Изобретение относится к области разработки систем управления ракетами с аэродинамическими рулями и может быть использовано в комплексах танкового и противотанкового вооружения, а также малогабаритных зенитных комплексах.
Известен способ управления ракетой [1], заключающийся в создании управляющего аэродинамического момента относительно центра масс ракеты под действием подъемной силы, возникающей на рулях при их отклонении на определенный угол в соответствии с командами управления.
Особенность такого способа управления состоит в том, что ракета должна обладать необходимым запасом статической устойчивости в диапазоне рабочих углов атаки. Это означает, что суммарный момент аэродинамических сил, возникающий при угловом отклонении ракеты от положения равновесия, должен быть направлен в сторону положения равновесия.
Это обеспечивается соответствующим выбором формы и размеров аэродинамических рулей и стабилизаторов, положением центра масс ракеты, расстоянием от центра масс ракеты до стабилизаторов и т.п. Следует отметить, что конструктивное выполнение указанных элементов при ограничениях на габариты и вес является сложной задачей, поскольку в комплексах танкового вооружения длина ракеты, как правило, ограничена заряжающим механизмом, а размеры стабилизаторов - необходимостью складывания.
Кроме того, ракета должна обладать необходимой маневренностью, оцениваемой величиной т. н. "перегрузок". Располагаемые ракетой "перегрузки", а следовательно и маневренность, будут тем больше, чем больше балансировочные углы атаки и скольжения, характеризующие положение продольной оси ракеты относительно направления вектора скорости. Однако балансировочные углы атаки и скольжения ограничены предельно допустимыми значениями по аэродинамической устойчивости в полете управляемой ракеты. Как следствие, ограниченными являются и развиваемые ракетой перегрузки.
Таким образом, увеличение перегрузок, например, с помощью увеличения площади аэродинамических рулей или расстояния от центра масс ракеты до рулей неизбежно ведет к потере управляемой ракетой устойчивости в полете. И наоборот, всякое увеличение запасов устойчивости ведет к уменьшению маневренности.
Наиболее близким по технической сущности к предлагаемому изобретению является способ управления ракетой с аэродинамическими рулями [2], заключающийся в формировании команд управления, подаче их на рулевой привод ракеты и отклонении аэродинамических рулей в соответствии с управляющими сигналами.
Известный способ обладает тем же основным недостатком, а именно, он применим только к статически устойчивым в полете ракетам. При этом всякое повышение запасов статической устойчивости приводит к снижению располагаемых и развиваемых перегрузок ракеты.
Задачей предлагаемого изобретения является управление малоустойчивыми и неустойчивыми в полете ракетами с аэродинамическими рулями, а также повышение маневренности ракет.
Поставленная задача достигается за счет того, что в способе управления ракетой, заключающемся в формировании команд управления, подаче их на рулевой привод ракеты и отклонении аэродинамических рулей в соответствии с управляющими сигналами, - команды управления формируются в виде трехпозиционного широтно-импульсного модулированного сигнала Uвх с одним нулевым и двумя равными по модулю и противоположными по знаку ненулевыми уровнями, а отклонение рулей производят в соответствии с зависимостью:
δ = δm• sign Uвх при ненулевых уровнях Uвх;
δ = -α при нулевом уровне Uвх,
где δm - максимальный угол отклонения рулей;
α - угол между продольной осью и вектором скорости ракеты;
δ - угол отклонения рулей относительно продольной оси ракеты.
Для достижения технического результата ракета должна обладать устойчивостью в полете без аэродинамических рулей при отклонении относительно центра масс на угол ± αmax, где αmax - величина, определяемая необходимой маневренностью ракеты. Исходя из этого, выбираются форма и размеры стабилизаторов, которые должны создавать стабилизирующий момент, достаточный для возвращения ракеты без рулей в положение равновесия ( α = 0) в указанном диапазоне углов атаки.
