Предлагаемый радиодальномер относится к радиолокационной измерительной технике и предназначен, главным образом, для решения проблем, связанных с необходимостью однозначного измерения малых и сверхмалых расстояний, исчисляемых от нескольких метров до долей метра (Примечание: под малыми и сверхмалыми мы будем понимать расстояния, соизмеримые с разрешающей способностью радиосигнала по дальности).
Требование однозначного измерения дальности в непосредственной близости от относительно перемещающихся объектов (целей) возникает во многих практических случаях. Так, например, такое измерение необходимо на заключительных стадиях управления движением кратковременно взаимодействующих объектов при встрече авиационно-космических объектов с целью стыковки, аварийной помощи, управления механизмом самого объекта для достижения конечной цели - приведения в рабочее состояние стыковочных устройств, запуска тормозных двигателей, выдачи команд в систему телеметрии и т.п. (см. Коган И.М. Ближняя радиолокация (теоретические основы). М.: Сов. радио, 1973, 272 с.).
Проблема однозначного измерения дальности в непосредственной близости от целей возникает, например, в системах охраны и защиты объектов, сооружений от несанкционированных приближений.
В промышленном производстве при решении ряда технологических процессов существует множество задач дистанционной оценки расстояний между подвижными инструментальными устройствами (например, в прокатно-металлургическом производстве).
Известны радиотехнические устройства для измерения относительно малых расстояний. Однако решение поставленной задачи однозначного измерения дальности в непосредственной близости от объекта ни одним из существующих радиодальномеров не может быть выполнено, так как они при измерении скорости перемещения объекта наблюдения не обладают однозначной селекцией по дальности искомого объекта (цели), если в них используется немодулированный зондирующий сигнал, а при наличии модуляции зондирующих сигналов (например, импульсной), появляется т.н. «мертвая зона», величина которой часто соизмерима или даже превосходит величину измеряемой дальности. Радиодальномеры, в которых используется периодическая частотная модуляция зондирующих сигналов, кроме того, обладают неоднозначностью оценки измеряемой дальности (см. Коган И.М. Ближняя радиолокация (теоретические основы). М.: Сов. радио, 1973, с.29-35).
Важным требованием к подобным радиодальномерам - это их помехоустойчивость ко всем активным и пассивным (преднамеренным или случайным) помехам, часто возникающих в результате работы других как радиотехнических и электротехнических устройств, находящихся в непосредственной близости на взаимодействующем объекте.
Так возникает главная проблема создания радиодальномера для однозначного измерения малых и сверхмалых расстояний в условиях действия различных помех.
К радиодальномерам, которые обладают однозначностью отсчета дальности в пределах некоторого фиксированного диапазона расстояний и которые имеют относительно высокую помехоустойчивость к различным внешним помехам, относится радиоустройство с непрерывным шумовым зондирующим сигналом [см. 1) см. Варакин Л.Е. Теория сложных сигналов. М.: Сов. Радио, 1970. 2) Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григоряна-Рябова, М.: Сов. радио, 1970, 680 с.].
Известны радиодальномеры, в которых обработка шумового сигнала проводится корреляционным способом, а расстояние до центра измеряемой дальности определяется задержкой сигнала в гетеродинном тракте корреляционного приемника [см. 1) Коган И.М. Ближняя радиолокация. М.: Сов. радио, 1973, с.29-35. 2) Патент США №3.614.782, МКИ GOIS 42C 13/04; НКИ 343-7РГ, 102-70.2г за 1971 г.].
Из известных наиболее близким по технической сущности является радиоустройство с шумовым сигналом, описанное в патенте США №3.419.861, кл. 343-7, заявл. 26.06.56, опублик. 31.12.68. Это радиоустройство содержит передатчик, излучающий шумовой сигнал типа «белый шум», приемопередающую антенну, циркулятор, смеситель, линию задержки, узкополосный фильтр, исполнительную схему.
