Предлагаемое изобретение относится к вспомогательным устройствам, входящим в технологический комплекс для нанесения покрытий при производстве изделий электронной техники, и служит для бесконтактного перемещения изделий к местам обработки внутри вакуумной камеры при уменьшении генерации микродисперсных частиц внутривакуумными механизмами и увеличении коэффициента выхода годных изделий.
Известно бесконтактное магнитное транспортное устройство, использующее механизм возбуждения отталкивающей силы на основе вихревых токов, создаваемых повышенными частотами. (N.Kawada, S.Morii "An attempt at development of a magnetic levitation transport system in vacuum using the mechanism of induced repulsive force" Vacuum-1993-volume 44, 5-7, pp.757-759).
Такая система содержит электромагниты, расположенные в неподвижной части, и транспортную тележку из немагнитного материала - в подвижной. Магнитное поле, вызванное электромагнитами, наводит в транспортной тележке вихревые токи. В результате взаимодействия вихревых токов с электромагнитным полем переменного тока тележка левитирует (под ред. дтн. проф. Ю. М. Пятина "Постоянные магниты" справочник/Москва, "Энергия", 1980 г., стр.156). Важная особенность данной системы - способность тележки к самостабилизации благодаря краевому эффекту, возникающему за счет горизонтальных компонент сил отталкивания. Левитирование тележки осуществляется в результате возбуждения электромагнитов с однофазным переменным током, а для перемещения используется линейный трехфазный двигатель. В этой системе перемещение и левитация осуществляются независимо путем одновременного возбуждения линейного множества электромагнитов с однофазным током и трехфазным током, имеющих различные частоты.
Недостатком такого устройства является нестандартное двухчастотное питание (110 Гц и 200 Гц, необходимое для обеспечения левитации и перемещения соответственно), усложненная система питания (возможно несколько номиналов напряжения), переменный магнитный поток вызывает акустический шум и электромагнитный шум.
Наиболее близким техническим решением является транспортное устройство, состоящее из транспортной тележки, которая перемещается по П-образным направляющим внутри вакуумной камеры, и в своем составе имеет 4 опорных ролика с горизонтальными осями и 4 ролика-ограничителя с вертикальными осями вращения, удерживающими тележку от поперечных перемещений. (Дмитриев Е.В., Майоров А.А, Махрин П.В., Одиноков В.В., Рагузин В.Д., Смирнов B.C. "Многокамерная установка непрерывного действия "Электроника ТМ-1203" для нанесения пленок в вакууме"/Электронная промышленность. 1992 г., 6, стр.33-34).
Недостатком данного устройства, принятого за прототип, является наличие пар трения в вакууме, что приводит к ухудшению качества наносимых пленок в связи с появлением микродисперсных частиц, привносимых на полупроводниковую подложку.
Задачей, на решение которой направлено изобретение, является устранение пар трения из вакуумной камеры.
Указанный технический результат достигается тем, что транспортное устройство, содержащее транспортную тележку с подложками, расположенную внутри вакуумной камеры, согласно изобретению содержит постоянные магниты, установленные одноименными полюсами друг к другу, и электромагниты постоянного тока и снабжено автоматической системой, содержащей датчики перемещения, причем часть постоянных магнитов расположена снаружи вакуумной камеры под днищем с возможностью образования транспортных несущих дорожек, а четыре постоянных магнита установлены внутри вакуумной камеры в углах транспортной тележки, а электромагниты постоянного тока установлены под днищем вакуумной камеры с возможностью обеспечения пошагового перемещения транспортной тележки и удержания ее от боковых перемещений.
Также указанный технический результат достигается тем, что в транспортном устройстве, содержащем транспортную тележку с подложками, расположенную внутри вакуумной камеры, согласно изобретению датчики, контролирующие изменение положения транспортной тележки, состоят из конструкционных элементов электромагнитов постоянного тока и установленных на них дополнительных измерительных обмоток, соединенных с автономным источником питания и возможностью попарного замыкания магнитного потока внутри этих обмоток и направления его перпендикулярно магнитному потоку электромагнита.
Предлагаемое устройство (фиг.1) содержит прямоугольную транспортную тележку 1 с подложками 2, расположенную внутри вакуумной камеры 3, с четырьмя постоянными магнитами 4, укрепленными по одному в каждом из четырех ее углов, и якорями 5, закрепленными на транспортной тележке, две дорожки из постоянных магнитов 6 и дорожку из электромагнитов 7, расположенные снаружи вакуумной камеры.
Устройство работает следующим образом.
Транспортная тележка 1 перемещает подложки 2 к местам обработки вдоль оси Х (фиг. 2). Такое перемещение осуществляется за счет поочередного возбуждения пар электромагнитов 7, расположенных вдоль всего пути следования транспортной тележки 1 и взаимодействующих с якорями 5. Магниты 4, укрепленные на транспортной тележке 1, взаимодействуя с постоянными магнитами 6, расположенными в виде двух дорожек снаружи вакуумной камеры 3, отталкиваются от последних, так как обращены друг к другу одноименными полюсами. Таким образом, транспортная тележка 1 левитирует.
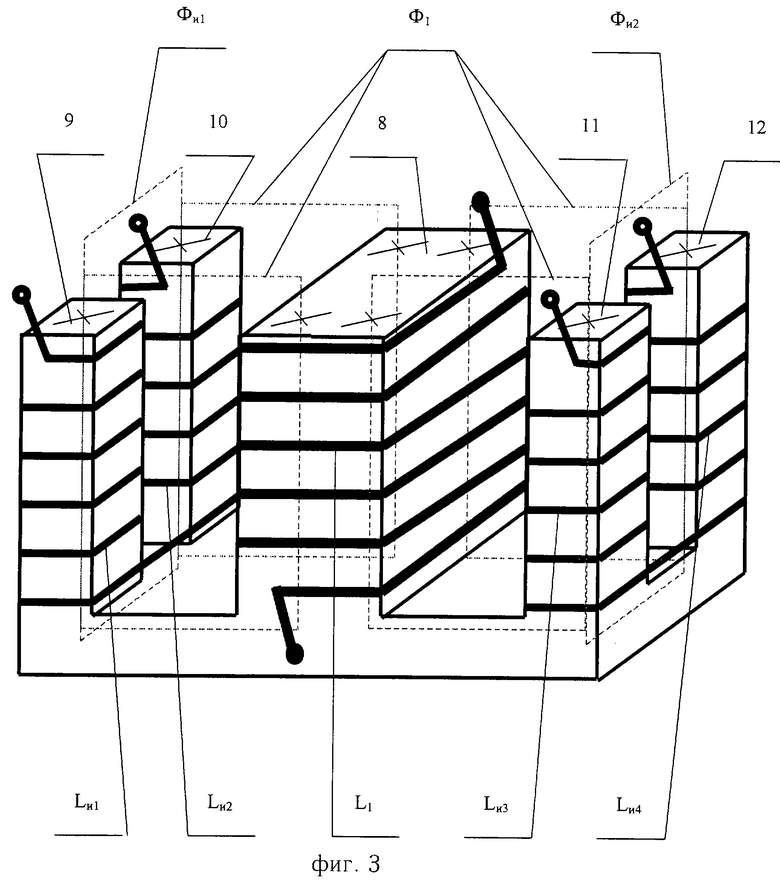
Для придания системе устойчивости с целью удержания транспортной тележки 1 на заданной координате при смещении ее в направлении оси Y в конструкцию введена электромагнитная часть, оказывающая притягивающее действие на тележку, которая в зоне взаимодействия постоянных магнитов, расположенных одноименными полюсами друг к другу, испытывает отталкивание. Она состоит из электромагнитов 7, взаимодействующих через неферромагнитную стенку вакуумной камеры 3, необходимую для разделения сред, с якорями 5, закрепленными на транспортной тележке 1. Создание тягового усилия с составляющими по осям X, Y, Z возложено на силовую обмотку L1 (фиг.3) с наибольшим числом ампер-витков, питаемую постоянным током от управляющего устройства, расположенную на центральном стержне 8 электромагнита 7.
Однако указанная компоновка для устранения смещения транспортной тележки 1 по оси Y требует наличия датчиков в системе управления в связи с необходимостью получения от них многокомпонентных сигналов о положении транспортной тележки 1 в пространстве.
Для уменьшения количества датчиков и в связи с тем, что функционирование электромагнитов 7 связано одновременно с характерным параметром - положением транспортной тележки 1 внутри вакуумной камеры 3 и электромагнитным параметром - воздушным зазором между якорем 5 и ярмом электромагнита 7, целесообразно использовать конструкцию электромагнита 7 и в качестве датчика перемещения транспортной тележки 1. В этом случае может быть применено разделение магнитных потоков в конструкции электромагнита 7 в пространственном отношении и по временному признаку.
Датчик перемещения (фиг. 3) представлен измерительными обмотками Lи1, Lи2, Lи3, Lи4, питаемыми током повышенной частоты (5 кГц) и расположенными на боковых стержнях 9, 10, 11, 12 электромагнита 7. Обмотки Lи1 и Lи2, Lи3 и Lи4, включенные попарно последовательно, создают магнитные потоки Фи1, Фи2, каждый из которых замыкается через свою пару боковых стержней (9 и 10, 11 и 12) электромагнита 7. Условные магнитные оси потоков Фи1 и Фи2 расположены перпендикулярно магнитной оси тягового потока Ф1, который создается силовой обмоткой L1 и замыкается через боковые стержни 9, 10, 11, 12 и центральный стержень 8 электромагнита 7.
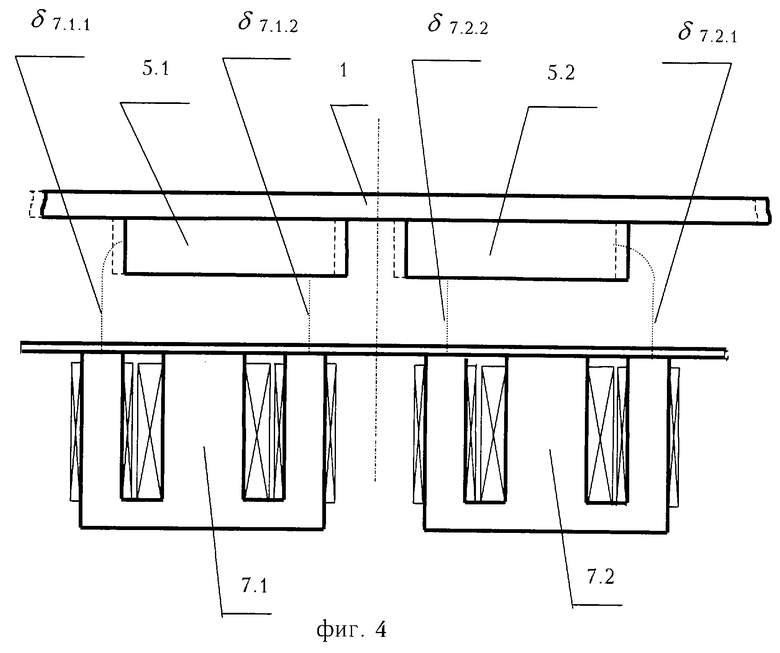
Наличие четырех измерительных обмоток Lи1 и Lи2, Lи3 и Lи4 позволяет получать сигналы в систему автоматического управления стабилизацией положения тележки по осям X, Z и X, Y, Z через сигналы об изменении зазоров δ7.1.1, δ7.1.2. (фиг.4).
Для удержания транспортной тележки 1 на заданных координатах X, Y, Z система стабилизации ее положения должна содержать два электромагнита 7.1 и 7.2 и, следовательно, два датчика перемещения. Их следует располагать таким образом, чтобы при смещении транспортной тележки 1 влево по оси У правый элекромагнит 7.2 своим тяжением возвращал ее в исходное положение, а левый 7.1, ослабляя свое воздействие, не препятствовал данному процессу. Для этого у электромагнита 7.2 зазор δ7.2.1 должен быть протяженнее в направлении Y зазора δ7.1.1. электромагнита 7.1. Сигналы от датчиков перемещения поступают в усилительные каналы системы управления и воздействуют через силовую обмотку на величину тягового усилия электромагнитов 7.1 и 7.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАГНИТНОЙ ЛЕВИТАЦИИ | 1997 |
|
RU2131165C1 |
| УСТРОЙСТВО МАГНИТНОЙ ЛЕВИТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2539304C2 |
| КАТАЛЬНАЯ ГОРА С МАГНИТОЛЕВИТАЦИОННЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2525796C1 |
| Устройство перемещения по путепроводу транспорта с магнитной левитацией для повышения грузоподъёмности | 2021 |
|
RU2761150C1 |
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ КОМБИНИРОВАННОГО ПУТЕПРОВОДА | 2014 |
|
RU2573135C1 |
| Транспортная система | 2016 |
|
RU2643900C1 |
| РЕГУЛИРУЕМЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА С КОРРЕКЦИЕЙ ПОДЪЕМНОЙ СИЛЫ | 2015 |
