Изобретение относится к радиотехнике и может быть использовано для прецизионного определения высоты полета искусственного спутника Земли (ИСЗ), параметров гравитационного поля Земли, определения фигуры геоида, рельефа поверхности суши, топографии ледовых полей и океана, в частности высоты неровностей произвольной подстилающей поверхности и океанических волн.
Изобретение также может быть использовано при построении прецизионных дальномеров с существенно расширенной зоной измерений.
Известен спутниковый радиовысотомер (РВ) [1], работающий в режиме импульсного измерения высоты по времени задержки отраженных подстилающей поверхностью сигналов относительно зондирующих.
Известный радиовысотомер содержит передающее устройство, приемное устройство, временной модулятор, временной дискриминатор, сглаживающие цепи, индикатор и приемопередающие антенны, причем информация о высоте Н0 вырабатывается в индикаторе и пропорциональна половине разности временного положения стробирующих и отраженных радиоимпульсов.
Схема построения известного РВ за счет измерения временного положения огибающих отраженных радиоимпульсов имеет принципиально невысокую точность измерений.
Известен спутниковый радиовысотомер [2], работающий в режиме излучения радиоимпульсов с линейной частотной модуляцией (ЛЧМ), в котором измерение высоты Н0 сводится к определению положения инвариантной к высоте полета ИСЗ характерной точки fН0 половинной мощности на нижнем крае энергетического спектра преобразованного отраженного сигнала, образующегося в результате гетеродинирования принимаемого отраженного сигнала копией зондирующего ЛЧМ радиоимпульса, но смещенной относительно него по частоте на величину первой промежуточной частоты fпч1 приемного такта и совмещенной по времени с отраженным сигналом, а оценка высоты волн морской поверхности производится методом определения крутизны нижнего края этого спектра.
Известный РВ содержит дисперсионную линию задержки, передатчик, два гетеродина, блок разделения каналов, приемопередающую антенну, два смесителя, усилитель промежуточной частоты, аналого-цифровой преобразователь, блок цифровой автоматической регулировки, блок цифровых фильтров, причем его выход является одним из выходов устройства, выдающим в цифровой форме информацию о высоте волн, и адаптивное устройство слежения за высотой полета, выдающее в цифровой форме информацию о высоте Н0 полета ИСЗ.
Схема построения известного РВ, предусматривающая прецизионное измерение высоты полета ИСЗ в реальном масштабе времени на борту носителя над морской поверхностью, за счет ограниченности зоны однозначного отсчета высоты не позволяет получить таких измерений над ледовыми полями и материком.
Наиболее близким техническим решением к предлагаемому изобретению является спутниковый РВ [3], работающий в режиме излучения последовательностей радиоимпульсов с двойной ЛЧМ, в котором для измерения высоты полета Н0 используется двухшкальная измерительная система, основанная на определении инвариантной к высоте характерной точки fH0 половинной мощности на нижнем крае энергетического спектра преобразованного отраженного сигнала, образующегося в результате гетеродинирования принимаемого отраженного сигнала копией зондирующего ЛЧМ радиоимпульса, но смещенной относительно него по частоте на величину fпч1 первой промежуточной частоты приемного тракта и совмещенной по времени с отраженным сигналом, а оценка высоты НН неровностей произвольной подстилающей поверхности производится методом определения крутизны нижнего края этого спектра, причем каждая из измерительных шкал построена на основе обработки своего вида ЛЧМ.
Известный радиовысотомер содержит последовательное соединение генератора двойной ЛЧМ импульсов, формирователя зондирующего и гетеродинного сигналов (ФЗГС), усилителя, развязывающего блока (РБ) и антенны, к второму выходу РБ последовательно подключены первый смеситель, второй вход которого соединен с вторым выходом ФЗГС, приемник, блок поиска по дальности (БПД) и блок синхронизации и формирования временной подставки (БСФВП), первый выход которого соединен с входом генератора двойной ЛЧМ импульсов, второй выход - с вторым входом ФЗГС, а третий выход - с первым входом цифрового сумматора, к выходу генератора двойной ЛЧМ импульсов подключена первая линия задержки, к выходу которой параллельно подключены последовательное соединение первого перестраиваемого гетеродина и второго смесителя, последовательное соединение второй линии задержки, второго перестраиваемого гетеродина и третьего смесителя, к выходу приемника параллельно подключены последовательное соединение второго смесителя, четвертого смесителя и первого полосового фильтра (ПФ), последовательное соединение третьей линии задержки и третьего смесителя, выход которого соединен с вторым входом четвертого смесителя, к выходу первого ПФ параллельно подключены пятый и шестой смесители, к выходу пятого смесителя параллельно подключены последовательное соединение второго ПФ, первого квадратора, первого фильтра нижних частот (ФНЧ), первого сумматора, первого аттенюатора, второго аттенюатора, первого вычитателя и регулируемого усилителя, второй вход которого соединен с выходом генератора опорной частоты, и последовательное соединение третьего ПФ, второго квадратора, второго ФНЧ, второго сумматора, второго вычитателя, второй вход которого соединен с выходом первого аттенюатора, и третьего сумматора, второй вход которого соединен с выходом регулируемого усилителя, к выходу шестого смесителя параллельно подключены последовательное соединение четвертого ПФ, третьего квадратора, третьего ФНЧ, выход которого соединен с вторым входом второго сумматора, и третьего вычитателя, второй вход которого соединен с выходом второго ФНЧ, а выход - с вторым входом первого вычитателя, и последовательное соединение пятого ПФ, четвертого квадратора, четвертого ФНЧ, выход которого соединен с вторым входом первого сумматора, к выходу третьего сумматора параллельно подключены последовательное соединение первого амплитудного детектора (АД), пятого ФНЧ, третьего перестраиваемого гетеродина, выход которого соединен с вторым входом пятого смесителя, и первого усредняющего счетчика, выход которого соединен с вторым входом цифрового сумматора, и последовательное соединение второго АД, шестого ФНЧ, четвертого перестраиваемого гетеродина, выход которого соединен с вторым входом шестого смесителя, и второго усредняющего счетчика, выход которого соединен с третьим входом цифрового сумматора, к выходу четвертого смесителя последовательно подключены шестой ПФ, выход которого соединен с входом четвертой линии задержки, четвертый сумматор, второй вход которого соединен с выходом четвертой линии задержки, и седьмой смеситель, к выходу которого параллельно подключены последовательное соединение седьмого ПФ, пятого квадратора, седьмого ФНЧ, третьего аттенюатора, четвертого вычитателя, интегратора, пятого перестраиваемого гетеродина, выход которого соединен с вторым входом седьмого смесителя, и третьего усредняющего счетчика, выход которого соединен с четвертым входом цифрового сумматора, и последовательное соединение восьмого ПФ, шестого квадратора, восьмого ФНЧ, выход которого соединен с вторым входом четвертого вычитателя, причем выход цифрового сумматора является первым выходом РВ, выдающим в цифровой форме информацию о высоте Н0 полета носителя, а выход первого вычитателя является вторым выходом РВ, выдающим в аналоговой форме информацию о высоте НН неровностей поверхности.
