Настоящее изобретение относится к области авиастроения, а именно к конструкциям многовинтовых летательных аппаратов с четырьмя несущими винтами, в частности к модульным конструкциям многоцелевых промышленных пилотных и/или беспилотных управляемых летательных аппаратов квадрокоптерного типа на топливной тяге многоцелевого назначения с грузоподъемностью более 600 кг, с возможностью вертикального взлета, посадки, зависания и совершения управляемых полетов и перемещения по воздуху с полезной нагрузкой свыше 250 кг.
Заявленная авторами конструкция квадрокоптера универсальна, использование данного летательного аппарата планируется преимущественно для доставки и перемещения грузов свыше 250 кг в условиях возможного применения. За счет того, что летательным аппаратам данного типа не требуется большой площади для взлета и посадки, использование таких аппаратов приобрело практическую необходимость для перемещения грузов и эвакуации людей при аварийно-спасательных операциях, в труднодоступных местах, в местах катастроф и стихийных бедствий, в строительстве, в сельском хозяйстве для проведения полевых исследований, посева, распыления пестицидов и инсектицидов, при лесовосстановительных работах путем сбрасывания семян, удобрений и питательных веществ на вырубленные земли, при доставке лекарств в труднодоступные районы и многом другом.
На рынке реализуется множество летательных аппаратов, каждый из которых имеет разные концепции дизайна, конечная цель которых является удовлетворение потребностей разных пользователей.
В настоящее время разными странами достаточно широко используются летательные аппараты квадрокоптерного типа, которые обладают очень хорошей маневренностью, гибкостью, легким вертикальным взлетом, посадкой и длительным зависанием.
Наиболее широкое применение получили квадрокоптеры, использующие электрические источники энергии.
Однако к существенным недостаткам электрических квадрокоптеров можно отнести малое время полета. Даже модели профессионального уровня способны находиться в воздухе лишь 30-40 мин. Дооснащение дополнительными более емкими аккумуляторами приводит к заметному увеличению массы летательного аппарата и существенно уменьшает вес полезной нагрузки, которую он может нести. В эксплуатации они не создают вредных выбросов, но в целом, аккумуляторная промышленность является источником загрязнения окружающей среды Pb, Ni, Cd, Sb и другими элементами, и их соединениями. Аккумуляторные заводы по интенсивности загрязнения воздушной среды производственных помещений этим токсичным металлом и риску возникновения профессиональных отравлений и связанными с ними заболеваниями, согласно данным ВОЗ, находятся на одном из первых мест, уступая лишь выплавке первичного и вторичного Pb, сварке и резке свинецсодержащих металлоконструкций, разборке судов на металлолом (Е.П. Янин, «Электротехническая промышленность и окружающая среда (эколого-геохимические аспекты)», М.: Диалог-МГУ, 1998, 281 с.).
Известны летательные аппараты квадрокоптерного типа на топливной тяге (бензиновые, керосиновые, водородные) и гибридные устройства задействования, использующие для подъемной тяги и совершения полетов в воздушном пространстве два или более источников энергии для питания своей двигательной установки, однако, грузоподъемность известных мультироторных систем оставляет желать лучшего. Они вполне годятся для перевозки только небольших грузов.
Из уровня техники известна конструкция привода несущих винтов многовинтового летательного аппарата по патенту на изобретение РФ №2732305 от 17.03.2020 «Квадрокоптер с гидравлическим приводом несущих винтов с фиксированным шагом лопастей». Сущность решения заключается в том, что квадрокоптер с гидравлическим приводом несущих винтов с фиксированным шагом лопастей содержит маршевый двигатель внутреннего сгорания, четыре несущих винта с фиксированным шагом лопастей и гидравлический привод несущего винта, передающий энергию от двигателя внутреннего сгорания к несущим винтам, содержащий гидравлический контур, в который входит гидронасос, подающий рабочую жидкость по напорной магистрали высокого давления на вход исполнительного гидромотора, выход из которого по сливной магистрали низкого давления связан со входом гидронасоса, гидравлический привод содержит два шестеренчатых гидронасоса, имеющих прямой привод без редукции от двигателя внутреннего сгорания, каждый из гидронасосов имеет два независимых входа и два независимых выхода, питает два исполнительных гидромотора, перед каждым входом гидронасоса в сливной магистрали низкого давления установлен регулятор расхода рабочей жидкости, насосы расположены по разные стороны относительно двигателя внутреннего сгорания, отношение производительности гидронасоса к производительности гидромотора находится в диапазоне от 1:1,5 до 1:3.
Недостатком данного квадрокоптера является повышенная масса летательного аппарата, обусловленная наличием элементов гидравлической системы (гидромоторы, регулируемые гидронасосы, гидромагистрали с рабочей жидкостью, редуктор, регулятор расхода жидкости), что снижает полезную массу летательного аппарата, снижает маневренность и его устойчивость полете, ухудшает балансировку летательного аппарата, негативно влияя на безопасность полета и маневренность, а также повышает требования к распределению массы полезного груза для обеспечения устойчивости аппарата в условиях полета. Существенный недостаток - большая инерционность роторов при маневрах связанная с необходимостью повышения и понижения оборотов роторов из-за отсутствия общего шага.
Известен мультикоптер с линейным расположением винтомоторных групп по патенту на изобретение RU 2577822 C2 от 02.07.2014. Отличительной особенностью аппарата является то, что электромоторы располагаются линиями, вытянутыми вдоль направления полета, для чего конструкция мультикоптера содержит платформу винтомоторных групп из продольных силовых балок - лонжеронов, расположенных вдоль полета, к лонжеронам крепятся поперечные силовые балки, на оконечностях которых устанавливаются электромоторы с несущими воздушными винтами, по одному на оконечностях каждой поперечной балки, снизу к платформе винтомоторных групп прикрепляется грузопассажирская кабина с пакетами аккумуляторов, при этом количество винтомоторных установок должно обеспечивать грузоподъемность мультикоптера в вариантах воздушного робота, воздушного мотоцикла, микроавтомобиля, грузотакси, автобуса, боевой машины пехоты и пр., но не менее 9 пар (18 винтомоторных групп) для надежности аварийной посадки при отказе до 4 электродвигателей одновременно.
Основным недостатком указанного мультикоптера является сложность технического исполнения, так как 18 винтомоторных групп располагаются на радиально расположенных силовых балках и потребляют энергию от 18 аккумуляторов (каждая группа от одного аккумулятора). Это усложняет конструкцию в целом, усложняет обеспечение надежности работы всех роторов одновременно, имеет значительные недостатки поперечной и продольной устойчивости управления аппарата и ограничивает возможности многоцелевого применения ЛА. Решение требует применения мощных и тяжелых аккумуляторных батарей. К тому же аккумуляторы плохо переносят минусовые температуры, требуют длительное время на подзарядку, обладают большим весом и габаритами. К упомянутым недостаткам можно отнести и то, что производство электрических аккумуляторов является достаточно затратным, аккумуляторы по истечении времени эксплуатации требуют замены и утилизации, что несомненно наносит значительный ущерб окружающей среде.
Известны решения гибридных летательных аппаратов, содержащих топливный двигатель и аккумуляторную батарею, например, бензоэлектрический гибридный четырехроторный беспилотный летательный аппарат по патенту на изобретение CN 103359284 А от 29.06.2013. Данный летательный аппарат, содержит корпус аппарата и соединенную с корпусом аппарата раму, при этом рама представляет собой поперечную конструкцию, образованную четырьмя одинаковыми элементами, состыкованными встык по принципу «два на два», в концевой части каждого элемента аппарата расположена группа электросиловых агрегатов, включающая четыре ротора с лопастями, корпус аппарата содержит верхнюю центральную пластину, нижнюю центральную пластину с закрепленным на ней бензиновым двигателем и генератором, систему управления и блок генерации энергии, верхняя центральная пластина закреплена над центром поперечной рамы, нижняя центральная пластина закреплена ниже центра поперечной рамы, система управления расположена над верхней центральной плитой, электрически соединена с электросиловыми агрегатами и используется для управления и приведения в действие электросиловых агрегатов, энергоблок закреплен под нижней центральной пластиной, электрически связан с системой управления и служит для подачи питания в систему управления, рама снабжена посадочным устройством.
