Область техники, к которой относится изобретение
Изобретение относится к устройству магнитного подвеса левитационных транспортных средств.
Уровень техники
Для перевозки людей или грузов с применением магнитной левитации предложено сравнительно много способов передвижения, при которых транспортное средство без механического контакта с путепроводом (путевой структурой) удерживается над ним с помощью пондеромоторных сил, генерируемых электромагнитами или постоянными магнитами (магнитная подушка). Тяговый двигатель может разгонять транспортное средство на магнитном подвесе до скоростей, существенно превышающих скорости движения обычного транспорта.
Например, в патенте US 7533616 предусматривается наличие в путепроводе специального направляющего ферромагнитного рельса (феррорельса) с поперечным профилем различной формы. На транспортном средстве имеются электромагниты, которые притягиваются к феррорельсу. Управляя величиной тока электромагнита на транспортном средстве, добиваются фиксации положения последнего относительно феррорельса. Тяговый двигатель транспортного средства разгоняет его до заданной скорости, преодолевая только сопротивление воздуха и силу электродинамического торможения, которая в данном случае имеет малую величину.
Для обеспечения оптимального режима работы тягового двигателя важно выдерживать постоянным зазор между транспортным средством и путепроводом. Флуктуация зазора в покое и при движении (зависящая от загрузки вагона и свойств путепровода) компенсируется изменением величины тока в электромагнитах транспортного средства.
К недостаткам данного способа можно отнести значительное энергопотребление в электромагнитах.
Раскрытие изобретения
Задача, на достижение которой направлено предлагаемое устройство, заключается в устранении упомянутых выше недостатков. Сущность предлагаемой системы состоит в исключении грузонесущей функции электромагнитов и оставлении им только функции коррекции флуктуаций зазора, передав грузонесущую функцию постоянным магнитам. При этом потребляемый ток значительно снижается, т.к. основную часть веса вагона держат постоянные магниты.
Решение задачи настоящего изобретения возможно с помощью комбинированного магнитного подвеса транспортного средства над путепроводом с как минимум одним направляющим ферромагнитным рельсом. В соответствии с изобретением постоянные магниты, выполняющие грузонесущую роль, устанавливают с обеспечением их расположения под ферромагнитным рельсом, а электромагниты, корректирующие величину зазора между транспортным средством и ферромагнитным рельсом (путепроводом), могут быть установлены с обеспечением их расположения над и/или под ферромагнитным рельсом. Постоянные магниты и электромагниты преимущественно жестко соединены между собой и транспортным средством (жесткое соединение постоянных магнитов с транспортным средством обеспечивается с возможностью регулирования силы магнитного взаимодействия постоянного магнита с феррорельсом). Профиль ферромагнитного рельса может быть произвольного (например, прямоугольного) сечения, а сам рельс может называться балкой или монорельсом.
Соответственно, согласно настоящему изобретению, магнитный подвес транспортного средства для путепровода с ферромагнитным рельсом содержит постоянные магниты и электромагниты, установленные с обеспечением возможности притяжения к ферромагнитному рельсу. Постоянные магниты установлены с возможностью регулирования силы притяжения к ферромагнитному рельсу. Положение и/или масса постоянных магнитов может настраиваться перед началом движения под вес транспортного средства.
В одном из вариантов возможность регулирования силы притяжения постоянных магнитов к ферромагнитному рельсу может быть обеспечена возможностью изменения расстояния, на котором постоянные магниты находятся по отношению к ферромагнитному рельсу.
В другом варианте возможность регулирования силы притяжения постоянных магнитов к ферромагнитному рельсу может быть обеспечена возможностью поворота постоянных магнитов по отношению к ферромагнитному рельсу. Для усиления эффекта регулирования вращением постоянные магниты могут быть установлены несимметрично относительно оси вращения.
Постоянные магниты могут представлять собой сборки магнитов и в таком случае возможность регулирования силы притяжения сборок магнитов к ферромагнитному рельсу может быть обеспечена возможностью добавления/исключения магнитов в/из сборок магнитов или даже полной замены сборки магнитов.
Из постоянных магнитов и магнитопроводов могут собираться более сложные магнитные системы. В этом случае возможность регулирования силы притяжения магнитных систем к ферромагнитному рельсу может быть обеспечена возможностью объединения/отделения/шунтирования/перенаправления магнитных потоков магнитов, входящих в состав магнитных систем, с помощью магнитопроводов.
В предпочтительном варианте магнитный подвес в соответствии с изобретением содержит сервоприводы, и/или гидроцилиндры, и/или редукторные передачи, и/или рычажные передачи, обеспечивающие возможностью регулирования силы притяжения постоянных магнитов к ферромагнитному рельсу. Для настройки положения магнитов также могут быть предусмотрены несколько фиксированных положений блока постоянных магнитов относительно транспортного средства.
