Изобретение относится к области машиностроения и промышленной робототехники и может быть использовано, например, для координатной привязки промышленных роботов к технологическому оборудованию, аттестации геометрических параметров роботов и т. д.
Известен способ определения положения наконечника измерительной головки робота [1] , по которому определяют положение наконечника измерительной головки относительно ее корпуса. Недостатком такого способа, при котором головка устанавливается на специальном стенде, является то, что после установки измерительной головки на робот из-за неизбежных смещений неизвестно точное положение корпуса головки относительно конечного звена робота, поэтому возникающие погрешности положения наконечника головки относительно конечного звена робота не могут быть учтены при последующем использовании робота.
Наиболее близким к заявляемому способу по технической сущности и достигаемому результату является способ определения положения наконечника измерительной головки робота, заключающийся в том, что перемещают конечное звено робота с закрепленной на нем измерительной головкой в рабочем пространстве робота, измеряют параметры фиксированных положений элементов головки и по ним определяют положение наконечника измерительной головки с системе координат робота [2] .
Недостаток такого способа, принятого за прототип, заключается в том, что в общем случае при перемещениях измерительной головки в движение вовлекается несколько степеней свободы робота, а положение наконечника измерительной головки в системе координат робота определяют по измерительной информации, полученной от датчиков положения звеньев робота, которые, как правило, являются гораздо более грубыми, чем требуемая точность определения положения наконечника измерительной головки.
Способ, принятый за прототип, дает приемлемые результаты только при декартовой компоновке робота, когда перемещения и измерения положений наконечника измерительной головки осуществляют по трем поступательным степеням свободы робота с датчиками достаточно высокой точности. При всех других компоновках роботов, имеющих различные комбинации поступательных и вращательных степеней свободы, а особенно в случае антропоморфных роботов, данный способ не может обеспечить требуемую точность определения положения наконечника, соизмеримую с точностью самой измерительной головки. В результате резко снижается точность последующей привязки робота к технологическому оборудованию, а значит, точность выполнения роботом тех или иных технологических операций. Аналогично ухудшается и точность аттестации геометрических параметров робота и т. д.
Цель изобретения - повышение точности определения положения наконечника измерительной головки робота за счет использования внешних измерительных устройств вместо собственных датчиков робота.
Указанная цель достигается за счет того, что в способе определения положения наконечника измерительной головки робота, заключающемся в том, что перемещают конечное звено робота с закрепленной на нем измерительной головкой в рабочем пространстве робота, измеряют параметры фиксированных положений элементов головки и по ним определяют положение наконечника измерительной головки в системе координат робота. В рабочем пространстве робота размещают датчик линейных перемещений с плоским наконечником, последовательно устанавливают два базисных относительных положения конечного звена робота и датчика, при которых линия измерения датчика параллельна одной из осей системы координат конечного звена робота, перпендикулярных оси вращения этого звена, устанавливают к каждому из базисных положений дополнительное путем поворота конечного звена робота на 180о вокруг собственной оси вращения. В каждом из этих четырех фиксированных положений снимают показания датчика при перемещении его наконечника и касании с наконечником измерительной головки. Координаты центра наконечника в системе координат конечного звена робота определяют по полуразностям показаний датчика для каждого из базисных положений и дополнительного к нему.
Дополнительное отличие состоит в том, что переход от одного базисного положения к другому выполняют путем установки датчика в новое положение ортогонально его первоначальному положению.
Еще одно отличие состоит в том, что переход от одного базисного положения к другому выполняют путем поворота конечного звена робота на 90о вокруг его оси вращения.
Проведенный поиск по научно-техническим и патентным источникам информации и выбранный прототип позволили выявить отличительные признаки в изобретении, следовательно, заявленный способ удовлетворяет критерию "новизна", а поскольку признаки, отличающие заявляемое техническое решение от прототипа, и свойства, проявляемые этими признаками, не совпадают с признаками известных решений и их свойствами, то, следовательно, изобретение удовлетворяет критерию "существенные отличия".
