Предлагаемое изобретение относится к радиолокации, предназначено для определения угловых координат постановщиков шумовых активных помех (ПШАП) и оценки частотного распределения мощности шумовых активных помех (ШАП) в диапазоне рабочих частот РЛС, на основе которого производится выбор оптимальной частоты пеленгации и оптимальной частоты локации РЛС.
Известны различные многоканальные и одноканальные устройства [1-4], применяемые для определения угловых координат ПШАП.
Многоканальные амплитудные пеленгаторы [1, 2], обеспечивающие однозначность пеленга и минимальный заданный уровень ложных тревог, содержат несколько приемных каналов, один из которых, с остронаправленной диаграммой направленности (ДН) антенны, является основным, а остальные, со слабонаправленными ДН антенн, - дополнительными. К недостаткам многоканальных пеленгаторов следует отнести большой объем аппаратуры и сложность их построения.
Одноканальный амплитудный пеленгатор [3] содержит приемное устройство, пороговое устройство и устройство управления пороговым уровнем, в состав которого входит накопитель и интегратор, с помощью которых образуется пороговое напряжение, не допускающее приема сигналов по боковым лепесткам ДН антенны.
Пороговый уровень в данном пеленгаторе формируется по пиковому напряжению, огибающему принятые сигналы, для чего в цепи управления пороговым уровнем используется накопитель. С пороговым уровнем производится сравнение сигналов, принятых через обзор.
Недостатком данного аналога является большой уровень ложных пеленгов.
Существуют и другие варианты построения одноканального амплитудного пеленгатора ПШАП, где пороговый уровень формируется усреднением амплитуды принятых в некотором угловом интервале помех.
Наиболее близким техническим решением, принятым за прототип, является амплитудный пеленгатор постановщиков активных помех [4], содержащий последовательно соединенные антенну, приемник, детектор, интегратор, блок памяти амплитуд сигналов, блок сравнения, счетно-решающий блок для определения угловых координат ПШАП, а также блок формирования порогового уровня, вход которого подсоединен к выходу интегратора, а выход - ко второму входу блока сравнения [4].
В данном пеленгаторе с пороговым уровнем сравнивается амплитуда помехи, принятая в том же угловом интервале, что полностью исключает влияние изменения уровня сигналов в соседних обзорах на вероятность ошибки пеленга.
Недостатком [4] является то, что работа пеленгатора ПШАП ведется на одной рабочей частоте, которая, в общем случае, не совпадает с частотой максимального уровня мощности помехи, что приводит к уменьшению отношения помеха/шум на входе пеленгатора и, соответственно, к снижению потенциальной точности измерения угловых координат ПШАП. Современные РЛС используют не менее 12 рабочих частот зондирования. Смена частот зондирования производится с учетом помеховой обстановки. Включается частота, где уровень помех наименьший.
Техническим результатом предлагаемого изобретения является увеличение точности измерения угловых координат ПШАП за счет параллельной работы одноканального пеленгатора на всех приемных частотах РЛС, а также увеличение разрешающей способности пеленгатора по узкополосным ПШАП, расположенных на близких азимутах. При этом решается дополнительная задача - адаптивная перестройка передающих частот РЛС (локации на частоте с минимумом шумовой помехи).
Это достигается тем, что в амплитудный пеленгатор постановщиков активных помех, взятый за прототип и содержащий антенну, приемное устройство и детектор, соединенные последовательно, первый канал обработки, состоящий из интегратора, блока памяти амплитуд сигналов, блока сравнения, соединенных последовательно, и блока формирования порогового уровня, вход которого подсоединен к выходу интегратора, а выход - ко второму входу блока сравнения, а также содержащий счетно-решающий блок для определения угловых координат ПШАП, введены последовательно соединенные блок управления переключением приемных частот и блок формирования частот, выход которого соединен со вторым входом приемного устройства, коммутатор, блок определения максимума сигналов, К-1 каналов обработки, аналогичных первому, блок оценки спектра и блок управления переключением передающей частоты, причем первый вход коммутатора соединен с выходом детектора, второй, управляющий вход соединен с выходом блока управления переключением приемных частот, а К выходов коммутатора подключены соответственно к входам К интеграторов, К входов блока определения максимума сигналов соединены соответственно с выходами К блоков сравнения, а его выход соединен со входом счетно-решающего блока, выходы К интеграторов подключены также к К входам блока оценки спектра, управляющий вход К+1 которого соединен с выходом блока управления переключением приемных частот, а выход - со входом блока управления переключением передающей частоты.
