Изобретение относится к транспортным средствам, а более конкретно к вездеходному дистанционно управляемому транспортному средству. Изобретение может быть использовано как устройство для игр и развлечений, как вездеход для перевозки полезных грузов по воде и по суше, как вездеходный робот для поисковых, исследовательских и других работ в труднодоступной местности или в агрессивной для человека среде.
Управление вездеходом осуществляется дистанционно. На небольших расстояниях используется радиоуправление, инфракрасное управление, ультразвуковое управление или управление по проводам. На больших расстояниях используется управление с помощью навигационной спутниковой системы и бортового компьютера.
Известно использование радиоуправляемых моделей сухопутных и водных транспортных средств для игр и развлечений, например гонки моделей автомобилей, катеров и яхт. Как правило, эти модели копируют форму и конструкцию реальных транспортных средств, что значительно сужает их игровые возможности.
Первый недостаток заключается в том, что существующие модели транспортных средств, как и реальные транспортные средства, боятся столкновений и переворотов. В гоночных соревнованиях именно столкновения обостряют борьбу и дают зрелищу дополнительную эмоциональную окраску. Но после переворота модель не может самостоятельно вернуться в рабочее положение. Требуется вмешательство человека, который должен остановить соревнования, выйти на трассу и поставить модель правильно. Поэтому участники гонок стараются избегать столкновений. Это обстоятельство снижает динамику соревнований и накал страстей. Столкновения также могут привести к поломке моделей. Это связано с тем, что в реальных условиях транспортные средства не предназначены для частых столкновений и переворотов (даже гоночные автомобили), поэтому их модели также не отличаются большой прочностью на удар.
Второй недостаток заключается в том, что существующие модели транспортных средств, как и реальные транспортные средства, имеют ограниченную проходимость. Для колесных и гусеничных транспортных средств ограничением является величина дорожного просвета, то есть расстояние между корпусом транспортного средства и дорожным покрытием.
Третий недостаток заключается в том, что существующие модели транспортных средств, как и реальные транспортные средства, обладают ограниченной маневренностью (минимальный радиус разворота), что не позволяет их использовать в тех играх, где нужны развороты на месте или развороты с малым радиусом.
Четвертый недостаток заключается в том, что существующие модели не обладают качествами амфибий, то есть не могут успешно передвигаться и по воде, и по суше, а это исключает их использование в соревнованиях по пересеченной местности с глубокими водными преградами.
Известно использование существующих транспортных средств с дистанционным управлением для решения различных технических задач, где невозможно непосредственное управление человеком транспортного средства. Например, перевозка груза через зону повышенной радиации или взрывоопасную зону, а также проведение поисковых и исследовательских работ в этих зонах или другой труднодоступной местности. В таких случаях, как правило, используются колесные и гусеничные вездеходы, которые теряют свою работоспособность после переворота, проходимость которых ограничена размером дорожного просвета, маневренность которых ограничена радиусом разворота и которые не имеют качества амфибий.
В авторском свидетельстве СССР 380517 А от 15.05.1973 раскрыто вездеходное дистанционно-управляемое транспортное средство, содержащее корпус, выполненный в виде тела вращения, имеющего ось вращения, параллельную поверхности перемещения, и приводной механизм, размещенный в корпусе и приспособленный под действием сигнала дистанционного управления перемещаться внутри корпуса, смещая центр тяжести транспортного средства и заставляя его перемещаться в направлении смещения центра тяжести.
Приводной механизм этого транспортного средства не имеет соединения с корпусом и оси, которая жестко скреплена с корпусом. В связи с этим при движении корпус может иметь хаотичную ориентацию относительно поверхности и направления движения. Следовательно, на внешней поверхности транспортного средства не может быть установлено дополнительное оборудование, так как оно будет мешать его движению, и нецелесообразно нанесение покрытия с протектором, ориентированным по направлению движения, когда корпус при движении ориентируется хаотичным образом.
Корпус известного транспортного средства имеет сквозные отверстия. Следовательно, оно не имеет плавучести и не может передвигаться по воде и другим жидкостям, не может использоваться в агрессивной среде, способной повредить внутренний приводной механизм.
Корпус является мягким корпусом, форму которого поддерживает давление газа во внутренних полостях. При механическом повреждении, например проколе корпуса, транспортное средство теряет форму и возможность передвижения.