Смеситель, линия задержки, узкополосный фильтр образуют коррелятор, на выходе которого максимальный уровень сигнала будет определяться положением объекта на расстоянии, пропорциональном величине линии задержки, т.к. только в этом случае отраженный и опорный шумовые сигналы, поступающие на смеситель, будут максимально коррелированы. При встрече радиодальномера с подвижным объектом, эхо-сигнал с доплеровским сдвигом частоты поступает на вход смесителя вместе с задержанным в линии задержки опорным (гетеродинным) сигналом. Узкополосный фильтр, находящийся на выходе смесителя, пропускает сигналы в диапазоне доплеровских частот. При появлении движущегося объекта на дальности, соответствующей установленной линии задержки, выходной сигнал фильтра вызывает срабатывание исполнительной схемы. Однако для измерения малых и сверх малых расстояний линия задержки в гетеродинном тракте смесителя должна отсутствовать.
Главным недостатком всех подобных структурных схем является ограничение нижней границы измеряемой дальности, возникающее как из-за влияния активного сигнала, просачиваемого в приемник из передающего тракта (т.н. сигнал развязки), так и за счет поступления на вход приемника помех из других источников, в том числе и от различных отражений близко расположенных вибрирующих поверхностей самого носителя радиоустройства или технологического оборудования.
Сигнал развязки вызывается как близостью расположения приемной и передающей антенн (или при совмещении приема-передачи сигнала одной антенной), так и слабой развязкой отдельных элементов приемо-передающего тракта, например, циркулятора. Этот недостаток в корреляционном приемнике проявляется особенно тогда, когда проводятся измерения таких малых расстояний, при которых линия задержки сигнала в его гетеродинном тракте должна отсутствовать.
При наличии помех и отсутствии линии задержки, учитывая шумовой характер двух сигналов - одного гетеродинного, а второго - отраженного, они становятся между собой коррелированными, даже тогда, когда объект наблюдения отсутствует. В этом случае на выходе смесителя появляется т.н. паразитный сигнал, уровень которого может быть достаточным для ложного срабатывания исполнительной схемы радиодальномера.
Ослабление влияния паразитных сигналов, естественно, может проводиться по пути устранения источников их возникновения, что в реальных устройствах ограниченных размеров выполнить достаточно сложно или, чаще всего, практически невозможно.
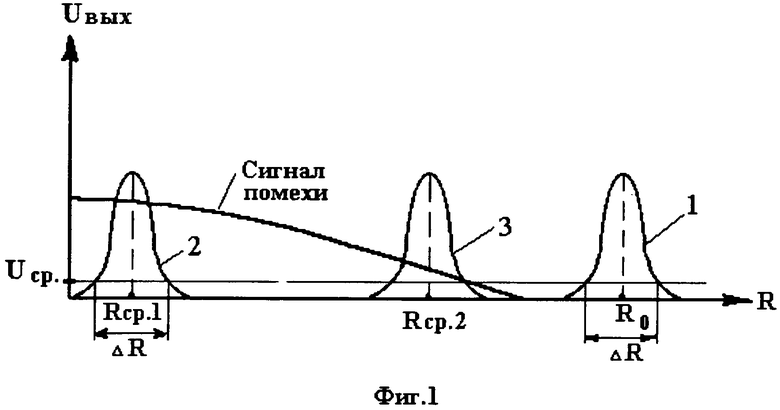
На фиг.1 представлено несколько видов сигналов на выходе корреляционного приемника радиодальномера с шумовым зондирующим сигналом в зависимости от дальности до отражающей поверхности: при наличии задержки сигнала в гетеродинном тракте, при отсутствии задержки сигнала в гетеродинном тракте, когда на вход приемника поступают сигналы помех. Если в гетеродинном тракте радиодальномера установлена линия задержки величиной τro, тогда максимальный уровень сигнала на выходе коррелятора будет тогда, когда объект находится на расстоянии R0 (см. фиг.1, позиция 1), т.е. тогда, когда время задержки сигнала, отраженного от наблюдаемого объекта, соответствует задержке сигнала линией задержки в гетеродинном тракте
 ,
,
где с - скорость распространения радиоволны.