Задачу настоящего изобретения также решает система регулирования магнитного подвеса по любому из вышеописанных вариантов, которая содержит блок регулирования постоянных магнитов и блок регулирования электромагнитов.
Блок регулирования постоянных магнитов содержит: модуль определения нагрузки постоянных магнитов, выполненный с возможностью определения нагрузки и/или нескомпенсированной нагрузки постоянных магнитов, и модуль регулирования постоянных магнитов, выполненный с возможностью регулирования силы притяжения постоянных магнитов к ферромагнитному рельсу с обеспечением несения постоянными магнитами определенной нагрузки и/или компенсации определенной нескомпенсированной нагрузки постоянных магнитов.
Блок регулирования электромагнитов содержит: модуль определения флуктуации, выполненный с возможностью определения флуктуации зазора между электромагнитом и феррорельсом, и модуль регулирования электромагнита, выполненный с возможностью регулирования силы тока, протекающего через электромагнит, с обеспечением компенсации флуктуации зазора между электромагнитом и феррорельсом.
В одном из вариантов модуль определения нагрузки постоянных магнитов выполнен с возможностью определения нагрузки постоянных магнитов на основе показаний веса нагрузки, а в другом варианте модуль определения нагрузки постоянных магнитов выполнен с возможностью определения нескомпенсированной нагрузки постоянных магнитов на основе величины и/или флуктуации зазора между электромагнитом и феррорельсом.
Модуль определения флуктуации может быть выполнен с возможностью определения флуктуации зазора между электромагнитом и феррорельсом на основе светоотражательного измерения величины зазора или на основе сигнала измерительной катушки.
Задачу настоящего изобретения решает также транспортное средство, предназначенное для перемещения по путепроводу с ферромагнитным рельсом, имеющее магнитный подвес по любому из вышеописанных вариантов и систему регулирования магнитного подвеса по любому из вышеописанных вариантов. Такое транспортное средство в одном из вариантов может иметь колеса, обеспечивающие возможность перемещения без магнитной левитации.
Конфигурацию постоянных магнитов можно настроить перед началом движения под массу конкретного вагона. Тогда электромагниты необходимы только для компенсации флуктуаций зазора при движении. Благодаря этому достигаются такие технические результаты, как снижение энергопотребления, обеспечение безопасности движения транспортного средства, возможность балансировки транспортного средства и другие.
Краткое описание чертежей
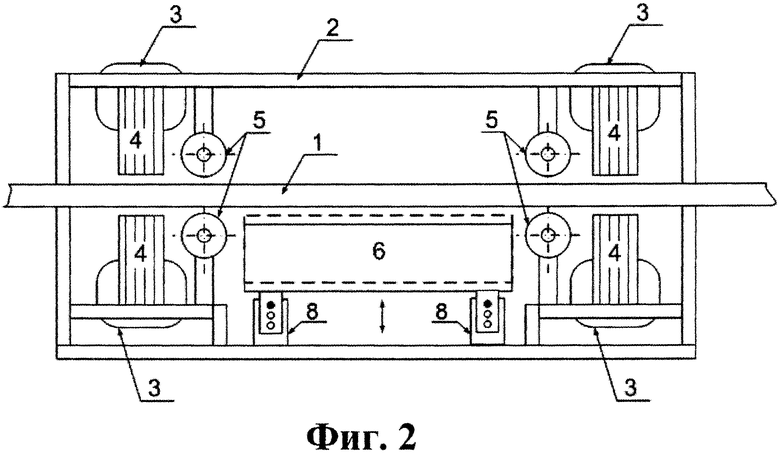
На фиг. 1 приведена схема магнитного подвеса в одном из вариантов.
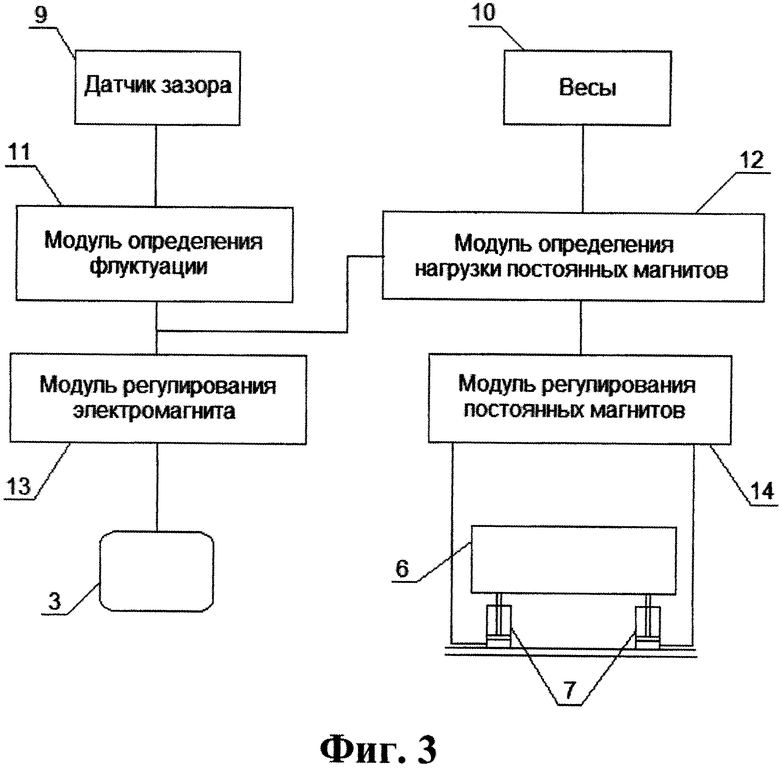
На фиг. 2 приведена схема магнитного подвеса в другом варианте.
