Изобретения относятся к области радиолокации и могут использоваться в одноканальных (однолучевых) радиолокационных станциях (РЛС) для пеленгации постановщиков активных помех (ПАП) в процессе обзора пространства.
Известно, что активные помехи (АП) представляют серьезную угрозу РЛС. Одним из способов борьбы с АП является определение угловых координат постановщиков АП (пеленгация ПАП) и уничтожение ПАП боевыми средствами. В связи с чем к достоверности пеленгов ПАП предъявляются весьма высокие требования.
Известным способом одноканальной пеленгации ПАП в процессе обзора пространства является способ одноканальной пеленгации, заключающийся в перемещении диаграммы направленности антенны (ДНА) одноканальной (однолучевой) РЛС по одной из угловых координат при одновременном измерении уровня АП. Значение угловой координаты в момент максимума уровня АП считают значением пеленга ПАП по измеряемой координате (Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Сов. радио, 1964, с.46).
Известное устройство пеленгации активных помех, реализующее известный способ, содержит антенну и соединенный с ней приемник с измерителем уровня принимаемого сигнала (Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Сов. радио, 1964, с.48, рис.2.21а).
Недостатком известных технических решений является возможность пеленгации ПАП только по одной угловой координате. Вторая координата ПАП может быть измерена после измерения первой.
Наиболее близким способом пеленгации постановщиков активных помех является способ одноканальной пеленгации в процессе обзора пространства, включающий пеленгацию ПАП в каждом положении луча антенны РЛС и измерение соответствующих уровней АП (Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Сов. радио, 1978, с.260-262).
Наиболее близкой по технической сущности к заявляемой является РЛС (фиг.1), содержащая антенну 1, приемник 2, пороговое устройство 3, синхронизатор 4 и блок оценки угловых координат 5, при этом выход антенны 1 соединен со входом приемника 2, выход которого соединен со входом порогового устройства 3, выход порогового устройства 3 и координатный выход антенны 1 соединены соответственно с первым и вторым входами блока оценки угловых координат 5, при этом блок оценки угловых координат 5 включает запоминающее устройство 6, блок формирования угловых пакетов 7 и вычислитель 8, причем первый и второй входы запоминающего устройства 6 являются первым и вторым входами блока оценки угловых координат 5 соответственно, выход синхронизатора 4 соединен с синхровходом запоминающего устройства 6, М выходов запоминающего устройства 6 соединены с М входами блока формирования угловых пакетов 7, М выходов которого соединены с М входами вычислителя 8, выход вычислителя 8 является выходом РЛС (патент РФ 2291466).
Работа наиболее близкой к заявляемой РЛС при измерении угловых координат цели происходит следующим образом.
Излучение постановщиков АП принимаются антенной 1, поступают в приемник 2 и далее на вход порогового устройства 3, где сравниваются с порогом обнаружения, который задается исходя из допустимой вероятности ложных тревог. Превысившие уровень порога сигналы АП (пеленги) с выхода порогового устройства 3 и сигналы, пропорциональные угловым координатам луча антенны 1, поступают в блок оценки угловых координат 5. Амплитуды и угловые координаты обнаруженных АП (пеленгов) по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство 6 и хранятся там. По окончании каждого периода обзора по командам синхронизатора из запоминающего устройства 6 извлекаются записанные в них данные и подаются в блок формирования угловых пакетов 7, где происходит объединение пеленгов в угловые пакеты исходя из условия отсутствия пропусков сигналов одновременно по обеим угловым координатам (фиг.2). Угловые координаты пакетов пеленгов поступают на М входов вычислителя 8, где вычисляются угловые координаты ПАП (в соответствии с патентом РФ №2291466). Угловые координаты ПАП выдаются на выход РЛС.
Недостатком наиболее близких технических решений является большое количество ложных пеленгов ПАП. Это объясняется тем, что активные помехи, обнаруженные боковыми лепестками и фоном ДНА, относят к направлению главного лепестка ДНА и выдают на выход РЛС как пеленги ПАП. По сформированным таким образом ложным пеленгам ПАП отрабатывают средства защиты от АП, например боевые средства уничтожения ПАП, которые при этом нацеливаются на несуществующие объекты.
