Изобретение относится к радиотехнике и может быть использовано для прецизионного определения расстояния между произвольным количеством подвижных объектов в любой момент времени.
Известен импульсный светодальномер с пассивным отражателем [1], использующий временной метод измерения расстояния на основе принципа обратной связи.
Известный светодальномер состоит из ведущей и ведомой станций, установленных на произвольных подвижных объектах, между которыми требуется определить расстояние. Ведущая станция содержит передатчик оптического диапазона, приемопередающую систему (антенна оптического диапазона), приемник оптического диапазона и частотомер в качестве осредняющего счетчика. Ведомая станция состоит из пассивного отражателя, в качестве которого, как правило, используется уголковый отражатель. Информация о расстоянии между объектами в цифровой форме вырабатывается осредняющим счетчиком и пропорциональна частоте формируемой за счет обратной связи импульсной последовательности зондирующего сигнала.
Схема построения известного светодальномера за счет использования отсчетов времени запаздывания отраженных импульсов имеет принципиально невысокую точность измерений, сильно зависит от качества юстировки ведущей и ведомой станций, расстояния между ними, погодных условий и позволяет измерить расстояние только между двумя объектами.
Известен гетеродинный некогерентный радиодальномер (РД) с активным отражателем [2], использующий фазовый метод измерения расстояния.
Ведущая и ведомая станции известного радиодальномера, установленные на произвольных подвижных объектах, между которыми измеряют расстояние, излучают электромагнитные колебания разных, но близких частот: ведущая - частоту f1, а ведомая - частоты f2 и F2, причем f1≥f2, а F2<<f1, f2. Ведущая станция содержит высокочастотный (ВЧ) передатчик, ВЧ и низкочастотный (НЧ) приемники, приемопередающую антенну, смеситель и фазометр. Ведомая станция содержит ВЧ приемник, ВЧ и НЧ передатчики, приемопередающую антенну и смеситель. Информация о расстоянии между объектами определяется фазометром ведущей станции и пропорциональна разности фаз между ВЧ и НЧ колебаниями.
Схема построения известного РД для обеспечения необходимой ширины зоны однозначности измерений требует значительного усложнения за счет одновременного использования нескольких пар несущих частот электромагнитных колебаний, что принципиально не позволяет увеличить число объектов, между которыми измеряется расстояние.
Наиболее близким техническим решением к предлагаемому изобретению является когерентный радиодальномер [3] , работающий в режиме излучения радиоимпульсов с линейной частотной модуляцией (ЛЧМ), в котором для измерения расстояния между объектами используется двухшкальная измерительная система, основанная на определении положения инвариантной к дальности характерной точки половинной мощности на нижнем крае энергетического спектра преобразованного отраженного сигнала, образующегося в результате гетеродинирования принимаемого отраженного сигнала копией зондирующего ЛЧМ радиоимпульса, смещенной относительно него по частоте на величину первой промежуточной частоты приемного тракта и совмещенной по времени с отраженным сигналом.
Известный радиодальномер состоит из ведущей станции, которая содержит последовательное соединение генератора ЛЧМ импульсов, формирователя зондирующего и гетеродинного сигналов (ФЗГС), усилителя, первого развязывающего блока (РБ) и первой антенной, к второму выходу первого РБ последовательно подключены первый смеситель, второй вход которого соединен с вторым выходом ФЗГС, первый приемник, выход которого параллельно соединен с вторым, третьим и четвертым смесителями, блок поиска по дальности (БПД) и блок синхронизации и формирования временной подставки (БСФВП), первый выход которого подключен к входу генератора ЛЧМ импульсов, второй выход соединен с вторым входом ФЗГС, а третий выход заведен на первый вход цифрового сумматора, второй смеситель, к выходу которого параллельно подключены как последовательное соединение первого полосового фильтра (ПФ), первого квадратора, первого фильтра нижних частот (ФНЧ), первого сумматора, первого аттенюатора, второго аттенюатора, первого вычитателя и регулируемого усилителя, второй вход которого соединен с выходом генератора опорной частоты (ГОЧ), так и последовательное соединение второго ПФ, второго квадратора, второго ФНЧ, второго сумматора, второго вычитателя, второй вход которого соединен с выходом первого аттенюатора, и третьего сумматора, второй вход которого соединен с выходом регулируемого усилителя, третий смеситель, к выходу которого параллельно подключены как последовательное соединение третьего ПФ, третьего квадратора, третьего ФНЧ, выход которого соединен с вторым входом второго сумматора, и третьего вычитателя, второй вход которого соединен с выходом второго ФНЧ, а выход соединен с вторым входом первого вычитателя, так и последовательное соединение четвертого ПФ, четвертого квадратора, четвертого ФНЧ, выход которого соединен с вторым входом первого сумматора, к выходу третьего сумматора параллельно подключены как последовательное соединение первого амплитудного детектора (АД), пятого ФНЧ, первого перестраиваемого гетеродина, выход которого соединен с вторым входом второго смесителя, и первого осредняющего счетчика, выход которого соединен с вторым входом цифрового сумматора, так и последовательное соединение второго АД, шестого ФНЧ, второго перестраиваемого гетеродина, выход которого соединен с вторым входом третьего смесителя, и второго осредняющего счетчика, выход которого соединен с третьим входом цифрового сумматора, четвертый смеситель, к выходу которого параллельно подключены как последовательное соединение пятого ПФ, пятого квадратора, седьмого ФНЧ, третьего аттенюатора, четвертого вычитателя, интегратора, третьего перестраиваемого гетеродина, выход которого соединен с вторым входом четвертого смесителя, и третьего осредняющего счетчика, выход которого соединен с четвертым входом цифрового сумматора, так и последовательное соединение шестого ПФ, шестого квадратора, восьмого ФНЧ, выход которого соединен с вторым входом четвертого вычитателя, причем выход цифрового сумматора является выходом дальномера, выдающим в цифровой форме информацию о расстоянии между ведущей и ведомой станциями, которая, в свою очередь, содержит последовательное соединение второй антенны, второго РБ, пятого смесителя, второй вход которого соединен с выходом второго ГОЧ, второго приемника, выход которого соединен с первым входом второго РБ.
Схема построения известного радиодальномера принципиально позволяет в текущем режиме времени прецизионно измерять расстояние только между двумя подвижными объектами, на которых установлены ведущая и ведомая станции.
Задачей настоящего изобретения является создание радиодальномера, выполняющего прецизионные измерения расстояния между произвольным количеством подвижных объектов в любой момент времени.
Техническим результатом предложенного РД является необходимое расширение числа участников измерений расстояния без потери прецизионной точности в реальном масштабе времени на основе частотного и пеленгационного методов измерений за счет использования многошкальной измерительной системы.
