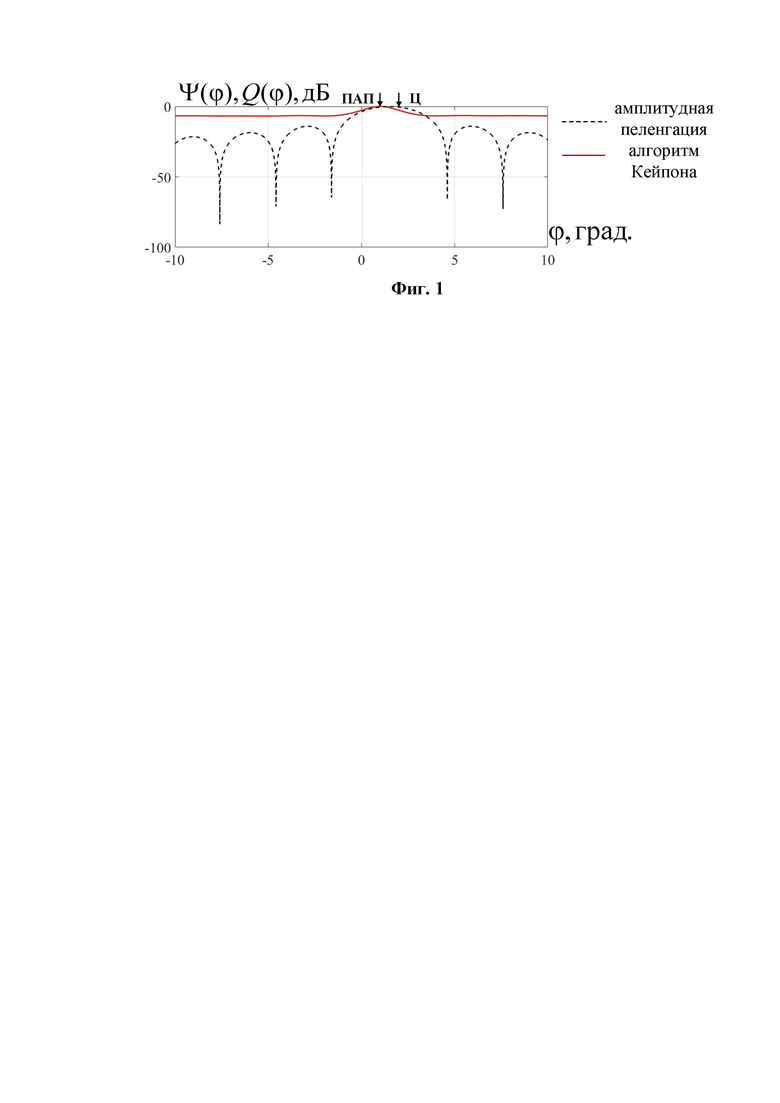
Между разомкнутыми импульсными элементами МОИП объективно существуют свободные от помех межимпульсные интервалы (фиг.2 а,б). Указанные интервалы являются неинформативными, так как преимущественно содержат внутриканальные шумы и возможные нескомпенсированные остатки пассивных и активных помех. Это обуславливает возникновение амплитудно-фазовых ошибок измерений помеховой корреляционной матрицы. Данные ошибки приводят к рассогласованию управляющего вектора 


где 






Количество столбцов и, соответственно, элементов в составе вертикальной антенной подрешетки значительно меньше чем в полноразмерной АР. Поэтому, энергетический уровень сигналов с выходов вертикальных антенных подрешёток 



Профильтрованные сигналы с выходов вертикальных антенных подрешёток после их стробирования (см. фиг.2 в) далее используются для оценки КМ:

где 

Далее, вычисляется матрица обратная оцененной КМ 

Заключительным этапом разработанного способа является расчет ПР:

На фиг.3 сплошной линией представлен ПР для предлагаемого способа, штриховой - для алгоритма Кейпона.
Решение о воздействии на РЛС МОИП принимается по оценке наличия в сформированном ПР одного или нескольких остроугольных максимумов:

