Изобретение относится к области энергомашиностроения, в частности к электромеханическим преобразователям энергии на бесконтактных подшипниках, и может быть использовано для управления положением ротора на магнитных подшипниках на постоянных магнитах в тихоходных системах.
Известен механизм с магнитным подвесом ротора (а.с. СССР №1569932, Н02К 7/09, 1990 г.), в котором каждый канал системы содержит датчик положения ротора, пропорционально-интегрально-дифферснциальный регулятор, силовой преобразователь и два электромагнита.
Недостатком данной конструкции являются сложность ее технической реализации, повышенные массогабаритные показатели системы и низкая надежность, вызванная использованием электромагнитов.
Известна конструкция системы управления магнитным подшипником (патент РФ №2181922 C2, H02P 6/16, H02K 7/09, H02K 29/06.2002.04.27), каждый канал управления которой содержит датчик положения ротора, силовой преобразователь, два электромагнита, причем обмотки электромагнитов подключены к силовому преобразователю, каждый канал которого снабжен интегральным регулятором и форсирующим регулятором второго порядка, причем выход интегрального регулятора соединен с прямым входом форсирующего регулятора второго порядка, выход которого соединен с входом силового преобразователя, а выход датчика положения ротора соединен с инверсными входами обоих регуляторов.
Недостатком данной конструкции являются сложность ее технической реализации, повышенные массогабаритные показатели системы и низкая надежность, вызванная использованием электромагнитов.
Известна конструкция магнитного подшипника (патент РФ 2246644 C1 F16C 32/04, 2005.02.20), в которой модуль управления содержит формирователь вектора радиального перемещения ротора, соединенный выходом через блок динамической обработки сигнала радиального отклонения с входом формирователя управляющих токов в обмотках управления радиальной опоры, который выходами подключен ко входам соответствующих усилителей мощности канала стабилизации радиального положения ротора, выходы которых являются первыми управляющими выходами модуля управления, блок контроля процесса управления, выполненный с возможностью передачи управляющей информации в систему автоматического управления машины, выпрямитель напряжения выходами соединен через емкостный фильтр со входами регулятора напряжения и источника вторичного электропитания, выполненного с возможностью подключения к выводам электропитания всех блоков модуля управления, причем один из выходов емкостного фильтра и выход регулятора напряжения являются третьими управляющими выходами модуля управления, при этом входы формирователя вектора радиального перемещения ротора являются первыми информационными входами модуля управления, а формирователь управляющих токов в обмотках управления радиальной опоры выполнен с возможностью реализации векторной стабилизации ротора по осям в радиальных направлениях.
Недостатком данной конструкции являются сложность ее технической реализации, повышенные массогабаритные показатели системы и низкая надежность, вызванная использованием электромагнитов.
Известен способ управления неустойчивостью в гидродинамических подшипниках (патент РФ №2399803, F16C 17/02, 08.06.2005), по которому управления неустойчивостью гидродинамических подшипников, включающих гидродинамические подшипники, используемые в узлах высокоскоростных роторов или валов, включающий использование магнитного подшипника в комбинации с гидродинамическим подшипником, причем гидродинамический подшипник используют в качестве подшипника, воспринимающего основную нагрузку, а магнитный подшипник используют в качестве средства управления неустойчивостью в гидродинамическом подшипнике.
Недостатком данной конструкции являются сложность ее технической реализации, повышенные массогабаритные показатели системы и низкая надежность, вызванная использованием электромагнитов.
Известен магнитный подшипник (патент РФ №2089761 С1, F16C 32/04, 10.09.1997), содержащий вал, ротор из двух колец из постоянного магнита, намагниченный в осевом направлении, статор, включающий полюсный элемент и две кольцевые катушки. В осевом зазоре между кольцами ротора установлен кольцевой диск из немагнитного материала с высокой электропроводностью.
Недостатком данной конструкции являются сложность ее технической реализации, повышенные массогабаритные показатели системы и низкая надежность, вызванная использованием электромагнитов.
