Изобретение относится к космической технике и может быть использовано для высокоточной стыковки космических объектов, например космической станции с космическим кораблем, а также в устройствах стыковки воздушных летательных аппаратов, подводных аппаратов и других подвижных объектов.
Известна орбитальная станция серии "Салют", включающая жесткий переходной отсек с системой для стыковки с космическими кораблями серий "Союз" и "Прогресс" (Советский энциклопедический словарь. /Гл. ред. А.М. Прохоров, 3-е изд. - М.: Сов. энциклопедия, 1985, с.1158).
Известна орбитальная станция "Мир", включающая жесткий переходной отсек с шестью стыковочными узлами (Новый иллюстрированный энциклопедический словарь. /Ред. кол.: В.И. Бородулин, А.П. Горкин, А.А. Гусев, Н.М. Ланда и др. - М.: Большая Российская энциклопедия, 1999, с.457).
Известен космический объект, содержащий жесткий корпус и стыковочные устройства, герметично связанные с ним через переходные отсеки, каждый из которых выполнен в виде упругой оболочковой конструкции сильфонного типа, подкрепленной несущим каркасом из стержневых элементов (Беляков И.Т., Борисов Ю.Д. Основы космической технологии. Учебное пособие для вузов. - М.: Машиностроение, 1980, с.109-110, рис.3.7 - прототип).
Указанные космический объект и орбитальные станции имеют следующие недостатки:
1. в случае недостаточно точного сближения космического корабля с космическим объектом (орбитальной станцией) при проведении стыковки возникает опасность нештатного соударения, способного привести к аварийной ситуации, например, как это имело место в двух общеизвестных случаях с орбитальной станцией "Мир", а при своевременной отмене процесса стыковки и проведении маневров для ее повтора возникает опасность потери космического корабля из-за нехватки запасов топлива;
2. в случае недостаточного погашения скорости сближения космического корабля с космическим объектом (орбитальной станцией) при их стыковке неизбежно последует удар, способный привести к возникновению нештатной ситуации в работе систем космического корабля и космического объекта (орбитальной станции), а также повреждению элементов их конструкций.
Техническим результатом изобретения является повышение надежности стыковки космического объекта (орбитальной станции) с космическим кораблем.
Это достигается тем, что в устройстве стыковки космического объекта, содержащем стыковочное устройство, герметично связанное с жестким корпусом через переходной отсек, выполненный в виде упругой оболочковой конструкции сильфонного типа, подкрепленной несущим каркасом из стержневых элементов, несущий каркас, установленный соосно с переходным отсеком между жестким корпусом и стыковочным устройством с возможностью его пространственной ориентации и парирования удара при стыковке, выполнен в виде приводного шестиподвижного кинематического соединения, включающего платформу и основание с трехосными блоками акселерометров, связанные между собой замкнутой кинематической цепью, каждое из соединительных звеньев которой содержит линейный двигатель, датчики относительного перемещения и относительной скорости и две сферические кинематические пары, одна из которых выполнена с ограничителем от вращения соединительного звена относительно его продольной оси, при этом основание и платформа жестко связаны соответственно с жестким корпусом и стыковочным устройством, а линейные двигатели, датчики относительного перемещения и относительной скорости и трехосные блоки акселерометров, установленные в местах стыковки смежных соединительных звеньев с основанием и платформой, электрически связаны с бортовой системой управления, а сферические кинематические пары соединительных звеньев выполнены в виде эквивалентной им комбинации кинематических пар.
На чертеже приведены общий вид и упрощенная кинематическая схема несущего каркаса.
На фиг. 1 изображен общий вид космического объекта со стыкованным и стыкующимся космическими кораблями. Один из переходных отсеков устройства стыковки космического объекта показан в разрезе.
