Изобретение относится к вычислительной технике и может быть использовано для корректировки параметров видеокамер при их производстве или для позиционирования видеокамеры, работающей в составе системы технического зрения.
Известна оптикоэлектронная система распознавания и ориентации образов (Патент США 4435837, МКИ G 06 K 9/32), состоящая из видеокамеры, микропроцессорного контроллера и блока ориентации видеокамеры. Недостатком этой системы является работа только с плоскими объектами, что снижает область ее применения.
Наиболее близким к предлагаемому является двумерное оптическое устройство, реализующее функцию автоматической установки видимой области и повышающее точность измерения путем использования только одной видеокамеры, снабженной контроллером, который осуществляет управление зуммером до тех пор, пока не будет достигнуто заданное значение координат (Япония. Заявка 60-146374, МКИ G 06 K 9/32, 9/20), содержащее видеокамеру, системный контроллер, главную часть, зуммер.
Недостатком данного устройства является низкая скорость калибровки.
Технической задачей изобретения является повышение скорости калибровки.
Техническая задача решается тем, что в устройство, содержащее видеокамеру и системный контроллер, введены блок ориентации, блок управления и блок ввода изображения, причем выход видеокамеры подключен ко входу блока ввода изображения, выход которого соединен со входом системного контроллера, чьи входы-выходы соединены с первой группой соответствующих входов-выходов блока управления, вторая группа входов-выходов которого соединена с соответствующими входами-выходами блока ориентации.
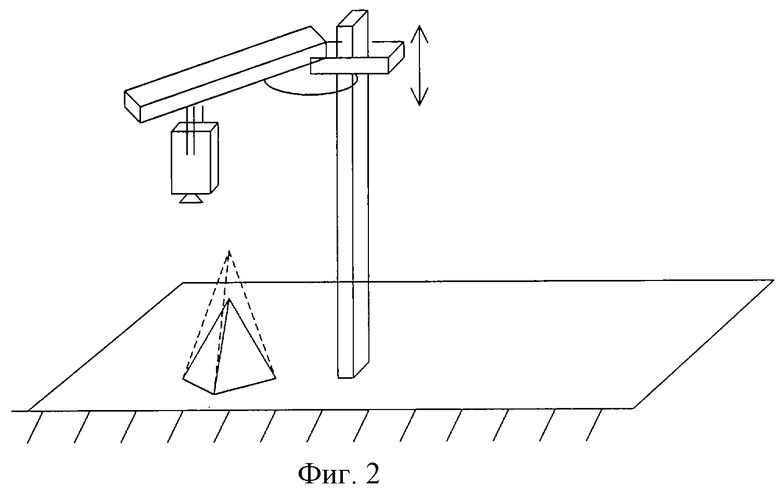
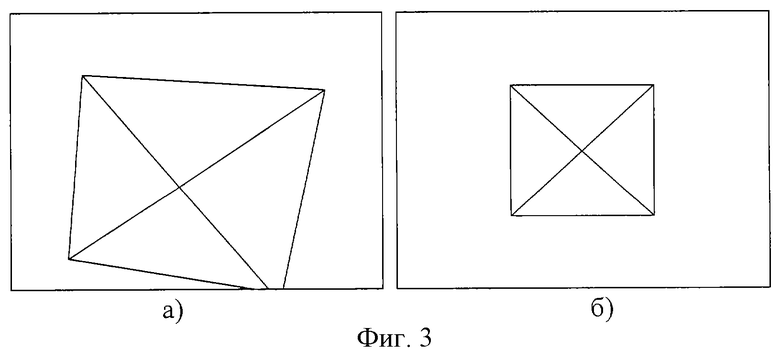
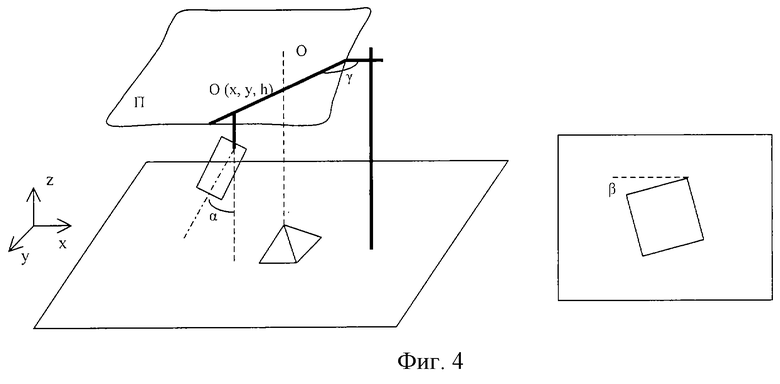
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема устройства, на фиг.2 - взаимное расположение видеокамеры и эталонного объекта, на фиг.3 - изображения эталонного объекта, на фиг.4 показаны вычисляемые параметры.