На фиг. 3 показана блок-схема системы регулирования магнитного подвеса.
Осуществление изобретения
Настоящее изобретение относится к транспортному средству, предназначенному для перемещения по путепроводу с ферромагнитным рельсом. Ферромагнитный рельс может иметь любую форму, но в одном из предпочтительных вариантов может представлять собой плоскую балку, горизонтально расположенную вдоль путепровода. Выполнение рельса из ферромагнитного материала, например стали, железа, чугуна или других, обеспечивает снижение себестоимости ввиду широкой распространенности железа и низкой себестоимости производства и изготовления из него изделий в больших масштабах, например, в таких, которые требуются для изготовления феррорельса для путепроводов, имеющих протяженности в сотни и тысячи километров. Другим преимуществом применения ферромагнитных материалов является то, что взаимодействие магнитов с феррорельсом может осуществляться как в движении, так и без движения транспортного средства вдоль феррорельса, например, на остановках.
Транспортное средство преимущественно представляет собой поезд, состоящий из одного или более тягового вагона (локомотива) и нескольких вагонов, не имеющих тяговых двигателей, однако в одном из вариантов может состоять из одного вагона с тяговым двигателем. Для повышения характеристик транспортное средство имеет магнитный подвес (подвеску), подробно описываемый ниже, и систему регулирования магнитного подвеса, которая также подробно описывается ниже. В преимущественном варианте транспортное средство имеет обычные колеса, обеспечивающие возможность перемещения без магнитной левитации, например на станциях, при маневровых работах или при регулировке магнитного подвеса.
На фиг. 1 и 2 показана схема комбинированного магнитного подвеса вагона. Вагон перемещается вдоль путепровода с ферромагнитным рельсом 1. В нижней части вагона, в тех местах, которые находятся под ферромагнитным рельсом при расположении вагона в штатном положении в (на) путепроводе, т.е. когда ферромагнитный рельс проходит в нижней части вагона, располагаются постоянные магниты 6 и электромагниты 3. Постоянные магниты 6 устанавливаются так, чтобы они оказывались под ферромагнитным рельсом 1, а электромагниты 3 могут быть установлены в нижней части вагона так, чтобы они оказывались над и/или под ферромагнитным рельсом 1. Магниты могут быть обращены непосредственно к ферромагнитному рельсу 1, как это показано для постоянного магнита 6, или посредством магнитопроводов, как это показано для электромагнитов 3, магнитное поле от которых направляется к феррорельсу 1 с помощью магнитопроводов 4.
Электромагниты 3 смонтированы на опорной раме 2 вагона, которая предпочтительно охватывает феррорельс 1 сбоку. Кассета 6 с постоянными магнитами также устанавливаются на раму 2, однако на фиг. 1 и 2 показано, что это делается посредством регулирующих устройств 7 и 8, соответственно. Устройство 7 имеет в своем составе гидроусилители, которые позволяют регулировать положение магнитов 6 по высоте, а устройство 8 представляет собой опоры с фиксированным набором отверстий для ручной установки магнитов 6 по высоте. В преимущественном варианте подвес имеет колеса 5, которые служат ограничителями перемещения подвеса вагона вверх/вниз относительно феррорельса 1. Верхние колеса служат также для перемещений без применения магнитной левитации.
Минимальное количество постоянных магнитов таково, чтобы поддерживать некоторый «расчетный вес» вагона, например, это может быть вес пустого вагона или средний вес вагона во время эксплуатации. Если вес вагона равен расчетному, вагон поднимается над путепроводом на расчетную высоту зазора вагона над феррорельсом за счет постоянных магнитов, имеющихся в магнитном подвесе.
Если вес вагона больше расчетного, величины пондеромоторных сил не достаточно для обеспечения магнитной левитации. Для того чтобы вагон поднялся над путепроводом на расчетную высоту, включают нижние электромагниты 3 для создания дополнительной подъемной силы.
Если вес вагона меньше расчетного, вагон поднимается над путепроводом выше расчетной высоты зазора. Тогда включают верхние катушки 3 для компенсации избыточной подъемной силы. В преимущественном варианте все магниты, и верхние и нижние, жестко соединены между собой, например, посредством жесткого крепления к раме вагона.