Работа винтов данного типа гибридного летательного аппарата осуществляется от аккумуляторной батареи при неработающем топливном двигателе, когда же мощность аккумулятора становится ниже заданной, например, 60%, запускается двигатель, который используется только для подзарядки аккумулятора за счет работы генератора.
Известен мультикоптер с гибридной силовой установкой, содержащий шасси, на котором установлена винтомоторная группа (ВМГ) с двигателем внутреннего сгорания (ДВС) и, по меньшей мере, четыре винтомоторные группы с электрическими двигателями, работа которого подробно описана в патенте на изобретение RU 2803214 C1 от 12.08.2022. Мультикоптер содержит компьютер, входящий в состав бортового навигационно-пилотажного комплекса, источник электропитания - аккумуляторные батареи (АКБ), генератор, соединенный с ДВС и зарядным устройством источника питания - АКБ.
Недостатками описанного решения помимо того, что описана только концепция, исключающая детальное описание конструктивных элементов, еще и то, что данное решение является сложным, имеет ограниченные возможности наращивания грузоподъемности и не обладает надежностью. За счет наличия автомата перекоса, увеличивается сложность управления системами мультикоптера.
Известно решение несущей рамы складной конструкции для привязного/автономного беспилотного летательного аппарата на базе квадрокоптера по патенту РФ на полезную модель RU 186777 U1 от 23.05.2018, содержащее горизонтальные лопастные движители с бесколлекторными двигателями, прямоугольную раму складной конструкции из композиционных материалов, установленную с возможностью крепления к ней различных типов полезной нагрузки, в конструкции рамы применены композиционные стержни, имеющие внешнюю форму сечения в виде квадрата, а внутреннюю форму сечения в виде кольца, причем стержни скреплены с возможностью установки в них проводки, также применены демпфирующие втулки, установленные в средней части рамы, удерживающие полезную нагрузку и источник питания, при этом, по меньшей мере, два стержня соединены между собой с помощью шарнирного узла, а в нижней части рамы установлены убирающиеся ножки.
К недостаткам конструкции можно отнести узость решаемых задач, и его малая грузоподъемность.
Известен складной квадрокоптер по патенту на изобретение RU 2665123 C2 от 23.01.2017. Квадрокоптер имеет корпус квадратовидной формы, состоящий из двух параллельных пластин, между которыми втулками на осях установлены внутренние концы четырех лучей - держателей винтов с двигателями. Внешние концы лучей с винтами размещены по углам квадрата вокруг корпуса, причем крепление лучей с корпусом выполнено с возможностью их сложения для хранения и переноски. Лучи квадрокоптера в положении хранения и транспортировки сложены в горизонтальной плоскости, для чего втулки внутренних концов лучей выполнены вертикально. Лучи надеты втулками на вертикальные оси, установленные между пластинами корпуса вблизи его центра. Две пары вертикальных осей размещены на пластинах корпуса симметрично относительно продольной оси корпуса. На всех четырех углах обеих пластин корпуса установлены выступы, перед внешними концами которых установлены стопоры с резьбой.
Данное решение квадрокоптера относится к области малогабаритных беспилотных авиационных устройств вертикального взлета и посадки и предназначен для аэрофотографирования и воздушного наблюдения с возможностью передачи информации. Изобретение описывает решение задачи повышения прочности скрепления лучей квадрокоптера с его корпусом и их фиксации в рабочее положение и их сложения в нерабочее положение, а также повышение компактности квадрокоптера в нерабочем положении. Данное решение не способно решать задачи промышленно применяемых квадрокоптеров.
Из уровня техники известны решения квадрокоптеров, задачами которых является возможность программирования автономного полета квадрокоптера, например, изобретение на обучающий программируемый квадрокоптер по патенту RU 2798299 C1 от 23.01.2023. Данные решения не входят в объем притязаний заявителя.
Основным недостатком, присущим всем вышеописанным летательным аппаратам квадрокоптерного типа является отсутствие возможности перемещения тяжелых грузов.
Отмеченные вышеуказанные недостатки устранены в более совершенном многовинтовом грузовом беспилотном летательном аппарате по патенту на полезную модель RU 222735 U1 от 19.07.2023, который по технической сущности и числу совпадающих признаков выбран в качестве наиболее близкого аналога предложенному летательному аппарату.
Многовинтовой грузовой беспилотный летательный аппарат содержит корпус, полозья, складываемые консоли, емкости полезной нагрузки, двигатель внутреннего сгорания, редуктор, топливный бак, несущие винты переменного в полете шага, механический привод несущих винтов, систему управления и механизмы изменения шага несущих винтов. Особенностью летательного аппарата является то, что каждый механизм изменения шага несущих винтов снабжен шаговым электродвигателем, на выходном валу которого установлен кривошип, соединенный посредством нижнего штифта и нижнего бронзового подшипника скольжения с толкающим штоком, проходящим соосно через полый вал, соединенный с несущим винтом, при этом на толкающем штоке установлено коромысло, соединенное с помощью двух верхних штифтов с обжимными обоймами, в каждой из которых установлена одна лопасть несущего винта, а каждая обжимная обойма, в свою очередь, закреплена в верхнем бронзовом подшипнике скольжения внутри ступицы несущего винта, механический привод несущих винтов обеспечивается ременной передачей.
К существенным недостаткам описанного летательного аппарата можно отнести следующие:
- квадрокоптер относится только к беспилотным летательным аппаратам;
- конструкция квадрокоптера имеет большой вес (около 1000 кг) и габариты, корпус является закрытым, тяжелым и плохо управляемым в полете, и, как следствие, не обладает должными маневренными и тяговыми параметрами, а также имеет низкие показатели по надежности и живучести;
- изготовление и доведение всех составных элементов квадрокоптера до рабочего состояния является сложным, затратным, занимающий достаточно длительный процесс по времени;
- механизм изменения шага несущих винтов имеет усложненную конструкцию;
- схема привода несущих винтов, при которой распределение ременных приводов, состоящих из зубчатых ремней разной длины осуществляется на разных уровнях в горизонтальной плоскости, негативно сказывается на развесовку всей конструкции и стабилизацию квадрокоптера в режиме полета, а также увеличивает номенклатуру составляющих деталей, стоимость и существенно влияет на операции при обслуживании и ремонте;
- отсутствие угла конусности лопастей увеличивает трение в бронзовых подшипниках и уменьшает ресурс используемых лопастей;
- имеет несовершенный редуктор;
- невозможность аппарата находится в рабочем состоянии при отказе мотора в виду конструктивного отсутствия режима авторотации.
Время полета, предлагаемого нами квадрокоптера в соответствии с настоящим изобретением, может достигать более 8 часов (в зависимости от поставленных задач), общая конструкция проста, легко управляема, компактна и не обременена сложностями при ее сборке, что благоприятно влияет на потребительские свойства такого продукта и способствует широкой популяризации.