Устройство содержит (фиг.1) видеокамеру 1, блок ввода изображения 2, системный контроллер 3, блок управления 4 и блок ориентации 5, причем выход видеокамеры 1 подключен ко входу блока ввода изображения 2, выход которого соединен со входом системного контроллера 3, чьи входы-выходы соединены с первой группой соответствующих входов-выходов блока управления 4, вторая группа входов-выходов которого соединена с соответствующими входами-выходами блока ориентации 5.
Эталонным объектом является пирамида (фиг.2), обладающая следующими свойствами: основанием является квадрат, "верхняя" вершина проецируется в точку пересечения диагоналей основания, грани пирамиды окрашены в два разных контрастных цвета (использовался черный и белый) так, что противоположные грани имеют одинаковый цвет. Пирамида устанавливается на ровную поверхность однородного цвета, отличного от двух, использованных в пирамиде, в местоположении, где предполагается нахождение исследуемого объекта при дальнейшем использовании оптикоэлектронной системы, или же произвольно, в случае нахождения внутренних параметров видеокамеры 1. Видеокамера 1 крепится на горизонтальной направляющей, по которой перемещается прямолинейно. Кроме того, видеокамера 1 вращается относительно своей оси в горизонтальной плоскости (фиг. 4, угол β) и поворачивается относительно своей точки крепления к горизонтальной направляющей в вертикальной плоскости (фиг.4, угол α). Горизонтальная направляющая закреплена на вертикальной направляющей (фиг.2) и вращается в горизонтальной плоскости (фиг.4, угол γ). Таким образом, параметрами, определяющими расположение видеокамеры 1 над пирамидой, являются:
смещение точки O (х, у), определяемое величинами х и у, относительно точки О' в горизонтальной плоскости П и высота h видеокамеры 1 над плоскостью стола (фиг.4);
углы поворота видеокамеры 1 в горизонтальной (β) и вертикальной (α) плоскостях;
угол поворота горизонтальной направляющей в горизонтальной плоскости (γ);
смещение видеокамеры относительно начала горизонтальной направляющей d (фиг.4).
Параметры γ и d необходимы для ориентации камеры в пространстве, но взаимное расположение видеокамеры 1 и эталонного объекта задают параметры х и у, которые выражаются через γ и d:
x = d • sin(γ),
y = d • cos(γ).
Устройство работает следующим образом. Изображение эталонного объекта (или того места в пространстве, где предполагается его нахождение) поступает с видеокамеры 1 через блок ввода изображения 2 на системный контроллер 3, где изображение обрабатывается и по изображению (фиг.3) находятся параметры (х, у, h, α, β, γ, d). Калибровка состоит из двух основных действий на каждом шаге: определение положения видеокамеры 1 относительно эталонного объекта и последующая переориентация видеокамеры 1 с учетом найденных значений. В начале калибровки рассчитываются смещение точки O (х, у) (фиг.4) относительно О' в горизонтальной плоскости П и высота h над плоскостью стола, углы поворота видеокамеры 1 относительно своей оси в горизонтальной (β) и вертикальной (α) плоскостях.
