Изобретение относится к области ракетной техники.
Известен способ установки угла наклона лопастей стабилизатора, описанный в изобретении под названием "Ракета" (патент 2103651 от 27.01.98 г.), в котором на цилиндрический разъемный корпус стабилизирующего устройства с наклонными приливами и резьбовыми отверстиями и проушинами устанавливают четыре пружинные лопасти основаниями в проушины, шарнирно закрепляя соединительными эксцентриковыми пальцами. Изнутри под окнами стабилизирующего устройства устанавливают на винтах стопорящие пластинчатые пружины до упора в зуб основания кулачка лопасти. Поворачивая палец за головку, выставляют каждую лопасть под рабочим углом к продольной оси ракеты. В резьбовые отверстия наклонных приливов устанавливают регулировочные винты, вращая их, выставляют опорную поверхность каждой лопасти. Проведя нивелировку лопастей, соединительные эксцентриковые пальцы стопорят накидным замком, установленным на каждую головку пальца, в паз проушины, который закернивают в нескольких местах.
Однако данный способ предполагает установку лопастей стабилизатора под рабочим углом либо по специально изготовленному шаблону, что не сможет обеспечить точность установки лопастей при малых рабочих углах в минутах, либо по перепаду двух реперных точек, что намного точнее, хотя и при этом способе не обеспечивается точность установки лопастей под рабочими углами, в силу того что лопасти стабилизатора имеют сложный профиль, определяемый технологией изготовления, что не позволяет адекватно оценить угол установки по двум реперным точкам. А учитывая, что рабочие углы установки лопастей малы и определяются в минутах, может получиться так, что при установка лопастей среднее квадратичное отклонение углов установки лопастей от эквивалентного соизмеримо с величиной самого угла, что недопустимо.
Поэтому задачей предлагаемого изобретения является устранение указанных выше недостатков, а именно обеспечение точности и надежности установки рабочего угла наклона лопастей стабилизатора в заданном пределе допусков за счет использования n-количества реперных точек.
Указанная задача достигается тем, что в способе установки рабочего угла наклона лопастей стабилизатора, включающем сборку стабилизатора, регулировку каждой лопасти стабилизатора под заданным рабочим углом к продольной оси вращением эксцентрикового пальца с нивелировкой опорной поверхности каждой лопасти регулировочными винтами, установку заданного рабочего угла наклона лопасти осуществляют по перепаду реперных точек, попарно лежащих в n-количестве i-сечений, параллельных продольной оси лопасти стабилизатора, причем сечения и расстояния между реперными точками в сечении выбирают в зависимости от формы и направления вращения лопасти стабилизатора с максимальным удалением друг от друга, при этом сначала устанавливают заданный рабочий угол наклона лопасти по перепаду базовых реперных точек, лежащих в центре давления аэродинамических сил, действующих на лопасть, в сечении, делящем лопасть пополам, затем замеряют перепады реперных точек каждого из i-сечений, расположенных по обе стороны от центра давления аэродинамических сил, и вычисляют значение расчетного рабочего угла наклона лопасти δ с весами, пропорциональными вкладу каждого i-сечения лопасти в крутящий момент по формуле
где  - сумма перепадов реперных точек i-сечений;
- сумма перепадов реперных точек i-сечений;
m - производная по углу наклона коэффициента момента крена i-сечения;
- производная по углу наклона коэффициента момента крена i-сечения;
δi - угол наклона i -сечения;
n - количество i-сечений, если расчетный рабочий угол наклона лопасти не соответствует заданному, то, вращая соединительный эксцентриковый палец, добиваются изменения перепада базовых реперных точек на величину несоответствия.
Сущность изобретенного способа заключается в том, что обеспечивается точность установки рабочего угла наклона лопастей стабилизатора в заданных допусках с учетом возможной неплоскостности самой лопасти.