Схема построения известного радиовысотомера за счет применения двойной ЛЧМ зондирующего сигнала значительно усложнилась.
Задачей настоящего изобретения является создание РВ, выполняющего прецизионные измерения высоты полета ИСЗ и высоты неровностей над произвольной подстилающей поверхностью на борту носителя в реальном масштабе времени.
Техническим результатом предложенного радиовысотомера является необходимое расширение зоны однозначности измерений без потери прецизионной точности в реальном масштабе времени при использовании устройства обработки высотомерной информации, которое выполнено на основе двух параллельных измерительных шкал отсчета высоты, причем в грубой используется фазовый метод измерений, а в точной - частотная обработка.
Технический результат достигается тем, что в РВ, который содержит последовательное соединение генератора ЛЧМ импульсов, ФЗГС, усилителя, РБ и антенны, последовательное соединение первого смесителя, первый вход которого соединен с вторым выходом РБ, а второй вход - с вторым выходом ФЗГС, приемника, БПД и БСФВП, первый выход которого соединен с входом генератора ЛЧМ импульсов, второй выход - с вторым входом ФЗГС, а третий выход - с первым входом цифрового сумматора, последовательное соединение второго смесителя, первый вход которого соединен с выходом приемника, ПФ, первого квадратора, первого ФНЧ, аттенюатора, первого вычитателя и второго ФНЧ, последовательное соединение второго квадратора, третьего ФНЧ и второго вычитателя, выход которого соединен с вторым входом первого вычитателя, последовательное соединение третьего квадратора, четвертого ФНЧ, выход которого соединен с вторым входом второго вычитателя, сумматора, второй вход которого соединен с выходом третьего ФНЧ, третьего вычитателя, второй вход которого соединен с выходом первого ФНЧ, пятого ФНЧ, перестраиваемого гетеродина, выход которого соединен с вторым входом второго смесителя, и усредняющего счетчика, выход которого соединен с вторым входом цифрового сумматора, последовательное соединение первого АД, вход которого соединен с выходом усилителя, и шестого ФНЧ, последовательное соединение второго АД, вход которого соединен с вторым выходом РБ, и седьмого ФНЧ, а также интегратор, причем выход цифрового сумматора является первым выходом РВ, выдающим в цифровой форме информацию о высоте Н0 полета носителя, а выход второго ФНЧ является вторым выходом РВ, выдающим в аналоговой форме информацию о высоте НН неровностей подстилающей поверхности, введены инвертор, вход которого соединен с выходом второго ФНЧ, первый перестраиваемый ПФ, первый вход которого соединен с выходом второго смесителя, второй вход - с выходом второго ФНЧ, а выход соединен с входом второго квадратора, второй перестраиваемый ПФ, первый вход которого соединен с выходом второго смесителя, второй вход - с выходом инвертора, а выход соединен с входом третьего квадратора, фазовый детектор (ФД), первый вход которого соединен с выходом шестого ФНЧ, второй вход - с выходом седьмого ФНЧ, а выход соединен с входом интегратора, и аналого-цифровой преобразователь, вход которого соединен с выходом интегратора, а выход - с третьим входом цифрового сумматора.
Общим для предлагаемого радиовысотомера с прототипом признаком является использование одинаковых типовых элементов структурной схемы, одинаково соединенных в цепи, таких как генератор ЛЧМ импульсов, ФЗГС, усилитель, РБ, антенна, приемник, БПД, БСФВП, два смесителя, ПФ, три квадратора, семь ФНЧ, сумматор, три вычитателя, аттенюатор, два АД, перестраиваемый гетеродин, осредняющий счетчик, интегратор и цифровой сумматор.
К отличиям предложенного радиовысотомера относится изменение его структурной схемы, заключающееся в появлении новых типовых элементов, таких как инвертор, два перестраиваемых полосовых фильтра, фазовый детектор и аналого-цифровой преобразователь.
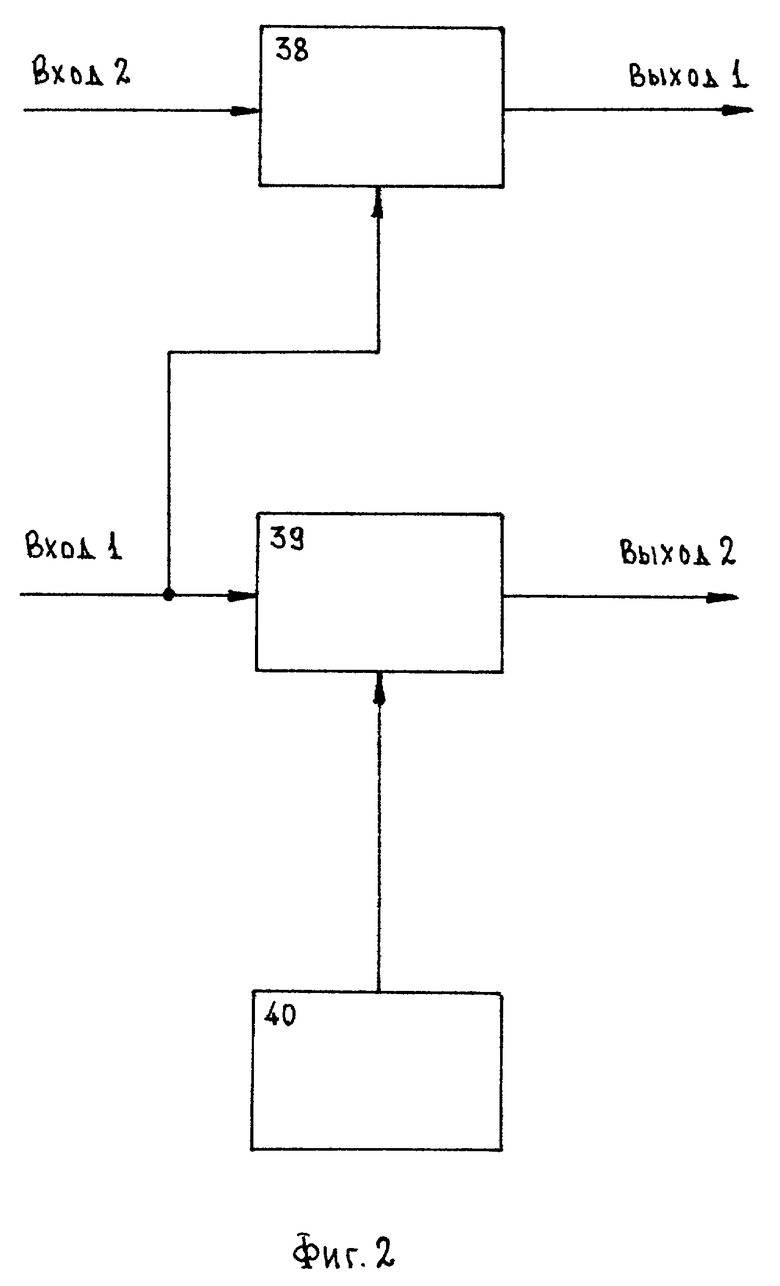
На фиг.1 изображена структурная схема предложенного радиовысотомера.