Технической задачей, на решение которой направлено настоящее изобретение, является расширение технологических и функциональных возможностей летательных аппаратов квадрокоптерного типа, при котором решением является создание универсального многофункционального пилотного и/или беспилотного управляемого летательного аппарата квадрокоптерного типа модульной конструкции на топливной тяге многоцелевого назначения со взлетной массой 600 и более кг, с возможностью вертикального взлета, посадки, зависания и совершения управляемых полетов и перемещения по воздуху с полезной нагрузкой свыше 250 кг, обладающего максимальной портативностью, а также компоновкой промышленно производимых деталей аппарата при облегченной сборке конструкции без применения дорогостоящих решений и технологий.
Требуемый технический результат, достигается тем, что универсальный многофункциональный летательный аппарат (далее - УМЛА, ЛА) квадрокоптерного типа содержит корпус, консоли, роторы с несущими винтами, двигатель внутреннего сгорания, редуктор, соединенный с двигателем внутреннего сгорания посредством жесткой связи, штатное оборудование двигателя внутреннего сгорания, четыре несущих винта с лопастями, механический привод несущих винтов, механизм изменения шага несущих винтов, комбинированную аппаратуру системы управления летательного аппарата и выполнения полетного задания, грузовую платформу, шасси.
Особенностью предложенного технического решения в качестве изобретения является то, что корпус универсального многофункционального летательного аппарата выполнен в виде пространственной рамы, состоящей из профильных труб, собираемых с помощью болтовых соединений, представляющей собой ферменную конструкцию прямоугольной формы, которая включает верхний и нижний силовые пояса, между которыми образована центральная часть пространственного объема конструкции ЛА.
Верхний силовой пояс включает распределяющий редуктор, имеющий корпус, внутри которого расположены пять шестерен, одна малая ведущая шестерня, приводимая во вращение карданным валом ДВС, и две пары больших ведомых шестерен, одна пара из которых приводится во вращение малой ведущей шестерней, а другая пара приводится во вращение от упомянутой пары ведомых шестерен, сверху распределяющего редуктора на одном уровне в горизонтальной плоскости выведены четыре шкива приводных ремней, которые жестко закреплены с большими ведомыми шестернями распределяющего редуктора на своих валах, к корпусу распределяющего редуктора под углами 90° с помощью болтовых соединений крепятся четыре консоли, каждая из которых содержит привод с зубчатым ремнем, ротор с двумя прямоугольными металлическими лопастями и систему управления изменения шага лопастей, каждая прямоугольная металлическая лопасть изготовлена экструзионным способом и имеет отрицательную крутку, каждая консоль на своем конце имеет вилку с возможностью линейного перемещения для регулирования натяжения зубчатого ремня, в которой на валу содержится ведомый шкив привода ротора, вращение ротора обеспечивается за счет двух подшипников, установленных в оконечностях верхней и нижней части вилки, верхняя часть вала системы управления изменения шага лопастей между ротором и вилкой включает скользящий подшипниковый узел, соединенный посредством двух тяг с металлическими лопастями ротора для изменения угла атаки общего шага лопастей, подшипниковый узел закрыт от внешних воздействий гофрой (например, из резины) и в своем основании соединен с тягой привода изменения общего шага лопастей, приводимый в действие сервоприводом посредством рычага, задействуя угловой рычаг, центральная часть каждой консоли имеет, по меньшей мере, один механизм устранения вибраций и частичного натяжения зубчатого ремня, состоящий из двух рычагов, на концах которых расположены подшипниковые ролики с буртиками по ширине зубчатого ремня, ролики рычагов расположены зеркально с внешних сторон зубчатого ремня и стянуты друг с другом спиральными пружинами, другие концы рычагов закреплены на консоли общим болтом, обеспечивая их подвижность.
Все консоли по периметру соединены между собой силовыми тросами.
Нижний силовой пояс, выполняющий функцию грузовой площадки, содержит квадратную раму продуваемой конструкции из профильных труб, по углам в нижней части рамы установлены самоцентрирующиеся колеса с амортизирующими элементами.
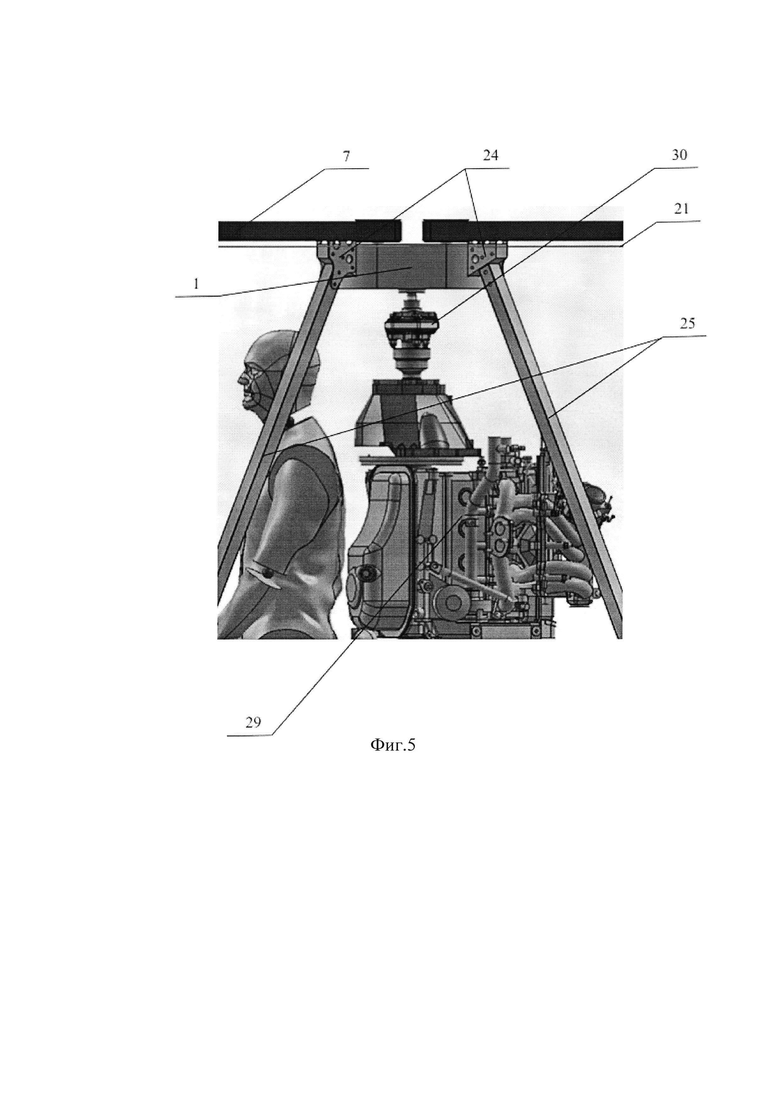
Каждый угол квадратной рамы нижнего силового пояса соединен с верхним силовым поясом посредством двух подкосов в виде профильных труб, закрепленных одними своими концами в каждом углу нижнего силового пояса, а другими концами - к узлам крепления на корпусе распределяющего редуктора и к узлам крепления вилок, образуя продуваемые треугольные соединения, в центральной части пространственного объема конструкции летательного аппарата размещено место пилота и/или дополнительного груза, сзади которого смонтирован ДВС с вертикальной установкой и сухим картером, причем на карданном валу ДВС установлена обгонная муфта, позволяющая использовать режим авторотации в случае отказа ДВС для относительно безопасной посадки летательного аппарата.
Каждая прямоугольная металлическая лопасть включает два шариковых подшипника и один игольчатый подшипник.
Каждая вилка является отдельным вставным элементом поверх конечной части консоли с возможностью линейного перемещения вилки с помощью резьбового болта, обеспечивая натяжение зубчатого ремня.