В патенте США 2977714 А от 04.04.1961 раскрыто вездеходное дистанционно-управляемое транспортное средство, содержащее корпус, выполненный в виде цилиндра, имеющего ось вращения, параллельную поверхности перемещения, и состоящего из двух частей, соединенных между собой центральной горизонтальной осью, на концах которой расположены шайбы с гайками, скрепляющие две части корпуса в единую конструкцию, и приводной механизм, размещенный в корпусе и приспособленный перемещаться внутри корпуса, смещая центр тяжести транспортного средства и заставляя его перемещаться в направлении смещения центра тяжести.
Данная конструкция имеет один центр тяжести и принципиально не позволяет менять направление во время движения. Транспортное средство может двигаться только тремя заранее установленными способами - по кругу, прямо и хаотичным образом. Способ движения (направление движения) устанавливается заранее гайками, которые регулируют фрикционный контакт каждого колеса с валом.
Вышеописанное транспортное средство не имеет внешнего управления и, следовательно, не может менять скорость движения.
Технической задачей настоящего изобретения является создание вездеходного транспортного средства с дистанционным управлением, обладающего устойчивой работоспособностью в условиях частых столкновений и переворотов, высокой проходимостью, не ограниченной дорожным просветом, малым радиусом разворота и качествами амфибий.
Эта техническая задача решается тем, что в вездеходном дистанционно-управляемом транспортном средстве, содержащем корпус, выполненный в виде шара, имеющего ось вращения, параллельную поверхности перемещения, и приводной механизм, размещенный в корпусе и приспособленный под действием сигнала дистанционного управления перемещаться внутри корпуса, смещая центр тяжести транспортного средства и заставляя его перемещаться в направлении смещения центра тяжести, согласно изобретению приводной механизм содержит центральную горизонтальную ось, проходящую по диаметру шара и жестко соединенную с внутренней поверхностью шара, основную шестерню, закрепленную на оси, свободно установленную на оси с возможностью вращения вокруг нее раму, выполненную в виде перевернутой буквы П, горизонтальная часть которой состоит из внутренней перекладины, расположенной ближе к оси, и внешней перекладины, расположенной под внутренней перекладиной, закрепленные на внутренней перекладине двигатель, соединенный с двигателем редуктор, шестерня которого способна взаимодействовать с основной шестерней и приводить во вращение ось, и приемник аппаратуры радиоуправления, электрически связанный с двигателем, и балансировочный груз, установленный с возможностью перемещения по внутренней перекладине и фиксирования на ней и обеспечивающий горизонтальное положение оси при неподвижном положении шара, грузовую площадку, установленную на внешней перекладине с возможностью перемещения по ней посредством поворотного механизма, закрепленного на грузовой площадке, вызывающего изменение направления движения транспортного средства, и источник питания, закрепленный на грузовой площадке и электрически связанный с приемником аппаратуры радиоуправления.
Во внешней перекладине могут быть выполнены направляющие пазы для перемещения, а грузовая площадка имеет выступы, способные перемещаться по направляющим пазам.
Средство может иметь контейнер полезного груза, закрепленный на грузовой площадке.
Приводной механизм вышеописанного транспортного средства имеет соединение с корпусом через ось, которая жестко скреплена с корпусом. При движении корпус всегда ориентирован определенным образом относительно поверхности и направления движения. Это обеспечивает возможность установки на внешней поверхности корпуса с двух сторон оси дополнительного оборудования, которое крепится с помощью свободно вращающегося соединения и не мешает движению средства даже при наклоне оси на поворотах. На внешней поверхности корпуса может быть нанесено покрытие с протектором, ориентированным по направлению движения.
Корпус данного транспортного средства является герметичным. Поэтому транспортное средство имеет плавучесть и может передвигаться по воде и другим жидкостям. Может использоваться в агрессивной среде без опасности повреждения внутреннего приводного механизма. В то же время корпус является прочным. Даже множественные проколы, которые в прочном корпусе сделать очень сложно, не приводят к потере формы и не приводят к потере возможности передвижения.