Радиовысотомер (фиг.1) содержит последовательное соединение генератора 1 ЛЧМ импульсов, формирователя 2 зондирующего и гетеродинного сигналов, усилителя 3, развязывающего блока 4 и антенны 5, последовательное соединение первого смесителя 6, первый вход которого соединен с вторым выходом РБ 4, а второй вход - с вторым выходом ФЗГС 2, приемника 7, блока 8 поиска по дальности и блока 9 синхронизации и формирования временной подставки, первый выход которого соединен с входом генератора 1 ЛЧМ импульсов, второй выход - с вторым входом ФЗГС 2, а третий выход - с первым входом цифрового сумматора 10, последовательное соединение второго смесителя 11, первый вход которого соединен с выходом приемника 7, полосового фильтра 12, первого квадратора 13, первого ФНЧ 14, аттенюатора 15, первого вычитателя 16 и второго ФНЧ 17, последовательное соединение второго квадратора 18, третьего ФНЧ 19 и второго вычитателя 20, выход которого соединен с вторым входом первого вычитателя 16, последовательное соединение третьего квадратора 21, четвертого ФНЧ 22, выход которого соединен с вторым входом второго вычитателя 20, сумматора 23, второй вход которого соединен с выходом третьего ФНЧ 19, третьего вычитателя 24, второй вход которого соединен с выходом первого ФНЧ 14, пятого ФНЧ 25, перестраиваемого гетеродина 26, выход которого соединен с вторым входом второго смесителя 11, и осредняющего счетчика 27, выход которого соединен с вторым входом цифрового сумматора 10, последовательное соединение первого АД 28, вход которого соединен с выходом усилителя 3, и шестого ФНЧ 29, последовательное соединение второго АД 30, вход которого соединен с вторым выходом РБ 4, и седьмого ФНЧ 31, а также интегратор 32, причем выход цифрового сумматора 10 является первым выходом радиовысотомера, выдающим в цифровой форме информацию о высоте Н0 полета носителя, а выход второго ФНЧ 17 является вторым выходом РВ, выдающим в аналоговой форме информацию о высоте НН неровностей подстилающей поверхности, инвертор 33, вход которого соединен с выходом второго ФНЧ 17, первый перестраиваемый ПФ 34, первый вход которого соединен с выходом второго смесителя 11, второй вход - с выходом второго ФНЧ 17, а выход соединен с входом второго квадратора 18, второй перестраиваемый ПФ 35, первый вход которого соединен с выходом второго смесителя 11, второй вход - с выходом инвертора 33, а выход соединен с входом третьего квадратора 21, ФД 36, первый вход которого соединен с выходом шестого ФНЧ 29, второй вход - с выходом седьмого ФНЧ 31, а выход соединен с входом интегратора 32, и аналого-цифровой преобразователь 37, вход которого соединен с выходом интегратора 32, а выход - с третьим входом цифрового сумматора 10.
Предложенный радиовысотомер работает следующим образом.
Блоки 1-10 (см. фиг.1) представляют собой блоки типового импульсного РВ с внутриимпульсной ЛЧМ используемого сигнала, достаточно полно описанного в [3] , в котором осуществляется демодуляция принимаемого отраженного сигнала методом его гетеродинирования аналогичной копией зондирующего сигнала, смещенной относительно него по частоте на величину первой промежуточной частоты приемного тракта и совмещенной по времени с отраженным сигналом. Генератор 1 ЛЧМ импульсов вырабатывает последовательность радиоимпульсов с заданными параметрами, а ФЗГС 2 под воздействием управляющего сигнала, поступающего с второго выхода БСФВП 9, производит селекцию поступающей с выхода генератора 1 ЛЧМ на его первый вход последовательности радиоимпульсов на зондирующие и гетеродинные сигналы. Этот зондирующий сигнал усиливается в усилителе 3, через РБ 4 поступает в антенну 5 и излучается. Отраженный подстилающей поверхностью ЛЧМ сигнал с такими же параметрами поступает через ту же антенну 5 и РБ 4 на первый вход первого смесителя 6, на второй вход которого поступает гетеродинный сигнал с второго выхода ФЗГС 2. С выхода первого смесителя 6 преобразованный отраженный сигнал поступает на вход приемника 7, где фильтруется, усиливается и поступает на вход БПД 8. Этот блок 8 обеспечивает первоначальный поиск, захват сигнала по высоте и совмещение по времени гетеродинного и отраженного сигналов, точно измеряя время задержки и выдавая в этом случае на БСФВП 9 сигнал об окончании поиска, который, используя импульсный характер сигналов, обеспечивает заданный временной режим работы РВ. Этот блок 9 вырабатывает две последовательности синхроимпульсов, имеющих одинаковый постоянный период повторения Тповт, причем вторая последовательность получается из первой путем задержки ее импульсов на время τ0, с точностью до временного дискрета Δtg, соответствующего запаздыванию отраженного сигнала. Измерение величины задержки происходит под воздействием управляющего сигнала, поступающего с выхода БПД 8. Полученное значение кода высоты ΔH0 по сигналу обнаружения от блока 8 в цифровой форме с третьего выхода БСФВП 9 поступает на первый вход цифрового сумматора 10 и используется в качестве временной подставки, которая с точностью, определяемой величиной дискрета Δtg измерения задержки, соответствует измеряемой высоте полета Н0.