Сущность предложенного технического решения в качестве изобретения поясняется следующими изображениями:
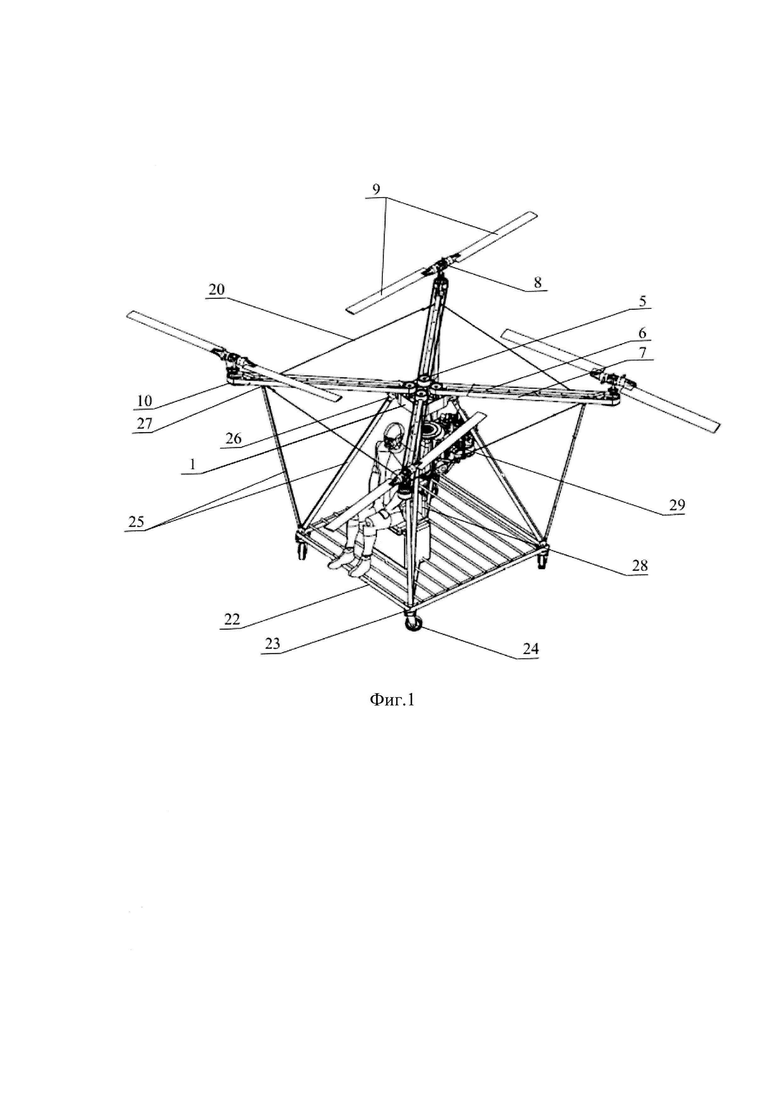
- Фиг. 1 Вид универсального многофункционального летательного аппарата квадрокоптерного типа в рабочем состоянии;
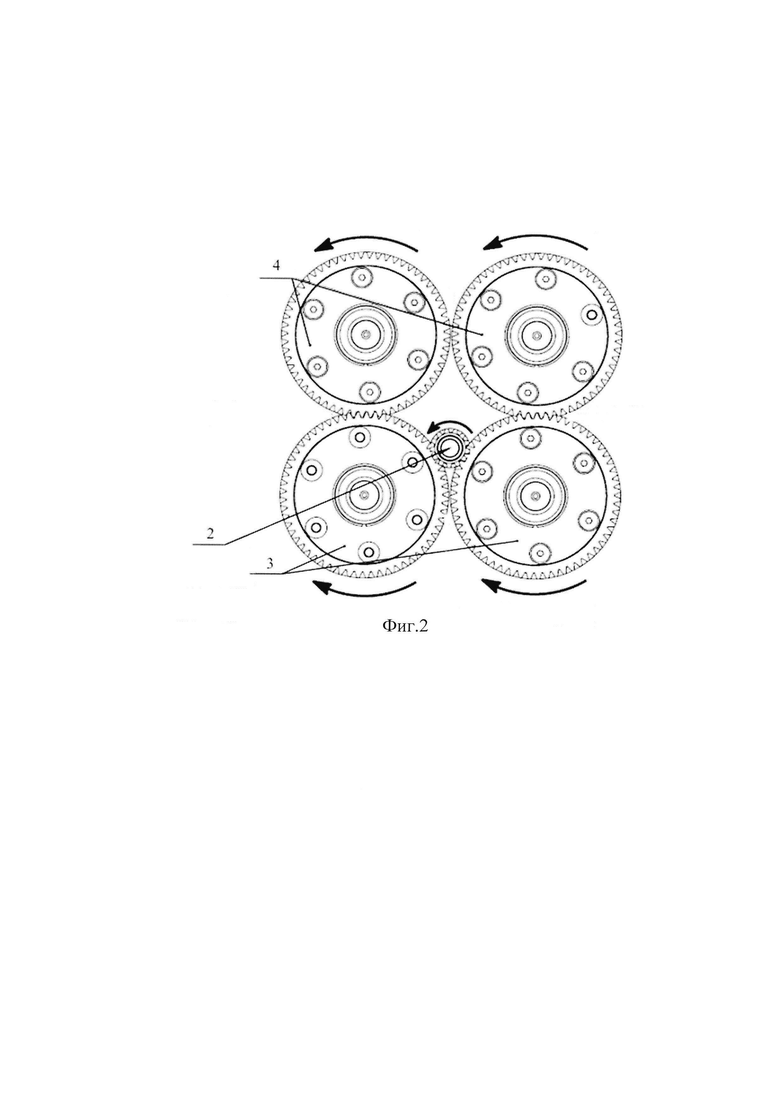
- Фиг. 2 Работа шестерен распределяющего редуктора;
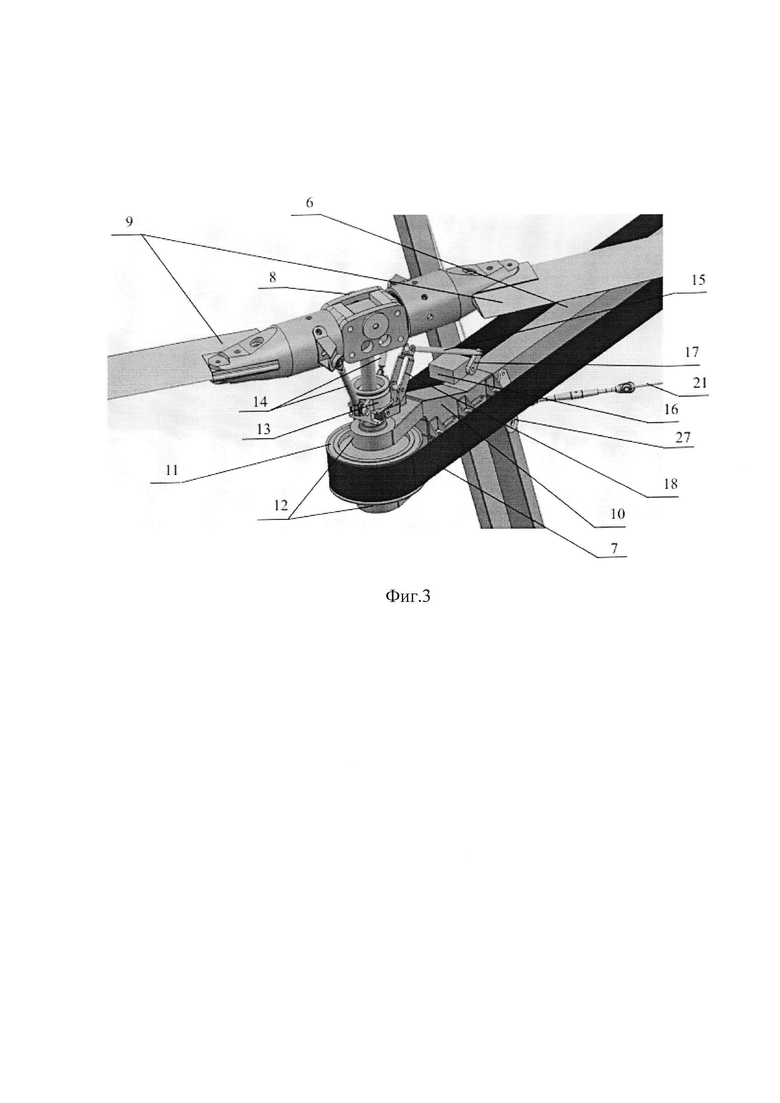
- Фиг. 3 Механический привод с зубчатым ремнем на конце консоли и ротор с лопастями в рабочем состоянии;
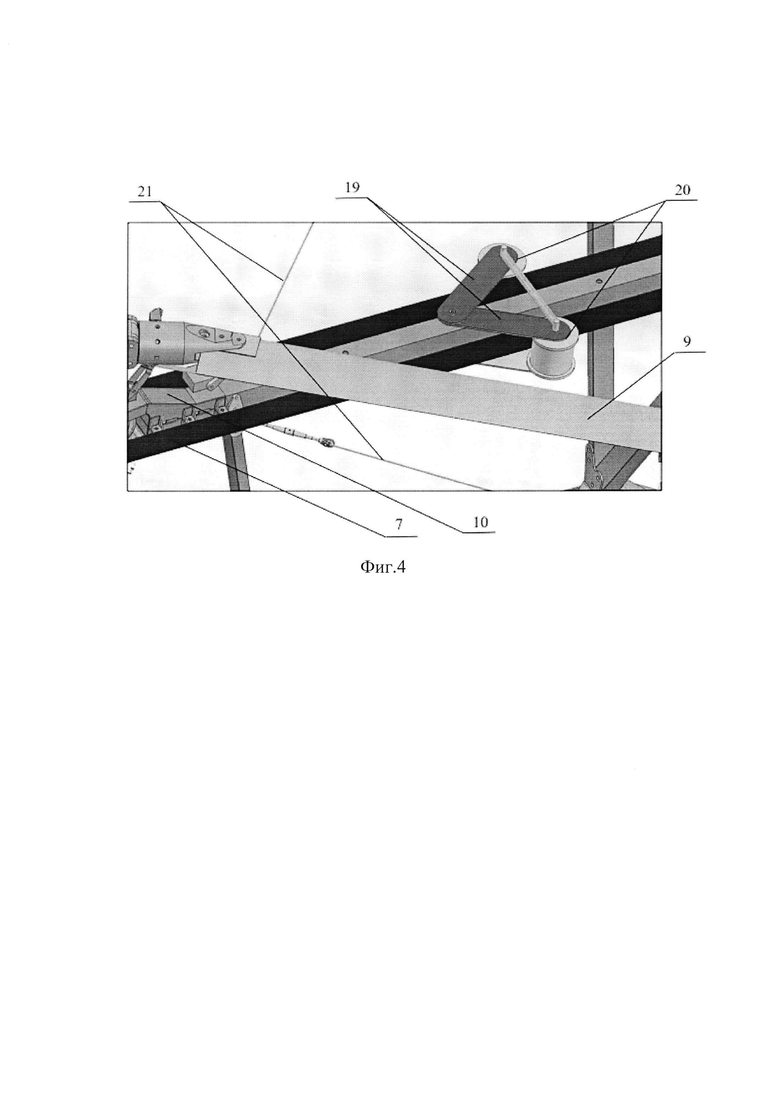
- Фиг. 4 Механизм устранения вибраций и частичного натяжения зубчатого ремня;
- Фиг. 5 Центральная часть пространственного объема конструкции летательного аппарата.
Универсальный многофункциональный летательный аппарат квадрокоптерного типа содержащий корпус, консоли, роторы с несущими винтами, двигатель внутреннего сгорания, редуктор, соединенный с двигателем внутреннего сгорания посредством жесткой связи, штатное оборудование двигателя внутреннего сгорания, четыре несущих винта с лопастями, механический привод несущих винтов, механизм изменения шага несущих винтов, комбинированную аппаратуру системы управления летательного аппарата и выполнения полетного задания, грузовую платформу, шасси.
Техническое решение характеризуется тем, что корпус универсального многофункционального летательного аппарата выполнен в виде пространственной рамы, состоящей из профильных труб, собираемых с помощью болтовых соединений, представляющей собой ферменную конструкцию прямоугольной формы, которая включает верхний и нижний силовые пояса, между которыми образована центральная часть пространственного объема конструкции летательного аппарата, верхний силовой пояс включает распределяющий редуктор (1), имеющий корпус, внутри которого расположены пять шестерен, одна малая ведущая шестерня (2), приводимая во вращение карданным валом ДВС, и две пары (3, 4) больших ведомых шестерен, одна пара (3) из которых приводится во вращение малой ведущей шестерней (2), а другая пара (4) приводится во вращение от упомянутой пары (3) ведомых шестерен, сверху распределяющего редуктора (1) на одном уровне в горизонтальной плоскости выведены четыре шкива приводных ремней (5), которые жестко закреплены с большими ведомыми шестернями распределяющего редуктора (1) на своих валах, к корпусу распределяющего редуктора (1) под углами 90° с помощью болтовых соединений крепятся четыре консоли (6), каждая из которых содержит привод с зубчатым ремнем (7), ротор (8) с двумя прямоугольными металлическими лопастями (9) и систему управления изменения