На фиг.1 представлена структурная схема амплитудного пеленгатора поставщиков активных шумовых помех - прототипа.
На фиг.2 - структурная схема предлагаемого амплитудного одноканального многочастотного пеленгатора активных шумовых помех.
На фиг.1 и 2 приняты следующие обозначения:
1 - антенна;
2 - приемное устройство;
3 - детектор
4 - интегратор;
5 - блок памяти амплитуд сигналов;
6 - блок формирования порогового уровня;
7 - блок сравнения;
8 - счетно-решающий блок для определения угловых координат ПШАП;
9 - блок формирования частот;
10 - блок управления переключением приемных частот;
11 - коммутатор;
12 - блок определения максимума сигналов;
13 - блок оценки спектра;
14 - блок управления переключением передающей частоты.
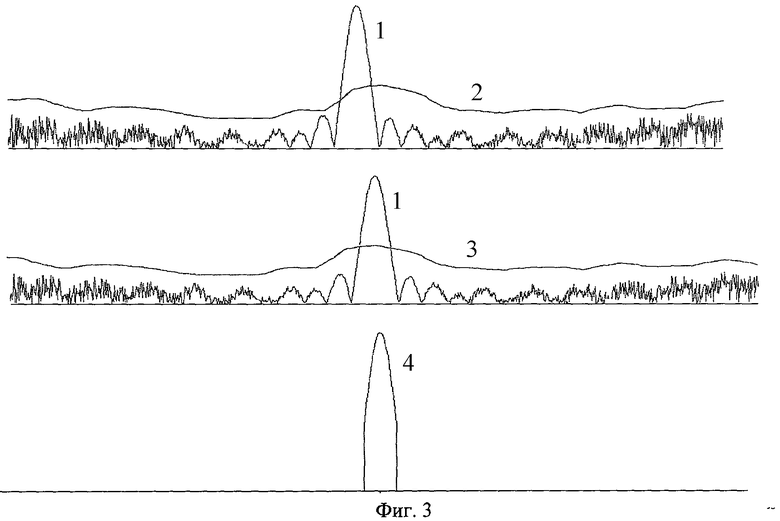
На фиг.3 представлены виды сигналов на выходе: интегратора (кривая 1), блока формирования порогового уровня (кривая 2), блока памяти амплитуд сигналов (кривая 3) и блока сравнения (кривая 4).
Амплитудный одноканальный многочастотный пеленгатор шумовых активных помех содержит последовательно соединенные антенну 1, приемное устройство 2 и детектор 3, последовательно соединенные блок управления переключением приемных частот 10 и блок формирования частот 9, выход которого соединен со вторым входом приемного устройства 2, К каналов обработки, каждый из которых состоит из последовательно соединенных интегратора 4, блока памяти амплитуд сигналов 5 и блока сравнения 7, а также блока формирования порогового уровня 6, вход которого подсоединен к выходу интегратора 4, а выход - ко второму входу блока сравнения 7, коммутатор 11, блок определения максимума сигналов 12, счетно-решающий блок для определения угловых координат ПШАП 8, блок оценки спектра 13 и блок управления переключением передающей частоты 14, причем первый вход коммутатора 11 соединен с выходом детектора 3, второй, управляющий вход соединен с выходом блока управления переключением приемных частот 10, а К выходов коммутатора 11 подключены соответственно ко входам К интеграторов 4, К входов блока определения максимума сигналов 12 соединены соответственно с выходами К блоков сравнения 7, а выход блока определения максимума сигналов 12 соединен со входом счетно-решающего блока 8, выходы К интеграторов 4 подключены к К входам блока оценки спектра 13, управляющий вход К+1 которого соединен с выходом блока управления переключением приемных частот 10, а выход - со входом блока управления переключением передающей частоты 14.
Заявляемое устройство работает следующим образом.