В предложенном РВ заданную прецизионную точность и необходимое расширение зоны однозначности измерений в реальном масштабе времени обеспечивает устройство обработки высотомерной информации, которое выполнено на основе двух параллельных измерительных шкал отсчета высоты, причем в грубой используется фазовый метод измерений, а в точной - частотная обработка. Грубая измерительная шкала, устраняющая неоднозначность отсчета высоты при расширении зоны до заданного значения, построена на сравнении фаз огибающих отраженного и зондирующего сигналов. Прецизионное уточнение высоты полета в пределах ограниченной зоны однозначности выполняется точной измерительной шкалой на основе суммарно-разностной обработки амплитуд трех заданным образом разнесенных по частоте выборок на нижнем крае энергетического спектра преобразованного отраженного сигнала. Методика выбора параметров измерительных шкал многошкального РВ изложена в [4], причем следует отметить, что все шкалы работают параллельно и независимо друг от друга.
Точная частотная шкала отсчета высоты устройства обработки высотомерной информации производит прецизионные измерения высоты полета Н0 в реальном масштабе времени на борту носителя, которые сводятся к определению положения на шкале частот инвариантной к характеру произвольной поверхности характерной точки fH0 половинной мощности на нижнем крае энергетического спектра преобразованного отраженного сигнала, образующегося в результате гетеродинирования принимаемого отраженного сигнала копией зондирующего ЛЧМ радиоимпульса, смещенной относительно него по частоте на величину первой промежуточной частоты приемного тракта и совмещенной с ним по времени в пределах полосы частот, равной удвоенной величины дискрета измерения задержки грубой фазовой шкалой устройства, а оценка высоты НH неровностей произвольной подстилающей поверхности производится методом определения крутизны нижнего края этого спектра. Идентификация данной характерной точки fH0, в этом случае, основана на том, что сумма мощностей спектральных составляющих, лежащих в пределах нижнего края этого спектра и расположенных симметрично относительно него, в силу того, что нижний край энергетического спектра описывается интегральным Гауссовым законом [2], есть величина постоянная и равная мощности произвольной составляющей, соответствующей плоской вершине этого спектра. Эту обработку выполняет двухканальная измерительная система, причем фильтрующая часть канала измерения высоты полета построена по принципу "следящего гетеродина", а канала измерения высоты неровностей - по принципу "следящего фильтра". Значения центральных частот всех выборок определяются величиной амплитуд этих выборок, причем частоте fH0 соответствует амплитуда Aо, которая выбирается из условия A2 0=0,5А2 max, частоте f1 соответствует выражение для амплитуд A2 1= 0,2А2 max, a f2 - соотношение A2 2=0,8А2 max, где Аmах - максимальное значение плоской вершины спектра сигнала на частоте f0.
Спектр преобразованного отраженного сигнала, поступающий с выхода приемника 7 (см. фиг.1), переносится вторым смесителем 11 в область промежуточной частоты fпч1 и далее тремя ПФ 12, 34 и 35, частоты настройки которых соответственно равны f0, f1 и f2, осуществляется одновременное параллельное частотное стробирование трех участков этого спектра в окрестности его нижнего края. Для оценки энергии стробируемых спектральных составляющих на выходе ПФ соответственно включены квадраторы 13, 18 и 21 и осредняющие устройства 14, 19 и 22 - ФНЧ. С выходов третьего 19 и четвертого 22 ФНЧ сигналы, определяющие энергию спектральных составляющих первого и второго стробируемых участков, расположенных симметрично относительно характерной точки fн0 половинной мощности на нижнем крае энергетического спектра, поступают на входы сумматора 23, последовательно соединенного с третьим вычитателем 24, на второй вход которого с выхода первого ФНЧ 14 подается опорный сигнал, соответствующий энергии спектральной составляющей третьего стробируемого участка, расположенного на плоской вершине этого спектра. Результат сравнения осредняется пятым ФНЧ 25 и подается на управляющий вход перестраиваемого гетеродина 26, подстраивая канал измерения высоты полета носителя на заданную рабочую частоту, при этом точное значение частоты характерной точки fн0, соответствущее высоте полета Н0, пропорционально текущему значению частоты перестраиваемого гетеродина 26. Для получения численного значения добавки  сигнал с выхода этого гетеродина 26 подается через осредняющий счетчик 27 на второй вход цифрового сумматора 10, где складывается со значением кода временной подставки с третьего выхода БСФВП 9. Одновременно сигналы с выходов третьего 19 и четвертого 22 ФНЧ поступают на входы второго вычитателя 20, где формируется аналоговый сигнал, пропорциональный расстоянию между первым и вторым стробируемыми участками на шкале частот. В первом вычитателе 16 этот сигнал сравнивается с опорным сигналом третьего стробируемого участка с выхода первого ФНЧ 14, ослабленного аттенюатором 15 до заданной величины, осредняется вторым ФНЧ 17 и используется для управления первым 34 и вторым 35 через инвертор 33 перестраиваемыми ПФ, подстраивая канал измерения высоты неровностей подстилающей поверхности так, чтобы обеспечить симметричность расположения первого и второго стробируемых участков спектра относительно характерной точки fH0. Сигнал с выхода второго ФНЧ 17, управляющий работой первого перестраиваемого ПФ 34, в этом случае, будет пропорционален крутизне нижнего края энергетического спектра, т.е. пропорционален высоте неровностей НH. Учитывая симметричность, управляющий сигнал для второго перестраиваемого ПФ 35 формируется в инверторе 33 поворотом сигнала управления первым перестраиваемым ПФ 34 на 180o. Выход второго ФНЧ 17 является вторым выходом РВ, выдающим в аналоговой форме информацию о высоте НH неровностей.
сигнал с выхода этого гетеродина 26 подается через осредняющий счетчик 27 на второй вход цифрового сумматора 10, где складывается со значением кода временной подставки с третьего выхода БСФВП 9. Одновременно сигналы с выходов третьего 19 и четвертого 22 ФНЧ поступают на входы второго вычитателя 20, где формируется аналоговый сигнал, пропорциональный расстоянию между первым и вторым стробируемыми участками на шкале частот. В первом вычитателе 16 этот сигнал сравнивается с опорным сигналом третьего стробируемого участка с выхода первого ФНЧ 14, ослабленного аттенюатором 15 до заданной величины, осредняется вторым ФНЧ 17 и используется для управления первым 34 и вторым 35 через инвертор 33 перестраиваемыми ПФ, подстраивая канал измерения высоты неровностей подстилающей поверхности так, чтобы обеспечить симметричность расположения первого и второго стробируемых участков спектра относительно характерной точки fH0. Сигнал с выхода второго ФНЧ 17, управляющий работой первого перестраиваемого ПФ 34, в этом случае, будет пропорционален крутизне нижнего края энергетического спектра, т.е. пропорционален высоте неровностей НH. Учитывая симметричность, управляющий сигнал для второго перестраиваемого ПФ 35 формируется в инверторе 33 поворотом сигнала управления первым перестраиваемым ПФ 34 на 180o. Выход второго ФНЧ 17 является вторым выходом РВ, выдающим в аналоговой форме информацию о высоте НH неровностей.