Известен упорный магнитный подшипник с подмагничиванием постоянным магнитным полем смещения (патент РФ №2138706 C1, F16C 32/04, F16C 39/06, 27.09.1999), содержащий вращающийся элемент (или вал) с ободом (или опорным участком) кольцевой формы, находящимся между парой зубцов подковообразного управляющего элемента. Постоянным магнитом создается магнитное поле, распространяющееся через нависающую консоль и порождающее силу притяжения между подмагниченными поверхностью консоли и верхней торцевой поверхностью вала. Эта смещающая сила притяжения поддерживает вал в равновесии так, что обод находится между поверхностями пары зубцов и равноудален от них. Внутри подковообразного управляющего элемента вокруг вала намотаны обмотки.
Недостатком данной конструкции являются сложность ее технической реализации, повышенные массогабаритные показатели системы и низкая надежность, вызванная использованием электромагнитов.
Известна опора (патент РФ №2178243 С2, H05H 1/00, 10.01.2002), содержащая установленный в корпусе цилиндрический аксиально намагниченный магнит, размещенную на роторе соосно ферромагнитную втулку, расположенную напротив нижнего торца магнита, и кольцевую камеру с демпфирующей жидкостью. Камера снабжена внутри радиально подвижным кольцевым элементом, подвешенным на гибких нитях и состоящим из внутреннего ферромагнитного кольца и связанного с ним наружного немагнитного кольца.
Недостатком данной конструкции являются сложность ее технической реализации, повышенные массогабаритные показатели системы и низкая надежность, вызванная использованием электромагнитов.
Известен способ управления постоянным магнитом (патент РФ 2416835 C2, H01F 7/02, 2010), по которому управляют полем постоянного магнита путем изменяемой магнитной проницаемости зазора между его полюсами, включающий постоянный магнит, к полюсу или обоим полюсам которого приставляют управляющие катушки с замкнутыми ферромагнитными сердечниками и через которые пропускают ток или его импульсы нужной амплитуды и нужной полярности, при этом происходит намагничивание (насыщение) замкнутых ферромагнитных сердечников, изменяющих сопротивление в магнитной цепи постоянного магнита.
Недостатком данного способа являются ограниченные функциональные возможности, обусловленные управлением только внешним магнитным полем, сложность технической реализации и низкая надежность.
Известен способ управления магнитным потоком, создаваемым постоянным магнитом, и устройство для его осуществления (патент РФ 2092922 C1, H01F 007/04), по которому управляющий магнитный поток формируют таким образом, что вектор плотности его перпендикулярен вектору плотности магнитного потока, создаваемого в магнитном шунте постоянным магнитом, магнитный шунт выполняют из изотропного по магнитоэлектрическим параметрам, например по магнитной проницаемости, магнитной индукции насыщения и удельному электрическому сопротивлению материала, и, изменяя величину управляющего магнитного потока путем регулирования магнитного сопротивления магнитного шунта, управляют магнитным потоком.
Недостатком данного способа являются ограниченные функциональные возможности, обусловленные невозможностью управления положением ротора в магнитных подшипниках на постоянных магнитах, сложность технической реализации и низкая надежность.
Известно устройство магнитной левитации и контроля гибридного магнитного подшипника (заявка на патент US 2012/0139375 A1, кл. H02K 7/09, 2012 г.), содержащее ротор, датчики положения ротора, П-образный кольцевой электромагнит, в полюсах которого имеются вставки из двух радиально намагниченных постоянных магнитов прямоугольной формы и одного аксиально намагниченного постоянного магнита прямоугольной формы.
Недостатком данной конструкции являются сложность ее технической реализации, повышенные массогабаритные показатели системы и низкая надежность, вызванная использованием электромагнитов.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является радиальный подшипник на магнитной подвеске (патент РФ 2264565 C2, F16C 32/04, 20.11.2005), содержащий вал, корпус, кольцевые постоянные магниты, страховочные радиальные механические подшипники, торцевой подшипник, наружные и внутренние кольца кольцевых постоянных магнитов.
Недостатками данного устройства являются повышенные массогабаритные показатели электрической машины, вызванные способом установки механических подшипников, и ограниченные функциональные возможности, обусловленные отсутствием управления положением ротора электрической машины.
Задача изобретения - расширение функциональных возможностей, благодаря введению возможности управления положением ротора в магнитных подшипниках на постоянных магнитах без участия электромагнитов или других типов подшипников, минимизация массогабаритных показателей, повышение надежности и энергоэффективности.
Техническим результатом является энергоэффективный управляемый магнитный подшипник на постоянных магнитах с минимальными массогабаритными показателями и повышенной надежностью.
Поставленная задача решается и указанный результат достигается тем, что в магнитном подшипнике на постоянных магнитах, содержащем вал, корпус, подвижный и неподвижный постоянные магниты, страховочные подшипники, согласно изобретению неподвижный постоянный магнит выполнен в виде секторов, формирующих окружность, при этом между соседними секторами постоянных магнитов установлены теплоизоляционные прокладки, причем к каждому сектору приложен управляемый источник тепла.
Поставленная задача решается и указанный результат также достигается тем что согласно изобретению управление параметрами магнитного подшипника на постоянных магнитах осуществляется путем изменения остаточной индукции и коэрцитивной силы секторов постоянных магнитов благодаря воздействию на постоянные магниты регулируемым тепловым потоком.
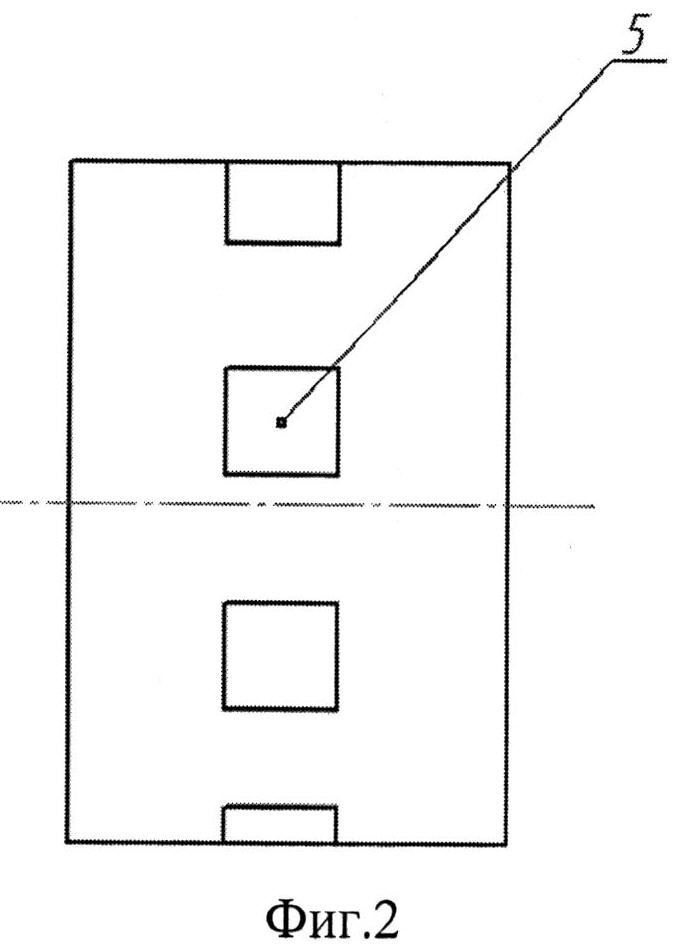
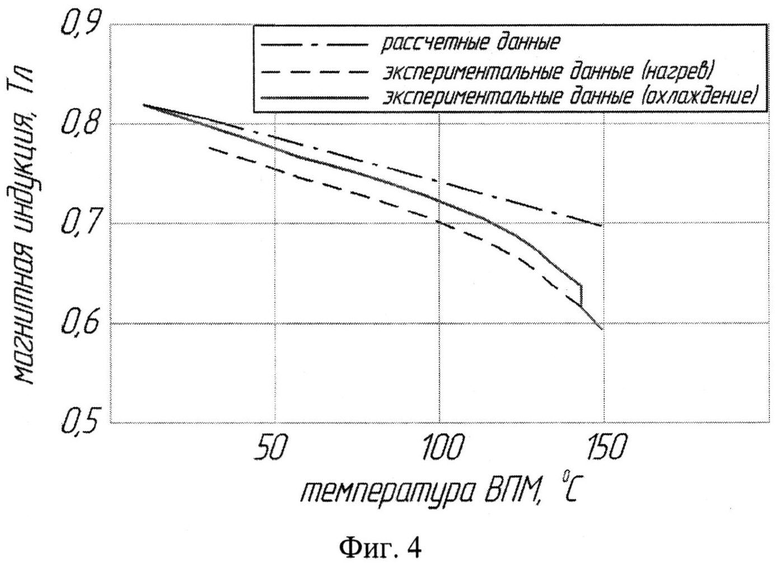
Сущность изобретения поясняется чертежами. На фиг.1 изображен вид спереди управляемого магнитного подшипника на постоянных магнитах. На фиг.2 изображен вид сбоку теплоизоляционной втулки. На фиг.3 изображен разрез управляемого магнитного подшипника на постоянных магнитах. На фиг.4 изображена зависимость остаточной индукции от температуры для магнитов марки NdFeB.
Предложенное устройство содержит: корпус 1 (фиг.1), в котором установлен неподвижный постоянный магнит, выполненный в виде секторов, формирующих окружность 2, запрессованных в радиальные окна 3, теплоизоляционной втулки 4 с осевыми окнами 5 (фиг.2), в осевых окнах 5 установлены управляемые источники тепла 6 (фиг.3), электрически соединенные с системой управления 7, электрически соединенной с датчиками положения ротора 8 (фиг.3), вал 9, на котором установлены подвижные постоянные магниты 10 и концентрично валу 9 с зазором расположены страховочные подшипники 11, причем неподвижный постоянный магнит, выполненный в виде секторов, формирующих окружность 2, установлен относительно подвижного постоянного магнита 10 концентрично одноименными полюсами.
Управляемый магнитный подшипник на постоянных магнитах работает следующим образом: при вращении вала 9 возникает эксцентриситет между неподвижным постоянным магнитом, выполненным в виде секторов, формирующих окружность 2, и подвижным постоянным магнитом 10. При эксцентриситете возникает неравномерность магнитной индукции в воздушном зазоре и сил между неподвижным постоянным магнитом, выполненным в виде секторов, формирующих окружность 2, и подвижным постоянным магнитом 10, которые зависят от остаточной индукции постоянных магнитов. Величина эксцентриситета определяется датчиками положения ротора 8 и передается в систему управления 7, которая подает управляющий сигнал на управляемые источники тепла 6, воздействие которых либо снижают, либо повышают остаточную индукцию определенного сектора неподвижного постоянного магнита, выполненного в виде секторов, формирующих окружность 2, благодаря чему вал 9 возвращается в концентричное положение.
Пример конкретной реализации способа
Зависимость остаточной индукции и коэрцитивной силы от температуры описывается выражениями


где Br(Т), HC(T) - действующие значения остаточной индукции и коэрцитивной силы постоянного магнита соответственно;
Br(Т), HC(T) - значения остаточной индукции и коэрцитивной силы постоянного магнита, указанные в технических характеристиках соответственно;
ТВПМ - температура постоянного магнита;
kBr - температурный коэффициент остаточной индукции постоянного магнита;
kHc - температурный коэффициент коэрцитивной силы постоянного магнита.
Силы отталкивания постоянных магнитов зависят от индукции в воздушном зазоре между ними:

где F - силы отталкивания;
Bz - индукция в воздушном зазоре;
µ0 - магнитная проницаемость вакуума;
S - площадь внешней поверхности постоянных магнитов.