Технический результат достигается тем, что в радиодальномер, ведущая станция которого получившая название центрального пункта измерений (ЦПИ) содержит последовательное соединение первого генератора ЛЧМ импульсов, первого ФЗГС, первого усилителя, первого РБ, второй выход которого соединен с входом первого приемника, и первой антенны, последовательное соединение первого смесителя, первого ПФ, первого БПД, первого БСФВП, третий выход которого соединен с третьим входом первого цифрового сумматора, каждая из "N" одинаковых ведомых станций содержит последовательное соединение четвертой антенны, второго РБ и четвертого приемника, в ведущую станцию РД дополнительно введены генератор тактовых импульсов, выход которого параллельно соединен как с входом первого генератора ЛЧМ импульсов, выход которого параллельно соединен с "N" вторыми ФЗГС, так и с вторым входом первого ФЗГС, выход первого приемника параллельно соединен с первыми "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение первого частотного демодулятора и первого смесителя, выход первого ПФ параллельно соединен с входом первого блока прецизионных измерений, выходы которого соответственно соединены с первым и вторым входами первого цифрового сумматора, выход которого последовательно соединен с решающим устройством и электронной вычислительной машиной (ЭВМ), которая в цифровой форме выдает информацию о расстоянии между произвольными подвижными объектами в любой момент времени, последовательное соединение второй антенны и второго приемника, выход которого параллельно соединен с вторыми "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение второго частотного демодулятора и первого амплитудного детектора, выход которого соединен с вторым входом решающего устройства, последовательное соединение третьей антенны и третьего приемника, выход которого параллельно соединен с третьими "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение третьего частотного демодулятора и второго амплитудного детектора, выход которого соединен с третьим входом решающего устройства, в ведомую станцию дополнительно введено последовательное соединение частотного модулятора, вход которого соединен с выходом четвертого приемника, и второго усилителя, выход которого соединен с первым входом второго РБ, и появилось вынесенное устройство - ДПИ, который содержит последовательное соединение пятой антенны, пятого приемника, второго ПФ, второго генератора ЛЧМ импульсов, выход которого параллельно соединен с "N" третьими ФЗГС, выход пятого приемника параллельно соединен с четвертыми "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение четвертого частотного демодулятора, второго смесителя, второй вход которого соединен с вторым выходом третьего ФЗГС, и третьего ПФ, выход которого параллельно соединен как с последовательным соединением второго блока прецизионных измерений и второго цифрового сумматора, так и с последовательным соединением второго БПД и третьего БСФВП, второй выход которого соединен с вторым входом третьего ФЗГС, а третий выход соединен с третьим входом второго цифрового сумматора, причем выход этого цифрового сумматора из ДПИ соединен с четвертым входом решающего устройства.
Общим для предлагаемого РД с прототипом признаком является использование одинаковых типовых элементов структурной схемы, одинаково соединенных в цепи, таких как генератор ЛЧМ импульсов, ФЗГС, БСФВП, БПД, ПФ, смеситель, усилитель, два РБ, две антенны, два приемника, два АД и цифровой сумматор, причем прототип можно рассматривать как частный случай предложенного РД, который прецизионно измеряет расстояние только между двумя подвижными объектами в реальном масштабе времени.
К отличиям предложенного РД относится усложнение его структурной схемы, связанное с одновременной параллельной обработкой дальномерной и пеленгационной информации от "N" различных подвижных объектов и заключающееся в появлении дополнительных элементов в составе ведущего и ведомых блоков - генератора тактовых импульсов, частотных модуляторов и демодуляторов, блоков прецизионных измерений, решающего устройства и ЭВМ, а также ДПИ, который содержит антенну, приемник, ПФ, генератор ЛЧМ импульсов, "N" канальную измерительную систему, каждый канал которой содержит частотный демодулятор, смеситель, ПФ, блок прецизионных измерений, ФЗГС, БПД, БСФВП и цифровой сумматор.
На фиг. 1 изображена структурная схема предложенного "N" канального радиодальномера с указанием произвольного "i" канала прохождения сигналов от соответствующего подвижного объекта.
Этот радиодальномер (фиг.1), центральный пункт измерений которого, выполняющий роль ведущей станции, содержит первый генератор 1 тактовых импульсов, выход которого параллельно соединен как с первым генератором 2 ЛЧМ импульсов, выход которого соединен с первым входом первого формирователя 3 зондирующего и гетеродинного сигналов, так и с последовательным соединением первого ФЗГС 3, первого усилителя 4, первого развязывающего блока 5, второй выход которого соединен с входом первого приемника 6, и первой антенны 7, выход первого генератора 2 ЛЧМ импульсов параллельно соединен с "N" вторыми ФЗГС 8, а выход первого приемника 6 параллельно соединен с первыми "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение "i" первого частотного демодулятора 9, выполняющего выбор заданного "i" подвижного объекта, первого смесителя 10, второй вход которого соединен с вторым выходом "i" второго ФЗГС 8, полосового фильтра 11, выход которого параллельно соединен как с последовательным соединением первого блока 12 прецизионных измерений, первого цифрового сумматора 13 и решающего устройства 14, выход которого соединен с "i" входом ЭВМ 15, так и с последовательным соединением первого блока 16 поиска по дальности и первого блока 17 синхронизации и формирования временной подставки, второй выход которого соединен с вторым входом второго формирователя 8 зондирующего и гетеродинного сигналов, а третий выход соединен с третьим входом первого цифрового сумматора 13, последовательное соединение второй антенны 18 и второго приемника 19, выход которого параллельно соединен с вторыми "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение "i" второго частотного демодулятора 20, выполняющего выбор заданного "i" подвижного объекта, и первого АД 21, выход которого соединен с вторым входом "i" решающего устройства 14, последовательное соединение третьей антенны 22 и третьего приемника 23, выход которого параллельно соединен с третьими "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение "i" третьего частотного демодулятора 24, выполняющего выбор заданного "i" подвижного объекта, и второго АД 25, выход которого соединен с третьим входом "i" решающего устройства 14, каждая из "N" одинаковых ведомых станций, расположенных на произвольных подвижных объектах, содержит последовательное соединение четвертой антенны 26, второго развязывающего блока 27, четвертого приемника 28, частотного модулятора 29 и второго усилителя 30, выход которого соединен с первым входом второго развязывающего блока 27, и дополнительный пункт измерений, который содержит последовательное соединение пятой антенны 31, пятого приемника 32, второго полосового фильтра 33, второго генератора 34 ЛЧМ импульсов, выход которого параллельно соединен с "N" третьими формирователями 35 зондирующего и гетеродинного сигналов, выход пятого приемника 32 параллельно соединен с вторыми "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение "i" второго демодулятора 36, выполняющего выбор заданного "i" подвижного объекта, второго смесителя 37, второй вход которого соединен с вторым выходом "i" третьего формирователя 35 зондирующего и гетеродинного сигналов, и третьего полосового фильтра 38, выход которого параллельно соединен как с последовательным соединением второго блока 39 прецизионных измерений и второго цифрового сумматора 40, так и с последовательным соединением второго блока 41 поиска по дальности и второго блока 42 синхронизации и формирования временной подставки, второй выход которого соединен с вторым входом третьего формирователя 35 зондирующего и гетеродинного сигналов, а третий выход соединен с третьим входом второго цифрового сумматора 40, причем выход этого сумматора 40 из ДПИ соединен с четвертым входом решающего устройства 14.
Предложенный радиодальномер, имеющий когерентный принцип построения, работает следующим образом.
Принцип работы РД основан на определении координат произвольного подвижного объекта в любой момент времени относительно задающих плоскость измерений двух базовых точек (маяков), местоположение которых заранее известно с заданной точностью [4]. Каждый из маяков, принимая сигналы произвольного подвижного объекта, на основе частотного метода измерений самостоятельно определяет расстояние до него, причем один из маяков выполняет еще и грубую пеленгацию объектов. Эти результаты R1, R2, и ϕ, используя разностно-дальномерный алгоритм обработки и данные пеленгации [4], позволяют однозначно определить координаты данного объекта на плоскости и во времени. Один из маяков (ведущая станция) получил название ЦПИ и имеет приемопередающую и пеленгационную аппаратуру, а другой, получивший название ДПИ, - только приемную, причем он электрически связан с ЦПИ, где непосредственно вычисляются текущие координаты всех объектов.