Расширение зоны однозначного отсчета высоты полета на борту носителя в предлагаемом РВ реализовано добавлением, построенным на сравнении фаз огибающих зондирующего и отраженного сигналов, грубой измерительной шкалы устройства обработки высотомерной информации, которая в заданном диапазоне измерений высоты обеспечивает измерения с более низкой точностью в соответствии с методикой, которая изложена в [4].
Сформированный зондирующий сигнал с выхода усилителя 3 поступает на первый детектор огибающей, состоящий из последовательного соединения первого АД 28 и шестого ФНЧ 29, выход которого соединен с первым входом ФД 36. Поступивший отраженный сигнал с второго выхода РБ 4 поступает на второй детектор огибающей, состоящий из последовательного соединения второго АД 30 и седьмого ФНЧ 31, выход которого соединен с вторым входом ФД 36. Этот детектор 36, сравнивая фазы огибающих зондирующего и отраженного сигналов, формирует на выходе аналоговый сигнал, пропорциональный этой разнице, которая пропорциональна времени запаздывания, т.е. высоте полета носителя Н0. Для получения численного значения добавки  сигнал с выхода ФД 36 осредняется интегратором 32 и аналого-цифровым преобразователем 37 преобразуется в цифровую форму, далее он поступает на третий вход цифрового сумматора 10. Таким образом выходной информацией цифрового сумматора 10 является полное прецизионное значение измеряемой высоты полета носителя Н0 в виде многоразрядного цифрового кода.
сигнал с выхода ФД 36 осредняется интегратором 32 и аналого-цифровым преобразователем 37 преобразуется в цифровую форму, далее он поступает на третий вход цифрового сумматора 10. Таким образом выходной информацией цифрового сумматора 10 является полное прецизионное значение измеряемой высоты полета носителя Н0 в виде многоразрядного цифрового кода.
К приведенному описанию заявляемого радиовысотомера со ссылками на позиции его структурной схемы (фиг.1) даем примеры реализации хорошо известных блоков, используемых в данном РВ.
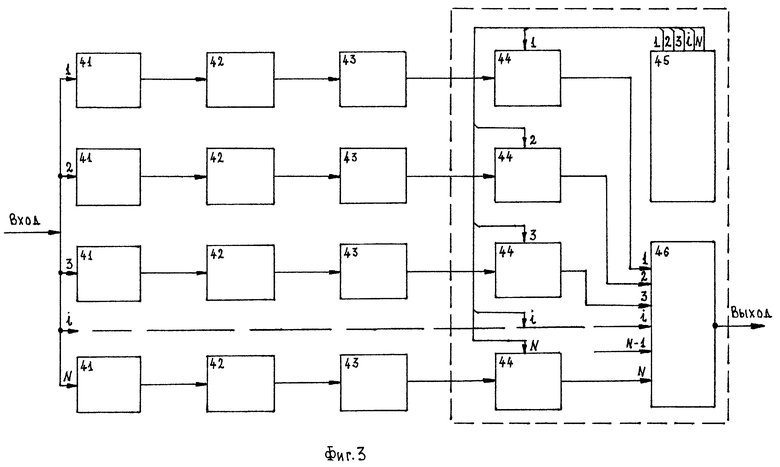
Вариант структурной схемы второго формирователя 2 зондирующего и гетеродинного сигналов, имеющего два входа и два выхода, представлен на фиг.2. Первый вход этого ФЗГС 2 соединен с выходом первого генератора 1 ЛЧМ импульсов (фиг. 1), сигнал от которого подается на вход аналогового ключа 38 и на один из входов балансного смесителя 39, на второй вход которого подан сигнал со стабилизированного генератора 40 опорной частоты, при этом несущая частота зондирующего ЛЧМ импульса сдвигается на величину, равную номинальному значению первой промежуточной частоты обработки fпч1. Второй вход ФЗГС 2 соединен с вторым выходом БСФВП 9, сигнал с второго выхода которого подается на управляющий вход аналогового ключа 38, задавая временной режим его работы. Первый выход ФЗГС 2, служащий выходом сформированного зондирующего сигнала, соединен с входом усилителя 3, а второй выход, служащий выходом опорного гетеродинного сигнала, соединен с вторым входом первого смесителя 6 (фиг.1).
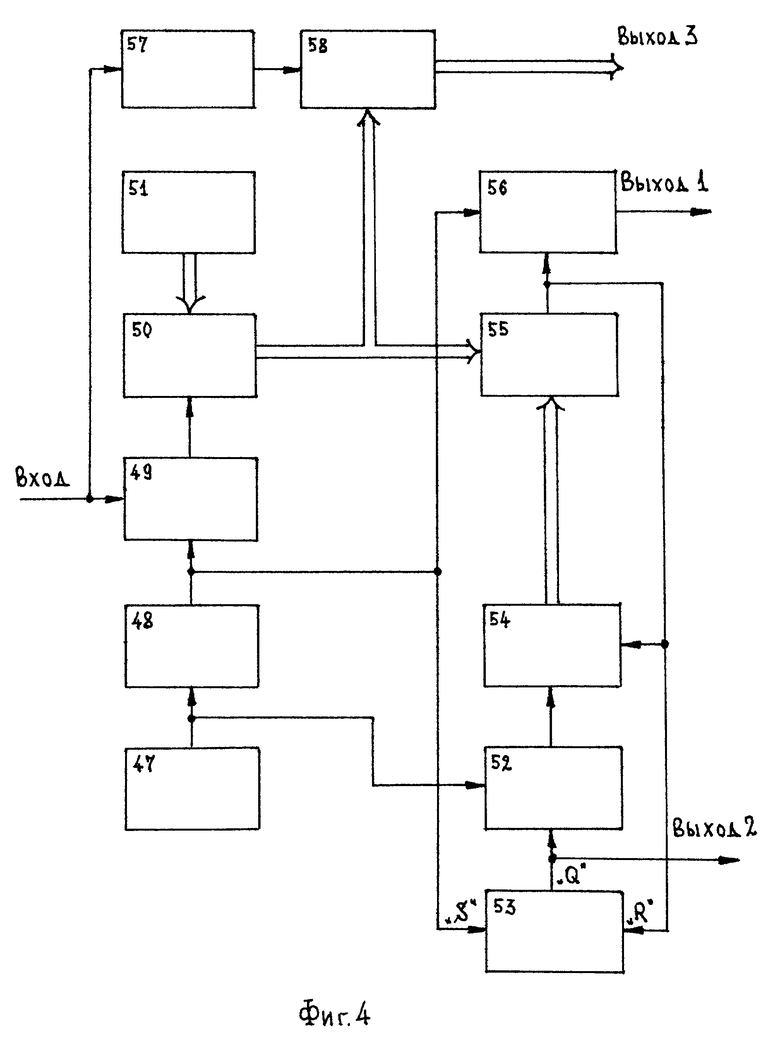
Вариант структурной схемы блока 8 поиска по дальности типового импульсного когерентного РВ, имеющего один вход и один выход, представлен на фиг. 3. Данный блок представляет собой N-канальный параллельный анализатор спектра [5] с включенным на его выходе обнаружителем сигнала или устройством принятия решения, который обведен на фиг.3 штрих-пунктирной линией. Каждый канал анализатора спектра содержит ПФ 41, амплитудно-частотная характеристика (АЧХ) которого перекрывается с АЧХ ПФ соседнего канала по уровню 0,707, квадратор 42 и ФНЧ 43 в качестве накопителя сигналов. В составе обнаружителя сигнала входят аналоговые компараторы 44, источник 45 опорных напряжений и N-входовая схема И-НЕ 46.