Существо изобретения подтверждается чертежами фиг.1,2 и описанием способа, где:
1 - стабилизатор
2 - лопасть
3 - основание лопасти
4 - пластина лопасти
5 - соединительные эксцентриковые пальцы
6 - винт регулировочный
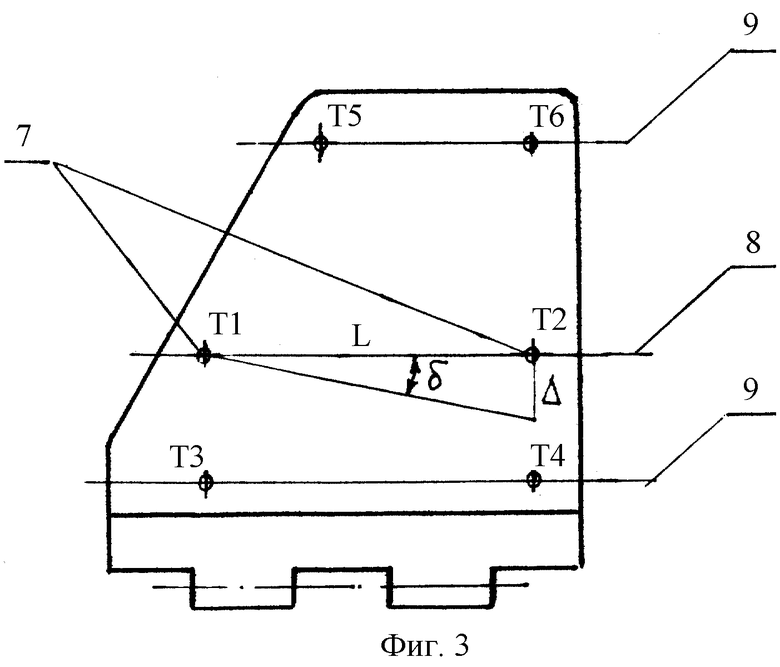
7 - базовые реперные точки Т1 и Т2
8 - i-сечение, лежащее в центре давления аэродинамических сил
Δ - перепад реперных точек, равный (Т2-Т1)
9 - n-количество i-сечений
10 - накидной замок
Рассмотрим стабилизатор 1, каждая лопасть 2 которого выполнена в виде основания 3 и пластины 4. Неплоскостность лопасти может возникнуть из-за поворота пластины относительно основания лопасти и искривлении пластины 4 под действием ее деформации при закреплении (приклепывании) к основанию лопасти 3. Обычный способ подразумевает установку рабочих углов наклона лопасти стабилизатора по перепаду только двух базовых реперных точек 5, лежащих в одном сечении 8 на расстоянии L, и определяется через  и обозначается
и обозначается  что составляет угол наклона δ лопасти в сечении 8, которое выбирается либо в соответствии с расположением центра давления аэродинамических сил, действующих на лопасть, либо из геометрических соображений и обычно расположено на половине размаха лопасти. Базовые реперные точки Т1 и Т2 выбираются из соображений обеспечения максимальной базы, но с учетом минимального влияния профиля самого сечения (закругленная или заостренная кромка).
что составляет угол наклона δ лопасти в сечении 8, которое выбирается либо в соответствии с расположением центра давления аэродинамических сил, действующих на лопасть, либо из геометрических соображений и обычно расположено на половине размаха лопасти. Базовые реперные точки Т1 и Т2 выбираются из соображений обеспечения максимальной базы, но с учетом минимального влияния профиля самого сечения (закругленная или заостренная кромка).
Лопасть стабилизатора устанавливается под заданным рабочим углом δ для создания момента по крену Mх. Создаваемый момент пропорционален углу наклона δ и равен Mx = m
Если лопасть такова, что ее погрешность изготовления сопоставима о углом δ, что недопустимо, то необходимо учесть погрешности следующим образом: разбить лопасть на n-количество i-сечений 9, параллельных продольной оси стабилизатора, для каждого из которых определяется местный фактический угол наклона δi(i=1), получаемый от фактических перепадов точек (Т6-Т5) и (Т4-Т3) i-сечений, тогда создаваемый суммарный момент по крену будет составлять  где
где  - производная по углу наклона коэффициента момента крена i-того сечения.