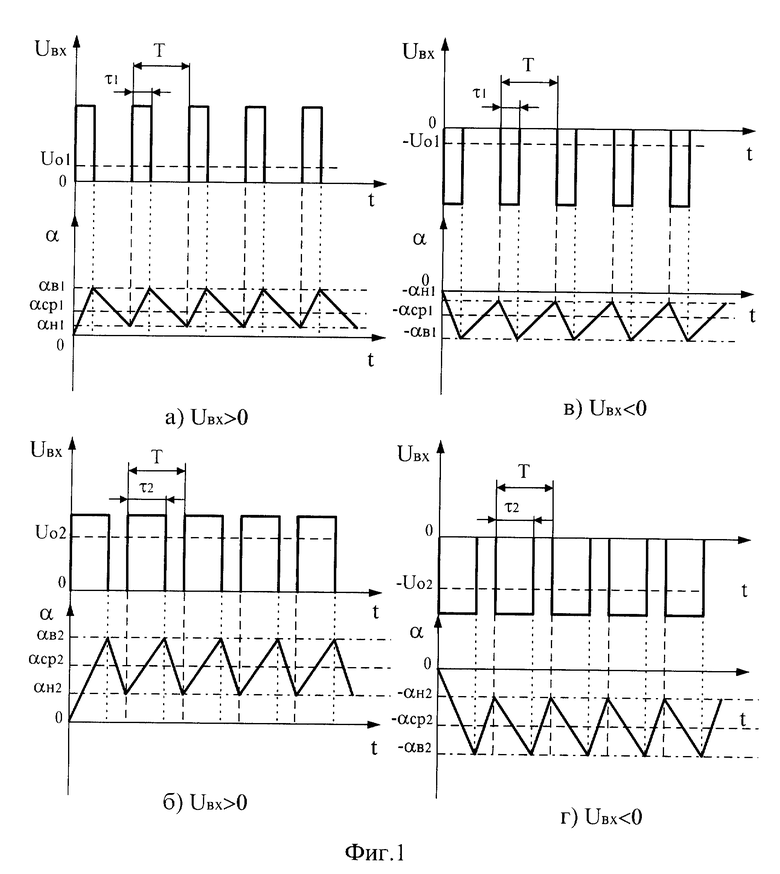
Такой летательный аппарат при установке на него аэродинамических рулей и их отклонении при подаче сигнала будет обладать малым запасом статической устойчивости или неустойчив вообще. Тем не менее предлагаемое изобретение позволяет управлять таким летательным аппаратом, для чего на вход рулевого привода подаются сигналы, представленные на фиг.1, а-г, где T - период следования импульсов, τ1,2 - длительность импульса; α - угол между продольной осью и вектором скорости ракеты; αср1,2 - среднее значение угла атаки; Uo1.2 - постоянная составляющая входного сигнала, причем индексы 1 и 2 приняты для разных длительностей импульсов команд.
На фиг. 1, а, б представлены форма входного сигнала и изменение угла α для Uвх > 0 и длительности входного сигнала τ1 и τ2 (τ2> τ1), a на фиг. 1, в, г - для Uвх < 0.
