Изобретение относится к области магнитолевитационной транспортной техники.
Транспорт - важнейшая составляющая социально-экономической жизни страны. Требования современного общества к транспортным характеристикам постоянно растут, объемы перевозок пассажиров и грузов увеличиваются, и вместе с ними растут требования к скорости транспортных средств.
Ответом на вызовы времени становится транспорт на основе магнитной левитации. Суть магнитолевитационной технологии состоит в том, что транспортное средство за счет электромагнитного взаимодействия активной путевой структуры и бортового силового оборудования зависает над путевым полотном и движется над ним благодаря тяговому линейному электродвигателю.
Из уровня техники известна транспортная система с магнитолевитационными транспортными средствами по патенту РФ №2539304, согласно которому транспортные средства включают вертикально установленные электродвигатели с торцевыми магнитными колесами на валу и электропроводящим элементом, отличающееся тем, что электродвигатели с торцевыми магнитными колесами на валу установлены в активной путевой структуре, а электропроводящий элемент - на несущей тележке транспортного средства, причем магнитные колеса выполнены в виде торцевых дисков с сегментами из постоянных магнитов, верхняя плоскость которых совпадает с верхней плоскостью основания активной путевой структуры, а электропроводящий элемент выполнен в виде развернутой «беличьей клетки», установленной в пазах ферромагнитного сердечника в днище несущей тележки транспортного средства.
Заявленное изобретение решает задачу создания конструкции грузовой магнитолевитационной транспортной платформы (ГМЛТП), удовлетворительных конструкций которых в настоящее время не существует.
Согласно изобретению заявлена транспортная система, содержащая грузовую магнитолевитационную транспортную платформу и активную путевую структуру, при этом грузовая магнитолевитационная транспортная платформа содержит типовую фитинговую платформу, установленную на двух несущих тележках, каждый магнитный модуль левитации состоит из бортового и путевого магнитных полюсов левитации, причем путевой магнитный полюс установлен на активной путевой структуре, а бортовой магнитный полюс прикреплен к несущей тележке, при этом на несущих тележках установлено четыре магнитных полюса левитации - по два на каждую тележку, кроме того, транспортная платформа снабжена тяговым линейным электродвигателем, выполненным в виде линейного синхронного двигателя со сверхпроводниковой обмоткой возбуждения и системой питания, статор которого уложен вдоль активной путевой структуры.
Кроме того, заявленное техническое решение характеризуется наличием ряда дополнительных факультативных признаков, а именно:
- в конструкции статора может быть использован шихтованный ферромагнитный сердечник;
- в конструкции статора может быть использован немагнитный сердечник;
- путевая обмотка статора линейного синхронного двигателя может быть выполнена в виде трехфазной волновой обмотки с фазами, сдвинутыми на 2π/3 и питаемыми трехфазным переменным током;
- сборки бортовых магнитных полюсов системы возбуждения линейного синхронного двигателя могут быть выполнены в виде совокупности элементарных постоянных магнитов, у которых вектор намагничивания направлен перпендикулярно плоскости любой из поверхностей при обеспечении чередования смежных полюсов элементарных постоянных магнитов;
- платформа может быть снабжена страховочными ограничителями перемещения;
- платформа может быть снабжена боковыми маневровыми страховочными колесами, укрепленными по бокам несущих тележек и взаимодействующими с продольными путевыми балками.
Технический результат, получаемый при использовании заявленной совокупности существенных признаков, заключается в обеспечении перманентной левитации с повышенным левитационным зазором грузовой магнитолевитационной транспортной платформы - на стоянке, участках разгона, торможения и на основном участке пути.