В когерентной системе ведущая станция (ЦПИ) РД (фиг.1) непрерывно генерирует и излучает задающие временной режим работы всей системы зондирующие сигналы, поступающие на "N" ведомых станций, расположенных на различных подвижных объектах, и на вынесенное устройство (ДПИ). Каждая из ведомых станций непрерывно формирует и излучает индивидуальные дальномерные сигналы ответа. ЦПИ и ДПИ принимают эти сигналы и извлекают дальномерную информацию в реальном масштабе времени, используя одинаковые принципы обработки и получая в ЦПИ с учетом результатов пеленгации прецизионные координаты каждого подвижного объекта, на котором установлена ведомая станция, на поверхности Земли в любой момент времени.
Блоки 1-17 (фиг. 1) ведущей станции (ЦПИ) РД представляют собой блоки типовой импульсной когерентной запросно-ответной системы с внутриимпульсной ЛЧМ используемого сигнала, принцип работы которой достаточно полно описан в [3] . В данной многоканальной системе измерения расстояний производятся при помощи демодуляции принимаемых индивидуальных дальномерных сигналов ответа от ведомых станций методом их гетеродинирования аналогичной копией, формируемой в пунктах измерений (ЦПИ и ДПИ), смещенной относительно них на величину первой промежуточной частоты приемного тракта и совмещенной по времени с данным сигналом ответа с учетом результатов пеленгации каждого подвижного объекта.
Первый генератор 1 тактовых импульсов (фиг.1) вырабатывает последовательность синхроимпульсов, обеспечивающих заданный временной режим работы всего РД, т.е. синхронизирует работу первого 2 и второго 34 генераторов ЛЧМ импульсов, входящих в состав системы. Период ее следования Тсл для устранения многозначности должен удовлетворять следующему условию: Тсл≥2Rmax/C, где Rmax - максимальная дальность действия РД, а С - скорость света. Передающая часть РД - сформированный первым генератором 1 сигнал синхронизации - возбуждает в генераторе 2 ЛЧМ последовательность радиоимпульсов, которая в первом ФЗГС 3 преобразуется в зондирующий сигнал, усиливается в первом усилителе 4, через первый РБ 5 поступает в первую антенну 7 и излучается. Переданный произвольной "i" ведомой станцией (фиг.1) в текущем режиме времени индивидуальный дальномерный сигнал ответа с заданными параметрами поступает через ту же антенну 7 и первый РБ 5 в приемную часть РД. Она состоит из первого приемника 6, где фильтруются и усиливаются все принятые от объектов сигналы, и первой измерительной системы, состоящей из "N" одинаковых каналов обработки. Каждый из каналов содержит последовательное соединение первого частотного демодулятора 9, выполняющего выбор заданного "i" подвижного объекта, первого смесителя 10, выполняющего перенос дальномерного спектра на величину, равную номинальному значению первой промежуточной частоты обработки fпч1, и первого ПФ 11, выход которого параллельно соединен с грубой и прецизионной шкалами измерений в составе "i" канала обработки. Первый генератор 1 тактовых импульсов задает временной режим работы первого генератора 2 ЛЧМ импульсов, выход которого параллельно соединен с "N" вторыми ФЗГС 8, разделяющими полученную последовательность радиоимпульсов на зондирующую и гетеродинную в соответствии с управляющими сигналами первых БСФВП 17. Полученный гетеродинный сигнал с второго выхода "i" второго ФЗГС 8 поступает на второй вход "i" первого смесителя 10, обеспечивая заданный перенос спектра с учетом времени прихода сигнала ответа "i" ведомой станции.
Прецизионное уточнение расстояния между ЦПИ и "i" объектом в текущем режиме времени в пределах ограниченной зоны однозначного измерения, т.е. определение высокоточной добавки к полученному значению грубой временной подставки, производится первым блоком 12 прецизионных измерений методом определения положения характерной точки половинной мощности на нижнем крае энергетического спектра преобразованного дальномерного сигнала ответа в пределах полосы частот, соответствующей удвоенной величине дискрета изменения задержки гетеродинных импульсов, на основе суммарно-разностной обработки амплитудных соотношений используемых выборок [3]. Расширение зоны однозначности без потери точности измерений в предлагаемом РД реализовано добавлением грубой шкалы отсчета, состоящей из последовательного соединения первого БПД 16, выполняющего грубое измерение расстояния между ЦПИ и "i" объектом [3] , и первого БСФВП 17, формирующего цифровое значение этого расстояния, второй выход которого соединен с вторым входом "i" второго ФЗГС 8. Выходы первого блока 12 прецизионных измерений соединены с первым и вторым входами первого "i" цифрового сумматора 13, а третий выход первого БСФВП 17 соединен с его третьим входом. Выход "i" первого цифрового сумматора 13, вычисляющего дальность ЦПИ до "i" объекта в данный момент времени, соединен с первым входом "i" решающего устройства 14, в качестве которого используется специализированный микропроцессор с заданным алгоритмом вычислений.
Принцип работы используемой в данном РД грубой пеленгационной системы изложен в [5]. Она позволяет точно определить в какой из двух полуплоскостей в данный момент времени находится "i" подвижный объект, добиваясь необходимой однозначности определения его местоположения [4]. Это обеспечивается использованием антенн, имеющих ширину диаграммы направленности не менее 180o. Данная пеленгационная система состоит из двух одинаковых каналов, результаты угловых измерений которых сравниваются в "i" решающем устройстве 14, дополняя разностно-дальномерный алгоритм обработки. Первый канал состоит из последовательного соединения второй антенны 18 и второго приемника 19, выход которого параллельно соединен с вторыми "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение второго частотного демодулятора 20, выполняющего выбор заданного "i" подвижного объекта, и первого АД 21, выход которого соединен с вторым входом "i" решающего устройства 14. Второй канал состоит из последовательного соединения третьей антенны 22 и третьего приемника 23, выход которого параллельно соединен с третьими "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение третьего демодулятора 24, выполняющего выбор заданного "i" подвижного объекта, и второго АД 25, выход которого соединен с третьим входом "i" решающего устройства 14. Полученное "i" решающим устройством 14 значение координаты местоположения "i" подвижного объекта на поверхности Земли в данный момент времени через "i" вход заносится в память ЭВМ 15 для последующего построения его траектории движения и определения взаимного расстояния между различными объектами в реальном масштабе времени.
Каждая из "N" ведомых станций, установленных на подвижных объектах, данного РД (фиг. 1), представляет собой самостоятельный активный блок, работающий по принципу стандартного передатчика пачек индивидуальных дальномерных радиоимпульсов, полученных из ЛЧМ импульсов ведущей станции (ЦПИ). Четвертая антенна 26 принимает радиоимпульсы ЦПИ и через второй РБ 27 подает на вход четвертого приемника 28, который их фильтрует, усиливает и пропускает на вход частотного модулятора 29. Этот модулятор 29 "i" ведомой станции вносит необходимые индивидуальные частотные отличия в линейный закон изменения частоты сигнала ответа, который усиливается во втором усилителе 30, через второй РБ 27 поступает на четвертую антенну 26 и излучается ею. Этот дальномерный сигнал принимают ЦПИ и ДПИ и обрабатывают в соответствии с заложенным алгоритмом вычислений.