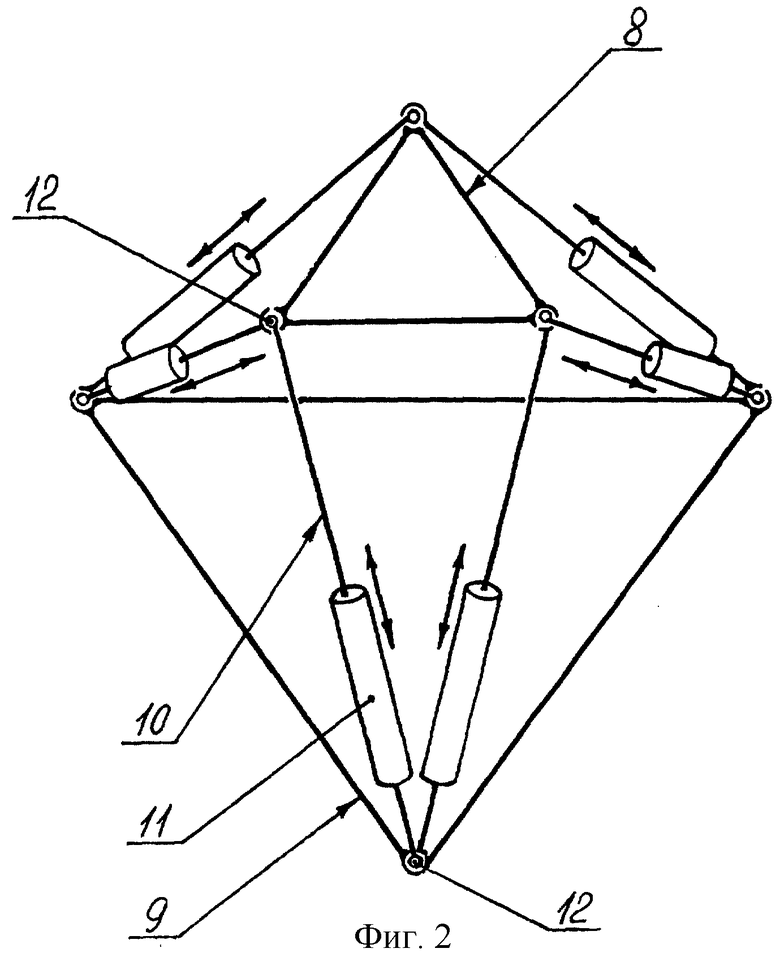
На фиг. 2 представлена упрощенная кинематическая схема несущего каркаса устройства стыковки космического объекта.
Устройство стыковки космического объекта реализовано следующим образом.
Устройство стыковки 1 космического объекта 2, взаимодействующее с космическим кораблем 3, содержит стыковочное устройство 4, герметично связанное с жестким корпусом 5 через переходной отсек 6, выполненный в виде упругой оболочковой конструкции сильфонного типа, подкрепленной несущим каркасом 7 в виде приводного шестиподвижного кинематического соединения (Крайнев А.Ф. Словарь-справочник по механизмам, 2-е изд. , перераб. и доп. - М.: Машиностроение, 1987, с.337-338, статья "Приводное шестиподвижное кинематическое соединение"), включающего платформу 8 и основание 9 с трехосными блоками акселерометров (условно не показаны), связанные между собой замкнутой кинематической цепью, каждое из соединительных звеньев 10 которой содержит линейный двигатель 11, датчики относительного перемещения и относительной скорости (условно не показаны) и две сферические кинематические пары 12, одна из которых выполнена с ограничителем от вращения соединительного звена 10 относительно его продольной оси, при этом основание 9 и платформа 8 жестко связаны соответственно с жестким корпусом 5 и стыковочным устройством 4, а линейные двигатели 11, датчики относительного перемещения и относительной скорости и трехосные блоки акселерометров, установленные в местах стыковки смежных соединительных звеньев 10 с основанием 9 и платформой 8, электрически связаны с бортовой системой управления (условно не показаны).
Работает устройство стыковки 1 космического объекта 2 следующим образом.