На фиг.1, позиция 1, показано, что при наличии линии задержки сигнала в гетеродинном тракте на время τro максимальный сигнал на выходе корреляционного приемника будет на расстоянии R0 и при выбранных значениях ширины спектра зондирующего сигнала Δf и порогового уровня сигнала срабатывания - Ucp, элемент разрешения по дальности характеризуется величиной - ΔR, определяемой по формуле

Без влияний паразитных сигналов, о которых шла речь выше, и при отсутствии линии задержки в гетеродинном тракте, форма выходного сигнала могла бы быть такой же, как и в первом случае, но смещенной в сторону уменьшения расстояния, например, до величины Rcp1, как это показано на фиг.1, позиции 2. Однако наличие паразитных сигналов с уровнем не ниже порогового (Ucp) приводит к появлению на выходе смесителя приемника сигнала, достаточного для ложного срабатывания исполнительного механизма на любом расстоянии, определяемом наличием на входе приемника сигнала помехи (фиг.1, позиция 3). Так, например, если задана дальность срабатывания Rcp1, однако фактическое срабатывание может произойти на другом, большем расстоянии, например, - Rcp2, что свидетельствует о принципиальной невозможности прототипа радиодальномера производить срабатывание в условиях помех только на заданном расстоянии Rcp1 меньшем чем Rcp2 из-за того, что на большем расстоянии на выходе коррелятора из-за наличия помех сигнал может достигать уровня, достаточного для выдачи ложной исполнительной команды.
Техническим результатом реализации предлагаемого радиодальномера является надежность однозначного измерения малых расстояний в условиях действия различных помех.
Технический результат достигается тем, что для измерения малых расстояний в условиях действия различных помех в радиодальномер, содержащий передатчик шумового сигнала, циркулятор, приемо-передающую антенну, смеситель, первый узкополосный фильтр, исполнительную схему, введены второй узкополосный фильтр, два частотных детектора, два инвертора, два элемента И-НЕ, запоминающее устройство, устройство совпадения, устройство разрешения.
Передатчик шумового сигнала, соединенный с первым входом циркулятора, второй вход которого соединен с приемно-передающей антенной, выход циркулятора соединен с сигнальным (первым) входом смесителя, гетеродинный (второй) вход которого соединен с выходом передатчика шумового сигнала, выход смесителя соединен с входами двух узкополосных фильтров, выходы которых соединены с входами двух частотных детекторов, выход первого из них соединен со входом первого инвертора и с первым входом второго элемента И-НЕ, выход второго частотного детектора соединен со вторыми входами первого элемента И-НЕ и второго элемента И-НЕ, выход первого инвертора соединен с первыми входами первого элемента И-НЕ и устройства совпадения, выход первого элемента И-НЕ соединен с первым входом запоминающего устройства, выход второго элемента И-НЕ соединен со вторым входом устройства разрешения, выход которого соединен со вторым входом устройства совпадения, второй вход запоминающего устройства и первый вход устройства разрешения соединены с клеммой, на которую подается команда «пуск» в виде одиночного нулевого импульса, выход запоминающего устройства соединен с третьим входом устройства совпадения, выход которого соединен с последовательно соединенными вторым инвертором и исполнительной схемой.
На фиг.2 представлена структурная схема предлагаемого радиодальномера, на которой обозначено:
1 - передатчик шумового сигнала,
2 - циркулятор,
3 - приемно-передающая антенна,
4 - смеситель,
5 - первый узкополосный фильтр
6 - второй узкополосный фильтр,
7 - первый частотный детектор,
8 - второй частотный детектор,
9 - первый инвертор,
10 - второй элемент И-НЕ,
11 - первый элемент И-НЕ,
12 - устройство разрешения,
13 - запоминающее устройство,
14 - устройство совпадения,
15 - второй инвертор,
16 - исполнительная схема.
Радиодальномер содержит передатчик шумового сигнала 1, циркулятор 2, приемно-передающая антенна 3, смеситель 4, первый узкополосный фильтр 5, второй узкополосный фильтр 6, первый частотный детектор 7, второй частотный детектор 8, первый инвертор 9, второй элемент И-НЕ 10, первый элемент И-НЕ 11, устройство разрешения 12, запоминающее устройство 13, устройство совпадения 14, второй инвертор 15, исполнительная схема 16. Предлагаемый РД работает следующим образом.