После того как отклонения найдены, их значения с системного контроллера 3 передаются на блок ориентации 4. Выполнение программы системным контроллером 3 приостанавливается до тех пор, пока от блока ориентации 5 через блок управления 4 не поступит сигнал, уведомляющий о переориентации видеокамеры 1. Блок управления 4 формирует сигналы, необходимые для управления двигателями, входящими в состав блока ориентации 5. Блок ориентации 5 путем механического воздействия, оказываемого на видеокамеру 1, изменяет ее положение в пространстве. После переориентации видеокамеры 1 блок ориентации 5 посылает сигнал готовности на блок управления 4, который в свою очередь посылает сигнал готовности на системный контроллер 3. Далее на системный контроллер 3 вновь поступает изображение эталонного объекта, по которому вычисляются параметры х, у, h, α, β, γ, d. В случае наличия отклонений, превосходящих заданные, процесс переориентации видеокамеры 1 повторяется. Иначе дополнительно корректируются оставшиеся небольшие отклонения, после чего калибровка считается завершенной. Таким образом, обратная связь осуществляется по двум каналам - по изображению эталонного объекта и через блок управления 4.
Предлагаемое решение позволяет настроить оптикоэлектронную систему для работы с объемными объектами, т.е., кроме необходимого расположения видеокамеры в пространстве, подстроить фокус, а также сократить время калибровки оптикоэлектронной системы.
Изобретение относится к устройствам позиционирования видеокамеры. Его применение для корректировки параметров видеокамер при их производстве или для позиционирования видеокамеры, работающей в составе системы технического зрения, позволяет получить технический результат в виде повышения скорости калибровки. Этот результат достигается благодаря тому, что в устройство калибровки оптикоэлектронной системы, содержащее видеокамеру и системный контроллер, введены блок ориентации, блок управления, блок ввода изображения и логическая схема, а калибровка видеокамеры осуществляется путем вычисления параметров расположения видеокамеры в пространстве относительно эталонного объекта и последующей ее переориентацией. 4 ил.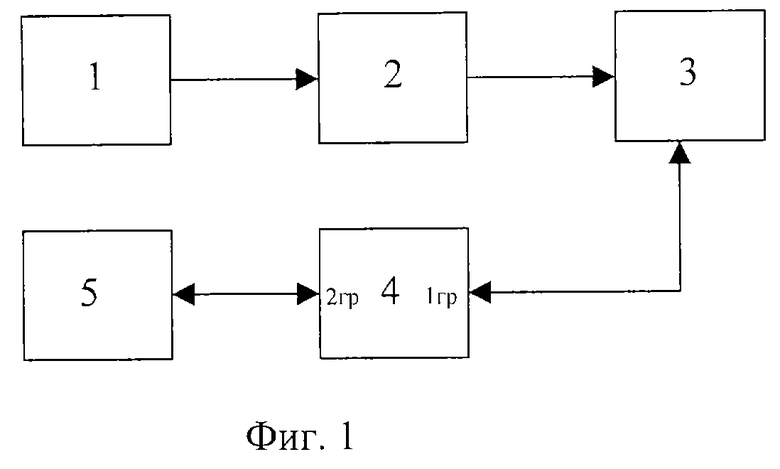
Устройство калибровки оптикоэлектронной системы, содержащее видеокамеру и системный контроллер, отличающееся тем, что в него введены блок ориентации, блок управления и блок ввода изображения, причем выход видеокамеры подключен ко входу блока ввода изображения, выход которого соединен со входом системного контроллера, чьи входы-выходы соединены с первой группой соответствующих входов-выходов блока управления, вторая группа входов-выходов которого соединена с соответствующими входами-выходами блока ориентации.
| RU 98117235 A1, 20.07.2000 | |||
| US 5083073 А, 21.01.1992 | |||
| US 5576547 А, 19.11.1996 | |||
| US 5049796 А, 17.09.1991. |