С антенны 1 сигнал поступает на приемное устройство 2, настроенное на частоту, задаваемую блоком формирования частот 9. При помощи блока формирования частот 9 и блока управления переключением приемных частот 10 происходит периодическая (потактовая) перестройка частоты приемного устройства 2 по диапазону рабочих частот амплитудного пеленгатора ПШАП. Рабочие частоты располагаются по диапазону равномерно. С приемного устройства 2 сигнал поступает на детектор 3, и полученные с него значения амплитуд через коммутатор 11 поступают на интеграторы 4. Коммутатор 11 управляется с блока управления переключением приемных частот 10 следующим образом. При потактовой смене рабочих частот приемного устройства 2 сигналы, соответствующие первой (условно) рабочей частоте, поступают с детектора 3 через коммутатор 11 на интегратор 4 первого канала обработки, сигналы, соответствующие второй рабочей частоте, - на интегратор 4 второго канала обработки, сигналы, соответствующие К-й рабочей частоте, - на интегратор 4 К-го канала обработки. В интеграторах 4 производится потактовое накопление сигналов на интервале анализа каждой рабочей частоты. С выхода каждого (1, 2, ..., К) интегратора 4 сигналы поступают на соответствующий блок формирования порогового уровня 6, в котором за некоторое время Т (время Т много больше времени прохождения главным лепестком диаграммы направленности антенны (ДНА) направления на ПШАП) формируется пороговый уровень, равный среднему уровню помехи за период Т, увеличенному таким образом, чтобы не превышалась заданная вероятность ложного пеленга, обусловленная случайными выбросами диаграммы направленности (фиг.3 - кривая 2). Одновременно сигналы с выхода интегратора 4 поступают на соответствующие каждому каналу обработки блоки памяти амплитуд сигналов 5, в которых амплитуды сигналов запоминаются на время, равное половине интервала усреднения Т (т.е. на время Т/2). В блоке сравнения 7, соответствующем каждому каналу обработки, каждое из запомненных значений сравнивается с пороговым уровнем, и при превышении порога на выходе блока сравнения 7 формируется признак наличия пеленга (фиг.3 - кривая 4). С выходов блоков сравнения 7 признаки наличия пеленга поступают на блок определения максимума сигналов 12. В блоке 12 выделяется признак наличия пеленга с наибольшей амплитудой. Именно этот признак и поступает в счетно-решающее устройство 8 для определения пеленга на постановщик ШАП. Благодаря этому достигается увеличение точности измерения угловых координат ПШАП за счет настройки на частоту с максимальным отношением помеха/шум.
Сигналы с каждого из К интеграторов 4 также поступают соответственно на К входов блока оценки спектра 13. В блоке 13 производится сравнение накопленных амплитуд сигналов на каждой из К рабочих частот, т.е. оценивается спектр шумовой помехи в диапазоне рабочих частот РЛС. На основании этого анализа выделяется рабочая частота с минимальным уровнем шумовой помехи. Информация о рабочей точке с минимальным уровнем помехи с выхода блока 13 поступает на вход блока управления переключением передающей частоты 14. В заявляемом устройстве, таким образом, решается дополнительная задача адаптивной перестройки передающих частот РЛС, осуществляется радиолокация на частоте с минимумом активной шумовой помехи.
Таким образом, в амплитудном одноканальном многочастотном пеленгаторе шумовых активных помех при помощи блока формирования частот 9, блока управления переключением приемных частот 10, коммутатора 11, К каналов обработки, каждый из которых состоит из интегратора 4, блока памяти амплитуд сигналов 5, блока сравнения 7 и блока формирования порогового уровня 6, и блока определения максимума 12 производится выбор оптимальных частот пеленгации, что приводит к повышению точности измерения угловых координат постановщиков ШАП.
При помощи коммутатора 11, интеграторов 4, блока оценки спектра 13 и блока управления переключением передающей частоты 14 в амплитудном одноканальном многочастотном пеленгаторе шумовых активных помех осуществляется дополнительная функция - адаптивная перестройка передающих частот РЛС.
Эффективность заявляемого многочастотного пеленгатора ПШАП проверялась методом математического моделирования.
Выбор оптимальной частоты для пеленга ПШАП (ширина полосы помехи - порядка 20-50 МГц) позволяет получить выигрыш в отношении помеха/шум порядка 1-20 дБ (в зависимости от взаимного расположения частотной полосы ШАП и рабочего диапазона частот пеленгатора).
Анализ точностных характеристик измерения азимута ПШАП показывает, что данное устройство позволяет увеличить разрешающие способности по узкополосным ПШАП, расположенных на близких азимутах, обеспечивает измерение азимута менее 0,1 ширины главного лепестка ДНА.
Эффективность адаптивной перестройки передающей частоты РЛС зависит от времени анализа сигнала помехи - времени накопления сигналов в интеграторе 4. При времени накопления, большем 100 интервалов корреляции помехи, точность определения минимума помехи составляет не более 1 дБ.
Источники информации
1. Патент США №3747100, МПК G01S 3/06, опубл. 1973 г., "Устройство определения главного лепестка диаграммы направленности".
2. Патент Великобритании №1236501, МПК G01S 3/06, опубл. 1971 г., "Радиопеленгатор".