Вынесенное устройство (ДПИ) (фиг.1) реализует тот же алгоритм вычисления расстояния до "i" объекта, что и ЦПИ, передавая полученные результаты на соответствующее решающее устройство 14 ведущей станции (ЦПИ). Пятая антенна 31 принимает ЛЧМ импульсы ЦПИ и индивидуальные дальномерные сигналы ведомых станций подвижных объектов, а пятый приемник 32 фильтрует и усиливает их. Второй ПФ 33 выделяет ЛЧМ импульсы ЦПИ, задавая временной режим работы второго генератора 34 ЛЧМ импульсов, выход которого параллельно соединен с "N" третьими ФЗГС 35, разделяющими полученную последовательность радиоимпульсов на зондирующую и гетеродинную в соответствии с управляющими сигналами вторых БСФВП 42. Переданный произвольной "i" ведомой станцией индивидуальный дальномерный сигнал ответа с заданными параметрами с выхода пятого приемника 32 поступает во вторую измерительную систему, состоящую из "N" одинаковых каналов обработки. Каждый из каналов содержит последовательное соединение второго частотного демодулятора 36, выполняющего выбор заданного "i" подвижного объекта, второго смесителя 37, второй вход которого соединен с вторым выходом "i" третьего ФЗГС 35, обеспечивая заданный перенос спектра, и третьего ПФ 38, выход которого параллельно соединен как с вторым блоком 39 прецизионных измерений, так и с последовательным соединением второго БПД 41 и второго БСФВП 42, причем выходы второго блока 39 соединены с первым и вторым входами второго "i" цифрового сумматора 40, а третий выход второго БСФВП 42 соединен с его третьим входом. Выход второго "i" цифрового сумматора 40 из состава ДПИ соединен с четвертым входом "i" решающего устройства 14 в составе ЦПИ.
К приведенному описанию заявляемого устройства со ссылками на позиции его структурной схемы (фиг.1) даем примеры реализации хорошо известных блоков "i" канала измерений, которые в данной системе используются в заданном ограниченном объеме, что не влияет на качество работы всей системы.
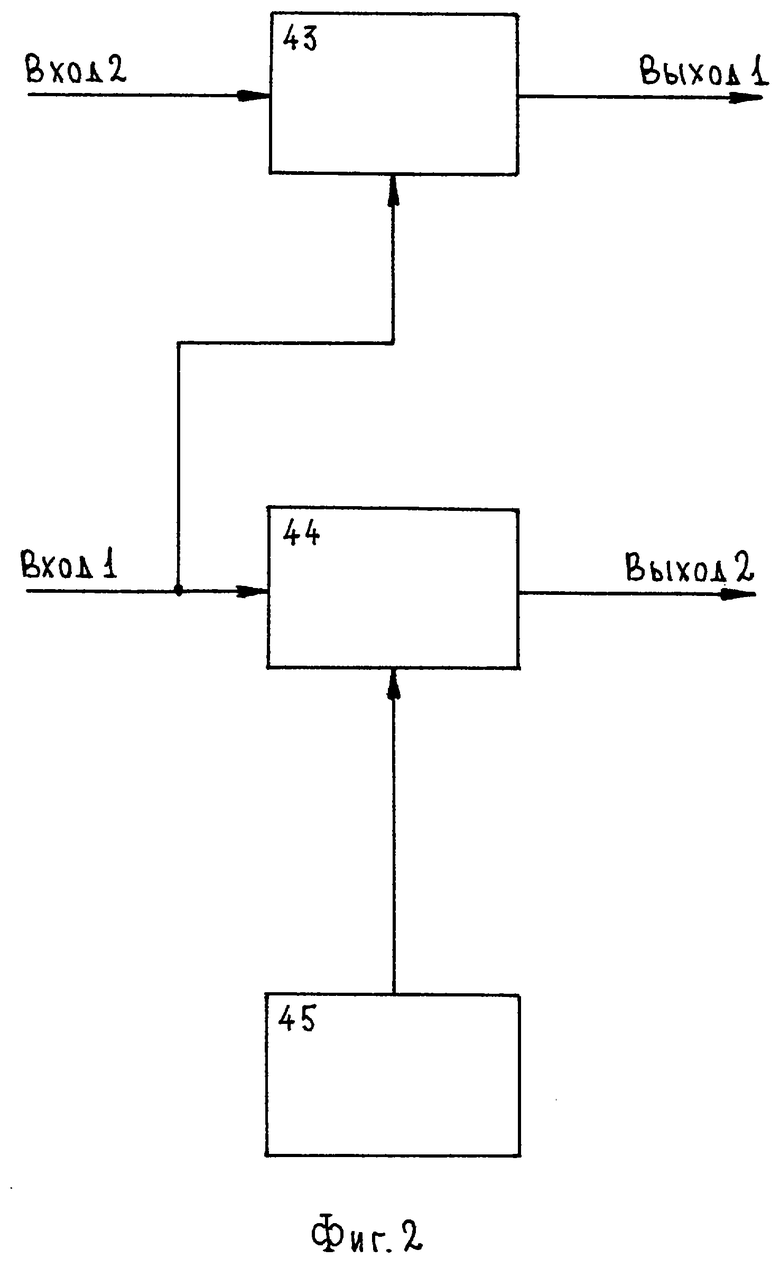
Вариант структурной схемы второго формирователя 8 зондирующего и гетеродинного сигналов, имеющего два входа и два выхода, представлен на фиг.2. Первый вход этого ФЗГС 8 соединен с выходом первого генератора 2 ЛЧМ импульсов (фиг.1), сигнал от которого подается на вход аналогового ключа 43 и на один из входов балансного смесителя 44, на второй вход которого подан сигнал со стабилизированного первого генератора 45 опорной частоты, при этом несущая частота зондирующего ЛЧМ импульса сдвигается на величину, равную номинальному значению первой промежуточной частоты обработки fпч1. Второй вход первого формирователя 8 соединен с вторым выходом первого блока 17 синхронизации и формирования временной подставки, сигнал которого подается на управляющий вход аналогового ключа 43, задавая временной режим его работы. Первый выход второго ФЗГС 8, служащий выходом сформированного зондирующего сигнала, в данном случае не используется, а второй выход, служащий выходом опорного гетеродинного сигнала, параллельно соединен с "N" вторыми входами первых смесителей 10, входящих в состав первых "N" одинаковых каналов обработки. Аналогично работает третий ФЗГС 35 в составе ДПИ, а первый ФЗГС 3 в составе ведущей станции осуществляет только формирование ее зондирующего (дальномерного) сигнала.