Индукция в зазоре между постоянными магнитами определяется выражением
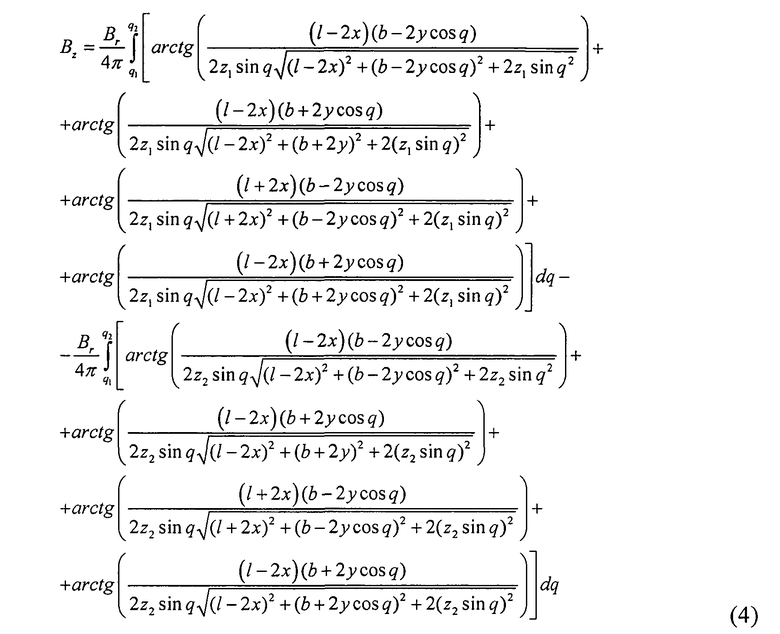
где Br - остаточная индукция постоянных магнитов; x, y, z - соответственно координаты точки, в которой рассчитывается магнитная индукция; l - осевая длина постоянных магнитов; 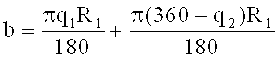
Таким образом, из выражений (1)-(4) видно, что при повышении температуры остаточная индукция постоянного магнита изменяется, а следовательно, и изменяются силы отталкивания в зазоре между постоянными магнитами.
При смещении вала с подвижным постоянным магнитом марки NdFeB SH38 на 30% силы отталкивания на стороне уменьшения воздушного зазора увеличиваются на 25%. Величина смещения измеряется датчиками положения ротора, например вибродатчиками DS1, производства компании ТИК г. Пермь, и передается в блок управления, который изменяет температуру управляемого источника тепла, выполненного в виде электронагревателя со спиралью на 10 градусов, что приводит к изменению температуры неподвижного постоянного магнита марки NdFeB SH38, при этом остаточная индукция неподвижного постоянного магнита марки NdFeB SH38, фиг.4, снижается на 10%, что приводит к снижению силы отталкивания и стабилизации вала, теплоизоляционная втулка предохраняет соседние постоянные магниты от повышения температуры, и их остаточная индукция остается неизменной.
Таким образом, осуществляется управление положением вала в магнитных подшипниках на постоянных магнитах.
Итак, заявляемое изобретение позволяет расширить функциональные возможности благодаря введению возможности управления положением ротора в магнитных подшипниках на постоянных магнитах без участия электромагнитов или других типов подшипников, минимизировать массогабаритные показатели и повысить надежность и энергоэффективность магнитного подшипника на постоянных магнитах.
В результате повышается энергоэффективность и надежность управляемого магнитного подшипника на постоянных магнитах и минимизируются массогабаритные показатели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспазовый синхронный генератор с интегрированным магнитным подвесом | 2016 |
|
RU2647490C1 |
| ВЫСОКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ВЕРТИКАЛЬНЫМ ВАЛОМ | 2013 |
|
RU2540696C1 |
| ГИБРИДНЫЙ МАГНИТНЫЙ ПОДШИПНИК С ОСЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2540215C1 |
| СПОСОБ РАЗГРУЗКИ ПОДШИПНИКОВ ЭЛЕКТРОМЕХАНИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ ЭНЕРГИИ | 2014 |
|
RU2557333C1 |
| СИСТЕМА НА ГИБРИДНЫХ МАГНИТНЫХ ПОДШИПНИКАХ | 2014 |
|
RU2547450C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ РОТОРА В МАГНИТНЫХ ПОДШИПНИКАХ | 2012 |
|
RU2518053C1 |
| ГИБРИДНЫЙ МАГНИТНЫЙ ПОДШИПНИК С ИСПОЛЬЗОВАНИЕМ СИЛ ЛОРЕНЦА (ВАРИАНТЫ) | 2016 |
|
RU2636629C1 |
| Система на магнитных подшипниках | 2016 |
|
RU2626461C1 |
| СПОСОБ БЕССЕНСОРНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ РОТОРА В БЕСКОНТАКТНЫХ ПОДШИПНИКАХ | 2014 |
|
RU2539690C1 |
| Радиально-упорный магнитный подшипник | 2019 |
|
RU2714055C1 |
Изобретение относится к области энергомашиностроения, в частности к электромеханическим преобразователям энергии на бесконтактных подшипниках, и может быть использовано для управления положением ротора в магнитных подшипниках. Технический результат: снижение массогабаритных показателей, повышение надежности. Управляемый магнитный подшипник на постоянных магнитах содержит вал, корпус, подвижный и неподвижный постоянные магниты, страховочные подшипники. Неподвижный постоянный магнит выполнен в виде секторов, формирующих окружность. Между соседними секторами постоянных магнитов установлены теплоизоляционные прокладки. К каждому сектору приложен управляемый источник тепла. Управление параметрами магнитного подшипника на постоянных магнитах осуществляется путем изменения их остаточной индукции и коэрцитивной силы за счеёт воздействия на постоянные магниты регулируемым тепловым потоком. 2 н.п. ф-лы, 4 ил.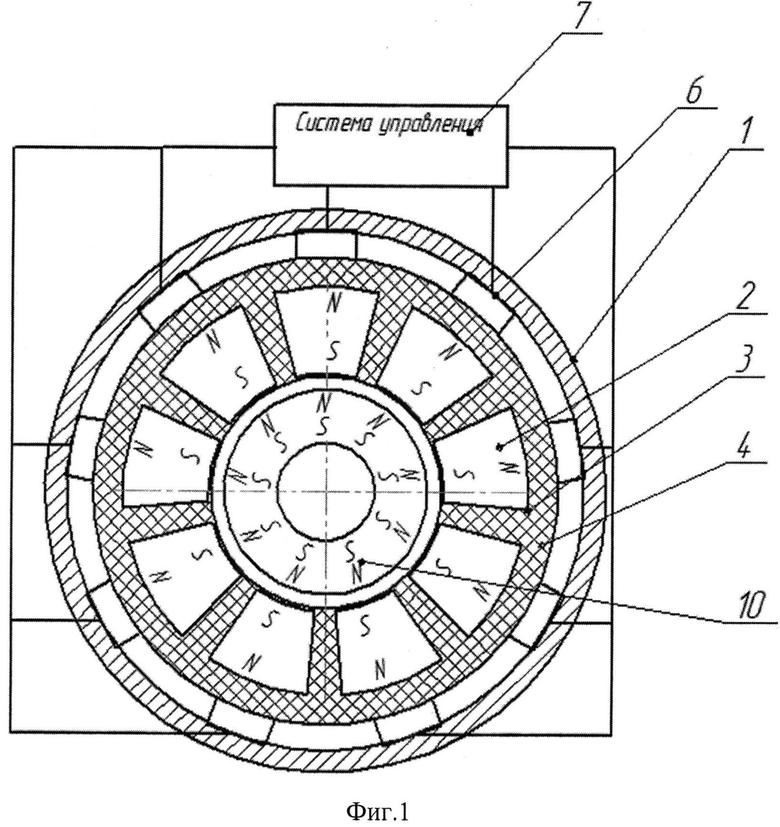
1. Управляемый магнитный подшипник на постоянных магнитах, содержащий вал, корпус, подвижный и неподвижный постоянные магниты, страховочные подшипники, отличающийся тем, что неподвижный постоянный магнит выполнен в виде секторов, формирующих окружность, при этом между соседними секторами постоянных магнитов установлены теплоизоляционные прокладки, причем к каждому сектору приложен управляемый источник тепла.
2. Способ управления управляемым магнитным подшипником на постоянных магнитах, отличающийся тем, что управление параметрами магнитного подшипника на постоянных магнитах осуществляется путем изменения их остаточной индукции и коэрцитивной силы благодаря воздействию на постоянные магниты регулируемым тепловым потоком.
| РАДИАЛЬНЫЙ ПОДШИПНИК НА МАГНИТНОЙ ПОДВЕСКЕ | 2003 |
|
RU2264565C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОНЦЕНТРИЧНОСТЬЮ В НЕКОАКСИАЛЬНОМ АСИНХРОННОМ ДВИГАТЕЛЕ | 1998 |
|
RU2201029C2 |
| СПОСОБ ПОЗИЦИОННОГО КОНТРОЛЯ ВРАЩАЮЩЕГОСЯ ЭЛЕМЕНТА, УДЕРЖИВАЕМОГО ПОСТОЯННЫМ МАГНИТНЫМ ПОЛЕМ | 2002 |
|
RU2277936C2 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ ОПОРА | 2005 |
|
RU2287726C1 |
| US 20120139375 A1, 07.06.2012 | |||