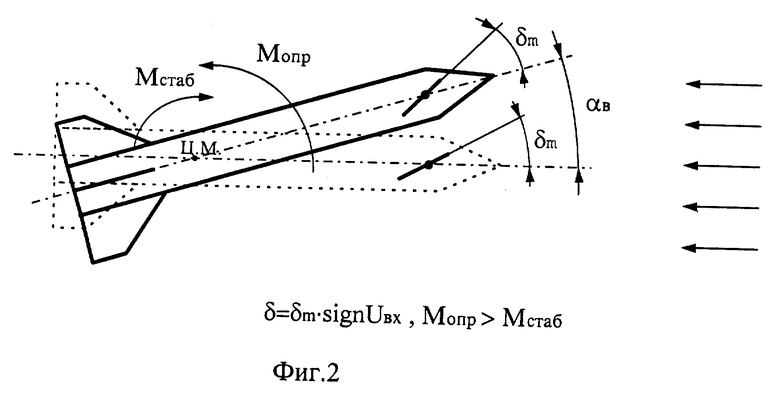
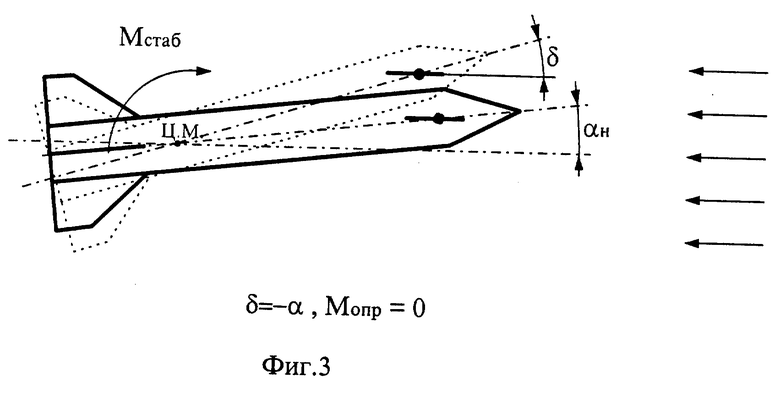
В момент подачи входного импульса, например Uвх > 0, (фиг. 1, а, б), рули отклоняются на максимальную величину δm (фиг.2) в соответствии со знаком сигнала управления (в данном случае положительном) и в течение интервала времени τ удерживаются в этом положении. Центр давления аэродинамических сил смещается относительно центра масс (ЦМ) ракеты вперед, и ракета, потеряв устойчивость, начинает поворачиваться вокруг ЦМ (фиг.2) до тех пор, пока сигнал управления не станет равным нулю. За этот интервал времени ракета отклоняется на угол  величина которого тем больше, чем больше длительность импульса τ. Начиная с момента времени (T-τ) на каждом интервале следования импульсов, рули устанавливают по набегающему воздушному потоку, реализуя δ = -α (фиг. З), что приводит к обнулению опрокидывающего момента Mопр. относительно ЦМ. В результате на ракету действует лишь стабилизирующий момент Mстаб., обусловленный стабилизаторами, под действием которого продольная ось ракеты начинает разворачиваться в направлении положения равновесия (фиг. 3) до момента подачи следующего импульса. К моменту подачи следующего импульса ракета имеет угол αн между продольной осью и вектором скорости, отличный от нуля. Величина среднего значения угла атаки αcp в установившемся процессе указанных циклических перемещений продольной оси ракеты пропорциональна величине скважности импульсов (фиг. 1, а-г). Таким образом, вместо непрерывного управления аэродинамически устойчивой ракетой (в прототипе) предлагается импульсное управление ракетой с характеристиками планера, изменяющимися синхронно с импульсами управления. Причем при действии импульса управления реализуются характеристики, соответствующие аэродинамически неустойчивой в полете ракете, а при отсутствии импульса - аэродинамически устойчивой в полете ракете.
величина которого тем больше, чем больше длительность импульса τ. Начиная с момента времени (T-τ) на каждом интервале следования импульсов, рули устанавливают по набегающему воздушному потоку, реализуя δ = -α (фиг. З), что приводит к обнулению опрокидывающего момента Mопр. относительно ЦМ. В результате на ракету действует лишь стабилизирующий момент Mстаб., обусловленный стабилизаторами, под действием которого продольная ось ракеты начинает разворачиваться в направлении положения равновесия (фиг. 3) до момента подачи следующего импульса. К моменту подачи следующего импульса ракета имеет угол αн между продольной осью и вектором скорости, отличный от нуля. Величина среднего значения угла атаки αcp в установившемся процессе указанных циклических перемещений продольной оси ракеты пропорциональна величине скважности импульсов (фиг. 1, а-г). Таким образом, вместо непрерывного управления аэродинамически устойчивой ракетой (в прототипе) предлагается импульсное управление ракетой с характеристиками планера, изменяющимися синхронно с импульсами управления. Причем при действии импульса управления реализуются характеристики, соответствующие аэродинамически неустойчивой в полете ракете, а при отсутствии импульса - аэродинамически устойчивой в полете ракете.