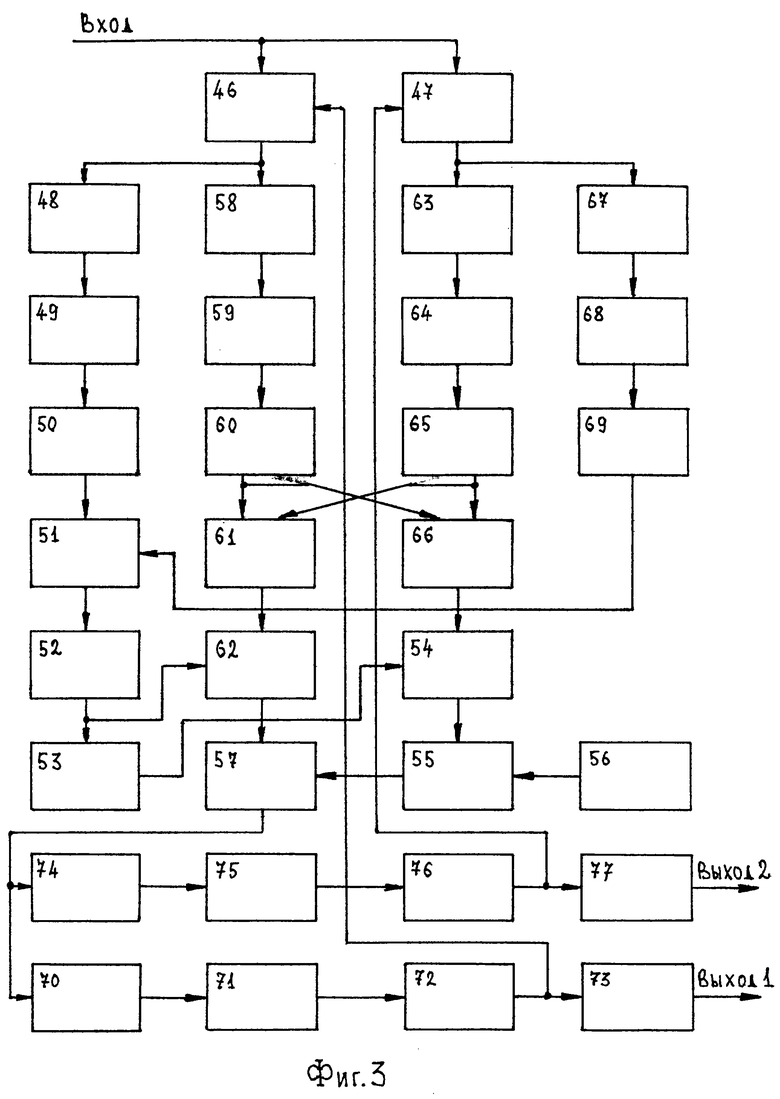
Пример реализации первого блока 12 прецизионных измерений, имеющего один вход и два выхода, представлен на фиг.3. Работа данного блока 12 построена на частотном стробировании и выборке трех заданным образом разнесенных по частоте участков энергетического спектра, которое выполняется в реальном масштабе времени двухканальным устройством прецизионной обработки дальномерной информации, причем фильтрующая часть каждого из каналов построена по принципу "следящего" гетеродина. Первый канал этой системы выполняет одновременное двухчастотное стробирование дальномерного спектра полосовыми фильтрами с фиксированными частотами настройки f1 и f10, а второй канал - ПФ с фиксированными частотами настройки f2 и f20, что за счет заданного соотношения между амплитудами полученных выборок обеспечивает постоянную разность частот в обоих каналах. При построении структурной схемы блока 12 следует учитывать, что амплитуды выборок на частотах f10 и f20 равны между собой, т. к. лежат в плоской области максимального значения спектра преобразованного отраженного ведомой станцией сигнала, дополнительной информации не несут и считаются за одну частотную выборку удвоенного значения.
Блок 12 прецизионных измерений (фиг.3) содержит параллельное соединение третьего 46 и четвертого 47 смесителей, причем к выходу третьего смесителя 46 параллельно подключены как последовательное соединение четвертого ПФ 48, первого квадратора 49, первого ФНЧ 50, первого сумматора 51, первого аттенюатора 52, второго аттенюатора 53, первого вычитателя 54, регулируемого усилителя 55, второй вход которого соединен с выходом второго ГОЧ 56, и второго сумматора 57, так и последовательное соединение пятого ПФ 58, второго квадратора 59. второго ФНЧ 60, третьего сумматора 61 и второго вычитателя 62, второй вход которого соединен с выходом первого аттенюатора 52, а выход - с вторым входом второго сумматора 57, к выходу четвертого смесителя 47 параллельно подключены как последовательное соединение шестого ПФ 63, третьего квадратора 64, третьего ФНЧ 65, выход которого соединен с вторым входом третьего сумматора 61, и третьего вычитателя 66, второй вход которого соединен с выходом второго ФНЧ 60, а выход соединен с вторым входом первого вычитателя 54, так и последовательное соединение седьмого ПФ 67, четвертого квадратора 68 и четвертого ФНЧ 69, выход которого соединен с вторым входом первого сумматора 51, к выходу второго сумматора 57 параллельно подключены как последовательное соединение третьего АД 70, пятого ФНЧ 71, первого перестраиваемого гетеродина 72, выход которого соединен с вторым входом третьего смесителя 46, и первого осредняющего счетчика 73, выход которого является первым выходом блока 12 прецизионных измерений, так и последовательное соединение четвертого АД 74, шестого ФНЧ 75, второго перестраиваемого гетеродина 76, выход которого соединен с вторым входом четвертого смесителя 47, и второго осредняющего счетчика 77, выход которого является вторым выходом блока 12 прецизионных измерений.
Поступивший от ведомой станции спектр преобразованного сигнала, поданный с выхода первого ПФ 11 (фиг.1), переносится двумя смесителями 46 и 47 в область промежуточной частоты f'пч и далее четырьмя полосовыми фильтрами 48, 58, 63 и 67, частоты настройки которых соответственно равны f10, f1 и f2, f20, осуществляется одновременное стробирование трех участков энергетического спектра преобразованного отраженного сигнала в окрестности его нижнего края. Для оценки энергии стробируемых спектральных составляющих на выходе ПФ соответственно включены квадраторы 49, 59, 64 и 68 и осредняющие устройства 50, 60, 65 и 69 - ФНЧ. С выходов второго 60 и третьего 65 ФНЧ сигналы, определяющие энергию спектральных составляющих первого и второго стробируемых участков, расположенных симметрично относительно характерной точки половинной мощности на нижнем крае энергетического спектра, поступают на входы третьего сумматора 61 и далее на вход второго вычитателя 62, на второй вход которого с выхода первого аттенюатора 52 поступает опорный сигнал, сформированный как сумма сигналов с выходов первого 50 и четвертого 69 ФНЧ в первом сумматоре 51, ослабленный в два раза в первом аттенюаторе 52 и соответствующий энергии спектральной составляющей третьего стробируемого участка. Сигналы, поступившие с выходов второго 60 и третьего 65 ФНЧ, сравниваются в третьем вычитателе 66, а полученная разность подается на второй вход первого вычитателя 54 для сравнения с опорным уровнем, сформированным вторым аттенюатором 53. Полученный в результате сравнения разностный сигнал поступает на управляющий вход регулируемого усилителя 55, причем его значение вызывает изменение коэффициента усиления этого усилителя 55, что приводит к изменению амплитуды поступающего на его вход опорного сигнала с выхода второго ГОЧ 56. Выход регулируемого усилителя 55 соединен с первым входом второго сумматора 57, поэтому это изменение, определяющее симметричность расположенного первого f1 и второго f2 стробируемых участков спектра относительно характерной точки fR0, совместно с сигналом рассогласования ΔR0 от второго вычитателя 62, вызывает соответствующее изменение расстояния между стробируемыми участками на шкале частот. К выходу второго сумматора 57 подключены параллельно два канала, формирующие низкочастотные сигналы управления значениями частот f1гет и f2гет перестраиваемых гетеродинов 72 и 76 и соответственно состоящие из третьего 70 и четвертого 74 АД, пятого 71 и шестого 75 ФНЧ, при этом точное значение частоты характерной точки fR0, соответствующее расстоянию между объектами RО, пропорционально полусумме частот f1гет и f2гет, одновременно подстраивая результирующие частоты третьего 46 и четвертого 47 смесителя. Для получения численного значения добавки ΔR'0 сигналы с выходов этих гетеродинов 72 и 76 подаются на осредняющие счетчики 73 и 77 и далее на первый и второй входы первого цифрового сумматора 13, где складываются со значением кода временной подставки с третьего выхода первого блока 17 синхронизации и формирования временной подставки (фиг.1). Аналогично работает второй блок 39 прецизионных измерений в составе ДПИ.