При сближении космического корабля 3 с космическим объектом 2 (верхняя часть фиг.1) в случае несоосности его стыковочного устройства и стыковочного устройства 4 космического объекта 2 от бортовой системы управления подается команда на линейные двигатели 11, под действием которых по показаниям датчиков относительного перемещения осуществляется согласованное изменение длин соединительных звеньев 10, при этом стыковочное устройство 4 ориентируется в пространстве, адаптируясь к стыковочному устройству приближающегося космического корабля 3 до обеспечения требуемой для надежной стыковки соосности, после чего линейные двигатели 11 выключаются и несущий каркас 7 в виде приводного шестиподвижного кинематического соединения превращается в пространственную ферму, способную воспринимать эксплуатационные механические нагрузки.
В случае недостаточного погашения скорости сближения космического корабля 3 с космическим объектом 2 при их стыковке, по команде от бортовой системы управления в момент соударения их стыковочных устройств включаются линейные двигатели 11 и осуществляется согласованное уменьшение длин соединительных звеньев 10 со скоростью, задаваемой по показаниям датчиков относительной скорости и относительного перемещения, а также акселерометров, установленных на платформе 8, в результате чего обеспечивается парирование ударной нагрузки. Контроль механического ударного воздействия на космический объект 2 осуществляется по показаниям акселерометров, установленных на основании 9. При этом управление линейными двигателями 11 ведется таким образом, чтобы показания акселерометров, установленных на основании 9, не выходили за допустимые пределы.
После завершения стыковки космического корабля 3 с космическим объектом 2 по команде от бортовой системы управления включаются линейные двигатели 11 и согласованным изменением длин соединительных звеньев 10 устройство стыковки 1 с космическим кораблем 3 плавно переводится в исходное пространственное положение (нижняя часть фиг.1). Сохранение герметичности переходного отсека 6 при пространственных перемещениях стыковочного узла 4 достигается за счет его выполнения в виде упругой оболочковой конструкции сильфонного типа.
Предлагаемое устройство стыковки космического объекта позволяет не только повысить надежность его стыковки с космическим кораблем, но и расширить функциональные возможности космического объекта, например, в части низкочастотной активной виброизоляции платформы 8 при необходимости обеспечения требуемого уровня микрогравитации на космическом корабле 3 в условиях совместного с космическим объектом 2 орбитального полета, а также ее высокоточного углового наведения в пространстве.