где 

Информация о направлении воздействия на РЛС постановщика МОИП 


Изобретение иллюстрируется следующими чертежами.
На фиг.1 штриховой линией показана результирующая зависимость для способа амплитудной пеленгации по максимуму ДН АР, сплошной - ПР для алгоритма Кейпона.
На фиг.2 показаны результаты согласованной обработки и стробирования сигналов первичного обнаружения: фиг.2 а - результат согласованной обработки суммарного сигнала с выхода полноразмерной АР; фиг.2 б - результат согласованной обработки просуммированного сигнала с выхода вертикальной антенной подрешетки, а так же штриховыми линиями поясняется порядок назначения временных стробов; фиг.2 в - результат перемножения сигналов первичного обнаружения, обработанных в согласованном с зондирующим сигналом фильтре, с временными стробами на выходе вертикальной антенной подрешетки.
На фиг.3 штриховой линией показан ПР для алгоритма Кейпона, сплошной - для способа высокоточной пеленгации постановщика МОИП.
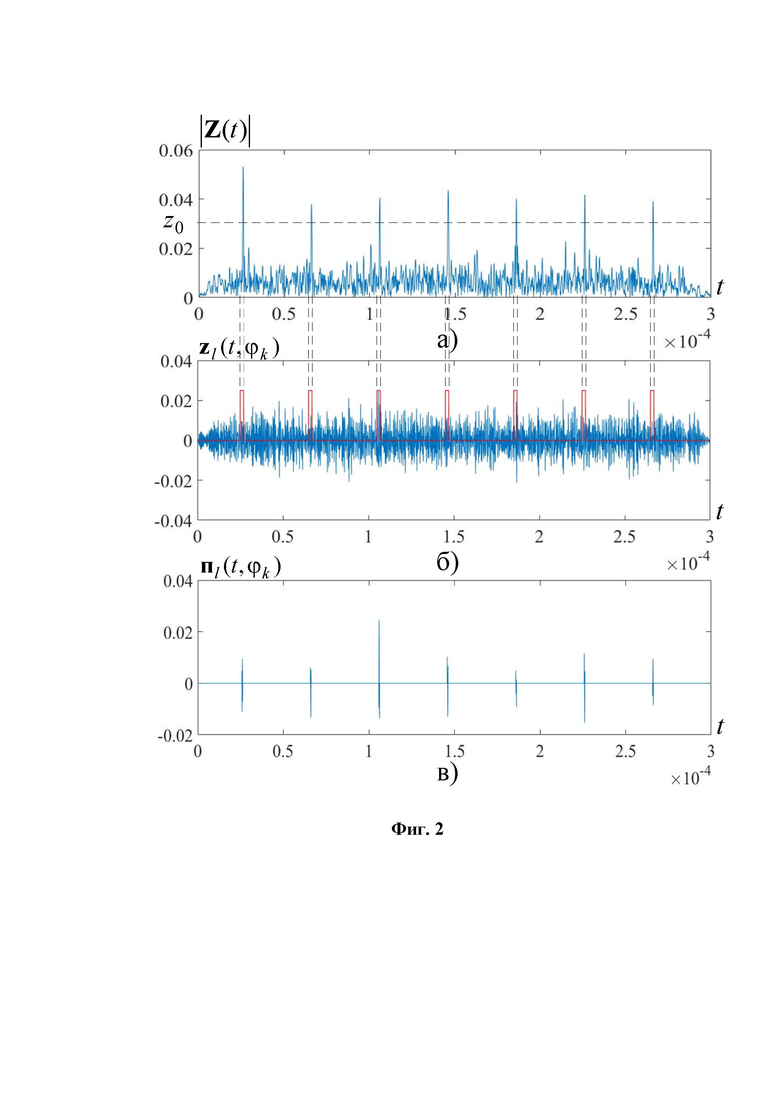
На фиг.4 показана разностная ДН АР с провалом в направлении воздействия постановщика МОИП.
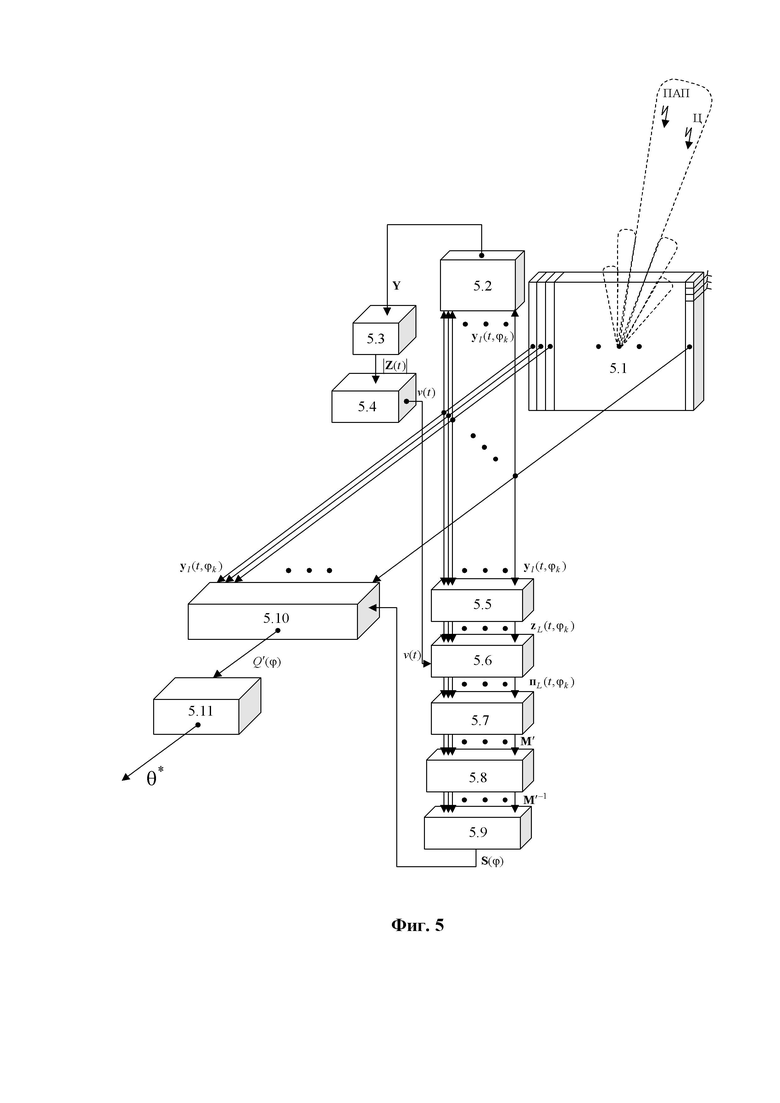
На фиг. 5 приведено блок-схемное построение подсистемы приёма и обработки радиолокационных сигналов, реализующей вышеизложенный способ. На фиг. 5 приняты следующие обозначения:
5.1 АФАР с показом принципа её деления на вертикальные антенные подрешетки;
5.2. Блок диаграммообразующего векторного суммирования сигналов с выходов всех элементов полноразмерной антенной решетки;