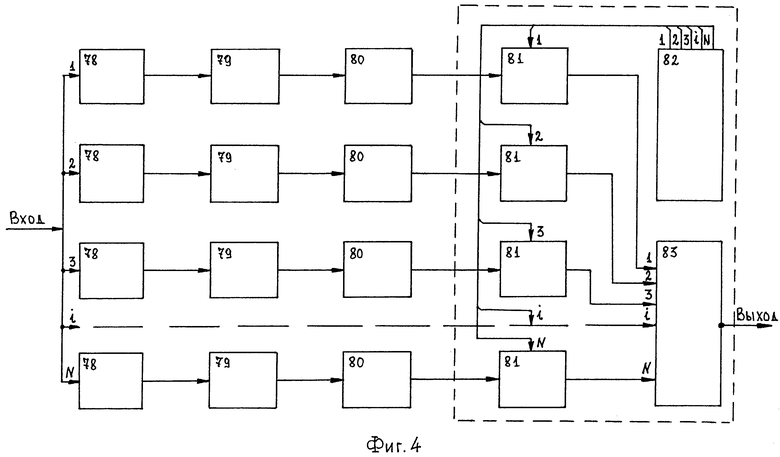
Вариант структурной схемы первого блока 16 поиска по дальности типового импульсного когерентного РД, имеющего один вход и один выход, представлен на фиг. 4. Данный блок представляет собой "N" канальный параллельный анализатор спектра с включенным на его выходе обнаружителем сигнала, который обведен на фиг.4 штрих-пунктирной линией. Каждый "i" канал анализатора спектра содержит восьмой ПФ 78, амплитудно-частотная характеристика (АЧХ) которого перекрывается с АЧХ ПФ соседнего канала по уровню 0.707, пятый квадратор 79 и седьмой ФНЧ 80 в качестве накопителя сигналов. В составе обнаружителя сигнала входят аналоговые компараторы 81, источник 82 опорных напряжений и "N" входовая схема И-НЕ 83.
Работа первого БПД 16 (фиг.1) совместно с первым БСФВП 17 происходит следующим образом: с выхода первого ПФ 11 на вход БПД 16, являющегося анализатором спектра, поступает преобразованный отраженный сигнал, для которого производится оценка формы его энергетического спектра, получаемого в виде спектральных выборок (отсчетов), амплитуда которых пропорциональна их мощности, а также оценка положения спектра на шкале дальномерных частот. При этом ПФ 78 осуществляет разбиение анализируемой полосы частот на ряд примыкающих друг к другу участков осреднения по частоте, причем каждому из них соответствует отдельная спектральная выборка, а ширина этих участков определяет точность создания спектральными выборками формы нижнего края спектра. Квадраторы 79 служат для получения напряжений, величины которых пропорциональны мощности спектральных выборок. Ввиду случайного характера преобразованного дальномерного сигнала, с целью уменьшения флюктуационной составляющей погрешности при оценке мощностей спектральных выборок в анализаторе спектра применяется накопление сигнала (осреднение по времени) с помощью ФНЧ 80.
Аналоговые компараторы 81, входящие в состав обнаружителя сигнала (фиг. 4), представляют собой типовые устройства сравнения, в качестве которых может быть использована микросхема К521СА2, включаемая в зависимости от решаемой задачи таким образом, что напряжение на ее выходе, соответствующее логической "1", появляется лишь в случае, когда уровень сигнала на первом входе компаратора превысит опорный уровень напряжения, подаваемый на его второй вход, или станет меньше заданного опорного уровня. Путем установки соответствующих уровней опорных напряжений, поступающих на вторые входы компараторов 81 с выходов источника 82 опорных напряжений, состоящего из "N" потенциометров, подключенных к источнику высокостабильного постоянного напряжения питания схемы и выполняющих функции делителей этого напряжения, обнаружитель настраивается на определенную форму энергетического спектра. При попадании нижнего края спектра в середину анализируемой полосы на выходах всех компараторов 81 появляются логические "1", поступающие на "N" входовую схему И-НЕ 83, на выходе которой в этом случае формируется логический "0", являющийся сигналом об окончании поиска по дальности, который подается на вход первого БСФВП 17 (фиг.1). Отметим, что благодаря соответствующей настройке компараторов 81 уровень логической "1" на всех их выходах сохраняется при смещении анализируемого спектра с заданной формой нижнего края в пределах полосы дальномерных частот, соответствующей временному дискрету изменения положения гетеродинных ЛЧМ импульсов относительно дальномерных.
При смещении энергетического спектра преобразованного дальномерного сигнала по шкале частот на величину, превышающую ширину указанной полосы обнаружения или автосопровождения по частоте, а также при нахождении спектра вне пределов рабочей полосы частот анализатора спектра, что может быть при первоначальном поиске сигнала по дальности, на выходе одного или нескольких компараторов 81 появляется логический "0", а на выходе схемы И-НЕ 83 - логическая "1", которая с выхода первого БПД 16 поступает на вход первого БСФВП 17, обеспечивая продолжение режима поиска и захвата сигнала по дальности. Аналогично работает второй блок 41 поиска по дальности в составе ДПИ.
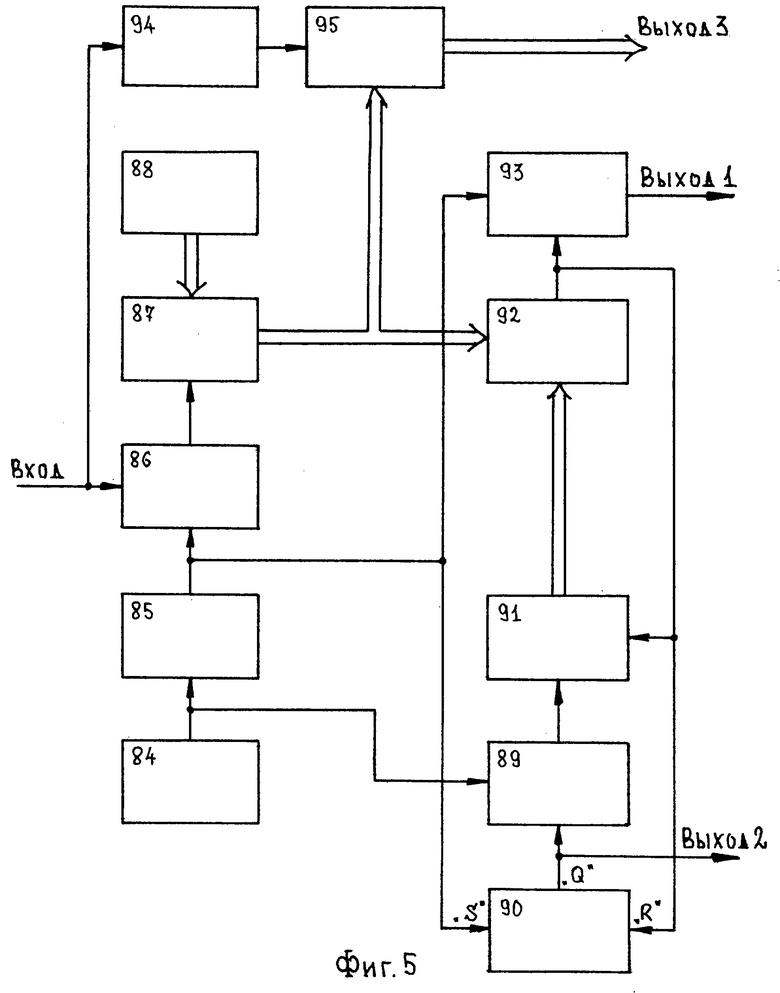
Рассмотрим пример реализации первого БСФВП 17, имеющего один вход и три выхода и включающего в себя (фиг.5): второй генератор 84 тактовых импульсов, делитель 85 частоты следования тактовых импульсов, первая схема И 86, счетчик 87 прогнозируемой дальности, регистр 88 кода минимальной дальности, вторая схема И 89, RS-триггер 90, быстродействующий счетчик 91, цифровой компаратор 92, схема ИЛИ 93, формирователь 94 короткого импульса и регистр 95 кода временной подставки.