Заявка подготовлена при финансовой поддержке Российского Фонда Фундаментальных Исследований; проект 0001 00217.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ОТ КОЛЕБАНИЙ УПРУГОЙ КОНСТРУКЦИИ КОСМИЧЕСКОЙ ТРАНСФОРМИРУЕМОЙ АНТЕННЫ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2161109C1 |
| КОСМИЧЕСКИЙ АППАРАТ | 1992 |
|
RU2072951C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2009881C1 |
| КОСМИЧЕСКИЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ОБЕСПЕЧЕНИЯ УСЛУГ ПО ЗАПУСКУ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ КОСМИЧЕСКОГО РАКЕТНОГО КОМПЛЕКСА | 2001 |
|
RU2179941C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА | 1990 |
|
RU2009882C1 |
| ПРИСТРОЙКА К КОСМИЧЕСКОЙ СТАНЦИИ | 1995 |
|
RU2125526C1 |
| Многоразовый модульный трансатмосферный аппарат | 2022 |
|
RU2787063C1 |
| НАДУВНОЙ АВТОНОМНЫЙ КОСМИЧЕСКИЙ МОДУЛЬ | 2003 |
|
RU2241644C1 |
| КОСМИЧЕСКИЙ КОРАБЛЬ | 2002 |
|
RU2214948C1 |
| РОБОТОТЕХНИЧЕСКАЯ ТЕХНОЛОГИЧЕСКАЯ УСТАНОВКА | 1993 |
|
RU2063329C1 |
Изобретение предназначено для высокоточной стыковки космических объектов, а также воздушных летательных и подводных аппаратов. Устройство содержит стыковочное устройство, которое герметично связано с жестким корпусом через переходной отсек сильфоннного типа, подкрепленный несущим каркасом из стержневых элементов. Несущий каркас установлен соосно с переходным отсеком между корпусом и стыковочным устройством с возможностью его пространственной ориентации и парирования удара при стыковке. Несущий каркас выполнен в виде приводного шестиподвижного кинематического соединения. Изобретение позволяет повысить надежность стыковки космического объекта (орбитальной станции) с космическим кораблем, а также расширить функциональные возможности космического объекта. 1 з.п. ф-лы, 2 ил.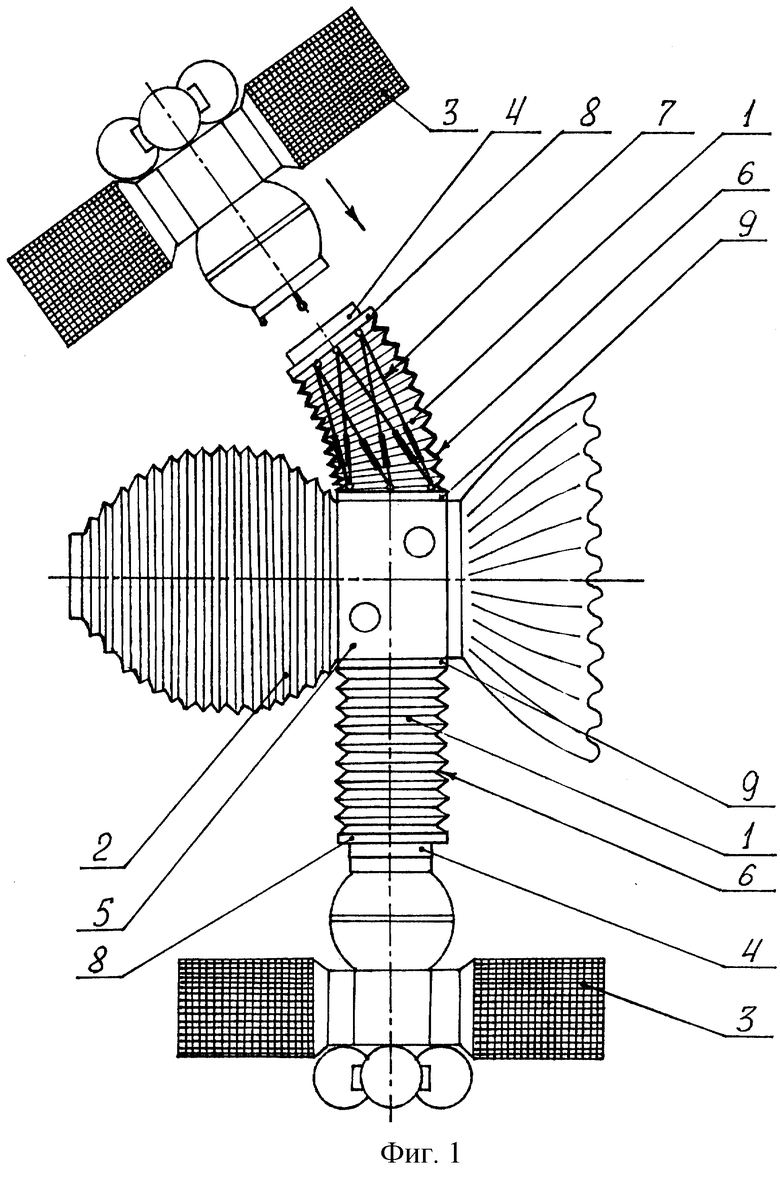
| Беляков И.Т., Борисов Ю.Д | |||
| Основы космической технологии | |||
| Учебное пособие для вузов | |||
| - М.: Машиностроение, 1980, с.109-110, рис.3.7 | |||
| RU 2059542 C1, 10.05.1996 | |||
| НАКЛОННЫЙ АДАПТЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ НЕСКОЛЬКИХ ПОЛЕЗНЫХ НАГРУЗОК НА ОДНОЙ РАКЕТЕ-НОСИТЕЛЕ | 1996 |
|
RU2155146C2 |
| US 4381092 А, 26.04.1983 | |||
| US 4500057 А, 19.02.1985. | |||