5.3. Блок обработки суммарного сигнала в согласованном с зондирующим сигналом фильтре;
5.4. Блок пороговой обработки и оценивания временной задержки сигналов первичного обнаружения;
5.5. Блок обработки просуммированных сигналов с выходов вертикальных антенных подрешеток в согласованном с зондирующим сигналом фильтре;
5.6. Блок временного выделения просуммированных сигналов с выходов вертикальных антенных подрешеток;
5.7. Блок оценки корреляционной матрицы;
5.8. Блок вычисления обратной корреляционной матрицы;
5.9. Блок расчета управляющего вектора;
5.10. Блок расчета ПР;
5.11. Блок пороговой обработки ПР.
Для упрощения показа блок-схемного построения подсистемы приёма и обработки радиолокационных сигналов, реализующей вышеизложенный способ, на фиг. 5 не приведены функциональные блоки раздельного диаграммообразующего векторного суммирования принимаемых сигналов с выходов элементов антенной решетки в составе примыкающих друг к другу вертикальных антенных подрешеток.
На фиг.6 показана зависимость ширины ПР для способа высокоточной пеленгации постановщика многократной ответно-импульсной помехи от количества импульсных элементов МОИП с направления воздействия ПАП для различных отношений сигнал/шум (ОСШ) по мощности.
На фиг. 7 сплошными кривыми показаны потенциальные ошибки измерений угловых координат (границы Крамера-Рао) для способа высокоточной пеленгации постановщика многократной ответно-импульсной помехи, штриховыми - расчетные. Зависимости представлены для следующих ОСШ по мощности: 