Аналогичный алгоритм действует и для компенсации флуктуаций высоты зазора, неизбежных в ходе движения поезда, например, при поворотах, изменениях высоты расположения феррорельса, воздействий на сам вагон (например, атмосферные осадки, порывы ветра или перемещения груза или пассажиров). Если зазор уменьшился - увеличивают ток в верхних катушках 3 или уменьшают в нижних катушках 3, а если увеличился, поступают противоположным образом. При этом, поскольку система находится в положении неустойчивого равновесия, токи в верхних и нижних магнитах колеблются вокруг нулевых значений, что обеспечивает минимальное энергопотребление. Для обеспечения оптимальной работы тягового двигателя необходимо с высокой точностью выдерживать зазор, причем время реакции на изменение зазора должно составлять порядка 10 мс. Обеспечить такое время реакции с помощью регулировки постоянных магнитов крайне затруднительно. Поэтому устойчивость работы тягового двигателя (фиксированный зазор) обеспечивают именно электромагниты.
Вес вагона меняется при погрузке/выгрузке груза или посадке/высадке пассажиров, например, от 20 т в разгруженном состоянии до 50 т в загруженном состоянии. Кроме того, в зависимости от вида груза и его объема, а также от количества пассажиров нагрузка вагона (в загруженном состоянии) будет меняться от рейса к рейсу. В связи с этим для обеспечения магнитной левитации и безопасного режима необходимо осуществлять регулирование силы магнитного поля, обеспечиваемого магнитным подвесом. Такая регулировка может быть обеспечена с помощью электромагнитов, однако в таком варианте повышается расход электроэнергии, поскольку электромагниты должны быть запитаны постоянным током на протяжении всего пути.
В предпочтительном варианте, предусмотренном настоящим изобретением, подъемная сила магнитного подвеса перед началом движения предварительно настраивается под фактический вес данного вагона с помощью регулирования постоянных магнитов. Тогда электромагниты 3 необходимы только для коррекции флуктуаций величины зазора в ходе движения поезда, и расход электроэнергии и токопотребление значительно снижаются. Регулировку постоянных магнитов возможно осуществлять, изменяя количество и/или положение и/или конфигурацию постоянных магнитов 6.
В одном из вариантов настройка подъемной силы магнитного подвеса может осуществляться регулированием положения постоянных магнитов 6 по высоте относительно феррорельса 1, этот вариант показан на фиг. 1 и 2.
В другом варианте возможность регулирования силы притяжения постоянных магнитов к ферромагнитному рельсу обеспечивается возможностью поворота постоянных магнитов по отношению к ферромагнитному рельсу. Магниты должны поворачиваться таким образом, чтобы происходило изменение направления вектора намагниченности относительно ферромагнитного рельса, поскольку в таком случае будет меняться сила притяжения магнита к феррорельсу.
Для усиления влияния поворота магнита они могут быть установлены несимметрично относительно оси вращения (или ось вращения предусмотрена в стороне от центра масс вращаемого магнита, магнитной сборки или системы). В таком случае при повороте магнита помимо его вращения будет происходить его приближение или удаление к ферромагнитному рельсу. В этом варианте направление вектора намагниченности или его изменение могут не иметь значения.
Удобство применения регулирования с вращением заключается в том, что для его реализации могут применяться, например, шаговые двигатели, редукторы и другие устройства, которые формируют и преобразуют вращательные движения и которые могут быть компактными и компактно расположенными. Кроме того, при расположении магнитов во вращаемых по оси цилиндрах или других телах вращения в регулирующих устройствах могут быть исключены зазоры между вращаемыми элементами и корпусами вообще или зазоры, изменяющиеся по величине, что повысит надежность и срок службы этих устройств, а значит и надежность, и безопасность поезда в целом, ввиду устранения возможности засорения или заполнения этих зазоров вредными, загрязняющими или блокирующими работу веществами или объектами, а также предотвращения проникновения в такие зазоры живых существ.
Кроме того, постоянные магниты могут представлять собой сборки магнитов, и тогда возможность регулирования силы притяжения сборок магнитов к ферромагнитному рельсу обеспечивается возможностью добавлении/исключения магнитов в/из сборок магнитов или замены сборок в целом. Это может упростить способ регулирования и стоимость регулирующих устройств ввиду стандартизации необходимых для этого магнитов и их сборок.
В еще одном варианте постоянные магниты и магнитопроводы собираются в более сложные магнитные системы, а возможность регулирования силы притяжения магнитных систем к ферромагнитному рельсу в таком случае обеспечивается возможностью объединения/отделения/шунтирования/перенаправления магнитных потоков магнитов, входящих в состав магнитных систем, с помощью магнитопроводов. В таком случае возможно получить распределенные магнитные системы, которые могут располагаться не концентрированно, а на большем пространстве, что упрощает проектирование и изготовление таких систем и поезда в целом. Кроме того, применение таких магнитных систем дает больше возможностей, точности и гибкости в автоматизации регулирования.
С целью обеспечения возможности регулирования силы притяжения постоянных магнитов к ферромагнитному рельсу магнитный подвес может содержать сервоприводы, и/или гидроцилиндры, и/или редукторные передачи, и/или рычажные передачи, которые обеспечивают возможность обеспечения и автоматизации дистанционного регулирования, однако в некоторых вариантах осуществления такая регулировка может осуществляться вручную, что делает систему проще и дешевле.
Для регулирования магнитного подвеса в период подготовки к поездке и в движении в вагоне предпочтительно предусматривается система регулирования магнитного подвеса, один из возможных вариантов выполнения которой показан на фиг. 3. Такая система регулирования может содержать блок регулирования постоянных магнитов и блок регулирования электромагнитов.
Блок регулирования постоянных магнитов в предпочтительном варианте осуществления содержит:
- модуль 12 определения нагрузки постоянных магнитов, выполненный с возможностью определения нагрузки и/или нескомпенсированной части нагрузки постоянных магнитов, и
- модуль 14 регулирования постоянных магнитов, выполненный с возможностью регулирования силы притяжения постоянных магнитов 6 к ферромагнитному рельсу путем управления регулирующими средствами, например, гидроцилиндрами 7, с обеспечением подъема постоянными магнитами определенной нагрузки и/или компенсации определенной нескомпенсированной части нагрузки.
Блок регулирования электромагнитов в предпочтительном варианте содержит:
- модуль 11 определения флуктуации, выполненный с возможностью определения флуктуации зазора между электромагнитом и феррорельсом, и
- модуль 13 регулирования электромагнита, выполненный с возможностью регулирования силы тока, протекающего через электромагнит 3, с обеспечением компенсации флуктуации зазора между электромагнитом и феррорельсом.
Модуль 12 определения нагрузки постоянных магнитов может определять нагрузки (величины нагрузки) постоянных магнитов на основе показаний весов 10, показывающих вес вагона (перевозимой нагрузки), который также может быть установлен, например, расчетным путем или с помощью таблиц, которые могут быть определены с помощью вычислений или экспериментальным образом.
В одном из вариантов модуль 12 определения нагрузки постоянных магнитов может определять нескомпенсированную нагрузку постоянных магнитов на основе величины и/или флуктуации зазора между электромагнитом и феррорельсом. В этом варианте в модуль 12 определения нагрузки постоянных магнитов подается сигнал из модуля 11 определения флуктуации (как показано на фиг. 3) или модуля 13 регулирования электромагнита, из которого выделяется постоянная составляющая (или постоянная составляющая может подаваться непосредственно из указанных модулей), и на основе этой постоянной составляющей регулируются постоянные магниты, поскольку указанная постоянная составляющая отражает нескомпенсированную постоянными магнитами нагрузку, которая и может быть скомпенсирована регулировкой постоянных магнитов. Это позволяет отказаться от применения весов, которые с учетом веса вагона могут быть весьма сложными и громоздкими, и осуществлять компенсацию веса адаптивным способом. Например, модуль 11 определения флуктуации или сам модуль 12 определения нагрузки постоянных магнитов по сигналу из датчика 9 зазора при постепенно увеличивающейся силе притяжения постоянных магнитов 6 к ферррельсу, обеспечиваемому соответствующим управлением исполнительных механизмов, регулирующих положение постоянных магнитов, могут определять момент отрыва вагона от феррорельса или путепровода и начала левитации и/или достижения заданного положения в левитирующем состоянии.
Модуль 11 определения флуктуации может определять флуктуации зазора между электромагнитом и феррорельсом на основе светоотражательного измерения величины зазора, на основе сигнала измерительной катушки (которая, в том числе, улавливает и наводимое в феррорельсе магнитного подвеса магнитное поле) или с помощью других датчиков 9 зазора.
Показанные на блок-схеме на фиг. 3 соединения даны лишь для примера, возможны и другие конфигурации. Модули/блоки могут быть объединены, заменены или разделены на другие элементы. Они могут быть выполнены аппаратно, программно или аппаратно-программным образом. Обработка данных может быть аналоговой или цифровой, могут осуществляться все необходимые виды преобразования сигналов по виду, величине, форме, знаку и другим параметрам. Система регулирования может быть выполнена из отдельных компонентов, микросхем или программируемых устройств, в том числе компьютеров, контроллеров и т.п.
Использование постоянных магнитов на принципе притяжения к феррорельсу приводит к неустойчивым системам. Действительно, отклонения от положения равновесия (увеличение или уменьшение зазора) необходимо приведут к тому, что вагон либо опустится на путепровод, либо зафиксируется на феррорельсе. Однако, если в дополнение к постоянным магнитам установить электромагниты, аналогичные используемым в прототипе, то появляется возможность оперативного регулирования величины зазора, как и в прототипе. При этом, как показывают расчеты, потребляемый катушками ток существенно снижается.
Предлагаемая система работает следующим образом. Имеется путепровод, вдоль которого перемещается поезд. Путепровод включает специальный ферромагнитный рельс. При каждом вагоне имеются постоянные магниты, которые притягиваются как минимум к одному ферромагнитному рельсу. Сила притяжения постоянных магнитов такова, чтобы обеспечить левитацию вагона. Дополнительно к постоянным магнитам имеются электромагнитные катушки, закрепленные как над феррорельсом, так и под ним для компенсации флуктуаций зазора по отношению к ферромагнитному рельсу (зазор может отсчитываться от любого элемента, имеющего постоянное положение относительно вагона). Тяговый двигатель поезда разгоняет поезд до заданной скорости, преодолевая только сопротивление воздуха и силу электродинамического торможения, которая в данном случае имеет малую величину.
В том случае, когда регулирование силы притяжения постоянных магнитов, например их положение или ориентация, регулируется с помощью, например, вышеуказанных механизмов или устройств, которые могут управляться с помощью сигналов от системы (устройства) регулирования, регулирование силы притяжения постоянных магнитов может осуществляться адаптивно. Например, в том случае, когда поезд входит в поворот (затяжной или короткий), появляется центробежная сила, которая будет наклонять вагоны и соответственно нагрузка на одну сторону будет больше, чем на другую. Это изменение баланса нагрузки может отрабатываться (компенсироваться) с помощью электромагнитов, однако в случае затяжных поворотов это может привести к дополнительным расходам энергии на запитку электромагнитов, в то время как модуль регулирования постоянных магнитов мог бы изменить силы притяжения постоянных магнитов с разных сторон поезда и, тем самым, обеспечить балансировку вагона в поперечном движению поезда направлении (в случае движения с перепадами высоты может регулироваться баланс и в продольном направлении).
Такое регулирование может быть выполнено автоматическим. В том случае, если из регулирующего тока электромагнитов (или сигнала, управляющего регулирующими током, или показаний датчика) выделить постоянную составляющую (за определенный промежуток времени, который может соотноситься, например, со временем реакции регулирующих постоянные магниты устройств), то эта постоянная составляющая может быть компенсирована с помощью регулирования силы притяжения постоянных магнитов, причем регулироваться таким образом может как увеличение нагрузки, так и ее уменьшение.
Таким образом, при входе в поворот на одной стороне вагона у электромагнитов начинает появляться постоянная составляющая. В результате определения этой составляющей изменяется сила притяжения постоянных магнитов и в результате у электромагнитов отпадает необходимость компенсировать такое долговременное изменение нагрузки и токопотребление снижается.
Поскольку поезда двигаются по постоянным и известным маршрутам, то регулирование постоянных магнитов, их силы притяжения, может осуществляться по заранее определенным распределениям нагрузок на протяжении маршрута, которые могут быть получены в ходе калибровочных поездок с разными скоростями. Тогда на основании скорости и/или местоположения, которые могут определяться по датчикам, например, ГЛОНАСС/GPS, расположенных в каждом вагоне (при этом обеспечивается автономность и резервирование показаний датчиков, что приводит к повышению надежности и безопасности работы системы регулирования и подвеса в целом) и/или в одном из вагонов и/или локомотиве (в этом случае обеспечивается снижение себестоимости системы регулирования и упрощение разработки и изготовления), может определяться текущая или предсказываться последующая через заданный промежуток времени (который может быть связан со временем отклика регулирующих устройств) нагрузка и соответственно регулироваться сила притяжения постоянных магнитов к ферромагнитному рельсу.
Регулирование электромагнитов также может осуществляться на основе показаний датчиков положения/скорости и калибровочных замеров, однако электромагниты предпочтительно регулировать в автоматическом режиме, обеспечивающем отклик на действительные флуктуации, а не замеренные ранее, поскольку ферромагнитный рельс (и путепровод в целом) под воздействием внешних и внутренних фактором может непредсказуемо изменять свое местоположение, геометрию и т.п. (например, в результате нагрева или охлаждения под воздействием температуры окружающей среды, под влиянием ветра или ураганов, под повторяющимся воздействием проезжающих поездов, в результате процессов старения, вследствие случайных происшествий или умышленных действий вандалов и т.п.), в связи с чем для обеспечения безопасности и надежности поездов на магнитном подвесе предпочтительно слежение за фактической ситуацией.
На основе этих данных о текущей ситуации (исходя из сигналов датчиков и/или модулей регулирования электромагнитов) могут собираться, передаваться, копироваться и обрабатываться данные мониторинга за состоянием ферромагнитного рельса и путепровода (это может осуществляться, например, системой регулирования или другими устройствами или модулями), что позволит предсказывать и/или предупреждать персонал (например, диспетчеров, машинистов) и/или управляющие системы дороги или поездов о случившихся и/или ожидаемых изменениях ферромагнитного рельса и путепровода, что позволит соответствующим образом реагировать и проводить плановые и/или предупредительные ремонты. Это дополнительно повысит безопасность, надежность и срок эксплуатации путепровода, феррорельса, магнитного подвеса, вагонов и локомотивов.
Приведенные в описании примеры реализации даны лишь в пояснительных целях и могут изменяться, дополняться или исключаться любым образом в пределах объема охраны, определяемого формулой изобретения. Все признаки могут сочетаться в любых комбинациях и последовательностях, применяться вместе или по отдельности таким образом, чтобы обеспечить решение задачи настоящего изобретения и достижение технического результата, а также получение преимуществ, относящихся к отдельным признакам, которые также могут считаться соответствующими дополнительными техническими результатами.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА С КОРРЕКЦИЕЙ ПОДЪЕМНОЙ СИЛЫ | 2015 |
|
RU2611858C1 |
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ КОМБИНИРОВАННОГО ПУТЕПРОВОДА | 2014 |
|
RU2573135C1 |
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2779326C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2786679C2 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2739939C1 |
| УСТРОЙСТВО РАЗГРУЗКИ ТРАНСПОРТНЫХ КОЛЕС С ГИБРИДНЫМИ МАГНИТАМИ | 2023 |
|
RU2816415C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ КОМБИНИРОВАННОГО ПОДВЕСА И ВЫСОКОСКОРОСТНОЙ МАГНИТОЛЕВИТАЦИОННЫЙ ТРАНСПОРТ С КОМБИНИРОВАННЫМ ПОДВЕСОМ, ФУНКЦИОНИРУЮЩИМ В СООТВЕТСТВИИ С ТАКИМ СПОСОБОМ | 2022 |
|
RU2782389C1 |
| ГИБРИДНЫЙ МАГНИТ БЕЗ ПОЛЕЙ РАССЕЯНИЯ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2743753C1 |
| СВЕРХПРОВОДЯЩЕЕ ЭЛЕКТРОМАГНИТНОЕ УСТРОЙСТВО, МАГНИТНЫЙ ПОДВЕС И ТРАНСПОРТНОЕ СРЕДСТВО, СНАБЖЕННЫЕ ТАКИМ УСТРОЙСТВОМ | 2014 |
|
RU2566507C1 |
| ЭНЕРГОСБЕРЕГАЮЩЕЕ УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ ТРАНСПОРТНЫХ КОЛЕС НА ОСНОВЕ КОМБИНИРОВАННОГО МАГНИТА | 2023 |
|
RU2833489C2 |
Группа изобретений относится к области железнодорожного транспорта на магнитной подушке. Магнитный подвес транспортного средства для путепровода с ферромагнитным рельсом содержит постоянные магниты и электромагниты, установленные с возможностью поворота постоянных магнитов по отношению к ферромагнитному рельсу сервоприводами, и/или гидроцилиндрами, и/или редукторными передачами, и/или рычажными передачами, и/или несколькими фиксированными положениями постоянных магнитов относительно транспортного средства. Система регулирования магнитного подвеса содержит блок регулирования постоянных магнитов и блок регулирования электромагнитов, модуль определения нагрузки постоянных магнитов, модуль регулирования постоянных магнитов и модуль определения флуктуации. Достигается повышение эффективности работы и безопасности движения транспортного средства. 3 н. и 10 з.п. ф-лы, 3 ил.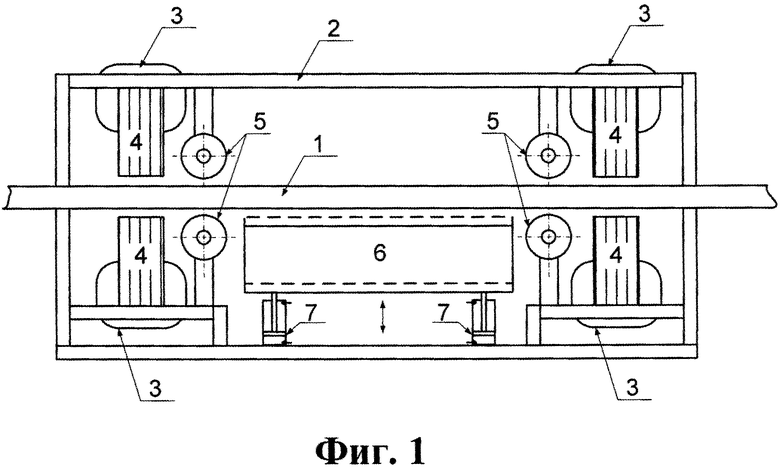
1. Магнитный подвес транспортного средства для путепровода с ферромагнитным рельсом произвольного поперечного профиля, содержащий постоянные магниты и электромагниты, установленные с обеспечением возможности притяжения к ферромагнитному рельсу, причем постоянные магниты установлены с возможностью регулирования силы притяжения к ферромагнитному рельсу.