3. Ширман Я.Д. Теоретические основы радиолокации. М.: Советское радио, 1970 г.
4. Патент РФ №2074403, МПК G01S 3/06, опубл. 1997 г., "Амплитудный пеленгатор постановщиков активных помех", ННИИРТ.
| название | год | авторы | номер документа |
|---|---|---|---|
| АМПЛИТУДНЫЙ ОДНОКАНАЛЬНЫЙ МНОГОЧАСТОТНЫЙ ПЕЛЕНГАТОР ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2005 |
|
RU2305850C2 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1984 |
|
SU1840388A2 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1982 |
|
SU1840048A2 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1985 |
|
SU1840389A1 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1987 |
|
RU2226700C2 |
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА ВОЛН | 2003 |
|
RU2256190C2 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ПРОТИВОДЕЙСТВИЯ | 2002 |
|
RU2237907C2 |
| Способ пеленгации постановщика ответной помехи и радиолокационное устройство для его осуществления | 2016 |
|
RU2638317C2 |
| СПОСОБ ОДНОКАНАЛЬНОЙ ПЕЛЕНГАЦИИ ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2352956C1 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ДЛЯ ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1977 |
|
RU2074403C1 |

Предлагаемое изобретение относится к радиолокации, предназначено для определения угловых координат постановщиков шумовых активных помех (ПШАП) и оценки частотного распределения мощности шумовых активных помех (ШАП) в диапазоне рабочих частот РЛС, на основе которого производится выбор оптимальной частоты пеленгации и оптимальной частоты локации РЛС. Достигаемым техническим результатом изобретения является увеличение точности измерения угловых координат ПШАП за счет параллельной работы одноканального пеленгатора на всех приемных частотах РЛС, а также увеличение разрешающей способности узкополосных ПШАП, расположенных на близких азимутах. При этом решается дополнительная задача - адаптивная перестройка передающих частот РЛС (локации на частоте с минимумом шумовой помехи). 3 ил.
Амплитудный одноканальный многочастотный пеленгатор шумовых активных помех, содержащий антенну, приемное устройство и детектор, соединенные последовательно, первый канал обработки, состоящий из интегратора, блока памяти амплитуд сигналов, блока сравнения, соединенных последовательно, и блока формирования порогового уровня, вход которого подсоединен к выходу интегратора, а выход - ко второму входу блока сравнения, а также содержащий счетно-решающий блок для определения угловых координат поставщиков шумовых активных помех, отличающийся тем, что в него введены последовательно соединенные блок управления переключением приемных частот и блок формирования частот, выход которого соединен со вторым входом приемного устройства, коммутатор, блок определения максимума сигналов, К-1 каналов обработки, аналогичных первому, блок оценки спектра и блок управления переключением передающей частоты, причем первый вход коммутатора соединен с выходом детектора, второй, управляющий вход соединен с выходом блока управления переключением приемных частот, а К выходов коммутатора подключены соответственно ко входам К интеграторов, К входов блока определения максимума сигналов соединены соответственно с выходами К блоков сравнения, а его выход соединен со входом счетно-решающего блока для определения угловых координат поставщиков шумовых активных помех, выходы К интеграторов подключены также к К входам блока оценки спектра, управляющий вход К+1 которого соединен с выходом блока управления переключением приемных частот, а выход - со входом блока управления переключением передающей частоты.
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ДЛЯ ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1977 |
|
RU2074403C1 |
| УСТРОЙСТВО ПЕЛЕНГАЦИИ ИСТОЧНИКОВ АКТИВНОЙ ШУМОВОЙ ПОМЕХИ | 1992 |
|
RU2072527C1 |
| АМПЛИТУДНЫЙ ПЕЛЕНГАТОР ПОСТАНОВЩИКОВ АКТИВНЫХ ПОМЕХ | 1987 |
|
RU2226700C2 |
| СПОСОБ ПЕЛЕНГАЦИИ МНОЖЕСТВА ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ, ОДНОВРЕМЕННО ПОПАДАЮЩИХ В ПОЛОСУ ПРИЕМА | 2001 |
|
RU2207583C1 |
| US 6839017 B1, 04.01.2005 | |||
| ВЫЧИСЛЕНИЕ ПОТРЕБЛЕНИЯ ТОПЛИВА ДЛЯ СМЕСИ ТОПЛИВА И ВОДЫ | 2017 |
|
RU2712989C1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ БЕЛКОВО-УГЛЕВОДНОГО ПРОДУКТА | 2006 |
|
RU2314716C1 |