Работа БПД 8 (фиг.1) совместно с БСФВП 17 происходит следующим образом - с выхода приемника 7 на вход БПД 8, являющегося анализатором спектра, поступает преобразованный отраженный подстилающей поверхностью сигнал, для которого производится оценка формы его энергетического спектра, получаемого в виде спектральных выборок (отсчетов), амплитуда которых пропорциональна их мощности, а также оценка положения спектра на шкале дальномерных частот. При этом ПФ 41 осуществляет разбиение анализируемой полосы частот на ряд примыкающих друг к другу участков осреднения по частоте, причем каждому из них соответствует отдельная спектральная выборка, а ширина этих участков определяет точность создания спектральными выборками формы нижнего края спектра. Квадраторы 42 служат для получения напряжений, величины которых пропорциональны мощности спектральных выборок. Ввиду случайного характера преобразованного отраженного сигнала, с целью уменьшения флюктуационной составляющей погрешности при оценке мощностей спектральных выборок, в анализаторе спектра применяется накопление сигнала (осреднение по времени) с помощью ФНЧ 43. Аналоговые компараторы 44, входящие в состав обнаружителя сигнала (фиг.3), представляют собой типовые устройства сравнения, в качестве которых может быть использована микросхема К521СА2, включаемая в зависимости от решаемой задачи таким образом, что напряжение на ее выходе, соответствующее логической 1, появляется лишь в случае, когда уровень сигнала на первом входе компаратора превысит опорный уровень напряжения, подаваемый на его второй вход, или станет меньше заданного опорного уровня. Путем установки соответствующих уровней опорных напряжений, поступающих на вторые входы компараторов 44 с выходов источника 45 опорных напряжений, состоящего из N-потенциометров, подключенных к источнику высокостабильного постоянного напряжения питания схемы и выполняющих функции делителей этого напряжения, обнаружитель настраивается на определенную форму энергетического спектра, например, описанную в [2] . При попадании нижнего края спектра в середину анализируемой полосы частот, перекрываемой ПФ 41 анализатора спектра, на выходах всех компараторов 44 появляются логические 1, поступающие на N-входовую схему И-НЕ 46, на выходе которой в этом случае формируется логический 0, являющийся сигналом об окончании поиска по высоте, который подается на вход БСФВП 9 (фиг.1). Отметим, что благодаря соответствующей настройке компараторов 44 уровень логической 1 на всех их выходах сохраняется при смещении анализируемого спектра с заданной формой нижнего края в пределах полосы дальномерных частот, соответствующей временному дискрету Δtg изменения положения гетеродинных ЛЧМ импульсов относительно зондирующих. При смещении энергетического спектра преобразованного дальномерного сигнала по шкале частот на величину, превышающую ширину указанной полосы обнаружения или автосопровождения по частоте, а также при нахождении спектра вне пределов рабочей полосы частот анализатора спектра, что может быть при первоначальном поиске сигнала по дальности, на выходе одного или нескольких компараторов 44 появляется логический 0, а на выходе схемы И-НЕ 46 - логическая 1, которая с выхода БПД 8 поступает на вход БСФВП 9, обеспечивая продолжение режима поиска и захвата сигнала по дальности.
Вариант структурной схемы блока 9 синхронизации и формирования временной подставки, имеющего один вход и три выхода, представлен на фиг.4. БСФВП 9 включает в себя: генератор 47 тактовых импульсов, делитель 48 частоты следования тактовых импульсов, первую схему И 49, счетчик 50 прогнозируемой высоты полета, регистр 51 кода минимальной высоты, вторую схему И 52, RS-триггер 53, быстродействующий счетчик 54, цифровой компаратор 55, схему ИЛИ 56, формирователь 57 короткого импульса и регистр 58 кода временной подставки.