Указанная техническая задача решается и тем, что в вездеходном дистанционно-управляемом транспортном средстве, содержащем корпус, выполненный в виде цилиндра, имеющего ось вращения, параллельную поверхности перемещения, и состоящего из двух частей, соединенных между собой центральной горизонтальной осью, на концах которой расположены шайбы с гайками, скрепляющие две части корпуса в единую конструкцию, и приводной механизм, размещенный в корпусе и приспособленный перемещаться внутри корпуса, смещая центр тяжести транспортного средства и заставляя его перемещаться в направлении смещения центра тяжести, согласно изобретению приводной механизм содержит две одинаковые части, каждая из которых имеет полую горизонтальную центральную ось, жестко прикрепленную к внутренней поверхности соответствующей части корпуса и к основной шестерне, при этом ось корпуса проходит внутри двух полых осей, соединяя их таким образом, что обе части корпуса способны свободно вращаться на оси корпуса независимо друг от друга, и имеются стопорная шайба, расположенная на середине оси корпуса, жестко соединенная с ней, фиксирующая положение двух частей корпуса и препятствующая их взаимному трению, две рамы, каждая из которых выполнена в виде перевернутой буквы П, свободно установлена на соответствующей полой оси с возможностью вращения вокруг нее и несет на себе двигатель, соединенный с двигателем редуктор, шестерня которого способна взаимодействовать с основной шестерней и приводить во вращение полую ось и соответствующую часть корпуса, приемник аппаратуры радиоуправления, электрически связанной с двигателем, и источник питания, электрически связанный с приемником аппаратуры радиоуправления.
Средство может иметь контейнер полезного груза, закрепленный на каждой раме.
Приводной механизм вышеописанного транспортного средства имеет две абсолютно одинаковые независимые части и два центра тяжести, эти части могут вращаться как в одном направлении, так и в разных направлениях с одинаковой или разной скоростью. Принцип движения данного транспортного средства основан на суммарном воздействии двух независимых центров тяжести на всю конструкцию в целом.
Конструкция транспортного средства, имеющая два независимых центра тяжести, позволяет менять направление во время движения. Изменение направления движения происходит за счет разности скоростей и направлений вращения двух центров тяжести, которые оказывают суммарное воздействие на всю конструкцию в целом.
Описанное транспортное средство имеет внешнее управление и может менять скорость движения. Причем для каждой части приводного механизма существует свой независимый канал управления (двухканальная аппаратура пропорционального управления). Управление одновременно по двум каналам позволяет плавно менять как направление движения, так и скорость движения. Эти качества являются необходимыми для большинства транспортных средств.
Вездеходное дистанционно-управляемое транспортное средство может иметь разные типы двигателей, например электродвигатель для моделей транспортных средств.
При применении двигателей внутреннего сгорания система вентиляции внутри корпуса может быть осуществлена через отверстия в боковых поверхностях корпуса вблизи оси.
Вездеходное дистанционно-управляемое транспортное средство может иметь амортизационную систему для смягчения ударов. Амортизационная система выполняется известными способами, например с помощью пружин.
Для дистанционного управления может быть использована известная двухканальная аппаратура пропорционального радиоуправления для моделей транспортных средств.
Далее изобретение пояснено более подробно со ссылкой на чертежи, на которых:
фиг. 1 изображает схематический вид в разрезе вездеходного дистанционно-управляемого транспортного средства шаровой формы согласно изобретению;
фиг. 2 - схематический вид поворотного механизма транспортного средства, показанного на фигуре 1;
фиг. 3 - вид в разрезе корпуса вездеходного дистанционно-управляемого транспортного средства шаровой формы повышенной прочности;
фиг. 4 - вид в разрезе амортизационной системы вездеходного дистанционно-управляемого транспортного средства;
фиг.5 - вид в разрезе вездеходного дистанционно-управляемого транспортного средства цилиндрической формы согласно изобретению.
На фигуре 1 показано вездеходное дистанционно-управляемое транспортное средство шаровой формы. Корпус 1 выполнен в виде шара из пластмассы или другого материала, имеющего ось вращения, параллельную поверхности перемещения. В корпусе 1 размещен приводной механизм, приспособленный под действием сигнала дистанционного управления перемещаться внутри корпуса 1, смещая центр тяжести транспортного средства и заставляя его перемещаться в направлении смещения центра тяжести.
Приводной механизм содержит центральную горизонтальную ось 2, проходящую по диаметру шара и жестко соединенную с внутренней поверхностью шара. На оси 2 жестко закреплена основная шестерня 3. На оси 2 свободно установлена с возможностью вращения вокруг нее рама 4, выполненная, например, из металла и имеющая форму перевернутой буквы "П". Горизонтальная часть рамы 4 состоит из внутренней перекладины 5, расположенной ближе к оси 2, и внешней перекладины 6, расположенной под перекладиной 5.
На внутренней перекладине 5 закреплены двигатель 7, соединенный с двигателем 7 редуктор 8, шестерня 9 которого способна взаимодействовать с основной шестерней 3 и приводить во вращение ось 2, приемник 10 аппаратуры радиоуправления с антенной 11, электрически связанный с двигателем 7, и балансировочный груз 12, установленный с возможностью перемещения по внутренней перекладине 5 и фиксирования на ней и обеспечивающий горизонтальное положение оси 2 при неподвижном положении шара. Фиксирование груза 12 на перекладине 5 в нужном положении может осуществляться с помощью болтов и гаек.
На внешней перекладине 6 установлена грузовая площадка 13 таким образом, что она может свободно перемещаться влево и вправо вдоль перекладины 6.
На грузовой площадке 13 крепится поворотный механизм, в качестве которого может быть использована известная рулевая машинка 14, входящая в состав аппаратуры пропорционального радиоуправления моделей транспортных средств.
Аппаратура пропорционального радиоуправления имеет два независимых канала, один из которых управляет двигателем 7, а второй управляет рулевой машинкой 14. Двигатель 7 и рулевая машинка 14 электрически связаны с приемником 10 посредством электрических проводов (на чертеже не показано). В свою очередь приемник 10 электрически связан с источником 15 питания посредством электрических проводов (на чертеже не показано).
На грузовой площадке 13 также закреплены контейнер 16 полезного груза и источник 15 питания.
При большой грузоподъемности транспортного средства может быть достаточным использование части полезного груза для управления направлением движения. В этом случае могут быть использованы два контейнера полезного груза, один из которых расположен вышеописанным образом на грузовой площадке, а другой - жестко закреплен на внутренней перекладине (на чертеже не показан).
Съемные крышки 17 позволяют осуществлять доступ во внутреннее пространство шара. Они также служат для жесткой фиксации оси 2 относительно корпуса 1. Крышка 17 крепится к корпусу 1 известным способом, например с помощью болтов 18 и резьбовых отверстий в корпусе 1.
При использовании ультразвукового или инфракрасного управления транспортным средством на центральной части наружной поверхности каждой крышки 17 устанавливаются приемные датчики (на чертеже не показаны).
При использовании электрического управления транспортным средством на центральной части наружной поверхности каждой крышки 17 устанавливаются вращающиеся контакты для подключения электропроводов (на чертеже не показаны).
В состоянии покоя рама 4 приводного механизма свободно висит на оси 2.
В состоянии движения через приемник 10 аппаратуры радиоуправления включается двигатель 7, который передает вращательное движение через редуктор 8 на ось 2 шара. В результате рама 4 начинает вращательное движение вокруг оси 2. Центр тяжести шара смещается вместе с рамой 4, что заставляет шар катиться в сторону смещения центра тяжести.
Вездеходное дистанционно-управляемое транспортное средство имеет максимальную скорость (максимальный крутящий момент), когда рама 4 приводного механизма находится в положении, параллельном поверхности перемещения, то есть отклонена от положения покоя на 90 градусов. Дальнейшее увеличение угла относительно положения покоя ведет к снижению максимальной скорости (крутящего момента). Для предотвращения увеличения угла более 90 градусов можно использовать известный ограничивающий механизм (на чертеже не показан), например в электрическую схему питания двигателя можно вставить ртутный выключатель. Он крепится к раме таким образом, что при достижении угла 90 градусов происходит отключение питания двигателя (разрыв электрической цепи между двигателем и приемником).
При прямолинейном движении шара, направленном перпендикулярно плоскости чертежа, грузовая площадка 13 находится в центральном сбалансированном положении относительно рамы 4, ось 2 находится в горизонтальном положении относительно поверхности перемещения.
Для изменения направления движения через аппаратуру радиоуправления подается сигнал на поворотный механизм, который перемещает грузовую площадку 13 влево или вправо относительно центра внешней перекладины рамы. В результате бокового смещения центра тяжести ось 2 наклоняется в ту же сторону и шар начинает двигаться по кругу. Чем больше смещение грузовой площадки 13, тем больше наклон оси 2 и тем меньше радиус окружности, по которой катится шар.
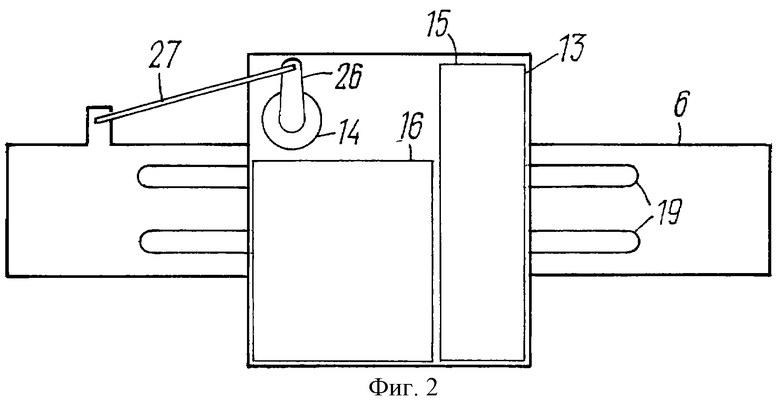
На фиг. 2 представлен поворотный механизм, который перемещает грузовую площадку 13 вдоль нижней перекладины рамы 4. В перекладине 6 выполнены направляющие пазы 19 для перемещения по ним выступов 25 (фиг.1) грузовой площадки 13.
Плечо 26 рулевой машинки 14 соединено с перекладиной 6 через тягу 27. Так как рулевая машинка 14 жестко закреплена на грузовой площадке 13, то при повороте плеча 26 рулевой машинки 14 по или против часовой стрелки грузовая площадка 13 будет перемещаться вдоль направляющих пазов 19 влево или вправо.
На грузовой площадке 13 также расположен контейнер 16 полезного груза и источник 15 питания.
Если вездеходное дистанционно-управляемое транспортное средство предназначено для перевозки грузов, то в реальной конструкции компоновка всех узлов выполняется таким образом, чтобы контейнер 16 полезного груза имел максимально возможный объем. В игровом вездеходном дистанционно-управляемом транспортном средстве контейнер полезного груза может отсутствовать.
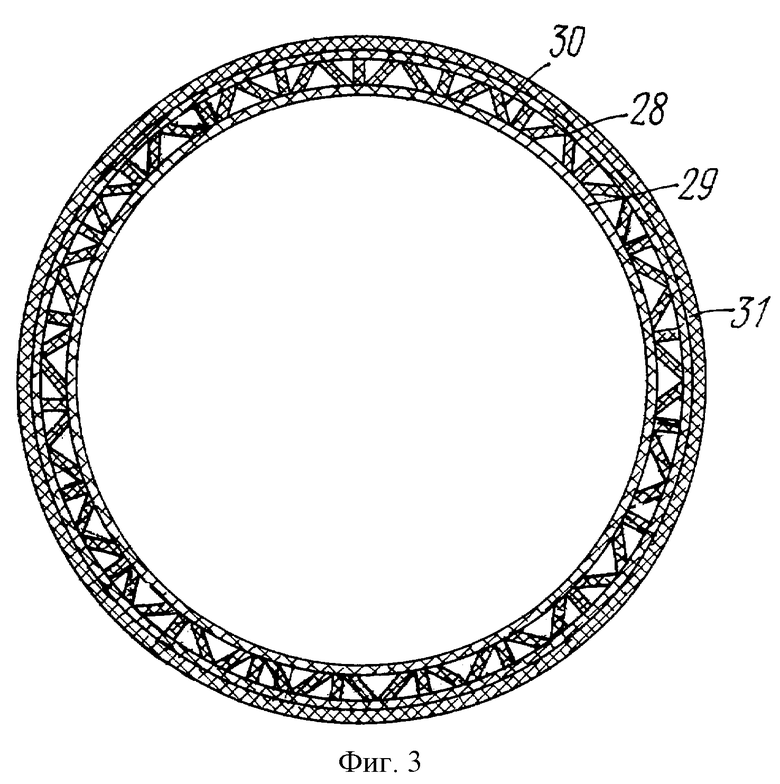
На фиг. 3 представлен вид в разрезе корпуса вездеходного дистанционно-управляемого транспортного средства шаровой формы повышенной прочности. Корпус состоит из внешнего шара 28 и внутреннего шара 29, соединенных между собой с помощью перегородок 30, расположенных по всему периметру корпуса. Перегородки 30 могут иметь трубчатую или другую форму.
Внешняя поверхность вездеходного дистанционно-управляемого транспортного средства может иметь резиновое или другое покрытие 31 с протектором, которое улучшает сцепление с поверхностью движения.
В зависимости от условий использования вездеходного дистанционно-управляемого транспортного средства (только суша, только вода, вода и суша) может применяться разное покрытие и разный протектор, которые оптимальным образом обеспечивают необходимые ходовые качества.
Покрытие может прикрепляться к корпусу частями известным способом, например с помощью клея или с помощью болтов и гаек. Части покрытия могут иметь разную форму, например шестигранную, как у футбольного мяча.
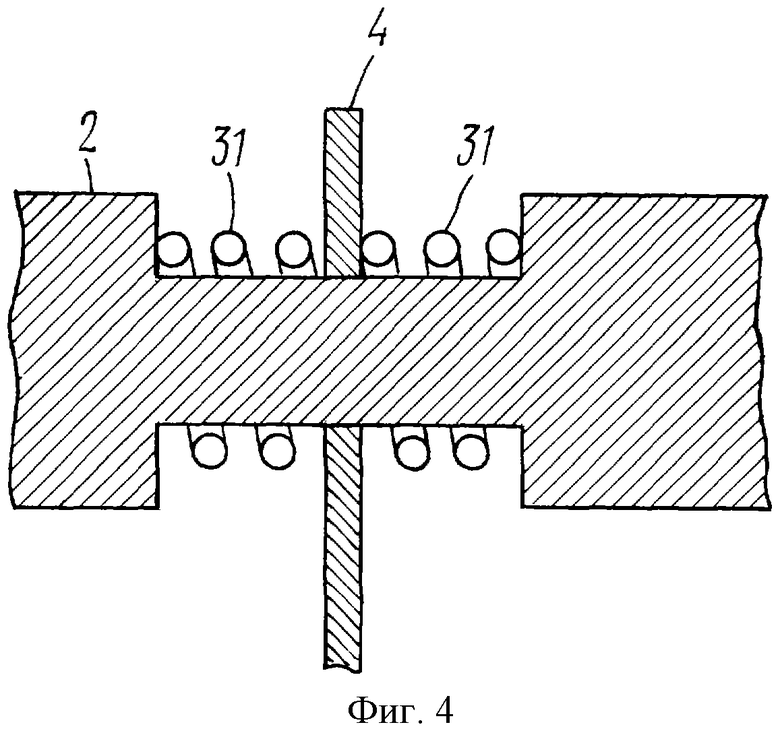
На фиг. 4 изображена амортизационная система, смягчающая удары, которые передаются от корпуса через ось 2 на раму 4 приводного механизма. Рама 4 соединяется с осью 2 таким образом, что пружины 31 смягчают удары, направленные параллельно оси. Удары, направленные перпендикулярно оси, гасятся вращательным движением рамы 4.