шага лопастей, каждая прямоугольная металлическая лопасть (9) изготовлена экструзионным способом и имеет отрицательную крутку, каждая консоль на своем конце имеет вилку (10) с возможностью линейного перемещения для регулирования натяжения зубчатого ремня (7), в которой на валу содержится ведомый шкив (11) привода ротора, вращение ротора обеспечивается за счет двух подшипников (12), установленных в оконечностях верхней и нижней части вилки, верхняя часть вала системы управления изменения шага лопастей между ротором (8) и вилкой (10) включает скользящий подшипниковый узел (13), соединенный посредством двух тяг (14) с металлическими лопастями (9) ротора (8) для изменения угла атаки общего шага лопастей, подшипниковый узел (13) закрыт от внешних воздействий гофрой и в своем основании соединен с тягой (15) привода изменения общего шага лопастей, приводимый в действие сервоприводом (16) посредством рычага (17), задействуя угловой рычаг (18), центральная часть каждой консоли имеет, по меньшей мере, один механизм устранения вибраций и частичного натяжения зубчатого ремня (7), состоящий из двух рычагов (19), на концах которых расположены подшипниковые ролики (20) с буртиками по ширине зубчатого ремня (7), ролики (20) рычагов (19) расположены зеркально с внешних сторон зубчатого ремня (7) и стянуты друг с другом спиральными пружинами, другие концы рычагов (19) закреплены на консоли (6) общим болтом, обеспечивая их подвижность, все консоли (6) по периметру соединены между собой силовыми тросами (21), нижний силовой пояс, выполняющий функцию грузовой площадки, содержит квадратную раму (22) продуваемой конструкции из профильных труб, по углам (23) в нижней части рамы установлены самоцентрирующиеся колеса (24) с амортизирующими элементами, каждый угол (23) квадратной рамы (22) нижнего силового пояса соединен с верхним силовым поясом посредством двух подкосов (25) в виде профильных труб, закрепленных одними своими концами в каждом углу (23) нижнего силового пояса, а другими концами - к узлам (26) крепления на корпусе распределяющего редуктора (1) и к узлам (27) крепления вилок (10), образуя продуваемые треугольные соединения, в центральной части пространственного объема конструкции летательного аппарата размещено место пилота (28) и/или дополнительного груза (28), сзади которого смонтирован ДВС (29) с вертикальной установкой и сухим картером, причем на карданном валу ДВС (29) установлена обгонная муфта (30), позволяющая использовать режим авторотации в случае отказа ДВС (29) для относительно безопасной посадки летательного аппарата.