Следует отметить, что частота следования импульсов управления выбирается такой, чтобы угловые колебания ракеты при τ = τmax не превышали величины угла αmax, в пределах которого ракета остается устойчивой без рулей.
Для установления аэродинамических рулей по воздушному потоку при нулевом уровне входного сигнала положение оси вращения и конфигурацию рулей выбирают таким образом, чтобы центр давления аэродинамических сил на руле находился позади оси вращения рулей, а момент сил трения подвижных частей привода должен быть меньше шарнирного момента, действующего на рули.
Источники информации
1. Неупокоев Ф.К. Стрельба зенитными ракетами.- М.: Воениздат, 1991 г., стр. 48.
2. Дмитриевский А. А., Казаковцев В.П. и др. Движение ракет. - М.: Военное издательство, 1968 г., стр. 185.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА АТАКИ УПРАВЛЯЕМОГО СНАРЯДА В ПОЛЕТЕ, СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВА ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2218550C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И БЛОК РУЛЕВОГО ПРИВОДА (ВАРИАНТЫ) | 2005 |
|
RU2288439C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ С РАЗДЕЛЯЮЩИМИСЯ СТУПЕНЯМИ И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2148777C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2179296C2 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ С АЭРОДИНАМИЧЕСКИМИ РУЛЯМИ | 2000 |
|
RU2182306C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280232C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ РУЛЕВЫХ ПРИВОДОВ И АВТОПИЛОТОВ УПРАВЛЯЕМЫХ СНАРЯДОВ И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2182702C2 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 2010 |
|
RU2442102C1 |
Изобретение относится к оборонной технике и может быть использовано в комплексах танкового и противотанкового вооружения, а также малогабаритных зенитных комплексах. Техническим результатом изобретения является обеспечение возможности управления малоустойчивыми и неустойчивыми в полете ракетами с аэродинамическими рулями, а также повышение маневренности ракет. Сущность изобретения: команды управления ракетой формируются в виде трехпозиционного широтно-импульсного модулированного сигнала Uвх с одним нулевым и двумя равными по модулю и противоположными по знаку ненулевыми уровнями, а отклонение рулей производят в соответствии с зависимостью: δ = δm•signUвх при ненулевых уровнях Uвх; δ = -α при нулевом уровне Uвх, где δ - угол отклонения рулей относительно продольной оси ракеты; δm - максимальный угол отклонения рулей; α - угол между продольной осью и вектором скорости ракеты. 3 ил.
Способ управления ракетой с аэродинамическими рулями, включающий формирование команд управления, подачу их на рулевой привод ракеты и отклонение аэродинамических рулей в соответствии с управляющими сигналами, отличающийся тем, что команда управления формируется в виде трехпозиционного широтно-импульсного модулированного сигнала Uвх с одним нулевым и двумя равными по модулю и противоположными по знаку ненулевыми уровнями, а отклонение рулей производится в соответствии с зависимостью:
δ = δm•sign Uвх при ненулевых уровнях Uвх;
δ = -α при нулевом уровне Uвх,
где δ - угол отклонения рулей относительно продольной оси ракеты;
δm - максимальный угол отклонения рулей;
α - угол между продольной осью и вектором скорости ракеты.
| ДМИТРИЕВСКИЙ А.А | |||
| и др | |||
| Движение ракет | |||
| - М.: Военное издательство, 1968, с | |||
| Способ укрепления под покрышкой пневматической шины предохранительного слоя или манжеты | 1917 |
|
SU185A1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ КЛАССА "ВОЗДУХ-ВОЗДУХ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099665C1 |
| СПОСОБ ПРОВЕДЕНИЯ СОСТЯЗАНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ И ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2261133C1 |
| US 4542870 A, 24.09.1985 | |||
| US 4898341 A, 06.02.1990 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |