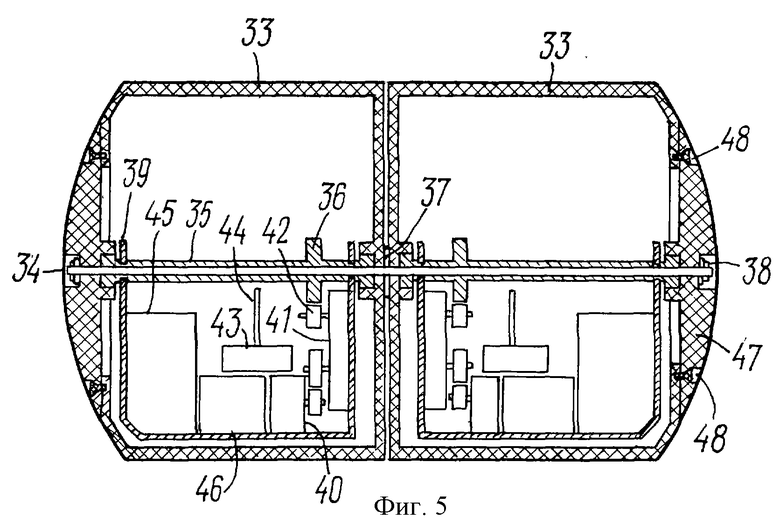
На фиг. 5 представлен вид в разрезе вездеходного дистанционно-управляемого транспортного средства цилиндрической формы. Оно имеет две одинаковые части 33 корпуса 1, соединенные между собой центральной горизонтальной осью 34. Каждая часть 33 корпуса имеет внутри приводной механизм, содержащий полую ось 35, жестко соединенную с частью 33 корпуса. На полой оси 35 крепится основная шестерня 36.
Центральная ось 34 проходит через обе полые оси 35 двух частей 32 корпуса, соединяя их таким образом, что оба корпуса 32 могут свободно вращаться на центральной оси 34 независимо друг от друга. На середине центральной оси 34 расположена стопорная шайба 37, которая жестко соединена с осью 34. Она фиксирует положение двух частей 32 корпуса и препятствует их взаимному трению. На концах центральной оси располагаются шайбы с гайками 38, которые скрепляют обе части 32 корпуса в единую конструкцию.
В каждой части 32 корпуса расположена рама 39, установленная на оси 35 таким образом, что может вращаться свободно вокруг оси 35. Рама 38 может быть выполнена из металла. Она висит на оси 35 и может иметь форму перевернутой буквы П.
На раме 39 крепятся двигатель 40, соединенный с двигателем 40 редуктор 41, шестерня 42 которого способна взаимодействовать с основной шестерней 36 и приводить во вращение полую ось 35 и часть 33 корпуса, приемник 43 аппаратуры радиоуправления с антенной 44, электрически связанный с двигателем 39, контейнер 45 полезного груза и источник 46 питания, электрически связанный с приемником 43.
Съемные крышки 47 позволяют осуществлять доступ во внутреннее пространство корпуса. Они также служат для жесткой фиксации оси 34 относительно корпуса. Крышка 47 крепится к корпусу известным способом, например с помощью болтов 48 и резьбовых отверстий в корпусе.
Принцип прямолинейного движения в этой конструкции такой же, как и в конструкции, изображенной на фиг.1. Отличие заключается в том, что в последней отсутствует поворотный механизм.
Управление направлением движения в последней конструкции осуществляется за счет разности скоростей и направлений движения двух частей корпуса.
Если обе части 33 корпуса катятся в одном направлении с одинаковой скоростью, то вездеходное дистанционно-управляемое транспортное средство движется прямолинейно, т.е. перпендикулярно плоскости чертежа.
Если обе части 33 корпуса катятся в одном направлении с разными скоростями, то вездеходное дистанционно-управляемое транспортное средство совершает поворот в сторону части 33 корпуса, имеющей меньшую скорость.
Если части 33 корпуса катятся в разных направлениях, то вездеходное дистанционно-управляемое транспортное средство совершает разворот на месте.
Преимущества шаровой конструкции перед цилиндрической заключаются в том, что шаровая форма имеет большую прочность, чем цилиндрическая.
Преимущество цилиндрической конструкции состоит в том, что она может разворачиваться на месте, то есть радиус разворота равен нулю.
Минимальные размеры вездеходного дистанционно-управляемого транспортного средства ограничены только размерами составных частей приводного механизма.