Решаемой задачей (техническим результатом), таким образом, является уменьшение количества ложных пеленгов постановщиков активных помех при обеспечении высокой вероятности обнаружения истинных пеленгов.
Указанный результат достигается тем, что в способе одноканальной пеленгации постановщиков активных помех (ПАП) в процессе обзора пространства, включающем пеленгацию ПАП в каждом положении луча антенны РЛС и измерение соответствующих уровней АП, согласно изобретению угловые положения луча, в которых произошла пеленгация ПАП (пеленги ПАП), и соответствующие уровни АП запоминают и формируют по ним угловые пакеты пеленгов ПАП, после чего по угловым пакетам пеленгов ПАП, размер которых превышает единицу, вычисляют угловые координаты ПАП, а угловые пакеты пеленгов ПАП, размер которых равен единице, принимают за угловые пакеты ложных пеленгов.
Указанный результат достигается также тем, что в радиолокационной станции, содержащей антенну, приемник, пороговое устройство, синхронизатор и блок оценки угловых координат, при этом выход антенны соединен со входом приемника, выход которого соединен со входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами блока оценки угловых координат, при этом блок оценки угловых координат включает запоминающее устройство, блок формирования угловых пакетов и вычислитель, причем первый и второй входы запоминающего являются первым и вторым входами блока оценки угловых координат соответственно, выход синхронизатора соединен с синхровходом запоминающего устройства, М выходов запоминающего устройства соединены с М входами блока формирования угловых пакетов, выход вычислителя является выходом блока оценки угловых координат, который является выходом РЛС, согласно изобретению в блок оценки угловых координат введен блок анализа угловых пакетов пеленгов, М входов которого соединены с М выходами блока формирования угловых пакетов, а М его выходов соединены с М входами вычислителя.
Суть заявляемого технического решения заключается в следующем.
Известно, что если мощность активной помехи достаточно велика, то ее воздействие на РЛС может происходить не только по главному лепестку ДНА, но и по боковым лепесткам. Однако поскольку уровень главного лепестка ДНА значительно превышает уровни боковых лепестков, а его ширина в 2-2.5 раза больше ширины любого бокового лепестка, то при расположении ПАП в области главного лепестка (т.е. когда пеленги ПАП истинные) АП обнаруживается преимущественно в нескольких ближайших положениях луча. При расположении ПАП в области только боковых лепестков или фона ДНА (т.е. когда пеленг ПАП ложный) обнаружение АП в нескольких положениях луча подряд практически не происходит. Это свойство обнаружения (пеленгации) ПАП используется в изобретении.
При реализации изобретения из пеленгов постановщиков АП в плоскости угол места - азимут формируются угловые пакеты пеленгов ПАП. В такие пакеты объединяются угловые положения луча (пеленги ПАП), в которых произошло обнаружение АП в нескольких положениях луча подряд (фиг.2).
Поскольку угловой пакет пеленгов ПАП формируется одновременно по обеим угловым координатам, то по такому пакету могут быть определены сразу обе угловые координаты ПАП (патент РФ №2291466).
Таким образом, угловые координаты ПАП вычисляют (в соответствии, например, со способом, изложенным в патенте РФ №2291466) только для угловых пакетов пеленгов, состоящих из нескольких положений луча, т.е. когда размер углового пакета пеленгов ПАП превышает единицу. Если угловой пакет пеленгов ПАП состоит только из одного направления (единичный пакет), то он считается ложным и исключается из дальнейшей обработки.
Изобретение иллюстрируются следующими чертежами.
Фиг.1 - радиолокационная станция наиболее близкая к заявляемой. Фиг.2 - примеры угловых пакетов пеленгов. Положения луча при обзоре пространства, в которых получены пеленги ПАП, показаны серым цветом, в положениях луча, обозначенных белым цветом, пеленгов ПАП нет. Показаны три вида угловых пакетов пеленгов: из одного положения луча (единичный пакет, Кпел=1) и из двух положений луча (Кпел=2) и из четырех положений луча (Кпел=4).
Фиг.3 - радиолокационная станция, реализующая заявляемый способ.