Каждая прямоугольная металлическая лопасть (9) включает два шариковых подшипника и один игольчатый подшипник.
Каждая вилка (10) является отдельным вставным элементом поверх конечной части консоли (6) с возможностью линейного перемещения вилки (10) с помощью резьбового болта, обеспечивая натяжение зубчатого ремня (7).
Работа универсального многофункционального летательного аппарата квадрокоптерного типа осуществляется следующим образом.
Система управления полетом УМЛА содержит комплект аппаратуры электронной системы управления, которая может быть использована от разных производителей под разными известными брендами для любого квадрокоптера заводского изготовления.
С помощью встроенного программного обеспечения контроллера, по командам управляющих сигналов, УМЛА может самостоятельно удерживать заданные координаты, компенсировать влияние ветра, связываться посредством пульта радиоуправления посредством разных каналов сигналов, проделывать различные виражи. Управление ЛА производится с помощью пульта или специальной программы для смартфона.
Базовый контроллер включает в себя:
- главный процессор, который обеспечивает обработку команд, поступающих от оператора;
- гироскопический датчик, который отвечает за ориентацию и определение устройства в пространстве;
- альтиметр, который определяет высоту аппарата относительно поверхности;
- акселерометр, датчик, отвечающий за положение агрегата в плоскостях X, Y, Z;
- компас;
- Wi-Fi;
- ОЗУ.
Промышленно производимые квадрокоптеры в большинстве своем имеют схожее техническое оснащение и комплектацию с современными гаджетами, которые активно используют в своей работе возможности интернета.
По функционалу современные смартфоны и авиамодели очень схожи, т.к. в них имеются следующие общие компоненты системы:
- GPS и/или ГЛОНАС;
- Wi-Fi;
- общие датчики.
Датчики устанавливаются на УМЛА в любом удобном месте с учетом направления полета летательного аппарата.
Благодаря датчикам ЛА может достаточно долго находиться в воздухе и самостоятельно ориентироваться по высоте, вектору движения и прочим важным процессам. Популярность устройства в современном высокотехнологичном мире очевидна и бесспорна.
Посадка также корректируется и полностью зависит от используемых датчиков, которые отвечают за такие параметры, как:
- направление в полете;
- скорость;
- высота;
- зависание;
- посадка.
Аппаратура системы управления полетом УМЛА включает пульт радиоуправления и приемник.
Управление УМЛА осуществляется дистанционно, при помощи пульта, на котором расположены два джойстика и стика.
После включения пульта управления и ручного воздействия на стики управления пульта движения каждого стика передаются квадрокоптеру в цифровом закодированном значении. Квадрокоптер принимает их с помощью приемника, а приемник в свою очередь отправляет данные в полетный контроллер ЛА, который уже обрабатывает все данные и отдает команды на исполнительные элементы.
Заявителем использован в качестве радиопередатчика пульт с многопротокольным модулем, который включает механизмы стиков на подшипниках, сенсорный экран, ролика для навигации по меню, датчика Холла и пр. Питание радиопередатчика осуществляется от перезаряжаемых аккумуляторов или батареек типа «АА». Такой пульт может подключаться к огромному количеству различных приемников разных брендов, необходимо только в настройках выбрать наименование бренда и тип приемника. В УМЛА использован Jumper T-Lite.
Дистанционный пульт радиоуправления и приемник должны быть совместимы друг с другом по протоколам взаимодействия.
Технологии протоколов, которые могут использоваться в авиамоделях постоянно совершенствуются сейчас стала появляться аппаратура с встроенным многопротокольным модулем, например, JP4IN1 (многопротокольный) (бренды Flysky, Hubsan, AFFIDS2A, А7105: и другие). Дистанционный пульт управления с таким модулем может подключаться практически к любой авиамодели.
Радиоприемник оснащен RF модулем (многопротокольный модуль под все известные бренды, позволяющие использовать частоты 1.3GHz, 900MHz и 433MHz) с двумя длинными антеннами с поддержкой SERIAL протоколов, такие как "SBUS", "SRXL" и "IBUS". С такими протоколами не доставляет большого труда выполнить соединение с полетным контроллером.
В Системе управления полетом УМЛА использован комплект аппаратуры электронной системы управления Flysky FS-i6x AFHDS 2А RC с приемником Х6 В IA10B, 10 каналов, 2,4 ГГц.
Системы управления FlySky производят и продают всем известную качественную и безотказную аппаратуру управления ЛА Taranis с множеством функций и каналов. Электроника собрана из доступных качественных компонентов, которые выводят мощность передатчика на высокий уровень и отлично подходит для модернизации с помощью RF-модулей.
В сущности, управление стандартным небольшим квадрокоптером масштабируется в управление УМЛА.
Пульт радиоуправления может находится в руках пилота, сидящего в квадрокоптере, или находящегося на земле. Дистанция управления ограничивается только возможностями аппаратуры системы управления квадрокоптером. Если использовать спутниковую связь и навигацию с видеоконтролем, то дистанция ограничена только возможностью времени полета УМЛА по топливу (около 8-ми часов, в зависимости от полного взлетного веса). Для запуска ДВС (29) используются штатная команда стандартного квадрокоптера на начало вращения винтов, преобразованная на сигнал включение зажигания ДВС (29) и стартера. После прогрева ДВС (29) от контроллера системы управления полетом УМЛА поступает команда на систему плавного включения штатного сцепления ДВС (29), и вся трансмиссия вместе с распределительным редуктором (1) и лопастями (9) роторов (8) приводится в рабочее состояние. После того, как ДВС (29) набрал ~5 тыс.оборотов, фиксированное (постоянное) поддержание оборотов в полете обеспечивается электронной системой штатного оборудования ДВС (29) (электронный блок управления ДВС). После приземления квадрокоптера формируется команда на выключение ДВС (29) и остановку роторов (8).
Навыки, полученные в управлении любым небольшим квадрокоптером, практически ничем не отличаются от управления УМЛА.
От оператора с пульта радиоуправления поступает команда в приемник системы управления полетом УМЛА на включение летательного аппарата. Система управления полетом УМЛА осуществляет подачу электропитания на подсистемы летательного аппарата и проводит их предполетную подготовку. После получения полетного задания и команды на старт от пилота (оператора) система управления полетом УМЛА производит запуск ДВС (29), выводит его на рабочие обороты с помощью электронного блока управления ДВС. Крутящий момент от ДВС (29) передается после включения штатного сцепления на распределяющий редуктор (1) и от него, посредством зубчатых ремней (7), на роторы (8) несущих лопастей (9). Набрав требуемую частоту вращения всех роторов (8), УМЛА взлетает на заданную высоту и в соответствии с полетным заданием начинает совершать заданные маневры. При полете постоянно задействованы все штатные системы стабилизации и управления полетом, для этих действий задействованы все сервоприводы УМЛА (сервомеханизмы управления общим шагом всех четырех роторов). Принцип работы механизма изменения шага несущих роторов (8) заключается в следующем:
По команде системы управления полетом УМЛА сервопривод (16) толкает рычаг (17), который приводит в действие скользящий подшипниковый узел (13), и посредством тяг (14), идущим к лопастям (9), приводят их во вращение, чем изменяют угол атаки общего шага.