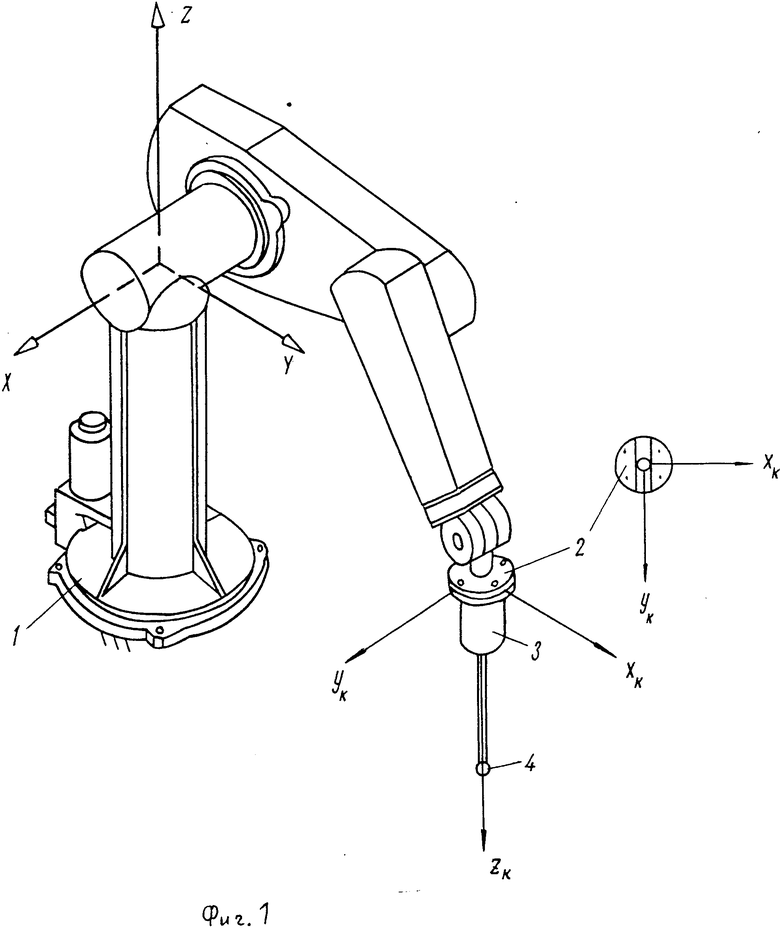
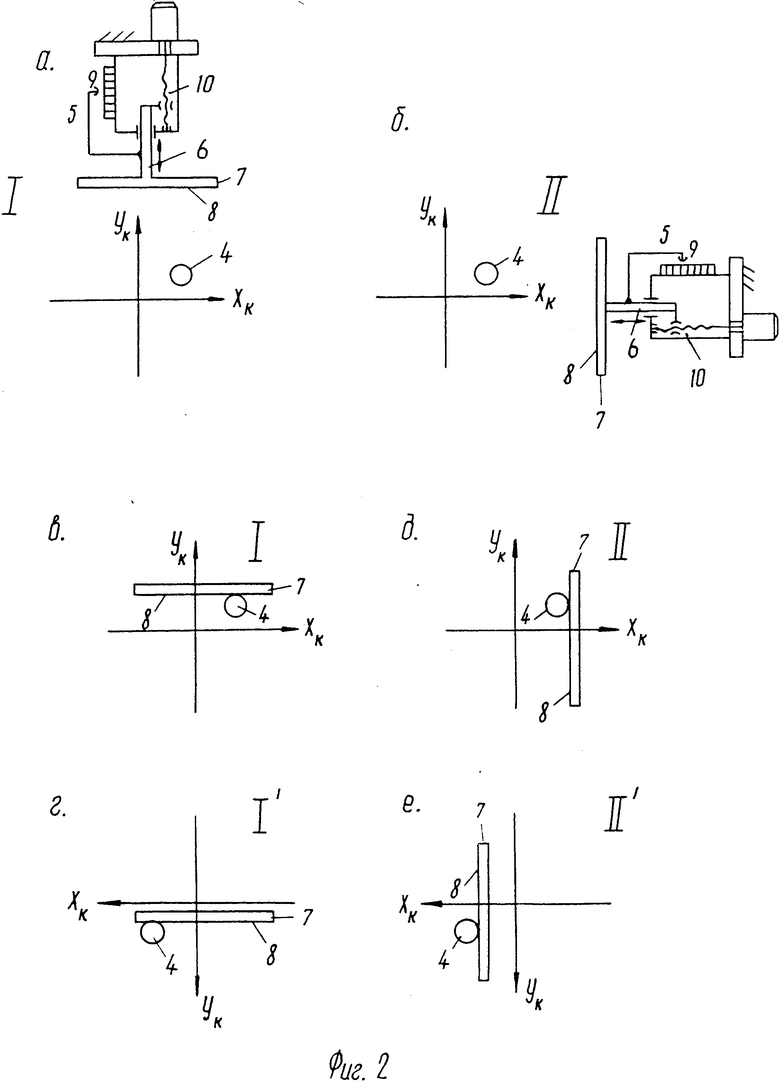
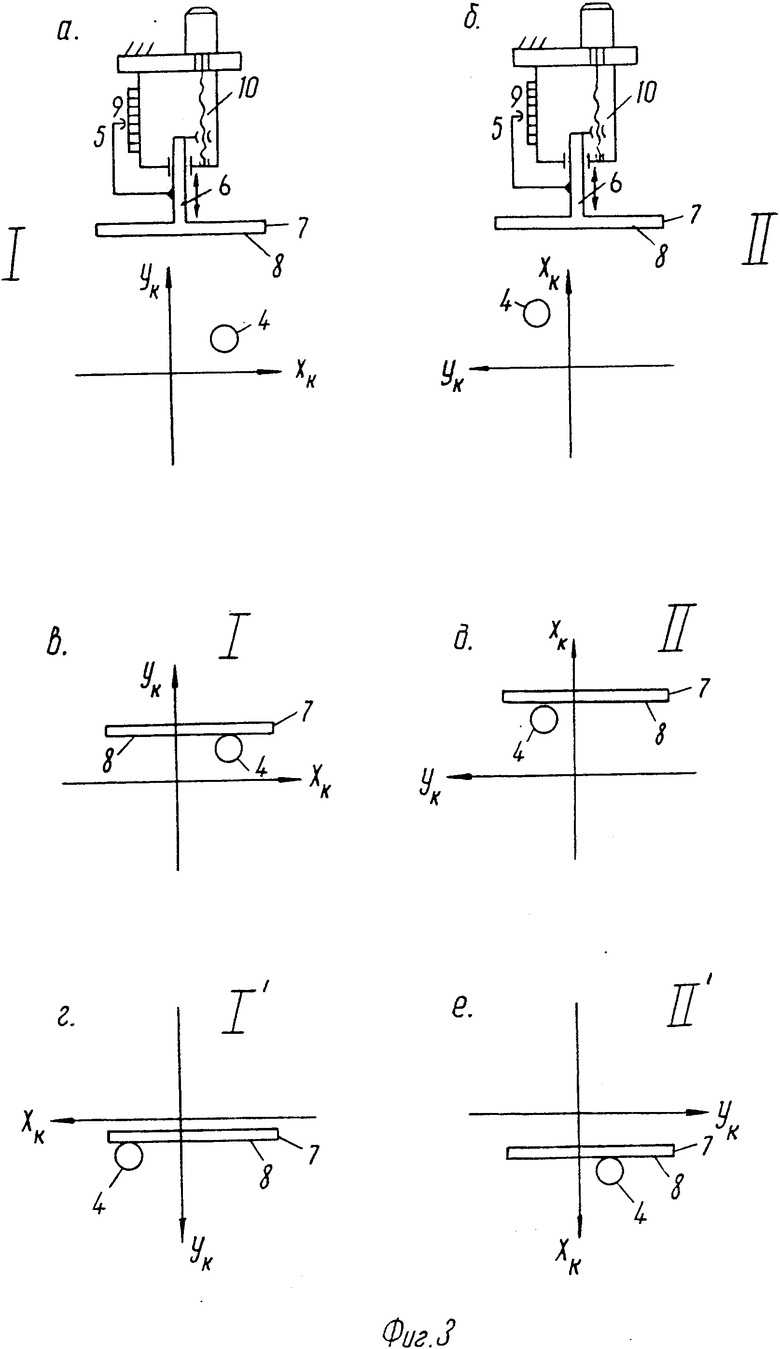
Изобретение поясняется фиг. 1, 2 и 3. На чертежах обозначено: 1 - робот; 2 - фланец конечного звена робота; 3 - корпус измерительной головки робота; 4 - наконечник измерительной головки; 5 - датчик линейных перемещений; 6 - шток датчика; 7 - наконечник штока датчика; 8 - плоский торец наконечника датчика; 9 - шкала датчика; 10 - привод микроперемещений для арретирования и перемещения штока датчика; I и II - базисные относительные положения конечного звена робота и датчика; I' и II'' - дополнительные к базисным положения.
Для определения положения наконечника измерительной головки в неподвижной системе координат робота XYZ (что необходимо для качественного выполнения роботом последующих технологических операций) достаточно знать положение этого наконечника в системе координат конечного звена робота. Поскольку каждое звено руки робота имеет связанную с этим звеном систему координат, то пересчет положения точки из одной системы координат в другую является вполне освоенной процедурой, а, например, определение положения точки в неподвижной системе координат по известному положению этой точки в системе координат конечного звена робота входит в состав матобеспечения большинства современных роботов. Таким образом, определение координат наконечника измерительной головки робота в системе координат его конечного звена одновременно означает определение координат наконечника в неподвижной системе координат робота.