Заявляемый способ реализуется с помощью радиолокационной станции, которая содержит (фиг.3) антенну 1, приемник 2, пороговое устройство 3, синхронизатор 4 и блок оценки угловых координат 5, при этом выход антенны 1 соединен со входом приемника 2, выход которого соединен со входом порогового устройства 3, выход порогового устройства 3 и координатный выход антенны 1 соединены соответственно с первым и вторым входами блока оценки угловых координат 5, при этом блок оценки угловых координат 5 включает запоминающее устройство 6, блок формирования угловых пакетов 7, вычислитель 8 и блок анализа угловых пакетов пеленгов 9, причем первый и второй входы запоминающего устройства 6 являются первым и вторым входами блока оценки угловых координат 5 соответственно, выход синхронизатора 4 соединен с синхровходом запоминающего устройства 6, М выходов запоминающего устройства 6 соединены с М входами блока формирования угловых пакетов 7, М входов блока анализа угловых пакетов пеленгов 9 соединены с М выходами блока формирования угловых пакетов 7, а М его выходов соединены с М входами вычислителя 8, выход вычислителя 8 является выходом блока оценки угловых координат 5, который является выходом РЛС.
Количество выходов запоминающего устройства 6, входов и выходов блока формирования угловых пакетов 7, входов вычислителя 8, входов и выходов блока анализа угловых пакетов пеленгов 9, т.е. значение М, определяется наибольшей возможной величиной углового пакета пеленгов Кпел. Наибольшая возможная величина Кпел для конкретных параметров РЛС (шага перемещения луча при обзоре зоны, уровня боковых лепестков относительно главного лепестка ДНА) и мощности АП может быть определена заранее. Так, например, известно, что для шага перемещения луча антенны, равного ширине луча антенны по уровню половинной мощности, угловой пакет пеленгов состоит не более чем из 5 направлений луча, т.е. наибольшая возможная величина Кпел равна 5. Равна 5 и величина М.
Радиолокационная станция, реализующая заявляемый способ, может быть выполнена с использованием следующих функциональных элементов.
Антенна 1 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М.: Сов. радио, 1977, с.132-138).
Приемник 2 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Синхронизатор 4 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова. - М.: Сов. радио, 1970, с.602-603).
Цифровые элементы: пороговое устройство 3, запоминающее устройство 6, блок формирования угловых пакетов 7, вычислитель 8, блок анализа угловых пакетов пеленгов 9 - выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В.Тарабрина. - М.: Радио и связь, 1984).
Блок формирования угловых пакетов 7 построен на основе известной структурной схемы (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Советское радио, 1974, стр.38-40, рис.1.11).
Вычислитель 8 - вычислитель, реализующий операцию вычисления угловых координат ПАП, размеры угловых пакетов пеленгов которых превышают единицу, в соответствии с патентом РФ №2291466.
Блок анализа угловых пакетов пеленгов 9 - вычислитель, реализует функцию сравнения размеров сформированных в блоке 7 угловых пакетов пеленгов Кпел ПАП с единицей. На выход блока выдаются угловые пакеты пеленгов ПАП, размеры которых превышают единицу.
Радиолокационная станция, реализующая заявляемый способ, работает следующим образом.
Излучение постановщиков АП принимаются антенной 1, поступают в приемник 2 и далее на вход порогового устройства 3, где сравниваются с порогом обнаружения, который задается исходя из допустимой вероятности ложных тревог. Активные помехи, превысившие уровень порога, и сигналы, пропорциональные соответствующим угловым координатам луча антенны 1, поступают в блок оценки угловых координат 5. Амплитуды и угловые координаты положений луча, в которых произошло обнаружение АП (пеленги ПАП) по мере движения луча антенны при обзоре пространства, записываются в запоминающее устройство 6 и хранятся там. По окончании каждого периода обзора по командам синхронизатора 4 из запоминающего устройства 6 извлекаются записанные в них данные и подаются в блок формирования угловых пакетов 7, где происходит объединение пеленгов в угловые пакеты исходя из условия отсутствия пропусков пеленгов АП одновременно по обеим угловым координатам (фиг.2). Угловые координаты пеленгов, объединенных в пакеты, поступают на М входов блока анализа угловых пакетов пеленгов 9, где анализируются размеры пакетов. При этом угловые пакеты пеленгов, размеры которых превышают единицу, принимаются за истинные и передаются в вычислитель 8, где вычисляются угловые координаты ПАП. Угловые пакеты пеленгов, размер которых равен единице, принимаются за ложные пеленги и исключаются из дальнейшей обработки.