|
RU2611858C1 |
| КОМБИНИРОВАННЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2573524C1 |
| БЕЗВАЛЬНЫЙ ГЕНЕРАТОР | 2014 |
|
RU2605204C1 |
| УПРАВЛЯЕМЫЙ МАГНИТНЫЙ ПОДШИПНИК НА ПОСТОЯННЫХ МАГНИТАХ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2563884C2 |
Изобретение относится к вспомогательным устройствам, входящим в технологический комплекс для нанесения покрытий при производстве изделий электронной техники. Предлагается транспортное устройство, содержащее транспортную тележку с подложками, расположенную внутри вакуумной камеры, в котором применены постоянные магниты, расположенные одноименными полюсами друг к другу, причем часть из них, образующая транспортные несущие дорожки, расположена снаружи под днищем вакуумной камеры, а четыре расположены внутри вакуумной камеры в углах транспортной тележки для осуществления ее левитации, и удерживающие управляемые электромагниты постоянного тока, расположенные под днищем вакуумной камеры и обеспечивающие пошаговое перемещение транспортной тележки вдоль пути следования, а также удержание ее от боковых перемещений, управляемые автоматической системой с помощью датчиков перемещения. В качестве датчиков, выдающих сигнал об изменении положения транспортной тележки, применены конструкционные элементы тяговых электромагнитов постоянного тока с расположенными на них дополнительными измерительными обмотками, питаемыми от автономной сети повышенной частоты, магнитный поток которых замыкается попарно внутри этих обмоток и направлен перпендикулярно магнитному потоку тягового электромагнита. Изобретение направлено на улучшение качества наносимых пленок. 1 з.п. ф-лы, 4 ил.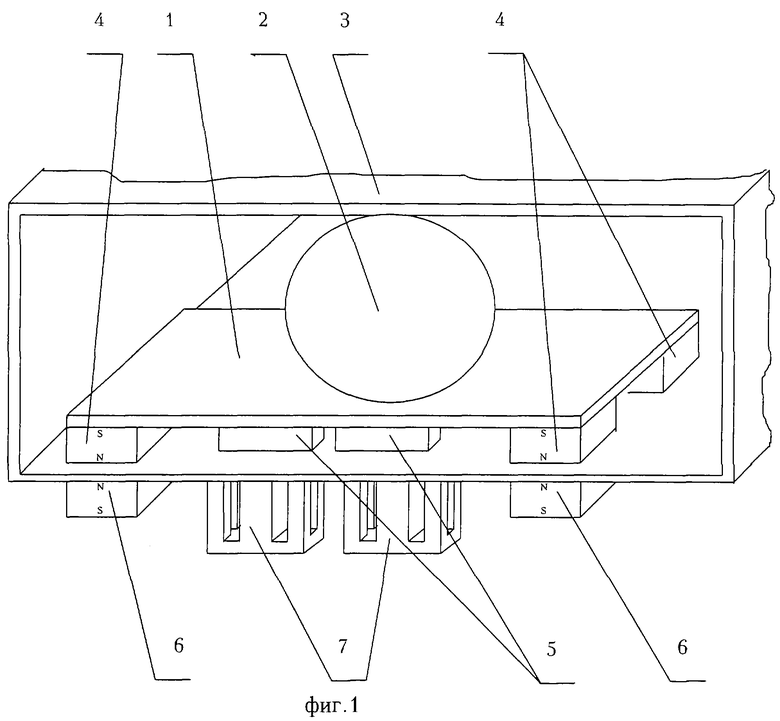
| ДМИТРИЕВ Е.В | |||
| и др | |||
| Врезной замок с секретным запором | 1921 |
|
SU1203A1 |
| - Электронная промышленность, 1992, №6, с.33-34 | |||
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ПОДЛОЖЕК В ВАКУУМНОЙ УСТАНОВКЕ | 1992 |
|
RU2020190C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОННО-ЛУЧЕВОЙ ОБРАБОТКИ ИЗДЕЛИЙ | 1991 |
|
RU2023746C1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| ЕР 0448782 А2, 02.10.1991 | |||
| Способ извлечения йода | 1973 |
|
SU476219A1 |
| СПОСОБ КИСЛОТНОЙ ОБРАЬОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИН | 0 |
|
SU289194A1 |