При включении радиодальномера или при срыве автосопровождения в процессе измерения расстояния первый БСФВП 17 (фиг.1) работает в режиме поиска и захвата своего сигнала по дальности. При этом на один из входов первой схемы И 86 из первого БПД 16 (фиг.5) поступает логическая "1" и открывает ее, разрешая прохождение через первую схему И 86 на счетный вход счетчика 87 прогнозируемого расстояния в виде синхроимпульсов, определяющих моменты времени начала формирования ЛЧМ импульсов передатчика. Синхроимпульсы передатчика формируются путем деления в заданное число раз в блоке 85 делителя частоты повторения тактовых импульсов, генерируемых высокостабильным вторым опорным генератором 84. Период следования тактовых импульсов определяет величину временного дискрета Δtg изменения положения гетеродинных ЛЧМ импульсов.
При переходе РД в режим поиска по дальности, например при его включении, в счетчик 87 прогнозируемой дальности, со стороны установочного входа записывается код минимального расстояния, хранящийся в регистре 88. Таким образом, значение кода на выходе счетчика 87 будет возрастать на единицу, начиная с минимального нормированного значения, с приходом очередного синхроимпульса передатчика. Каждый из этих синхроимпульсов с выхода делителя 85 частоты поступает на S-вход RS-триггера 90 и устанавливает его выход "Q" в состояние логической "1", которая подается на один из входов второй схемы И 89 и открывает ее, разрешая прохождение на счетный вход быстродействующего счетчика 91 тактовых импульсов с выхода второго генератора 84. Код на выходе быстродействующего счетчика 91 по мере прихода на его счетный вход тактовых импульсов продолжает возрастать, поступая при этом на один из входов цифрового компаратора 92, и в некоторый момент времени, после прихода очередного тактового импульса сравнивается с кодом, поступающим на второй вход компаратора 92 с выхода счетчика 87 прогнозируемой дальности. В момент выравнивания на выходе компаратора 92 формируется короткий импульс, который в виде гетеродинного синхроимпульса через схему ИЛИ 93 поступает на запуск генератора ЛЧМ импульсов, обнуляет код на выходе быстродействующего счетчика 91, а также поступает на установочный вход RS-триггера 90, устанавливая его выход "Q" в состояние логического "0", который подается на первый вход второй схемы И 89, запрещая прохождение через нее тактовых импульсов на счетный вход счетчика 91. В результате этого на выходе RS-триггера 90 формируются управляющие строб-импульсы, которые поступают на вход второго ФЗГС 8 и используются там для их разделения во времени и по частоте. Синхроимпульсы передатчика с выхода делителя 85 частоты также поступают через схему ИЛИ 93 на запуск генератора ЛЧМ импульсов, причем для формирования коротких импульсов используется делитель 85 частоты.
При поступлении из первого блока 16 поиска по дальности на вход первого блока 17 синхронизации (фиг.1) сигнала обнаружения в виде логического "0" формирователь 94 по отрицательному перепаду напряжения на его входе генерирует короткий импульс, по которому в регистр 95 кода измеренной дальности или временной подставки заносится код с выхода счетчика 87 прогнозируемой дальности (фиг. 5). Одновременно первая схема И 86 из-за поступления на ее вход логического "0" закрывается и не пропускает на счетный вход счетчика 87 синхроимпульсы передатчика с выхода делителя 85 частоты. При этом РД переходит в режим автосопровождения по частоте в пределах дискрета изменения положения гетеродинных ЛЧМ импульсов относительно зондирующих. С выхода регистра 95 код, измеренный с точностью до временного дискрета Δtg дальности в виде временной подставки поступает на третий вход первого цифрового сумматора 13, где суммируется с кодами, поступающими с выходов осредняющих счетчиков 73 и 77 первого блока 12 прецизионных измерений, характеризующими остаточное запаздывание в пределах временного дискрета Δtg дальномерного сигнала относительно гетеродинного ЛЧМ импульса. В результате на выходе первого цифрового сумматора 13 в данный момент времени формируется прецизионное значение кода измеренной дальности. Для повышения качества работы РД целесообразно совместить второй генератор 84 тактовых импульсов с первым 1. Первый 17 и второй 42 БСФВП выполняют функции по обработке дальномерной информации, поэтому описанный блок во всех случаях работает по сокращенной программе, однако это не влияет на качество работы РД.
Таким образом, предложенный когерентный импульсный радиодальномер, использующий частотный метод измерения дальности, при помощи центрального (ведущей станции) и дополнительного пунктов измерений за счет параллельной обработки "N" индивидуальных дальномерных сигналов ведомых станций и их грубой пеленгации решает поставленную задачу и получает заданный технический результат - выполняет прецизионные измерения расстояния между произвольным (N) количеством подвижных объектов в реальном масштабе времени.
Алгоритм обработки дальномерной информации и выделения значения RО расстояния между произвольным подвижным объектом и ведущей станцией в данном РД дополнен по сравнению с прототипом [3] использованием частотных модемов в активных излучателях (ведомых станциях), повышающих помехоустойчивость и позволивших увеличить число объектов в системе. В структурной схеме предложенного РД появились два пеленгационных блока в составе ведущей станции (ЦПИ) и дополнительный пункт измерений, обеспечивающих прецизионное определение местоположения любого произвольного подвижного объекта на плоскости в реальном масштабе времени и состоящих из простых, типовых элементов, что, позволив решить поставленную задачу, незначительно усложнило схему всего РД, увеличив возможности его работы, но не повлияло на быстродействие, устойчивость, надежность и технологичность.
Пользуясь принципом построения данного радиодальномера на основе предложенного алгоритма обработки дальномерной информации, можно, используя бортовые радиовысотомеры самолетов, вертолетов и других летательных аппаратов, решить задачу прецизионного отслеживания их местоположения, превратив предложенную плоскостную дальномерную систему в пространственно-координатную.
Источники информации
1. Я. М. Костецкая, Свето- и радиодальномеры, Львов, "Вища Школа", 1986 г., стр. 35-36.
2. Там же, стр. 148-150.
3. Патент 2152053 (РФ) Радиодальномер / Д.И. Мировицкий, В.Л. Захаров, Л.Л. Захарова - заявлено 2 апреля 1999 г.
4. Радиоэлектронные системы / Основы построения и теория / Справочник под ред. Я.Д. Ширмана, М., ЗАО "МАКВИС", 1998 г., стр. 49-52.