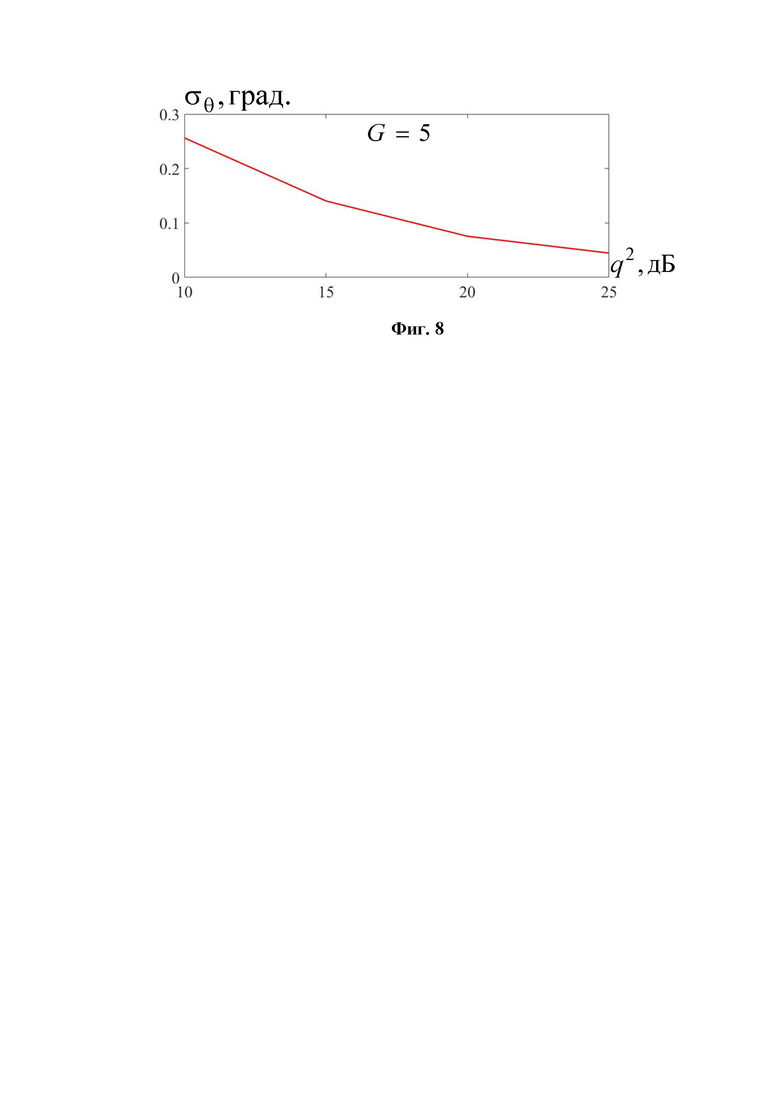
На фиг. 8 показана зависимость ошибок измерения угловых координат для способа высокоточной пеленгации постановщика многократной ответно-импульсной помехи от ОСШ по мощности при фиксированном количестве импульсных элементов МОИП (
Осуществление способа возможно с помощью блок-схемы представленной на фиг. 5 и заключается в последовательном выполнении следующих операций:
1. Условное деление АФАР на вертикальные антенные подрешётки. Принцип деления на вертикальные антенные подрешетки поясняется блоком 5.1;
2. Диаграмообразующее векторное суммирование сигналов, принимаемых полноразмерной антенной решеткой, осуществляемое блоком 5.2;
3. Обработка суммарного сигнала в согласованном с зондирующим сигналом фильтре, осуществляемая блоком 5.3;
4. Пороговая обработка и оценивание временной задержки сигналов первичного обнаружения, осуществляемые блоком 5.4;
5. Раздельное диаграммообразующее векторное суммирование принимаемых сигналов с выходов элементов антенной решетки в составе примыкающих друг к другу вертикальных антенных подрешеток (7);
6. Обработка просуммированных сигналов с выходов вертикальных антенных подрешеток в согласованном с зондирующим сигналом фильтре (8,9), осуществляемая блоком 5.5;
7. Временное выделение просуммированных сигналов с выходов вертикальных антенных подрешеток, обработанных в согласованном с зондирующим сигналом фильтре, путем перемножения с временными стробами (10,11), осуществляемое блоком 5.6. Формирование временных стробов производится блоком 5.4. с использованием полученных оценок временной задержки сигналов первичного обнаружения (12).
8. Оценка корреляционной матрицы по стробированным профильтрованным сигналам с выходов вертикальных антенных подрешеток (13) в блоке 5.7;
9. Вычисление обратной корреляционной матрицы в блоке 5.8;
10. Расчет управляющих векторов, описывающих плоский волновой фронт с различными значениями фазы, зависящими от направления прихода анализируемого сигнала, осуществляемый блоком 5.9;
11. Расчет пеленгационного рельефа (14), осуществляемый блоком 5.10;
12. Поиск локальных максимумов пеленгационного рельефа (15), осуществляемый блоком 5.11.
Заявленный технический результат подтвержден результатами, полученными методом имитационного моделирования.
Для рассмотренных выше исходных данных оценена эффективность пеленгации постановщика МОИП, которая определяется разрешающей способностью по угловым координатам и ошибками измерения угловых координат [4,8]. Как правило, разрешающая способность РЛС по угловым координатам определяется шириной ДН АР по уровню -3 дБ [8]. В данном случае, ширине ДН АР ставится в соответствие ширина максимума ПР. Зависимости ширины максимума ПР 



где 


На фиг. 7 сплошными кривыми показаны потенциальные ошибки пеленгации постановщика МОИП (границы Крамера-Рао) [6], штриховыми - расчетные. Зависимости представлены для следующих ОСШ по мощности:
На фиг.8 эффективность для разработанного способа показана зависимостью ошибок измерения угловых координат от ОСШ по мощности при фиксированном количестве импульсных элементов МОИП (
Анализ результатов имитационного моделирования заявляемого способа для приведенных выше исходных данных показал, что:
1. Разрешающая способность по угловым координатам для разработанного способа определяется количеством импульсных элементов МОИП с направления воздействия ПАП и для рассмотренных исходных данных в зависимости от количества импульсных элементов МОИП составляет 

2. Расчетные ошибки измерения угловых координат постановщика МОИП при увеличении количества МОИП приближаются к потенциальным и для различных ОСШ по мощности на выходе порядка 10…25 дБ составляют 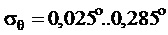
На основании полученных оценок можно констатировать, что разработанный способ обеспечивает возможность реализации в РЛС с активной фазированной антенной решеткой пеленгации постановщиков многократных ответно-импульсных помех с ошибками измерения угловой азимутальной координаты ПАП
Список литературы
1. Ван Брант, Л. Б. Справочник по методам радиоэлектронного подавления и помехозащиты систем с радиолокационным управлением. США. [Текст] / Л. Б. Ван Брант. 1978: пер. с англ. под ред. К. И. Фомичева, Л. М. Юдина, т. 1, 5 кн. - М.: Воениздат, 1985. - 1079 с.
2. Перунов, Ю. М. Радиоэлектронное подавление информационных каналов систем управления оружием [Текст] / Ю. М. Перунов, К. И. Фомичев, Л. М. Юдин, под ред. Ю. М. Перунова. - М.: Радиотехника, 2008. - 416 с.
3. Куприянов, А. И. Радиоэлекторнная борьба. Основа теории [Текст] / А.И. Куприянов, Л.Н. Шустов. - 2-е изд. - М.: Вузовская книга, 2015. - 800 с.
4. Евграфов, В. Г. Развитие авиационных средств РЭБ и их применение в современных вооруженных конфликтах [Текст] / В. Г. Евграфов // Зарубежное военное обозрение. - 2011. - №2. - С. 60 - 65.
5. Защита от радиопомех [Текст] / М.В. Максимов, М. П. Бобнев, Б. Х. Кривицкий и др., под ред. М. В.Максимова М.: Сов. радио, 1976. - 496 с.
6. Ботов, М. И. Основы теории радиолокационных систем и комплексов [Текст] / М. И. Ботов, В. А. Вяхирев, под ред. М. И. Ботова. - Красноярск: Сиб. федер. ун-т, 2013. - 530 с.
7. Теоретические основы радиолокации [Текст] / Я. Д. Ширман, В. Н. Голиков, И.Н. Бусыгин и др., под ред. Я. Д. Ширмана. - М.: Сов. Радио, 1970. - 560 с.
8. Леонов, А. И. Моноимпульсная радиолокация [Текст] / А.И. Леонов, К.И. Фомичев. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1984. - 312 с.
9. Ермолаев, В. Т. Методы оценивания параметров источников сигналов и помех, принимаемых антенной решеткой [Текст] / В.Т. Ермолаев, А.Г. Флаксман, учебно - методический материал по программе повышения квалификации «Новые подходы к проблемам генерации, обработки, передачи, хранения, защиты информации и их применение». - Нижний Новгород : 2007. - 98 с.
10. Ратынский, М. В. Адаптация и сверхразрешение в антенных решетках [Текст] / М. В. Ратынский. - М.: Радио и связь, 2003. - 200 с.
11. Монзинго, Р. А. Адаптивные антенные решетки. Введение в теорию [Текст] / Р. А. Монзинго, Т. У. Миллер, пер. с англ. под общей редакцией В. А. Лексаченко. - М. : Радио и связь, 1986. - 448 с.
12. Чижов, А. А. Сверхрэлеевское разрешение. Т. 1: Классический взгляд на проблему [Текст] / А.А. Чижов. - М. : КРАСАНД, 2010. - 96 с.