При этом ДВС (29) поддерживает частоту вала на одном уровне. При увеличении или уменьшении угла установки лопастей (9) роторов (8) увеличивается или уменьшается шаг несущего винта.
При поддержании фиксированных оборотов роторов УМЛА производит полет, изменяет свое пространственное положение в соответствии с полученными командами от системы управления на управление дифференцированно, общим шагом лопастей несущих роторов. Для совершения посадки по команде пилота (оператора), система управления полетом УМЛА формирует команду на посадку ЛА, при этом лопастям (9) роторов (8) придается оптимальное значение углов установки, все несущие роторы (8) вращаются с одной частотой вращения, вследствие чего производится плавное снижение высоты, вплоть до посадки. После чего оператором подается команда на выключение ДВС (29).
Предложенная конструкция летательного аппарата позволяет достигнуть заявленного технического результата применительно к многофункциональным летательным аппаратам квадрокоптерного типа массой 600 кг и более с полезной нагрузкой свыше 250 кг.
Лопасти винтов с переменным шагом, вращающиеся с фиксированной скоростью, имеют преимущества, заключающиеся в уменьшении сложности конструкции трансмиссии, когда один двигатель используется для приведения в действие всех воздушных винтов с одинаковой скоростью вращения.
Применение алюминиевых винтов, изготовленных экструзионным способом и выполненных с отрицательной круткой дает возможность увеличить КПД несущей системы, что позволяет значительно снизить расход топлива и обеспечить облегчить управление аппаратом. В результате это позволяет значительно увеличить грузоподъемность и дальность полета. Применение экструзионных лопастей значительно уменьшает стоимость.
Работа винтов создает аэродинамическую подъемную силу, с помощью изменения общего шага винтов, что способствует летательному аппарату достигать полета с высокой степенью маневренности и заметной эффективностью.
Конструктивная схема летательного аппарата спроектирована таким образом, что центр масс аппарата практически совпадает с центром пространственной рамы, тем самым обеспечивается хорошее распределение массы и в то же время обеспечивает пилоту хороший обзор вперед, необходимый при медленном полете и точное маневрирование, а также безопасному полету при сильной турбулентности.
Механизм изменения шага несущих винтов имеет малое количество деталей, относительную простоту сборки, что повышает надежность летательного аппарата в целом.
Система управления квадрокоптером может быть полуавтоматической или автоматической (с пилотом на борту, или пилотом на земле). Рационально выбирая рабочий режим топливного двигателя, можно максимизировать общую экономию топлива квадрокоптера при одновременном снижении выбросов загрязняющих веществ.
Предложенный способ привода позволяет избежать традиционного топливного риска, связанного с внезапным выключением двигателя в полете. После выключения топливного двигателя, за счет использования обгонной муфты (30), аппарат в режиме авторотации может быть управляем для безопасной посадки.
Полая конструкция пространственной рамы ЛА позволяет разместить внутри ее элементы проводных и стыковочных элементов, избегая наружных крепежей. Следовательно, снаружи всей машины нет провода, все просто и безопасно.
Команды полетного задания передаются с помощью дистанционного радиопульта, в систему управления полетом УМЛА, которые, в свою очередь, управляют тягой, создаваемой воздушными винтами. Контроллер системы управления полетом УМЛА включает в себя процессор и модули инерциальных измерений, соответственно соединенные с процессором и модуль приемопередатчика данных.
Особое программное управление лопастями позволяет разворачивать ЛА, менять курс, менять скорость и высоту. Комплект аппаратуры электронной системы управления позволяет данному летательному аппарату выполнять полет по программе, а также управлять автопилотом вручную как с земли, так и с борта этого летательного аппарата.
Описанные конструктивные элементы заявленного технического решения позволяют значительно облегчить сборку и продлить сроки использования, заявленного квадрокоптера.
Предлагаемое техническое решение лишено всех вышеуказанных недостатков аналогов, присущим известным летательным аппаратам данного вида и характеризует его в качестве незаменимого средства в условиях применения средними и малыми предприятиями и в личном хозяйстве.
Приведенный выше пример является только вариантом конструктивного исполнения ЛА для ясного понимания, и не ограничивается вариантами осуществления изобретения. Для специалистов в данной области техники на основании приведенного выше описания также могут быть сделаны другие типы изменений или дополнений. Нет необходимости исчерпывающе перечислять все реализации. Очевидные изменения или изменения, вытекающие из этого, находятся в пределах объема защиты настоящего изобретения.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим информационным источникам, и выявление по открытым источникам, содержащих сведения об аналогах предложенного заявителем летательного аппарата квадрокоптерного типа, позволил установить, что заявитель не обнаружил источник, характеризующийся признаками, тождественными существенным признакам заявленного изобретения. Определение из перечня выявленных аналогов, включая прототип, позволил установить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков в заявленном техническом решении, изложенных в формуле изобретения, что говорит о соответствии описанного универсального многофункционального летательного аппарата квадрокоптерного типа «новизна».
Для проверки соответствия заявленного изобретения условию «изобретательский уровень» заявитель провел дополнительный поиск известных решений, чтобы выявить признаки, совпадающие с отличительными от прототипа признаками заявленного устройства. Результаты поиска показали, что заявленное изобретение не вытекает для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками заявленного изобретения преобразований для достижения технического результата. Описываемое изобретение не основано на изменении количественного признака (признаков), представлении таких признаков во взаимосвязи либо изменении его вида. Имеется в виду случай, когда известен факт влияния каждого из указанных признаков на технический результат, и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, закономерностей. Следовательно, заявленное изобретение соответствует условию «изобретательский уровень».