- производная по углу наклона коэффициента момента крена i-того сечения.
Количество сечений определяется по конструктивным соображениям и по результатам сопоставления натурных испытаний и расчета угловой скорости вращения ракеты.
Если потребовать, чтобы создаваемый момент "не плоской" лопасти был эквивалентен требуемому моменту "плоской лопасти", получится равенство
Для определения весовых коэффициентов производится аэродинамический расчет по определению коэффициента момента крена каждого сечения лопасти  сумма этих коэффициентов составляет коэффициент момента крена всей лопасти m
сумма этих коэффициентов составляет коэффициент момента крена всей лопасти m
Для получения угла δ установки наклона лопасти в минутах необходимо полученные величины умножить на  окончательная формула при заданных L1; L2; Ln будет
окончательная формула при заданных L1; L2; Ln будет
Если расчетный рабочий угол наклона δ не соответствует заданному, то необходимо, вращая соединительный эксцентриковый палец 5, добиться изменения перепада базовых реперных точек Т1 и Т2 на величину несоответствия. Таким образом, выставляют каждую лопасть стабилизатора 1, затем производят нивелировку опорной поверхности каждой лопасти регулировочными винтами 6 и стопорят накидным замком 10.
Источники информации
1. Патент России 2103651 от 27.01.98г., MПK 7 F 42 B 10/14 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСТАНОВКИ ЛОПАСТЕЙ ОПЕРЕНИЯ СТАБИЛИЗИРУЮЩЕГО УСТРОЙСТВА РАКЕТЫ | 2009 |
|
RU2403530C1 |
| ВРАЩАЮЩИЙСЯ ПО КРЕНУ СНАРЯД | 1999 |
|
RU2152585C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 1998 |
|
RU2148780C1 |
| СКЛАДНОЙ АЭРОДИНАМИЧЕСКИЙ ОРГАН | 2001 |
|
RU2197704C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2001 |
|
RU2199715C2 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| РАКЕТА | 1995 |
|
RU2103651C1 |
| СТАБИЛИЗИРУЮЩЕЕ УСТРОЙСТВО | 1999 |
|
RU2153146C1 |
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2000 |
|
RU2177601C1 |

Изобретение относится к области ракетной техники. Установку рабочего угла наклона лопастей стабилизатора, состоящего из сборки стабилизатора, и регулировку каждой лопасти под рабочим углом к продольной оси осуществляют вращением эксцентрикового пальца с нивелировкой опорной поверхности каждой лопасти регулировочными винтами. При этом установку заданного угла наклона лопастей осуществляют по перепаду реперных точек, попарно лежащих в n-количестве i-сечений, параллельных продольной лопасти стабилизатора, причем сечения и расстояние между реперными точками в сечении выбирают в зависимости от формы направления вращения