Таким образом, обеспечивается достижение заявляемого технического результата - уменьшение количества ложных пеленгов постановщиков активных помех при обеспечении высокой вероятности обнаружения их истинных пеленгов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕЛЕНГАЦИИ ПОСТАНОВЩИКА АКТИВНЫХ ПОМЕХ | 2015 |
|
RU2601876C1 |
| СПОСОБ ЗАЩИТЫ ОТ ПАССИВНЫХ ПОМЕХ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358285C1 |
| СПОСОБ УСТРАНЕНИЯ ЛОЖНЫХ ПЕЛЕНГОВ В ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПРИ ЕДИНИЧНОМ ОБЗОРЕ ВРАЩАЮЩЕЙСЯ АНТЕННО-ФИДЕРНОЙ СИСТЕМЫ | 2023 |
|
RU2817291C1 |
| Способ высокоточной пеленгации постановщика многократной ответно-импульсной помехи | 2020 |
|
RU2740296C1 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1985 |
|
SU1840389A1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2170940C2 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1982 |
|
SU1840048A2 |
| Способ пеленгации постановщика ответной помехи и радиолокационное устройство для его осуществления | 2016 |
|
RU2638317C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309427C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2235342C2 |
Изобретения относятся к области радиолокации и могут использоваться в радиолокационных станциях для пеленгации постановщиков активных помех (ПАП) в процессе обзора пространства. Достигаемым техническим результатом является уменьшение количества ложных пеленгов постановщиков активных помех при обеспечении высокой вероятности обнаружения истинных пеленгов. Технический результат достигается за счет того, что угловые положения луча, в которых произошло обнаружение активных помех, запоминают и формируют по ним угловые пакеты пеленгов ПАП, после чего по угловым пакетам пеленгов, размер которых превышает единицу, вычисляют угловые координаты ПАП, а пеленги, принятые только в одном направлении луча, исключают из дальнейшей обработки как ложные пеленги. 2 н.п. ф-лы, 3 ил.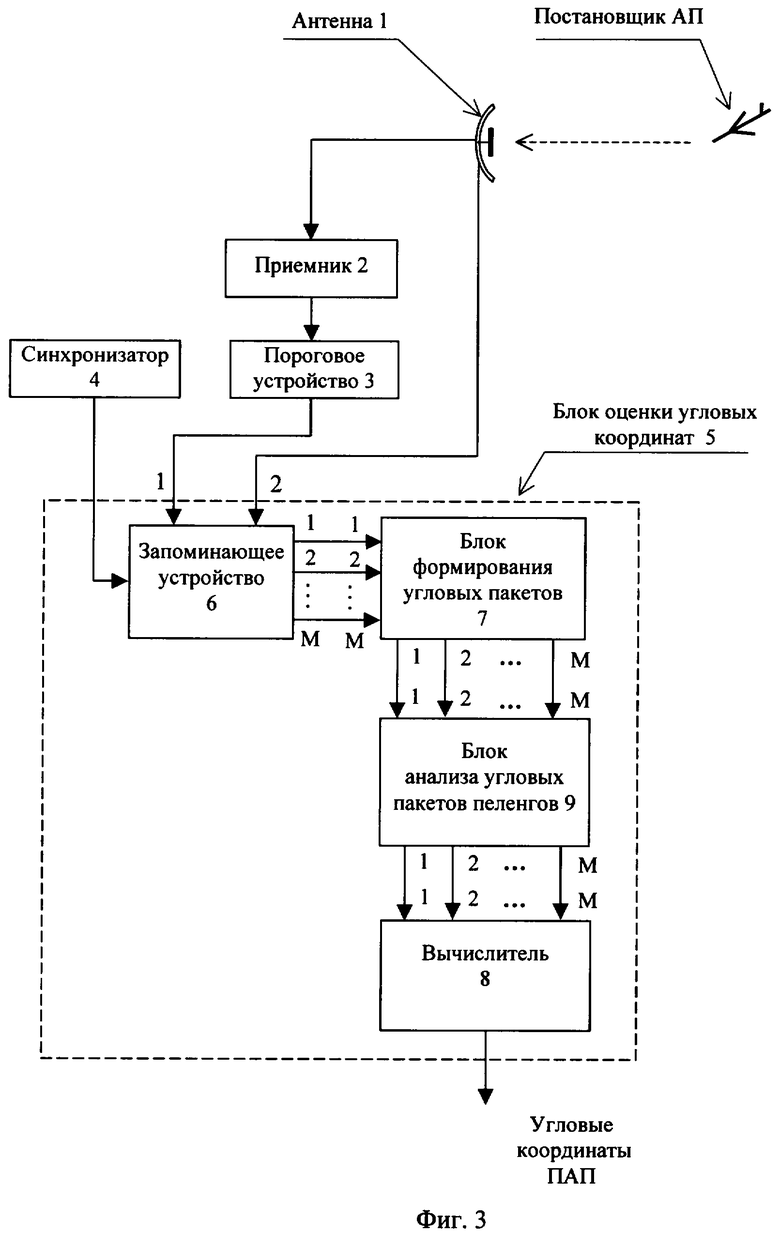
1. Способ одноканальной пеленгации постановщиков активных помех (ПАП) в процессе обзора пространства с помощью радиолокационной станции (РЛС), включающий пеленгацию ПАП в каждом положении луча антенны РЛС и измерение соответствующих уровней активных помех (АП), отличающийся тем, что угловые положения луча, в которых произошла пеленгация ПАП, и соответствующие уровни АП запоминают и формируют по ним угловые пакеты пеленгов ПАП, после чего по угловым пакетам пеленгов ПАП, размер которых превышает единицу, вычисляют угловые координаты ПАП, а угловые пакеты пеленгов ПАП, размер которых равен единице, принимают за угловые пакеты ложных пеленгов.