Максимальные размеры вездеходного дистанционно-управляемого транспортного средства не ограничены. Чем они больше, тем больше проходимость и грузоподъемность.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕЗДЕХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО СО СМЕЩАЕМЫМ ЦЕНТРОМ ТЯЖЕСТИ | 2008 |
|
RU2381941C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО "ГРАВИХОД" | 2012 |
|
RU2486095C1 |
| МАЛОГАБАРИТНЫЙ ВСЕСЕЗОННЫЙ УНИВЕРСАЛЬНЫЙ ГУСЕНИЧНЫЙ ВЕЗДЕХОД | 2013 |
|
RU2534202C2 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| Амфибийная транспортно-технологическая платформа | 2017 |
|
RU2652476C1 |
| РОБОТИЗИРОВАННЫЙ ВЕЗДЕХОДНЫЙ КОМПЛЕКС ДЛЯ ХРАНЕНИЯ И ОТПУСКА ПРОДУКЦИИ | 2022 |
|
RU2787095C1 |
| МОБИЛЬНЫЙ ПРОЖЕКТОРНЫЙ КОМПЛЕКС "ГЕЛИОС" | 2008 |
|
RU2381116C1 |
| Грузовое устройство для перевозки жидких, твердых и/или сыпучих грузов | 2020 |
|
RU2742587C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННОГО ИМПУЛЬСНОГО ДЕЙСТВИЯ ИНЕРЦИОННЫХ СИЛ В ПОСЛЕДОВАТЕЛЬНОЕ ШАГОВОЕ ПЕРЕМЕЩЕНИЕ ГРУЗОВОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2013 |
|
RU2539446C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2004 |
|
RU2291063C2 |
Транспортное средство содержит корпус, выполненный в виде тела вращения, ось вращения которого параллельна поверхности перемещения, и приводной механизм, размещенный в корпусе и приспособленный под действием сигнала дистанционного управления перемещаться внутри корпуса, смещая центр тяжести транспортного средства и заставляя его перемещаться в направлении смещения центра тяжести. Корпус может быть выполнен в виде шара или цилиндра. В результате повышается устойчивость и проходимость транспортного средства. 2 с. и 3 з.п.ф-лы, 5 ил.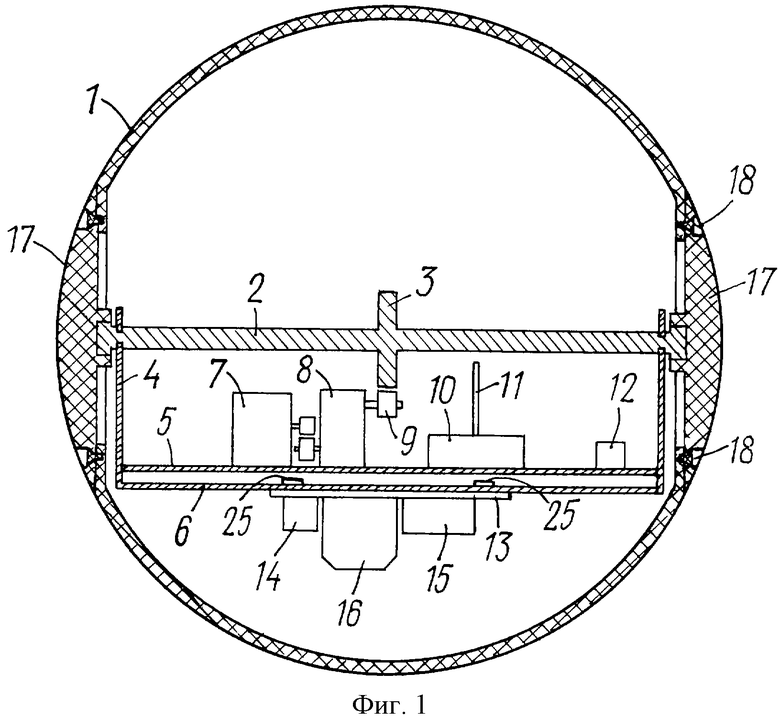
| 0 |
|
SU380517A1 | |
| ОДНОКОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1991 |
|
RU2051057C1 |
| ГЛИНОФОСФАТНЫЙ МАТЕРИАЛ | 2009 |
|
RU2403220C1 |
| US 3798835 А, 26.03.1974 | |||
| СПОСОБ КОНЦЕНТРИРОВАНИЯ РАДИОНУКЛИДОВ РАДИЯ ИЗ ВОДЫ | 2002 |
|
RU2215798C1 |
| Гидростатический люнет | 1978 |
|
SU666034A1 |
| US 1602295 A, 05.10.1926 | |||
| US 2977714 А, 04.04.1961. | |||