Изобретение относится к области радиолокации и может быть использовано в импульсных радиолокационных станциях различных типов (обзорных, многофункциональных и др.), оснащенных активными фазированными антенными решетками, для решения задачи селекции целей на фоне многократных ответно-импульсных помех, воздействующих по главному лепестку диаграммы направленности активной фазированной антенной решетки. Достигаемый технический результат - реализация возможности высокоточной пеленгации постановщиков многократной ответно-импульсной помехи. Указанный технический результат достигается тем, что в способе высокоточной пеленгации постановщика многократной ответно-импульсной помехи, воздействующей на радиолокационную станцию с активной фазированной антенной решеткой, который заключается в раздельном диаграммообразующем векторном суммировании принимаемых сигналов с выходов элементов антенной решетки в составе примыкающих друг к другу вертикальных антенных подрешеток, оценке корреляционной матрицы просуммированных сигналов, вычислении обратной корреляционной матрицы, расчете управляющих векторов, расчете пеленгационного рельефа и поиске его локальных максимумов, а также диаграммообразующем векторном суммировании сигналов с выходов всех элементов полноразмерной антенной решетки, обработке суммарного сигнала в согласованном с зондирующим сигналом фильтре, его пороговой обработке и оценивании временной задержки сигналов первичного обнаружения, перед оценкой корреляционной матрицы просуммированных сигналов с выходов вертикальных антенных подрешеток производится их обработка в согласованном с зондирующим сигналом фильтре и временное выделение путем перемножения с временными стробами, формирование которых производится с использованием полученных оценок временной задержки сигналов первичного обнаружения. 8 ил.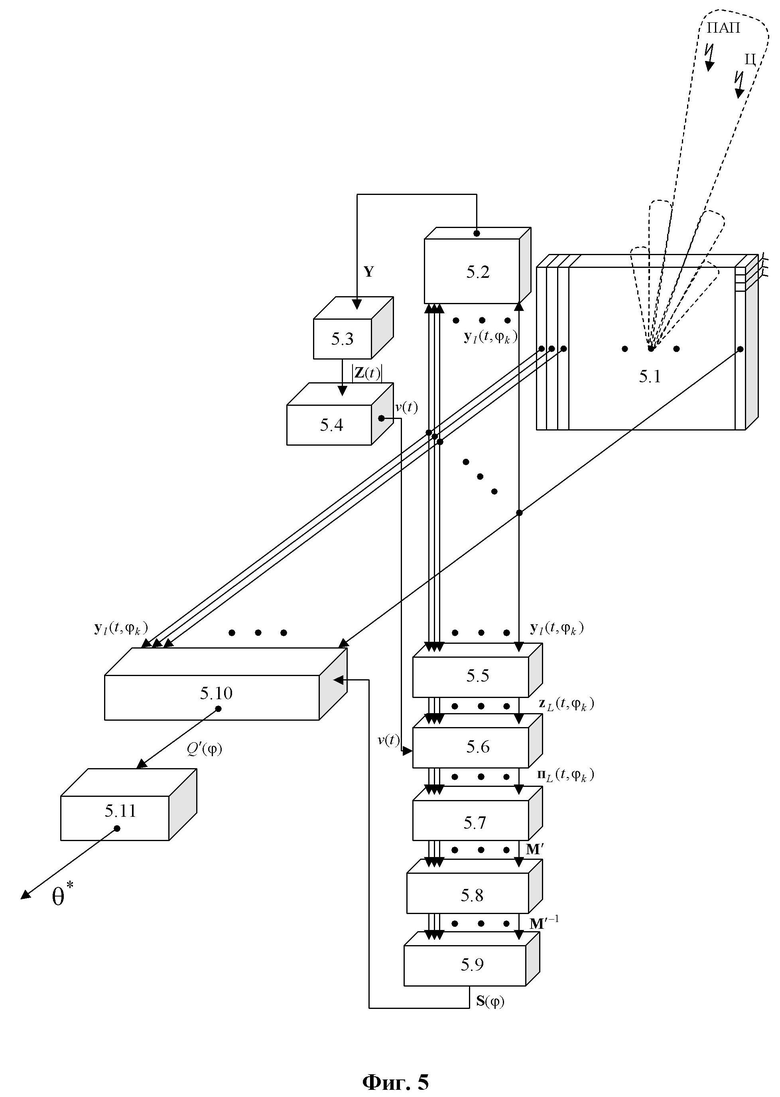
Способ высокоточной пеленгации постановщика многократной ответно-импульсной помехи, воздействующей на радиолокационную станцию с активной фазированной антенной решеткой, заключающийся в раздельном диаграммообразующем векторном суммировании принимаемых сигналов с выходов элементов антенной решетки в составе примыкающих друг к другу вертикальных антенных подрешеток, оценке корреляционной матрицы просуммированных сигналов, вычислении обратной корреляционной матрицы, расчете управляющих векторов, расчете пеленгационного рельефа и поиске его локальных максимумов, а также диаграммообразующем векторном суммировании сигналов с выходов всех элементов полноразмерной антенной решетки, обработке суммарного сигнала в согласованном с зондирующим сигналом фильтре, его пороговой обработке и оценивании временной задержки сигналов первичного обнаружения, отличающийся тем, что перед оценкой корреляционной матрицы просуммированных сигналов с выходов вертикальных антенных подрешеток производится их обработка в согласованном с зондирующим сигналом фильтре и перемножение главных локальных максимумов профильтрованных сигналов с временными стробами прямоугольной формы, заданными функцией
где 


| РАТЫНСКИЙ М | |||
| В., Адаптация и сверхразрешение в антенных решетках, Радио и связь, Москва, 2003 | |||
| ЕГОРОВ В.А и др., Исследование алгоритма Кейпона в задачах обнаружения активных помех, Компьютерные инструменты в образовании, 2011, N3 | |||
| WILLIAM ROBERTS et al, Iterative Adaptive Approaches to MIMO Radar Imaging, IEEE Journal of Selected Topics in |