5. Н. М. Царьков. Многоканальные радиолокационные измерители. М. : "Советское Радио", 1980 г., стр. 6-12.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОДАЛЬНОМЕР | 2000 |
|
RU2197000C2 |
| РАДИОДАЛЬНОМЕР | 1999 |
|
RU2152053C1 |
| РАДИОДАЛЬНОМЕР | 1999 |
|
RU2152052C1 |
| РАДИОВЫСОТОМЕР | 2001 |
|
RU2212684C1 |
| РАДИОВЫСОТОМЕР | 1995 |
|
RU2112250C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ПРОДУКТОПРОВОДОВ | 2007 |
|
RU2343499C1 |
| РАДИОДАЛЬНОМЕР | 2006 |
|
RU2325670C1 |
| РАДИОДАТЧИК | 2009 |
|
RU2419811C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ШИРОКОПОЛОСНОГО ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ПРИ ШИРОКОУГОЛЬНОМ ЭЛЕКТРОННОМ СКАНИРОВАНИИ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2021 |
|
RU2774156C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО | 2015 |
|
RU2599946C1 |
Радиодальномер относится к радиотехнике и предназначен для прецизионного определения расстояния между произвольным количеством подвижных объектов в любой момент времени. Техническим результатом изобретения является создание РД, выполняющего прецизионные измерения расстояния между произвольным количеством подвижных объектов в любой момент времени и расширение числа участников измерений без потери точности. Сущность изобретения заключается в том, что предложен РД, ведущая станция которого, получившая название центрального пункта измерений, содержит последовательное соединение первого генератора ЛЧМ импульсов, первого ФЗГС, первого усилителя, первого РБ, второй выход которого соединен с входом первого приемника и первой антенны, последовательное соединение первого смесителя, первого ПФ, первого БПД, первого БСФВП, третий выход которого соединен с третьим входом первого цифрового сумматора, каждая из "N" одинаковых ведомых станций содержит последовательное соединение четвертой антенны, второго РБ и четвертого приемника. 5 ил.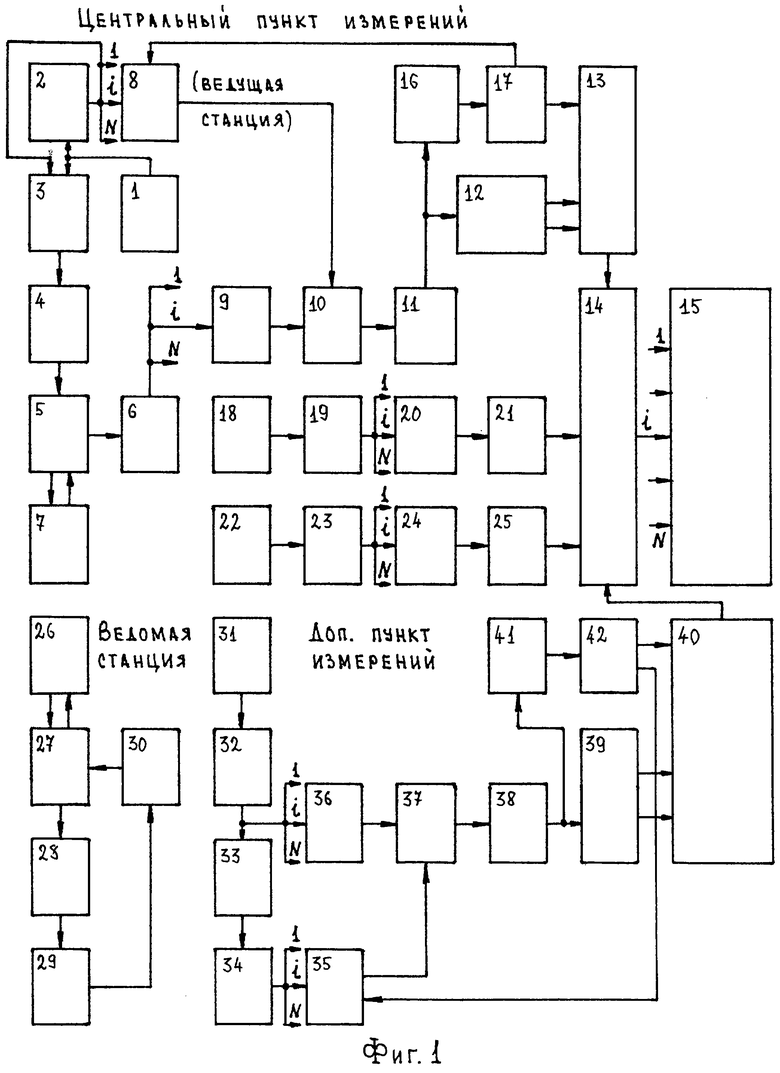
Радиодальномер, ведущая станция которого, получившая название центрального пункта измерений, содержит последовательное соединение первого генератора линейно-частотной модуляции импульсов, первого формирователя зондирующего и гетеродинного сигналов, первого усилителя, первого развязывающего блока, второй выход которого соединен с входом первого приемника, и первой антенны, последовательное соединение первого смесителя, первого полосового фильтра, первого блока поиска по дальности, первого блока синхронизации и формирования временной подставки, третий выход которого соединен с третьим входом первого цифрового сумматора, каждая из "N" одинаковых ведомых станций содержит последовательное соединение четвертой антенны, второго развязывающего блока и четвертого приемника, отличающийся тем, что в ведущую станцию дополнительно введены генератор тактовых импульсов, выход которого параллельно соединен как с входом первого генератора линейно-частотной модуляции импульсов, выход которого параллельно соединен с "N" вторыми формирователями зондирующего и гетеродинного сигналов, так и с вторым входом первого формирователя зондирующего и гетеродинного сигналов, выход первого приемника параллельно соединен с первыми "N" одинаковыми каналами обработки, каждый из которых содержит первый демодулятор, выход которого соединен с входом первого смесителя, второй вход которого соединен с вторым выходом второго формирователя зондирующего и гетеродинного сигналов из соответствующего "i" канала обработки, выход первого полосового фильтра соединен с входом первого блока прецизионных измерений, первый и второй выходы которого соответственно соединены с первым и вторым входами первого цифрового сумматора, последовательно соединенного с решающим устройством и электронной вычислительной машиной, которая в цифровой форме выдает информацию о расстоянии между произвольными подвижными объектами в любой момент времени, последовательное соединение второй антенны и второго приемника, выход которого параллельно соединен с вторыми "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение второго демодулятора и первого амплитудного детектора, выход которого соединен с вторым входом решающего устройства, последовательное соединение третьей антенны и третьего приемника, выход которого параллельно соединен с третьими "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение третьего демодулятора и второго амплитудного детектора, выход которого соединен с третьим входом решающего устройства, в ведомую станцию дополнительно введено последовательное соединение модулятора, вход которого соединен с выходом четвертого приемника, и второго усилителя, выход которого соединен с первым входом второго развязывающего блока, и введено дополнительное устройство - дополнительный пункт измерений, который содержит последовательное соединение пятой антенны, пятого приемника, второго полосового фильтра, второго генератора линейно-частотной модуляции импульсов, выход которого параллельно соединен с "N" третьими формирователями зондирующего и гетеродинного сигналов, выход пятого приемника параллельно соединен с четвертыми "N" одинаковыми каналами обработки, каждый из которых содержит последовательное соединение четвертого демодулятора, второго смесителя, второй вход которого соединен с выходом третьего формирователя зондирующего и гетеродинного сигналов из соответствующего "i" канала обработки и третьего полосового фильтра, выход которого параллельно соединен как с последовательным соединением второго блока прецизионных измерений, первый и второй выходы которого соответственно соединены с первым и вторым входами второго цифрового сумматора, и второго цифрового сумматора, так и с последовательным соединением второго блока поиска по дальности и второго блока синхронизации и формирования временной подставки, второй выход которого соединен с вторым входом третьего формирователя зондирующего и гетеродинного сигналов, а третий выход соединен с третьим входом второго цифрового сумматора, причем выход этого цифрового сумматора из дополнительного пункта измерений соединен с четвертым входом решающего устройства.
| РАДИОДАЛЬНОМЕР | 1999 |
|
RU2152053C1 |
| РАДИОДАЛЬНОМЕР | 1999 |
|
RU2152052C1 |
| US 5652589 A, 29.07.1997 | |||
| DE 3907296 A1, 20.09.1990 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |