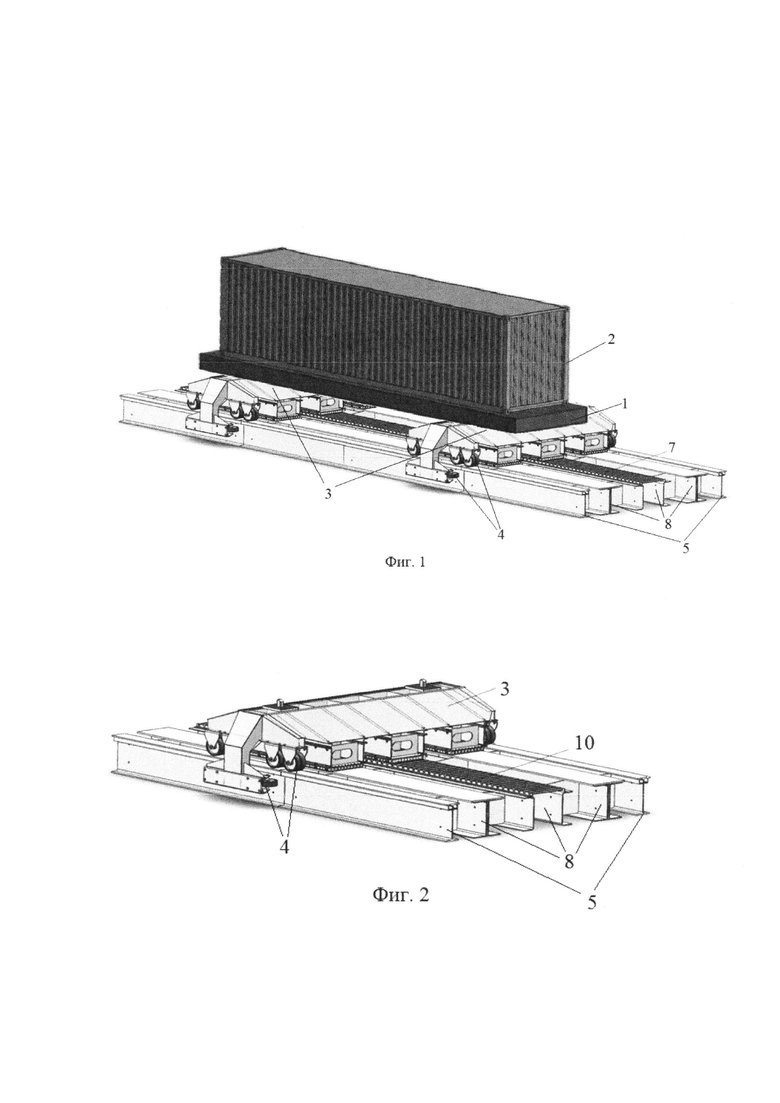
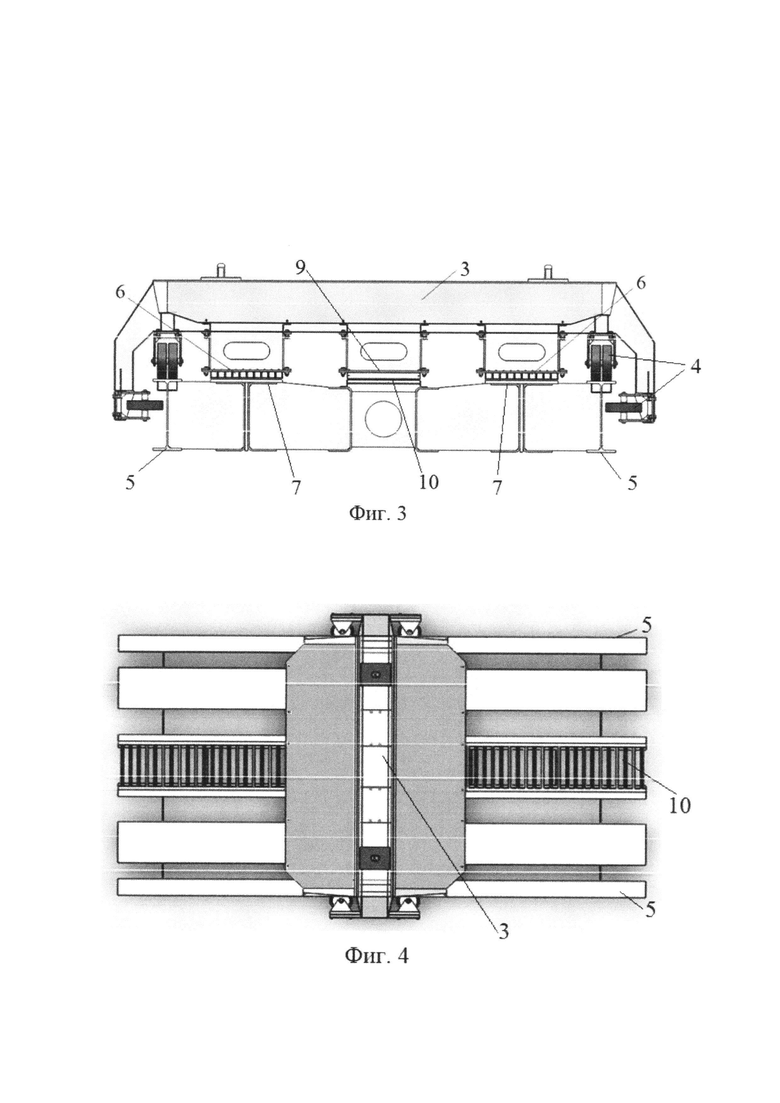
Сущность изобретения поясняется чертежами, где на фиг. 1 изображена грузовая магнитолевитационная транспортная платформа заявленной транспортной системы с морским контейнером на активной путевой структуре, на фиг. 2 - общий вид магнитолевитационной тележки на активной путевой структуре, на фиг. 3 - поперечный разрез пути и вид спереди магнитолевитационной тележки, на фиг. 4 - вид сверху магнитолевитационной тележки на активной путевой структуре.
Транспортная система включает грузовые магнитолевитационные транспортные платформы, каждая из которых содержит типовую фитинговую платформу 1 с морским контейнером 2, установленную на двух несущих тележках 3, снабженных боковыми маневровыми страховочными колесами 4, укрепленными по бокам несущих тележек 3 и взаимодействующими с продольными путевыми балками 5. На несущих тележках 3 установлены четыре магнитных модуля - по два магнитных модуля на каждую тележку. Каждый магнитный модуль состоит из бортового магнитного полюса 6 и путевого магнитного полюса 7 левитации. Путевой магнитный полюс 7 установлен на активной путевой структуре 8, а бортовой магнитный полюс 6 прикреплен к соответствующей несущей тележке 3. Платформа снабжена тяговым линейным электродвигателем, выполненным в виде линейного синхронного двигателя со сверхпроводниковой обмоткой возбуждения 9 и системой питания, статор 10 которого уложен вдоль активной путевой структуры 8.
Заявленная транспортная система работает следующим образом.
Каждый магнитный модуль левитации состоит из бортового 6 и путевого 7 магнитных полюсов. Путевой магнитный полюс 7 устанавливается на активной путевой структуре 8, а бортовой магнитный полюс 6 крепится на несущих тележках 3. Модуль левитации обеспечивает компенсацию весовой нагрузки >10 тонн при левитационном зазоре ≥20 мм. Левитационный зазор в отсутствие весовой нагрузки составляет ≥80 мм. Боковые маневровые страховочные колеса 4, укрепленные по бокам несущих тележек 3 и взаимодействующие с продольными путевыми балками 5, обеспечивают постоянное нахождение грузовой платформы на продольной оси симметрии путевой структуры.
Одним из условий достижения высокой скорости ГМЛТП является относительно большой рабочий зазор между бортовой обмоткой возбуждения 9 и статором 10 тягового линейного электродвигателя. Рабочий зазор линейного асинхронного двигателя (ЛАД) находится в пределах 10-15 мм, что вызывает повышенные требования к точности изготовления несущей конструкции активной путевой структуры. Однако даже при таком небольшом рабочем зазоре КПД линейного ЛАД составляет η~0,6, а коэффициент мощности cos ϕ~0,5, соответственно, энергетический фактор η cos ϕ~0,3. Для питания бортовой обмотки возбуждения требуется подвод тока через контактную сеть.
Линейный синхронный двигатель (ЛСД), по сравнению с ЛАД, имеет значительно более высокий энергетический фактор и рабочий зазор. Его полюса могут быть выполнены в двух вариантах: из постоянных магнитов или со сверхпроводниковой обмоткой возбуждения. Как следствие, ЛСД не нуждается в силовой контактной сети. При этом технологический зазор, например, между центром сверхпроводниковой обмотки возбуждения и верхней поверхностью статора может находиться в пределах 200-300 мм. При этом воздушный зазор >30 мм.
В ЛСД со сверхпроводниковой обмоткой возбуждения в конструкции статора можно заменить шихтованный ферромагнитный сердечник на немагнитный (например, текстолитовый). Такое техническое решение позволяет исключить силы тяготения между сверхпроводниковой обмоткой возбуждения и ферромагнитопроводом, снизить потери на гистерезис и вихревые токи. Отсутствие силы тяготения уменьшает весовую нагрузку на систему левитации. ЛСД с «односторонним индуктором» внутренне присуща поперечная стабилизация, что, в свою очередь, снижает нагрузку на систему боковой стабилизации.
Наиболее оптимальным типом путевой обмотки статора ЛСД является трехфазная волновая обмотка с фазами, сдвинутыми на 2π/3 и питаемыми трехфазным переменным током с частотой 0-50 Гц. Поскольку ЛСД работает при значительном рабочем зазоре, требования к величине погрешности монтажа активной путевой структуры смягчаются. Это влечет за собой снижение капитальных и эксплуатационных затрат на строительство путепровода.
Несмотря на то, что во вращающихся электрических машинах чаще применяются двухслойные обмотки, в ЛСД более предпочтительны однослойные обмотки. При этом третья гармоника магнитного поля исключается посредством соединения трехфазной обмотки статора звездой. Благодаря большому технологическому зазору гармонические составляющие магнитного поля в области расположения сверхпроводниковых обмоток возбуждения будут малыми и практически не окажут влияния на работу ЛСД. Во избежание большого количества соединений между секциями трехфазную обмотку статора ЛСД целесообразно наматывать изолированным кабелем. В отсутствие шихтованного сердечника с пазами необходимо предусматривать крепление обмотки, например, с помощью хомутов.
При использовании полюсов из постоянных магнитов NdFeB, собранных по простейшей из схем Хальбаха, рабочий зазор, практически равный технологическому, может составлять ~25 мм, а магнитная индукция до 0,5 Тл.
Для достижения заданного значения магнитной индукции и формы магнитного поля в рабочем зазоре линейного синхронного двигателя могут быть применены различные варианты сборок бортовых магнитных полюсов системы возбуждения. В результате выполненных расчетов из оптимального выбран вариант сборки в виде совокупности элементарных постоянных магнитов, у которых вектор намагничивания направлен перпендикулярно плоскости любой из поверхностей и при сборке обеспечивается чередование элементарных постоянных магнитов, поворачиваемых последовательно на 90°.
В ходе испытаний ГМЛТП была продемонстрирована практическая осуществимость основных систем - левитации и линейной тяги. Согласно протоколу совещания по результатам осмотра и демонстрации ГМЛТП от 31.03.2105 г., при нагрузке 28 т левитационный зазор составляет 25 мм при нулевой скорости и при перемещении на расстояние 60 см. Полученные параметры согласуются со значениями, которые установлены экспериментально при испытании на нагрузку 4-штатных магнитных модулей левитации.
Заявленное техническое решение представляет собой универсальную транспортную систему с грузовыми магнитолевитационными транспортными платформами, опытный образец которой имеет следующие характеристики:
- масса ГМЛТП с грузом 40 т;
- весовая нагрузка по площади платформы распределяется равномерно;
- левитационный зазор при штатной весовой нагрузке ГМЛТП - не менее 10 мм;
- левитационный зазор в отсутствие груза на ГМЛТП - не менее 20 мм;
- габариты бортового магнитного полюса левитации 690×590×56 мм;
- габариты путевого магнитного полюса левитации 1215×590×56 мм;
- бортовые магнитные полюса левитации должны быть установлены на ГМЛТП симметрично относительно ее геометрического центра тяжести;
- точность расположения бортовых магнитных полюсов левитации вдоль активной путевой структуры относительно путевых магнитных полюсов левитации ±1 мм;
- узлы крепления и юстировки должны обеспечивать точность установки бортовых и путевых магнитных полюсов левитации относительно друг друга по трем координатам не менее ±1 мм;
- горизонтальная боковая сила при относительном (±5 мм) смещении бортовых и путевых магнитных полюсов левитации составляет не более 200 кГс в расчете на пару модулей, смонтированных на несущей тележке;
- отклонение от параллельности плоскостей бортовых и путевых магнитных полюсов левитации не должно быть более ±5 мм;
- горизонтальные маневровые колеса как узлы страховки должны компенсировать боковую силу не менее 1000 кГс;
- узлы страховки должны обеспечивать вертикальное перемещение ГМЛТП при ее погрузке и разгрузке.
Полномасштабный опытный образец заявленной ГМЛТП во время его стендовых испытаний продемонстрировал работоспособность основных узлов - левитации при нулевой скорости и перемещении на ограниченное условиями эксперимента расстояние с помощью линейного синхронного двигателя.
Заявленная грузовая магнитолевитационная транспортная платформа предназначена для использования в проектируемой пилотной дискретно-конвейерной магистрали по транспортировке контейнеров на дальние, в том числе трансконтинентальные, расстояния с высокой скоростью, эффективностью, большим «жизненным циклом», безопасностью и экологичностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитолевитационное транспортное средство | 2019 |
|
RU2724030C1 |
| ГРУЗОВАЯ МАГНИТОЛЕВИТАЦИОННАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2018 |
|
RU2755552C2 |
| УСТРОЙСТВО МАГНИТНОЙ ЛЕВИТАЦИИ И ПОПЕРЕЧНОЙ СТАБИЛИЗАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2523875C1 |
| УСТРОЙСТВО МАГНИТНОЙ ЛЕВИТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2539304C2 |
| Система магнитной левитации и боковой стабилизации магнитолевитационного транспортного средства | 2016 |
|
RU2647784C1 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД МАГНИТОЛЕВИТАЦИОННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2651385C2 |
| СИСТЕМА МАГНИТНЫХ ЛИФТОВ В ПОДЗЕМНЫХ ВЫРАБОТКАХ | 2023 |
|
RU2810348C1 |
| КАТАЛЬНАЯ ГОРА С МАГНИТОЛЕВИТАЦИОННЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2525796C1 |
| МАГНИТОЛЕВИТАЦИОННЫЙ СТРЕЛОЧНЫЙ ПЕРЕВОД БЕЗ МЕХАНИЧЕСКИХ И ПОДВИЖНЫХ УЗЛОВ | 2019 |
|
RU2745747C2 |
| ТРАНСПОРТНАЯ СИСТЕМА С ДВУХСТОРОННЕЙ ЛЕВИТАЦИЕЙ МОДУЛЕЙ, ПЕРЕМЕЩАЕМЫХ ОТНОСИТЕЛЬНО ЭСТАКАДЫ АРОЧНОГО ТИПА | 2018 |
|
RU2722256C1 |
Транспортная система относится к области магнитолевитационной транспортной техники. Грузовая магнитолевитационная транспортная платформа транспортной системы содержит типовую фитинговую платформу 1 с морским контейнером 2, установленную на двух несущих тележках 3, снабженных боковыми страховочными колесами 4, укрепленными по бокам несущих тележек 3 и взаимодействующими с продольными путевыми балками 5. На несущих тележках 3 установлены четыре магнитных модуля - по два магнитных модуля на каждую тележку. Каждый магнитный модуль состоит из бортового магнитного полюса 6 и путевого магнитного полюса 7 левитации. Путевой магнитный полюс 7 установлен на активной путевой структуре 8, а бортовой магнитный полюс 6 прикреплен к соответствующей несущей тележке 3. Платформа снабжена тяговым линейным электродвигателем, выполненным в виде линейного синхронного двигателя со сверхпроводниковой обмоткой возбуждения 9 и системой питания, статор 10 которого уложен вдоль активной путевой структуры 8. Заявленная грузовая магнитолевитационная транспортная платформа предназначена для использования в проектируемой пилотной дискретно-конвейерной магистрали по транспортировке контейнеров на дальние, в том числе трансконтинентальные, расстояния. В результате достигается высокая эффективность, износостойкость, безопасность и экологичность транспортной системы. 6 з.п. ф-лы, 4 ил.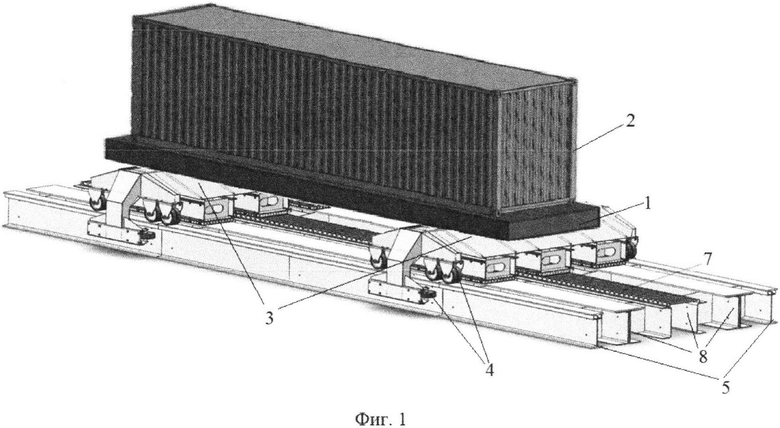
1. Транспортная система, содержащая грузовую магнитолевитационную транспортную платформу и активную путевую структуру, при этом грузовая магнитолевитационная транспортная платформа содержит типовую фитинговую платформу, установленную на двух несущих тележках, каждый магнитный модуль левитации состоит из бортового и путевого магнитных полюсов левитации, причем путевой магнитный полюс установлен на активной путевой структуре, а бортовой магнитный полюс прикреплен к несущей тележке, при этом на несущих тележках установлено четыре магнитных полюса левитации - по два на каждую тележку, кроме того, транспортная платформа снабжена тяговым линейным электродвигателем, выполненным в виде линейного синхронного двигателя со сверхпроводниковой обмоткой возбуждения и системой питания, статор которого уложен вдоль активной путевой структуры.
2. Транспортная система по п.1, отличающаяся тем, что в конструкции статора линейного синхронного двигателя использован шихтованный ферромагнитный сердечник.
3. Транспортная система по п.1, отличающаяся тем, что в конструкции статора линейного синхронного двигателя использован немагнитный сердечник.
4. Транспортная система по п.1, отличающаяся тем, что путевая обмотка статора линейного синхронного двигателя выполнена в виде трехфазной волновой обмотки с фазами, сдвинутыми на 2π/3 и питаемыми трехфазным переменным током.
5. Транспортная система по п.1, отличающаяся тем, что сборки бортовых магнитных полюсов системы возбуждения линейного синхронного двигателя выполнены в виде совокупности элементарных постоянных магнитов, у которых вектор намагничивания направлен перпендикулярно плоскости любой из поверхностей при обеспечении чередования смежных полюсов элементарных постоянных магнитов.
6. Транспортная система по п.1, отличающаяся тем, что она снабжена страховочными ограничителями перемещения.
7. Транспортная система по п.1, отличающаяся тем, что платформа снабжена боковыми страховочными колесами, укрепленными по бокам несущих тележек и взаимодействующими с продольными путевыми балками.
| УСТРОЙСТВО МАГНИТНОЙ ЛЕВИТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2539304C2 |
| УСТРОЙСТВО ТРАНСПОРТНОЙ СИСТЕМЫ И СПОСОБ РЕГУЛИРОВАНИЯ ТРАНСПОРТНО-ПАССАЖИРСКИХ ПОТОКОВ МЕГАПОЛИСА | 1995 |
|
RU2104363C1 |
| ЭЛЕКТРИЧЕСКАЯ ТЯГОВАЯ СИСТЕМА ДЛЯ ВЫСОКОСКОРОСТНОГО НАЗЕМНОГО ТРАНСПОРТА | 2002 |
|
RU2229988C2 |
| JP 7193914 A, 28.07.1995. | |||