К фланцу 2 конечного звена робота 1 жестко крепится корпус 3 измерительной головки. Конечное звено робота, несущее измерительную головку, выводится оператором в некоторую область рабочего пространства робота, где установлен связанный с основанием датчик 5 линейных перемещений.
В качестве датчика могут использоваться различные измерительные преобразователи, например простейшие индикаторы часового типа с визуальным отсчетом показаний, индуктивные, растровые и другие измерительные преобразователи с аналоговыми или цифровыми выходными сигналами. Для уменьшения погрешности измерений при контакте наконечника измерительной головки и наконечника датчика в случае его упругой подвески, т. е. при взаимодействии двух упругих систем, недопустимо, чтобы измерительное усилие датчика было соизмеримо с измерительным усилием головки. Для арретирования и перемещения наконечника датчика в зону измерения могут использоваться различные приводы микроперемещений (ручные или автоматизированные), содержащие каретки, рычажные механизмы и т. д.
Шток 6 датчика 5 имеет измерительный наконечник 7 с плоским торцом 8, что позволяет измерять датчиком расстояния до плоскости, касательной к наконечнику измерительной головки. Торец 8 может и не быть перпендикулярным линии измерения датчика, однако в случае перпендикулярности обеспечиваются наилучшие характеристики, и, в частности, увеличивается зона измерения.
Для осуществления предлагаемого способа конечное звено робота и датчик устанавливают в одно из базисных относительных положений, при которых линия измерения датчика параллельна одной из осей Xk или Ykсистемы координат XkYkZk конечного звена робота. Эти оси перпендикулярны оси Zk, совпадающей с осью вращения фланца 2. Наконечник датчика вначале арретирован, т. е. выведен из зоны измерения.
Параллельность линии измерения датчика осям Xk или Ykустанавливают по выступающим концам специальной шпильки, фиксируемой в пазу фланца конечного звена робота или, например, при помощи двух (или одной) прямолинейных направляющих, расположенных на основании перпендикулярно друг другу. С пульта управления робота задают в системе координат XkYkZk перемещения его конечного звена вдоль какой-либо из этих направляющих и, обеспечивая взаимодействие с ней наконечника измерительной головки, используя ее измерительную информацию, добиваются параллельности осей Xk или Yk одной из указанных направляющих, а параллельно ей ориентируют линию измерения датчика 5.
При установке исходного относительного положения конечного звена робота и датчика обеспечивают такое положение датчика вдоль оси Zk, чтобы шаровой наконечник 4 измерительной головки располагался примерно на средней линии плоскости торца 8.
Датчик в исходном положении (фиг. 2 и 3) располагается относительно конечного звена робота таким образом, чтобы наконечник датчика при перемещении в пределах его диапазона положений, соответствующих диапазону показаний датчика, пересекал ось вращения конечного звена робота и мог касаться наконечника головки при различных углах ее поворота. Способ обеспечивает возможность определения координат наконечника при различных соотношениях между радиусом наконечника и величиной эксцентриситета, в том числе и в тех практически важных случаях, когда величина эксцентриситета превышает радиус наконечника.
В рассматриваемом примере в первом базисном положении конечного звена робота и датчика (на фиг. 2 и 3 обозначено римской цифрой I) ось датчика параллельна оси Xk, а во втором базисном положении (обозначено римской цифрой II) ось датчика параллельна оси Yk. Дополнительные к базисным положения, образуемые поворотом конечного звена робота на 180овокруг его оси вращения, обозначены соответственно I' и II'.
Переход от одного базисного положения к другому может осуществляться двумя способами. В первом случае (фиг. 2) переход осуществляется путем установки самого датчика ортогонально его первоначальному положению. Во втором случае (фиг. 3) положение датчика не изменяется, а переход от одного базисного положения к другому достигается лишь за счет поворота конечного звена робота на 90о вокруг его оси вращения.
Итак, рассматриваемый способ характеризуется предельной простотой, в нем используется один датчик, а информация, необходимая для определения положения наконечника измерительной головки, обеспечивается в четырех фиксированных положениях конечного звена робота и датчика.
В каждом из этих положений перемещают при помощи привода микроперемещений наконечник 7 датчика из его арретированного положения до касания с наконечником измерительной головки и снимают показания датчика, а затем наконечник вновь арретируют. Моменты касания фиксируют либо электроконтактным способом, либо по сигналу самой измерительной головки.