По команде включения радиодальномера на клемму «пуск» подается одиночный нулевой импульс, чем обеспечивается готовность схемы радиодальномера к работе, и элементы обработки сигнала устанавливаются в исходное состояние. В исходное состояние радиодальномер приводится заранее, тогда, когда объект (цель) либо отсутствует вообще, либо она находится на расстоянии несоизмеримо большем, чем требуется для измерений.
Передатчик шумового сигнала 1 через циркулятор 2 и приемно-передающую антенну 3 излучает широкополосный шумовой сигнал (с девиацией Δfc) в пространство и, при наличии цели, сигнал, отразившись от нее, поступает через приемно-передающую антенну 3 на вход смесителя 4, имеющего квадратическую характеристику. В результате преобразования в смесителе 4 двух сигналов (отраженного и гетеродинного, поступающего на гетеродинный вход смесителя от передатчика) на его выходе будет сигнал биений, состоящий из набора частотных составляющих, обусловленных как полосой зондирующего шумового сигнала Δfc, так и задержкой отраженного от цели сигнала относительно излученного (гетеродинного) на величину τ так, что при дальности до цели R задержка отраженного сигнала будет равна
где с - скорость распространения радиоволны.
В исходном состоянии на вход антенны 3 сигнал от цели не поступает и его нет на выходе смесителя 4. В это время на входах и выходах двух узкополосных фильтров 5 и 6, а так же на выходах частотных детекторов 7, 8 сигнал так же отсутствует, сигнал отсутствует на двух входах второго элемента И-НЕ 10, а на вход инвертора 9 подается логический ноль; на выходе второго элемента И-НЕ 10 появляется логическая единица; на выходе первого элемента И-НЕ 11 появится логическая единица, а на выходе устройства разрешения 12 и запоминающего устройства 13 командой «пуск» устанавливается логический ноль; на выходе первого инвертора 9 появляется логическая единица. Следовательно, в исходном состоянии на первый вход устройства совпадения 14 поступает логическая единица, а на второй и третий его входы поступает логический ноль, в результате чего на выходе появится логическая единица, поступающая на вход второго инвертора 15, на выходе которого будет логический ноль, на входе исполнительной схемы 16 сигнала не будет.
Дадим более подробное пояснение о характере сигнала на выходе смесителя 4.
Если принять, что у излучаемого сигнала амплитуда постоянная, а частота изменяется по случайному закону ω0+ωf(t), тогда зондирующий сигнал можно представить в виде (см., например, В.М.Свистов. Радиолокационные сигналы и их обработка. М.: Сов. радио, 1977, с.310-314).

где ωf(t) - случайная функция.
Тогда, при движении цели относительно радиодальномера принятый сигнал отличается от излученного (т.е. гетеродинного, как опорного) не только временной задержкой на величину τ, но и доплеровским сдвигом частоты на величину Ωд и может быть представлен в виде

где ϕ1 - постоянная величина (фаза);
Umc - амплитуда принятого сигнала.
После преобразования в квадратичном смесителе на его выходе можно при помощи узкополосных фильтров выделить сигнал вида

где ϕ2 - постоянная величина (фаза).
Если же учесть, что спектр можно описать преобразованием Фурье (см. В.И.Тихонов Статическая радиотехника. М.: Сов. радио, 1966, с.85) вида

то становится ясно, что составляющие частоты преобразованного сигнала существенно зависят от дальности и закона изменения частоты.
Так как передатчик шумового сигнала 1 излучает сигнал изменяющейся частоты по случайному (шумовому) закону, то преобразованный сигнал характеризуется синусоидальным сигналом доплеровской частоты со случайной фазой. Если принять, что расстояние R=0, а стало быть, и τ=0, то преобразованный в смесителе сигнал становится гармоническим с частотой, равной частоте доплеровского смещения.