лопастей стабилизатора с максимальным удалением друг от друга. Сначала устанавливают заданный рабочий угол наклона лопастей по перепаду базовых реперных точек, лежащих в центре давления аэродинамических сил, действующих на лопасть, в сечении, делящем лопасть пополам, затем замеряют перепады реперных точек каждого из i-сечений, расположенных по обе стороны от центра давления аэродинамических сил, и вычисляют значение расчетного рабочего угла наклона лопасти. Изобретение позволяет производить точную и надежную установку лопастей стабилизатора в заданном пределе допусков. 3 ил.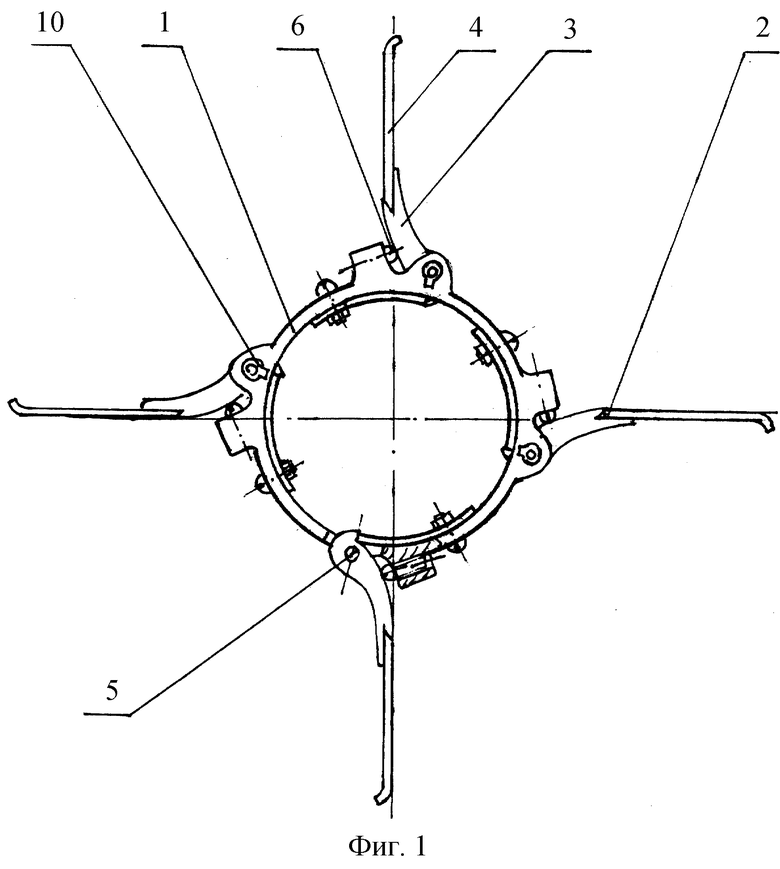
Способ установки рабочего угла наклона лопастей стабилизатора, включающий сборку стабилизатора, регулировку каждой лопасти стабилизатора под заданным рабочим углом к продольной оси вращением эксцентрикового пальца с нивелировкой опорной поверхности каждой лопасти регулировочными винтами, отличающийся тем, что установку заданного рабочего угла наклона каждой лопасти осуществляют по перепаду реперных точек, попарно лежащих в n-количестве i-сечений, параллельных продольной оси лопасти стабилизатора, причем сечения и расстояния между реперными точками в сечении выбирают в зависимости от формы и направления вращения лопасти стабилизатора с максимальным удалением друг от друга, при этом сначала устанавливают заданный рабочий угол наклона лопасти по перепаду базовых реперных точек, лежащих в центре давления аэродинамических сил, действующих на лопасть, в сечении, делящем лопасть пополам, затем замеряют перепады реперных точек каждого из i-сечений, расположенных по обе стороны от центра давления аэродинамических сил, и вычисляют значение расчетного рабочего угла наклона лопасти δ с весами, пропорциональными вкладу каждого i-сечения лопасти в крутящий момент по формуле
где  - сумма перепадов реперных точек, i-сечений;
- сумма перепадов реперных точек, i-сечений;
m - производная по углу наклона коэффициента момента крена i - сечения;
- производная по углу наклона коэффициента момента крена i - сечения;
δi - угол наклона i-сечения;
n - количество i-сечений, если расчетный рабочий угол наклона лопасти не соответствует заданному, то вращая соединительный эксцентриковый палец, добиваются изменения перепада базовых реперных точек на величину несоответствия.
| РАКЕТА | 1995 |
|
RU2103651C1 |
| РАСКРЫВАЮЩИЙСЯ АЭРОДИНАМИЧЕСКИЙ СТАБИЛИЗАТОР ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2089833C1 |
| RU 2071027 С1, 27.12.1996 | |||
| Формирующее устройство для вертикальной сварки | 1978 |
|
SU747659A1 |
| US 6073879 А, 13.06.2000. | |||