2. Подвес по п. 1, отличающийся тем, что постоянные магниты установлены с обеспечением их расположения под ферромагнитным рельсом, а электромагниты установлены с обеспечением их расположения над и/или под ферромагнитным рельсом при нахождении транспортного средства в путепроводе.
3. Подвес по п. 1, отличающийся тем, что возможность регулирования силы притяжения постоянных магнитов к ферромагнитному рельсу обеспечена возможностью изменения расстояния, на котором постоянные магниты находятся по отношению к ферромагнитному рельсу.
4. Подвес по п. 1, отличающийся тем, что возможность регулирования силы притяжения постоянных магнитов к ферромагнитному рельсу обеспечена возможностью поворота постоянных магнитов по отношению к ферромагнитному рельсу.
5. Подвес по п. 4, отличающийся тем, что постоянные магниты расположены несимметрично относительно оси вращения.
6. Подвес по п. 1, отличающийся тем, что постоянные магниты представляют собой сборки магнитов и возможность регулирования силы притяжения сборок магнитов к ферромагнитному рельсу обеспечена возможностью добавлении/исключения магнитов в/из сборок магнитов или заменой всей сборки.
7. Подвес по п. 1, отличающийся тем, что постоянные магниты представляют собой магнитные системы, состоящие из нескольких магнитов и магнитопроводов, причем возможность регулирования силы притяжения магнитных систем к ферромагнитному рельсу обеспечена возможностью объединения/отделения/шунтирования/перенаправления магнитных потоков магнитов, входящих в состав магнитных систем, с помощью магнитопроводов.
8. Подвес по п. 1, отличающийся тем, что содержит сервоприводы и/или гидроцилиндры и/или редукторные передачи и/или рычажные передачи и/или несколько фиксированных положений постоянных магнитов относительно транспортного средства, обеспечивающие возможностью регулирования силы притяжения постоянных магнитов к ферромагнитному рельсу.
9. Система регулирования магнитного подвеса по любому из пунктов 1-8, содержащая блок регулирования постоянных магнитов и блок регулирования электромагнитов,
причем блок регулирования постоянных магнитов содержит:
модуль определения нагрузки постоянных магнитов, выполненный с возможностью определения нагрузки и/или нескомпенсированной нагрузки постоянных магнитов, и
модуль регулирования постоянных магнитов, выполненный с возможностью регулирования силы притяжения постоянных магнитов к ферромагнитному рельсу с обеспечением несения постоянными магнитами определенной нагрузки и/или компенсации определенной нескомпенсированной нагрузки постоянных магнитов,
причем блок регулирования электромагнитов содержит:
модуль определения флуктуации, выполненный с возможностью определения флуктуации зазора между электромагнитом и феррорельсом, и
модуль регулирования электромагнита, выполненный с возможностью регулирования силы тока, протекающего через электромагнит, с обеспечением компенсации флуктуации зазора между электромагнитом и феррорельсом.
10. Система по п. 9, отличающаяся тем, что модуль определения нагрузки постоянных магнитов выполнен с возможностью определения нагрузки постоянных магнитов на основе показаний веса нагрузки.
11. Система по п. 9, отличающаяся тем, что модуль определения нагрузки постоянных магнитов выполнен с возможностью определения нескомпенсированной нагрузки постоянных магнитов на основе величины и/или флуктуации зазора между электромагнитом и феррорельсом.
12. Система по п. 9, отличающаяся тем, что модуль определения флуктуации выполнен с возможностью определения флуктуации зазора между электромагнитом и феррорельсом на основе светоотражательного измерения величины зазора.
13. Система по п. 9, отличающаяся тем, что модуль определения флуктуации выполнен с возможностью определения флуктуации зазора между электромагнитом и феррорельсом на основе сигнала измерительной катушки.
14. Транспортное средство, предназначенное для перемещения по путепроводу с ферромагнитным рельсом, имеющее магнитный подвес по любому из пунктов 1-8 и систему регулирования магнитного подвеса по любому из пунктов 9-13.
15. Транспортное средство по п. 14, отличающееся тем, что имеет колеса, обеспечивающие возможность перемещения без магнитной левитации.
| ЛЕВИТАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2037436C1 |
| ЛЕВИТАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2037436C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ С ИСПОЛЬЗОВАНИЕМ МАГНИТНОЙ ОПОРЫ | 2010 |
|
RU2520827C2 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ СИСТЕМ ЭЛЕКТРОМАГНИТНОГО ПОДВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1984 |
|
SU1232019A1 |
| US 7533616 B2, 19.05.2009 | |||
| Устройство для управления магнитным подвесом транспортного средства | 1989 |
|
SU1812143A1 |