При включении радиовысотомера или при срыве автосопровождения в процессе измерения высоты полета БСФВП 9 (фиг.1) работает в режиме поиска и захвата сигнала по дальности. При этом на один из входов первой схемы И 49 из БПД (фиг. 4) поступает логическая 1 и открывает ее, разрешая прохождение через эту схему И 49 на счетный вход счетчика 50 прогнозируемой высоты в виде синхроимпульсов, определяющих моменты времени начала формирования ЛЧМ импульсов передатчика. Синхроимпульсы передатчика формируются путем деления в заданное число раз в блоке 48 делителя частоты повторения тактовых импульсов, генерируемых высокостабильным генератором 47. Период следования тактовых импульсов определяет величину временного дискрета Δtg изменения положения гетеродинных ЛЧМ импульсов. При переходе РВ в режим поиска по дальности, например, при его включении в счетчик 50 прогнозируемой высоты со стороны установочного входа записывается код минимальной высоты полета ИСЗ, хранящийся в регистре 51. Таким образом, значение кода на выходе счетчика 50 будет возрастать на единицу, начиная с минимального нормированного значения, с приходом очередного синхроимпульса передатчика. Каждый из этих синхроимпульсов с выхода делителя 48 частоты поступает на S-вход RS-триггера 53 и устанавливает его выход Q в состояние логической 1, которая подается на один из входов второй схемы И 52 и открывает ее, разрешая прохождение на счетный вход быстродействующего счетчика 54 тактовых импульсов с выхода генератора 47. Код на выходе быстродействующего счетчика 54 по мере прихода на его счетный вход тактовых импульсов продолжает возрастать, поступая при этом на один из входов цифрового компаратора 55, и в некоторый момент времени, после прихода очередного тактового импульса, сравнивается с кодом, поступающим на второй вход компаратора 55 с выхода счетчика 50 прогнозируемой высоты полета. В момент выравнивания на выходе компаратора 55 формируется короткий импульс, который в виде гетеродинного синхроимпульса через схему ИЛИ 56 поступает на запуск генератора ЛЧМ импульсов, обнуляет код на выходе быстродействующего счетчика 54, а также поступает на установочный вход RS-триггера 53, устанавливая его выход Q в состояние логического 0, который подается на первый вход второй схемы И 52, запрещая прохождение через нее тактовых импульсов на счетный вход счетчика 54. В результате этого на выходе RS-триггера 53 формируются управляющие строб-импульсы, которые поступают на вход ФЗГС 2 и используются там для их разделения во времени и по частоте. Синхроимпульсы передатчика с выхода делителя 48 частоты также поступают через схему ИЛИ 56 на запуск генератора ЛЧМ импульсов, причем для формирования коротких импульсов используется делитель 48 частоты. При поступлении из БПД 8 на вход БСФВП 9 (фиг. 1) сигнала обнаружения в виде логического 0 формирователь 57 по отрицательному перепаду напряжения на его входе генерирует короткий импульс, по которому в регистр 58 кода измеренной высоты заносится код с выхода счетчика 50 прогнозируемой высоты (фиг.4). Одновременно первая схема И 49 из-за поступления на ее вход логического 0 закрывается и не пропускает на счетный вход счетчика 50 синхроимпульсы передатчика с выхода делителя 48 частоты. При этом РВ переходит в режим автосопровождения по частоте в пределах дискрета Δtg изменения положения гетеродинных ЛЧМ импульсов относительно зондирующих. С выхода регистра 58 код, измеренный с точностью до временного дискрета Δtg высоты полета, в виде временной подставки поступает на третий вход цифрового сумматора 10, где суммируется с кодами, поступающими с выходов осредняющего счетчика 27, измеряющего частоту перестраиваемого гетеродина 26, и аналого-цифрового преобразователя 37 (фиг.1), характеризующими остаточное запаздывание в пределах временного дискрета Δtg отраженного сигнала относительно гетеродинного ЛЧМ импульса. В результате на выходе цифрового сумматора 10 в данный момент времени формируется прецизионное значение кода измеренной высоты полета Н0. В процессе автосопровождения диапазон перестройки частоты Δfуг гетеродина 26 определяется временным дискретом Δtg изменения положения гетеродинного ЛЧМ импульса относительно зондирующего в соответствии с формулой Δfуг = γxΔtg, где γ - скорость изменения частоты в ЛЧМ радиоимпульсе.
Вход БСФВП 9 (фиг.1), на который подаются управляющие сигналы, соединен с выходом БПД 8, первый выход БСФВП 9, на котором сформированы синхроимпульсы запуска, соединен с входом генератора 1 ЛЧМ импульсов, второй выход БСФВП 9, на котором сформированы управляющие строб-импульсы, соединен с вторым входом ФЗГС 2, а третий выход БСФВП 9, на котором сформирован код измеренной с точностью до временного дискрета Δtg высоты полета ΔH0 в виде временной подставки, соединен с первым входом цифрового сумматора 10.
Таким образом предложенный когерентный импульсный радиовысотомер, использующий устройство обработки высотомерной информации, которое выполнено на основе двух параллельных измерительных шкал отсчета высоты, причем в грубой используется фазовый метод измерений, а в точной - частотная обработка, решает поставленную задачу и получает заданный технический результат - выполняет прецизионные измерения высоты Н0 полета ИСЗ и высоты Нн неровностей над произвольной подстилающей поверхностью на борту носителя в реальном масштабе времени.
Алгоритм обработки высотомерной информации и выделения высоты Н0 полета носителя в данном РВ по сравнению с прототипом изменен для грубой измерительной шкалы, которая теперь построена на основе фазового метода измерений. Это позволило применить простую (одиночную) ЛЧМ зондирующего сигнала, что значительно упростило структурную схему предложенного РВ, повысив качество его работы, но не повлияло на быстродействие, устойчивость, надежность и технологичность, т.к. в ней используются простые типовые элементы.
Пользуясь принципом построения данного РВ на основе предложенного алгоритма обработки полезной информации, можно разрабатывать любые типы прецизионных радиодальномеров, требующих существенного расширения зоны однозначности измерений.
Источники информации
1. Жуковский А.П., Оноприенко Е.И., Чижов В.И. Теоретические основы радиовысотометрии. /Под ред. А.П. Жуковского, М., Советское Радио, 1979 г., с. 228.
2. Виницкий А.С. Автономные радиосистемы. М., Радио и Связь, 1986 г., с. 297-299.
3. Патент N 2112250 (РФ) - Радиовысотомер/ В.Л. Захаров, Ю.М. Фатьянов, Л.Л. Захарова, К.В. Рослов - заявлено 10 апреля 1995 г.
4. Захаров В.Л. Выбор параметров многошкальных прецизионных ОРВ. - Радиотехника, 1994 г., 6, с.44-49.