2. Радиолокационная станция, содержащая антенну, приемник, пороговое устройство, синхронизатор и блок оценки угловых координат, при этом выход антенны соединен с входом приемника, выход которого соединен с входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами блока оценки угловых координат, при этом блок оценки угловых координат включает запоминающее устройство, блок формирования угловых пакетов и вычислитель, причем первый и второй входы запоминающего устройства являются первым и вторым входами блока оценки угловых координат соответственно, выход синхронизатора соединен с синхровходом запоминающего устройства, М выходов запоминающего устройства, при этом величина М определяется наибольшей возможной величиной углового пакета пеленгов, соединены с М входами блока формирования угловых пакетов, выход вычислителя является выходом блока оценки угловых координат, который является выходом РЛС, отличающаяся тем, что в блок оценки угловых координат введен блок анализа угловых пакетов пеленгов, предназначенный для сравнения размеров сформированных угловых пакетов пеленгов с единицей и выдачи угловых пакетов пеленгов постановщика активных помех, размеры которых превышают единицу, при этом М входов блока анализа угловых пакетов пеленгов соединены с М выходами блока формирования угловых пакетов, а М его выходов соединены с М входами вычислителя, который предназначен для вычисления угловых координат постановщика активных помех, размеры угловых пакетов пеленгов которых превышают единицу.
| Теоретические основы радиолокации | |||
| Под ред | |||
| ДУЛЕВИЧА В.Е | |||
| - М.: Советское радио, 1978, с.260-262 | |||
| СПОСОБ ОЦЕНКИ ХАРАКТЕРИСТИК РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПРИ ДЕЙСТВИИ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2000 |
|
RU2193782C2 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ДЛЯ ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1977 |
|
RU2074403C1 |
| СПОСОБ ОСАЖДЕНИЯ БЛЕСТЯЩЕГО НИКЕЛЯ ЭЛЕКТРОЛИТИЧЕСКИМ ПУТЕМ | 1940 |
|
SU60373A1 |
| US 6392594 B1, 21.05.2002 | |||
| US 6839017 B1, 05.04.2005. | |||