Вышеуказанные описанные заявителем сведения, подтверждающие возможность осуществления изобретения с получением вышеуказанного технического результата, раскрывают его с максимальной полнотой, достаточной для его осуществления. Таким образом, изложенные сведения свидетельствуют о выполнении при использовании заявленного устройства в том виде, как оно охарактеризовано в независимом пункте изложенной формулы изобретения, и подтверждена возможность его осуществления с помощью описанных в заявке известных до даты приоритета средств и методов. Следовательно, заявленное изобретение соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2018 |
|
RU2706130C2 |
| Автожир | 2018 |
|
RU2673933C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| Многоосный летательный аппарат с вертикальным взлетом, посадкой и способ управления им | 2021 |
|
RU2768085C1 |
| ВИНТОКРЫЛ | 2012 |
|
RU2500578C1 |
| ВИНТОМОТОРНАЯ УСТАНОВКА ДЛЯ МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2633824C1 |
| Способ накопления и стабилизации вырабатываемого напряжения бесколлекторным генератором в составе гибридной силовой установки | 2018 |
|
RU2708118C1 |
| Способ защиты наземных объектов от самонаводящихся на инфракрасное излучение высокоточных боеприпасов | 2018 |
|
RU2682144C1 |
| Автомат перекоса однороторного летательного аппарата и способ его работы | 2020 |
|
RU2740039C1 |
| МНОГОВИНТОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2693616C2 |
Изобретение относится к области авиации, в частности к конструкциям многовинтовых летательных аппаратов. Универсальный многофункциональный летательный аппарат квадрокоптерного типа содержит корпус, включающий верхний и нижний силовые пояса, между которыми образована центральная часть конструкции летательного аппарата. Верхний силовой пояс включает распределяющий редуктор, имеющий корпус, внутри которого расположены пять шестерен. Сверху распределяющего редуктора на одном уровне в горизонтальной плоскости выведены четыре шкива приводных ремней. К корпусу распределяющего редуктора крепятся четыре консоли, каждая из которых содержит привод с зубчатым ремнем, ротор с двумя прямоугольными металлическими лопастями и систему управления изменения шага лопастей. Каждая консоль на своем конце имеет вилку с возможностью линейного перемещения для регулирования натяжения зубчатого ремня. В центральной части пространственного объема конструкции аппарата размещено место пилота и/или дополнительного груза, сзади которого смонтирован ДВС. Обеспечивается расширение технологических и функциональных возможностей летательных аппаратов квадрокоптерного типа. 2 з.п. ф-лы, 5 ил.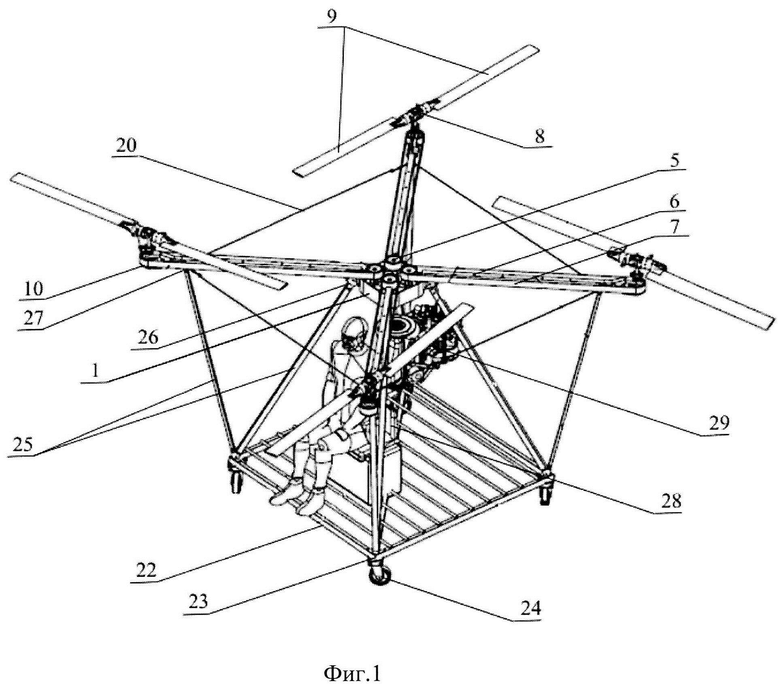
1. Универсальный многофункциональный летательный аппарат квадрокоптерного типа, содержащий корпус, консоли, роторы с несущими винтами, двигатель внутреннего сгорания (ДВС), редуктор, соединенный с двигателем внутреннего сгорания посредством жесткой связи, штатное оборудование двигателя внутреннего сгорания, четыре несущих винта с лопастями, механический привод несущих винтов, механизм изменения шага несущих винтов, комбинированную аппаратуру системы управления летательного аппарата и выполнения полетного задания, грузовую платформу, шасси, отличающийся тем, что корпус универсального многофункционального летательного аппарата выполнен в виде пространственной рамы, состоящей из профильных труб, собираемых с помощью болтовых соединений, представляющей собой ферменную конструкцию прямоугольной формы, которая включает верхний и нижний силовые пояса, между которыми образована центральная часть пространственного объема конструкции летательного аппарата, верхний силовой пояс включает распределяющий редуктор (1), имеющий корпус, внутри которого расположены пять шестерен, одна малая ведущая шестерня (2), приводимая во вращение карданным валом ДВС, и две пары (3, 4) больших ведомых шестерен, одна пара (3) из которых приводится во вращение малой ведущей шестерней (2), а другая пара (4) приводится во вращение от упомянутой пары (3) ведомых шестерен, сверху распределяющего редуктора (1) на одном уровне в горизонтальной плоскости выведены четыре шкива приводных ремней (5), которые жестко закреплены с большими ведомыми шестернями распределяющего редуктора (1) на своих валах, к корпусу распределяющего редуктора (1) под углами 90° с помощью болтовых соединений крепятся четыре консоли (6), каждая из которых содержит привод с зубчатым ремнем (7), ротор (8) с двумя прямоугольными металлическими лопастями (9) и систему управления изменения шага лопастей, каждая прямоугольная металлическая лопасть (9) изготовлена экструзионным способом и имеет отрицательную крутку, каждая консоль на своем конце имеет вилку (10) с возможностью линейного перемещения для регулирования натяжения зубчатого ремня (7), в которой на валу содержится ведомый шкив (11) привода ротора, вращение ротора обеспечивается за счет двух подшипников (12), установленных в оконечностях верхней и нижней части вилки (10), верхняя часть вала системы управления изменения шага лопастей между ротором (8) и вилкой (10) включает скользящий подшипниковый узел (13), соединенный посредством двух тяг (14) с металлическими лопастями (9) ротора (8) для изменения угла атаки общего шага лопастей, подшипниковый узел (13) закрыт от внешних воздействий гофрой и в своем основании соединен с тягой (15) привода изменения общего шага лопастей, приводимый в действие сервоприводом (16) посредством рычага (17), задействуя угловой рычаг (18), центральная часть каждой консоли имеет, по меньшей мере, один механизм устранения вибраций и частичного натяжения зубчатого ремня (7), состоящий из двух рычагов (19), на концах которых расположены подшипниковые ролики (20) с буртиками по ширине зубчатого ремня (7), ролики (20) рычагов (19) расположены зеркально с внешних сторон зубчатого ремня (7) и стянуты друг с другом спиральными пружинами, другие концы рычагов (19) закреплены на консоли (6) общим болтом, обеспечивая их подвижность, все консоли (6) по периметру соединены между собой силовыми тросами (21), нижний силовой пояс, выполняющий функцию грузовой площадки, содержит квадратную раму (22) продуваемой конструкции из профильных труб, по углам (23) в нижней части рамы установлены самоцентрирующиеся колеса (24) с амортизирующими элементами, каждый угол (23) квадратной рамы (22) нижнего силового пояса соединен с верхним силовым поясом посредством двух подкосов (25) в виде профильных труб, закрепленных одними своими концами в каждом углу (23) нижнего силового пояса, а другими концами - к узлам (26) крепления на корпусе распределяющего редуктора (1) и к узлам (27) крепления вилок (10), образуя продуваемые треугольные соединения, в центральной части пространственного объема конструкции летательного аппарата размещено место пилота (28) и/или дополнительного груза (28), сзади которого смонтирован ДВС (29) с вертикальной установкой и сухим картером, причем на карданном валу ДВС (29) установлена обгонная муфта (30), позволяющая использовать режим авторотации в случае отказа ДВС (29) для относительно безопасной посадки летательного аппарата.
2. Универсальный многофункциональный летательный аппарат квадрокоптерного типа по п. 1, отличающийся тем, что каждая прямоугольная металлическая лопасть (9) включает два шариковых подшипника и один игольчатый подшипник.
3. Универсальный многофункциональный летательный аппарат квадрокоптерного типа по п. 1, отличающийся тем, что каждая вилка (10) является отдельным вставным элементом поверх конечной части консоли (6) с возможностью линейного перемещения вилки (10) с помощью резьбового болта, обеспечивая натяжение зубчатого ремня (7).
| ПРЕОБРАЗОВАТЕЛЬ ИНТЕГРАЛЬНЫХ ХАРАКТЕРИСТИК ПЕРЕМЕННЫХ НАПРЯЖЕНИЙ И МОЩНОСТИ В ИНТЕРВАЛ ВРЕМЕНИ | 1967 |
|
SU222735A1 |
| CN 205168885 U, 20.04.2016 | |||
| FR 3016155 A1, 10.07.2015 | |||
| EP 3700812 B1, 27.11.2024 | |||
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2718460C1 |