5. Воллернер Н.Ф. Аппаратурный спектральный анализ сигналов. М., Советское Радио, 1977 г., с.93-95.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОВЫСОТОМЕР | 1995 |
|
RU2112250C1 |
| РАДИОДАЛЬНОМЕР | 1999 |
|
RU2152053C1 |
| РАДИОДАЛЬНОМЕР | 1999 |
|
RU2152052C1 |
| РАДИОДАЛЬНОМЕР | 2000 |
|
RU2197000C2 |
| РАДИОДАЛЬНОМЕР | 2000 |
|
RU2197001C2 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ПРОДУКТОПРОВОДОВ | 2007 |
|
RU2343499C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2016 |
|
RU2625567C1 |
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2018 |
|
RU2676469C1 |
| ЦИФРОВАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2015 |
|
RU2608637C1 |
Изобретение относится к радиотехнике и предназначено для прецизионного определения высоты полета ИСЗ, параметров гравитационного поля Земли, определения фигуры геоида, рельефа поверхности суши, топографии ледовых полей и океана, в частности высоты неровностей подстилающей поверхности и океанических волн. Радиовысотомер содержит генератор ЛЧМ импульсов, формирователь зондирующего и гетеродинного сигналов, усилитель, развязывающий блок, антенну, два смесителя, приемник, блок поиска по дальности, блок синхронизации и формирования временной подставки, цифровой сумматор, полосовой фильтр (ПФ), три квадратора, семь ФНЧ, аттенюатор, три вычитателя, сумматор, перестраиваемый гетеродин, осредняющий счетчик, два амплитудных детектора, интегратор, инвертор, два перестраиваемых ПФ, фазовый детектор, аналого-цифровой преобразователь. Достигаемым техническим результатом изобретения является необходимое расширение зоны однозначности измерений без потери прецизионной точности в реальном масштабе времени. 4 ил.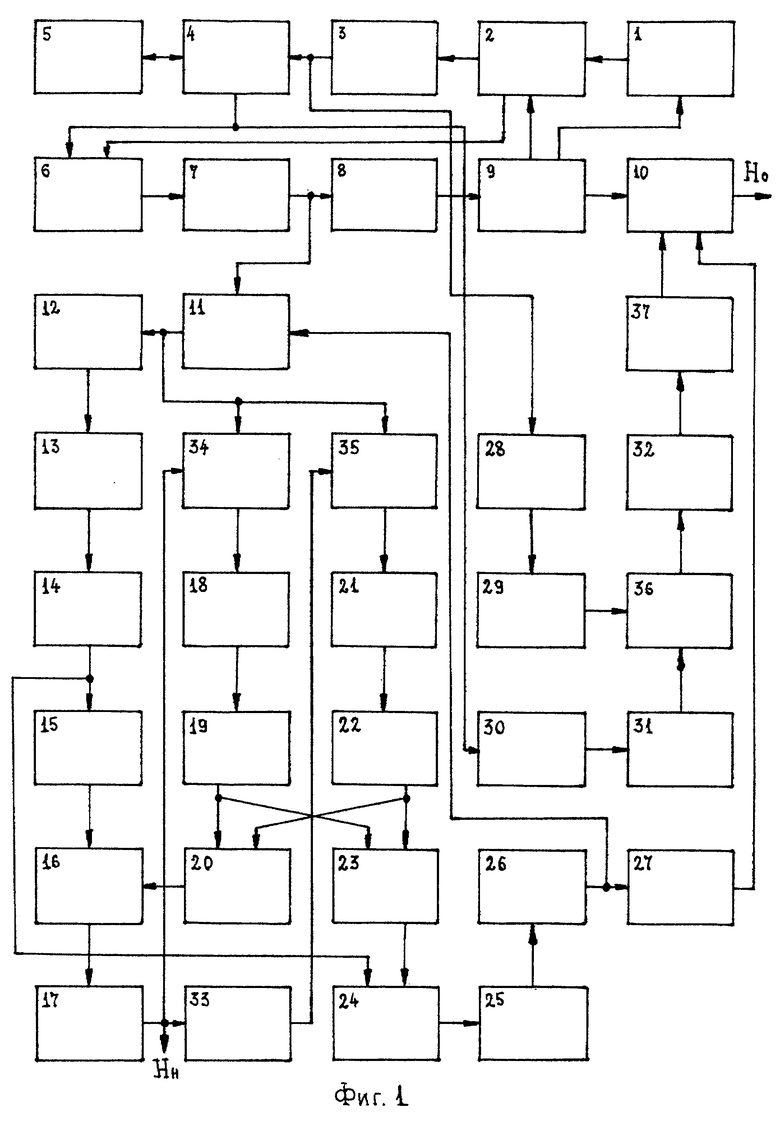
Радиовысотомер содержит последовательное соединение генератора линейно-частотной модуляции импульсов, формирователя зондирующего и гетеродинного сигналов, усилителя, развязывающего блока и антенны, последовательное соединение первого смесителя, первый вход которого соединен с вторым выходом развязывающего блока, а второй вход - с вторым выходом формирователя зондирующего и гетеродинного сигналов, приемника, блока поиска по дальности и блока синхронизации и формирования временной подставки, первый выход которого соединен с входом генератора линейно-частотной модуляции импульсов, второй выход - с вторым входом формирователя зондирующего и гетеродинного сигналов, а третий выход - с первым входом цифрового сумматора, последовательное соединение второго смесителя, первый вход которого соединен с выходом приемника, полосового фильтра, первого квадратора, первого фильтра нижних частот аттенюатора, первого вычитателя и второго фильтра нижних частот, последовательное соединение второго квадратора, третьего фильтра нижних частот и второго вычитателя, выход которого соединен с вторым входом первого вычитателя, последовательное соединение третьего квадратора, четвертого фильтра нижних частот, выход которого соединен с вторым входом второго вычитателя, сумматора, второй вход которого соединен с выходом третьего фильтра нижних частот, третьего вычитателя, второй вход которого соединен с выходом первого фильтра нижних частот, пятого фильтра нижних частот, перестраиваемого гетеродина, выход которого соединен с вторым входом второго смесителя, и осредняющего счетчика, выход которого соединен с вторым входом цифрового сумматора, последовательное соединение первого амплитудного детектора, вход которого соединен с выходом усилителя, и шестого фильтра нижних частот, последовательное соединение второго амплитудного детектора, вход которого соединен с вторым выходом развязывающего блока, и седьмого фильтра нижних частот, а также интегратор, причем выход цифрового сумматора является первым выходом радиовысотомера, выдающим в цифровой форме информацию о высоте полета носителя, а выход второго фильтра нижних частот является вторым выходом радиовысотомера, выдающим в аналоговой форме информацию о высоте неровностей произвольной подстилающей поверхности, отличающийся тем, что введены инвертор, вход которого соединен с выходом второго фильтра нижних частот, первый перестраиваемый полосовой фильтр, первый вход которого соединен с выходом второго смесителя, второй вход - с выходом второго фильтра нижних частот, а выход соединен с входом второго квадратора, второй перестраиваемый полосовой фильтр, первый вход которого соединен с выходом второго смесителя, второй вход - с выходом инвертора, а выход соединен с входом третьего квадратора, фазовый детектор, первый вход которого соединен с выходом шестого фильтра нижних частот, второй вход - с выходом седьмого фильтра нижних частот, а выход соединен с входом интегратора, и аналого-цифровой преобразователь, вход которого соединен с выходом интегратора, а выход - с третьим входом цифрового сумматора.
| РАДИОВЫСОТОМЕР | 1995 |
|
RU2112250C1 |
| РАДИОВЫСОТОМЕР С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2030762C1 |
| Радиовысотомер с частотной модуляцией | 1975 |
|
SU564612A1 |
| US 5719581, 17.02.1998 | |||
| СПОСОБ ПОЛУЧЕНИЯ ТИОНАФТЕН- | 0 |
|
SU169127A1 |