При условии наличия расстояния до цели, т.е. τ≠0 частота (фаза) сигнала на выходе смесителя флуктуирует по случайному закону и тем больше, чем больше расстояние R, так как пропорционально увеличивается τ. Следовательно, различной дальности соответствует своя верхняя частота преобразованного сигнала, а нижней частотной составляющей этого сигнала является доплеровская частота Ωд, обусловленная скоростью сближения радиодальномера и цели Vсбл и длиной волны передатчика, так что

При помощи узкополосных фильтров выделяются отдельные составляющие частот преобразованного сигнала.
Если взаимодействие радиодальномера и цели должно осуществляться на малых и сверх малых расстояниях, тогда задержка сигнала, обусловленная наличием паразитных поверхностей (например, собственная поверхность носителя радиодальномера или других пассивных помех) или наличием просачивания из передающего тракта сигнала в приемный может вызвать появление на выходе смесителя сигнала уровня, достаточного для срабатывания исполнительной схемы, а частота сигнала, соответствующая полосе прозрачности узкополосного фильтра, может быть обусловлена паразитными явлениями (например, вибрацией - т.н. вибропомехи, либо движением носителя радиодальномера в условиях действия различных пассивных помех и др.). Однако в этом случае в предлагаемом радиодальномере срабатывание исполнительной схемы 16 не произойдет. Покажем это дальнейшим рассмотрением работы предлагаемого радиодальномера.
Рассмотрим возможные ситуации при наличии и отсутствии цели в условиях помех.
1. При наличии цели, когда с ней сближается радиодальномер, тогда на некотором расстоянии, например, Rср2, большем, чем необходимом для срабатывания исполнительной схемы (если необходимое расстояние для подачи команды равно, например, Rcp1, см. фиг.1), на выходе первого узкополосного фильтра 5, настроенного на частоту, более высокую, чем второй узкополосный фильтр 6 и на выходе второго узкополосного фильтра 6 появляются сигналы, которые, проходя через частотные детекторы 7 и 8, вызывают появление на их выходах напряжения, пропорциональные частотам узкополосных фильтров. Таким образом, применение частотных детекторов, кроме решения ими в данной схеме главной задачи - преобразования частоты в напряжение, приводит к исключению влияния амплитудных флуктуаций выходных сигналов, в результате возможных флуктуаций эффективной поверхности рассеяния (ЭПР) целей.
С выхода первого частотного детектора 7 сигнал поступает на вход первого инвертора 9, а также на первый вход второго элемента И-НЕ 10. С выхода второго частотного детектора 8 сигнал поступает на второй вход первого элемента И-НЕ 11 и на второй вход второго элемента И-НЕ 10, определяющего границы дальности с момента появления сигналов на выходах частотных детекторов 7 и 8 до момента исчезновения сигнала на выходе второго частотного детектора 8 в результате сближения дальномера с целью вплоть до расстояния R1 (из фиг.1 следует, что R1<R2), при котором верхние частоты результирующего сигнала (биений) на выходе смесителя 4 становятся меньшими, чем резонансная частота второго узкополосного фильтра 6 (тем более, первого узкополосного фильтра 5). Работой второго элемента И-НЕ 10 формируется следующий алгоритм: сигнал от цели сначала должен появится на двух входах второго элемента И-НЕ 10, а затем последовательно исчезать, сначала на первом его входе, а затем и на втором. Момент пропадания сигнала на втором входе второго элемента И-НЕ 10 будет характеризовать достижение заданной дальности до цели и момент подачи команды на срабатывание исполнительной схемы 16.
Итак, в начальный момент времени, после появления сигнала от цели на выходах двух частотных детекторов 7, 8, на выходе второго элемента И-НЕ 10 появится логический ноль, поступающий на второй вход устройства разрешения 12. На выходе этого устройства появится логическая единица, которая в дальнейшем будет постоянной величиной при любых последующих значениях сигналов на втором входе этого устройства; на выходе первого инвертора 9 появится логический ноль, на выходе первого элемента И-НЕ 11 появится логическая единица, поступающая на первый вход запоминающего устройства 13, на выходе которого остается логический ноль, поступающий на третий вход устройства совпадения 14, на второй вход которого с выхода устройства разрешения 12 поступает логическая единица, в результате чего на инвертируемом выходе устройства совпадения 14 останется логическая единица, которая через второй инвертор 15 подает на вход исполнительной схемы 16 логический ноль, не вызывающий ее срабатывания. По мере дальнейшего сближения радиодальномера с объектом, с изменением между ними расстояния верхняя частота результирующего сигнала на выходе смесителя 4 снижается. Когда это снижение становится ниже частоты настройки первого узкополосного фильтра 5, тогда на его выходе и на выходе первого частотного детектора 7 сигнала не будет. В это время на первом входе второго элемента И-НЕ 10 и на входе первого инвертора 9 появится логический ноль, а на вторые входы второго элемента И-НЕ 10 и первого элемента И-НЕ 11 будет продолжаться поступление сигнала в виде логической единицы. В результате этого на выходе второго элемента И-НЕ 10 появится логическая единица, на выходе первого инвертора 9 появится логическая единица, поступающая на первый вход первого элемента И-НЕ 11, на выходе которого появляется логический ноль и поступающий на первый вход запоминающего устройства 13, в результате чего на его выходе продолжает оставаться логический ноль, поступающий на третий вход устройства совпадения 14, а на его выходе остается логическая единица, которая поступает на вход второго инвертора 15, в результате чего на его выходе и на входе исполнительной схемы 16 сигнала не будет, не вызывая ее срабатывание. При дальнейшем сближении радиодальномера с объектом за счет уменьшения расстояния с целью, когда задержка отраженного сигнала окажется настолько малой, что верхняя частота преобразованного сигнала на выходе смесителя 4 становится ниже частоты настройки второго узкополосного фильтра 6, тогда на его выходе, а стало быть, и на выходе второго частотного детектора 8 сигнала не будет, так же как и не будет сигнала на выходах первого узкополосного фильтра 5 и частотного детектора 7. В этом случае на первый и второй входы второго элемента И-НЕ 10, на второй вход первого элемента И-НЕ 11 и на вход первого инвертора 9 поступает логический ноль. В результате этого на выходе второго элемента И-НЕ 10 появляется сигнал логической единицы, поступающий на второй вход устройства разрешения 12, с выхода которого продолжает поступать сигнал логической единицы на второй вход устройства совпадения 14. На выходе первого инвертора 9 остается сигнал логической единицы, поступающий на первый вход первого элемента И-НЕ 11, в результате чего на его выходе появляется логическая единица, поступающая на первый вход запоминающего устройства 13, на выходе которого появится логическая единица, поступающая на третий вход устройства совпадения 14. На первый вход устройства совпадения 14 продолжает поступать логическая единица выхода первого инвертора 9.
Таким образом, на три входа устройства совпадения 14 поступают сигналы логической единицы, в результате чего на его выходе появится логический ноль, который поступает на вход второго инвертора 15, с выхода которого на вход исполнительной схемы 16 поступает сигнал логической единицы и, как результат, вызывая его срабатывание.
2. При наличии помехи, когда цель отсутствует могут быть ситуации:
- имеются помехи, обусловленные слабой развязкой приемо-передающего тракта и ложными отражениями;
- имеются преднамеренные активные помехи.
Рассмотрим работу предлагаемого радиодальномера в каждой мешающей ситуации раздельно.
2.1. Ситуация наличия помех, обусловленных слабой развязкой приемо-передающего тракта и ложными отражениями.
Как рассматривалось выше, помехи, обусловленные слабой развязкой приемо-передающего тракта и отражениями от ложной поверхности (например, от поверхности собственного носителя радиодальномера) могут создавать сигнал на выходе корреляционного приемника (на выходе узкополосного фильтра) только в случае, если узкополосный фильтр настроен на частоту, которая может возникнуть в результате вибрации поверхности отражения или в результате вибрации всего радиодальномера, которая вызывает т.н. вибрационные шумы в приемо-передающем тракте, а сигнал развязки по уровню достаточно большой. Если узкополосные фильтры 5 и 6 настроены таким образом, что их средние частоты более высокие, чем резонансная частота колебаний (вибраций) отражающей поверхности, тогда на выходе узкополосных фильтров 5 и 6 сигнала помех не будет, не будет сигнала и на выходе частотных детекторов 7 и 8. Тогда создается первоначальная (исходная) ситуация, рассмотренная ранее в пункте описания работы радиодальномера при отсутствии сигнала на выходах двух частотных детекторов 7, 8. Не повторяясь в рассмотрении состояния всей схемы, отмечаем, что на входе исполнительной схемы 16 сигнала не будет, чем обеспечивается несрабатывание радиодальномера от воздействия сигнала развязки и наличия отражений от отражений посторонних вибрирующих поверхностей.
2.2. Ситуация при наличии активных помех.
При наличии активных помех на выходе узкополосного фильтра корреляционного радиодальномера с шумовым зондирующим сигналом, сигнала не будет, т.к. сигнал активной помехи не будет коррелирован с опорным (гетеродинным) шумовым сигналом, а степень защиты от активных помех корреляционного приемника с шумовым сигналом зависит от степени сложности шумового сигнала (см., например, Варакин Л.Е. Теория сложных сигналов. М.: Сов. Радио, 1970).
Таким образом возникает ранее рассмотренная ситуация, при которой на выходе двух узкополосных фильтров 5, 6, а стало быть, и на выходе двух частотных детекторов 7 и 8 сигнала не будет, в результате чего не будет происходить срабатывание исполнительной схемы 16.
Рассмотренная работа предлагаемой схемы радиодальномера показывает фактическую достижимость поставленной цели: обеспечивается однозначное измерение малых и сверхмалых расстояний и обеспечивается помехоустойчивость радиодальномера за счет применения в нем шумового сигнала.
Практическая реализация предлагаемого радиодальномера может быть осуществлена с применением широко известными аналоговыми элементами и интегральными микросхемами (см. Интегральные микросхемы. Справочник./Под общей ред. Б.В.Тарабрина. М.: Сов. радио, 1984):
Инверторы - К155 ЛН1;
Элементы И-НЕ - К155 ЛАЗ;
Устройство разрешения - К155 ТМ2;
Запоминающее устройство - К155 ТМ2;
Устройство совпадения - К155 ЛА4.
Введением предлагаемых новых элементов и связей между ними принципиально по-новому решается проблема создания радиолокационных дальномеров для измерения малых и сверхмалых расстояний с повышенной точностью в условиях действия различных помех.
Изготовленный и испытанный макет предлагаемого радиодальномера показал его полную работоспособность в условиях действия рассмотренных выше радиопомех. Испытания проводились в лабораторных и натурных условиях взаимодействия радиодальномера с летательным аппаратом.
Источники информации
1. Коган И.М. Ближняя радиолокация (теоретические основы). М.: Сов. радио, 1973, 272 с.
2. Варакин Л.Е. Теория сложных сигналов. М.: Сов. Радио, 1970.
3. Радиолокационные устройства (теория и принципы построения). /Под ред. В.В.Григоряна-Рябова, М.: Сов. радио, 1970, 680 с.
4. Патент США №3.614.782, МКИ GOIS 42C 13/04; НКИ 343-7РГ, 102-70.2 г за 1971 г.
5. Патент США №3.419.861, кл. 343-7, заявл. 26.06.56, опублик. 31.12.68 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ МАЛЫХ ВЫСОТ | 2010 |
|
RU2449310C2 |
| РАДИОЛОКАЦИОННЫЙ ФИКСАТОР ДАЛЬНОСТИ С КОМБИНИРОВАННОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ И ПРЕДЕЛЬНОЙ РЕГРЕССИОННОЙ ОБРАБОТКОЙ | 2012 |
|
RU2508557C1 |
| Радиодальномер | 1982 |
|
SU1107662A1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410729C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434253C1 |
| АНАЛИЗАТОР РАДИОПОМЕХ | 1983 |
|
SU1840997A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 1993 |
|
RU2038614C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2369418C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2515191C2 |
| РАДИОДАЛЬНОМЕР | 1999 |
|
RU2152053C1 |
Предлагаемый радиодальномер относится к радиолокационной технике и предназначен для однозначного измерения малых и сверхмалых расстояний, исчисляемых от нескольких метров до долей метра. Достигаемым техническим результатом предлагаемого радиодальномера является надежность однозначного измерения малых расстояний в непосредственной близости от объектов и в условиях действия различных помех. Техническая реализация радиодальномера для однозначного измерения малых и сверхмалых расстояний в условиях действия различных помех осуществляется передатчиком шумового сигнала, циркулятором, приемно-передающей антенной, смесителем, первым узкополосным фильтром, вторым узкополосным фильтром, первым частотным детектором, вторым частотным детектором, первым инвертором, первым элементом И-HE, запоминающим устройством, вторым инвертором, устройством совпадения, устройством разрешения, вторым элементом И-НЕ, третьим инвертором и исполнительной схемой, соединенным определенным образом. 2 ил.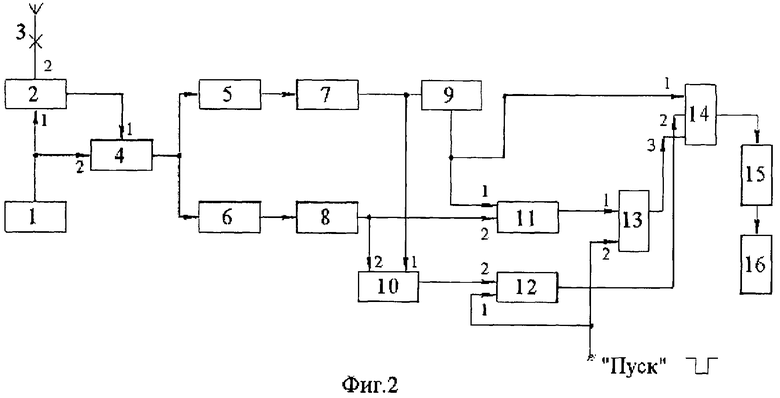
Радиодальномер, содержащий передатчик шумового сигнала, циркулятор, приемо-передающую антенну, смеситель, первый узкополосный фильтр, исполнительную схему, отличающийся тем, что введены второй узкополосный фильтр, два частотных детектора, два инвертора, два элемента И-НЕ, запоминающее устройство, устройство совпадения, устройство разрешения, при этом передатчик шумового сигнала соединен с первым входом циркулятора, второй вход которого соединен с приемо-передающей антенной, выход циркулятора соединен с сигнальным входом смесителя, гетеродинный вход которого соединен с выходом передатчика шумового сигнала, выход смесителя соединен с входами двух узкополосных фильтров, выходы которых соединены с входами соответствующих двух частотных детекторов, выход первого из них соединен с входом первого инвертора и с первым входом второго элемента И-НЕ, выход второго частотного детектора соединен с вторыми входами первого и второго элементов И-НЕ, выход первого инвертора соединен с первыми входами первого элемента И-НЕ и устройства совпадения, выход первого элемента И-НЕ соединен с первым входом запоминающего устройства, выход второго элемента И-НЕ соединен со вторым входом устройства разрешения, выход которого соединен со вторым входом устройства совпадения, второй вход запоминающего устройства и первый вход устройства разрешения соединены с клеммой, на которую подается команда «пуск» в виде одиночного нулевого импульса, выход запоминающего устройства соединен с третьим входом устройства совпадения, выход которого соединен с последовательно соединенными вторым инвертором и исполнительной схемой.
| US 3419861, 31.12.1968 | |||
| РАДИОДАЛЬНОМЕР | 1992 |
|
RU2018866C1 |
| RU 1566947 A3, 20.10.1999 | |||
| РАДИОЛОКАЦИОННЫЙ ДАЛЬНОМЕР | 1999 |
|
RU2151408C1 |
| US 6111536 A, 29.08.2000 | |||
| US 4905009 A, 27.02.1990 | |||
| US 7095364 B1, 22.08.2006. | |||