По этим четырем показаниям определяют координаты Xн, Yн центра наконечника измерительной головки в системе координат конечного звена робота, а именно по полуразностям показаний датчика для каждого из базисных положений и дополнительного к нему
Xн=  , Yн=
, Yн=  , где AI, AI′, AII, AII′ - показания датчиков в базисных и дополнительных к базисным положениях конечного звена робота и датчика.
, где AI, AI′, AII, AII′ - показания датчиков в базисных и дополнительных к базисным положениях конечного звена робота и датчика.
По известным координатам Хн, Yн центра наконечника в системе координат XkYkZk (а значит после пересчета и в системе координат XYZ) можно определить координаты точек поверхности внешних объектов, например, для привязки робота к технологическому оборудованию. Координаты этих точек, с которыми взаимодействует наконечник измерительной головки, в неподвижной системе координат определяют путем решения прямой задачи кинематики (это имеется в составе матобеспечения большинства современных наиболее совершенных роботов).
Использование предлагаемого способа позволяет повысить точность определения положения наконечников измерительных головок, устанавливаемых на роботах различной кинематической структуры, т. к. точность определения положения центра наконечника головки не зависит от точностных характеристик собственных датчиков робота, а определяется весьма высокими точностными свойствами внешнего стационарного датчика, размещаемого в рабочем пространстве робота. Кроме того, перемещения измерительной головки осуществляются только за счет одной степени свободы робота. При этом в движение не вовлекаются другие степени свободы, которые, таким образом, не влияют на точность определения положения наконечника.
Повышение точности определения положения наконечника измерительной головки в системе координат робота обеспечивает повышение точности привязки робота к технологическому оборудованию, аттестации геометрических параметров робота и способствует повышению качества выполнения роботом различных технологических операций.
Предлагаемый способ может быть использован и для определения положения в системе координат робота рабочей точки технологических инструментов и деталей, удерживаемых конечным звеном робота. В качестве примеров можно указать рабочую точку сварочного электрода роботов для дуговой сварки, наконечник устройства истечения клея в роботах для нанесения клеевых покрытий и т. д. (56) 1. Горохов Л. Я. , Тененбаум Ю. З. Установка для поверки измерительных головок//Измерительная техника, 1985, 12, с. 8-9.
2. Конструктивные элементы координатных измерительных машин, управляемых ЭВМ, фирмы "Оптон". Проспект фирмы "Оптон", 1985, с. 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2009881C1 |
| РОБОТОТЕХНИЧЕСКАЯ ТЕХНОЛОГИЧЕСКАЯ УСТАНОВКА | 1993 |
|
RU2063329C1 |
| СПОСОБ СБОРКИ ГИПОИДНОЙ ПЕРЕДАЧИ | 1991 |
|
RU2010137C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ЗУБЧАТЫХ РЕДУКТОРОВ | 1993 |
|
RU2035714C1 |
| Способ управления роботом | 1988 |
|
SU1579771A1 |
| УСТРОЙСТВО СТЫКОВКИ КОСМИЧЕСКОГО ОБЪЕКТА | 2000 |
|
RU2195417C2 |
| СПОСОБ ИССЛЕДОВАНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА | 1991 |
|
RU2009493C1 |
| Способ аттестации геометрических параметров механической руки промышленного робота | 1984 |
|
SU1258689A1 |
| УСТРОЙСТВО ДЛЯ ДЕМОНСТРАЦИИ ГЕОЦЕНТРИЧЕСКОГО ПОЛОЖЕНИЯ И ДВИЖЕНИЯ СПУТНИКОВ ЗЕМЛИ | 1991 |
|
RU2024957C1 |
| Способ контроля качества воспроизведения программы движения робота-манипулятора и устройство для его осуществления | 1985 |
|
SU1377179A1 |
Использование: в машиностроении, для координатной привязки промышленных роботов к технологическому оборудованию. Сущность изобретения: конечное звено робота последовательно устанавливают в два базисных положения. При этом ось чувствительности датчика параллельна одной из осей системы координат конечного звена робота, перпендикулярных оси вращения этого звена. Снимают показания с датчика. Затем конечное звено робота устанавливают относительно датчика в дополнительное к каждому из базисных положение путем поворота конечного звена робота на 180вокруг собственной оси вращения и вновь снимают показания с датчика. Координаты центра наконечника измерительной головки в системе координат конечного звена робота определяют по полуразностям показаний датчика для каждого из базисных положений и дополнительного к нему. 2 з. п. ф-лы, 3 ил.
