Изобретение относится к вычислительной технике и может быть использовано для корректировки параметров видеокамер при их производстве или для позиционирования видеокамеры, работающей в составе системы технического зрения.
Известна оптико-электронная система распознавания и ориентации образов (Патент США №4435837, МПК7 G 06 K 9/32), состоящая из видеокамеры, микропроцессорного контроллера и блока ориентации видеокамеры. Недостатком этой системы является работа только с плоскими объектами, что снижает область ее применения.
Наиболее близким к предлагаемому является двумерное оптическое устройство, реализующее функцию автоматической установки видимой области и повышающее точность измерения путем использования видеокамеры, снабженной контроллером, который осуществляет управление зуммером до тех пор, пока не будет достигнуто заданного значения координат (Япония. Заявка №60-146374, МПК7 G 06 K 9/32, 9/20), содержащее видеокамеру, системный контроллер, главную часть, зуммер.
Недостатком данного устройства является низкая скорость калибровки из-за использования системного контроллера, в состав которого входит микропроцессор, выполняющий операции по заданной программе последовательно.
Технической задачей изобретения является повышение скорости калибровки за счет аппаратного выполнения нескольких операций одновременно.
Техническая задача решается тем, что в устройство, содержащее видеокамеру, введены эталонный объект, блок ориентации, блок управления, блок бинаризации изображения и логическая схема, состоящая из блока сравнения, двух триггеров, двух регистров, трех счетчиков.
Изобретение может быть использовано для корректировки параметров видеокамер при их производстве или для позиционирования видеокамеры, работающей в составе системы технического зрения.
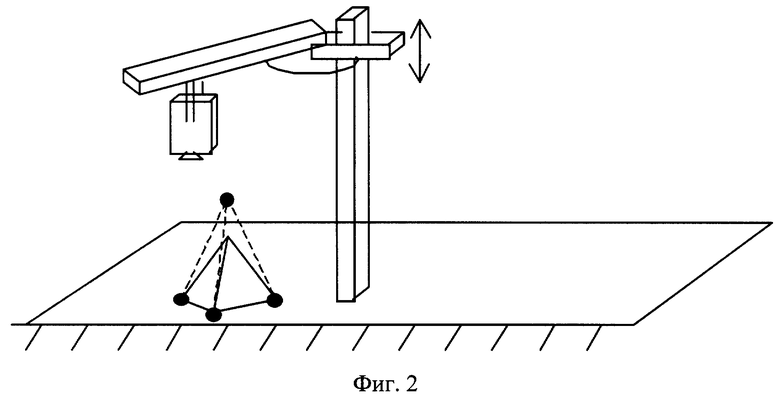
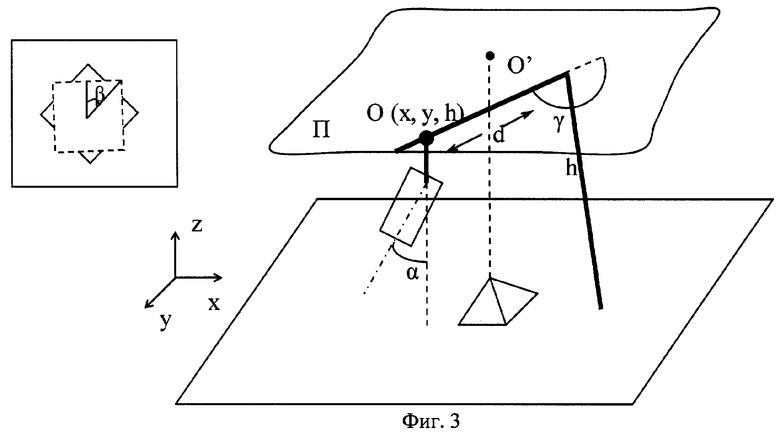
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема устройства, на фиг.2 - взаимное расположение видеокамеры и эталонного объекта, на фиг.3 - геометрические параметры калибровки, на фиг.4 - временные диаграммы, на фиг.5 - источник излучения, находящийся в центре кадра, на фиг.6 - эталонный объект посла калибровки.
Устройство содержит (фиг.1) эталонный объект 1, видеокамеру 2, блок бинаризации изображения 3, блок управления 12, блок ориентации 13, логическую схему 14, состоящую из первого счетчика 4, блока сравнения 5, первого триггера 6, второго триггера 7, второго счетчика 9, третьего счетчика 8, первого регистра 10, второго регистра 11, причем выход видеокамеры 2 подключен к первому входу блока бинаризации изображения 3, первый выход блока бинаризации изображения 3 подключен ко входу разрешения первого счетчика 4, второй выход блока бинаризации изображения 3 подключен ко входу сброса третьего счетчика 8 и к счетному входу второго счетчика 9, третий выход блока бинаризации изображения 3 подключен ко входу сброса третьего счетчика 8 и к счетному входу первого счетчика 4, четвертый выход блока бинаризации изображения 3 подключен к пятому входу блока управления 12, ко входу сброса первого счетчика 4, к счетному входу первого триггера 6 и к счетному входу второго триггера 7, выход первого счетчика 4 подключен к первому входу блока сравнения 5, на второй вход блока сравнения 5 подается константа, равная единице, первый выход блока сравнения 5 подключен к информационному входу первого триггера 6, второй выход блока сравнения 5 подключен к информационному входу второго триггера 7, третий выход блока сравнения 5 подключен к счетному входу первого регистра 10 и к счетному входу второго регистра 11, выход первого триггера 6 подключен к первому входу блока управления 12, выход второго триггера 7 подключен ко второму входу блока управления 12, выход второго счетчика 9 подключен к информационному входу первого регистра 10, выход третьего счетчика 8 подключен к информационному входу второго регистра 11, выход первого регистра 10 подключен к третьему входу блока управления 12, выход второго регистра 11 подключен к четвертому входу блока управления 12, чей первый выход подключен ко второму входу блока бинаризации изображения 3, второй выход блока управления 12 подключен ко входу блока ориентации 13, первый выход блока ориентации 13 подключен к шестому входу блока управления 12, второй выход блока ориентации 13 подключен ко входу видеокамеры 2.
Эталонным объектом 1 является пирамида (фиг.2), обладающая следующими свойствами: основанием является квадрат, верхняя вершина проецируется в точку пересечения диагоналей основания, в вершинах пирамиды установлены источники излучения, имеющие малые геометрические размеры (например, светодиоды или лампы накаливания СМН-6.3). Пирамида устанавливается на поверхность в местоположении, где предполагается нахождение исследуемого объекта при дальнейшем использовании оптико-электронной системы, или же произвольно, в случае нахождения внутренних параметров видеокамеры 2. Видеокамера 2 крепится на горизонтальной направляющей, по которой перемещается прямолинейно. Кроме того, видеокамера 2 вращается относительно своей оптической оси в горизонтальной плоскости (фиг.3, угол β) и поворачивается относительно своей точки крепления к горизонтальной направляющей в вертикальной плоскости (фиг.3, угол α). Горизонтальная направляющая закреплена на вертикальной направляющей (фиг.2) и вращается в горизонтальной плоскости (фиг.3, угол γ). Таким образом, параметрами, определяющими расположение видеокамеры 2 над эталонным объектом 1, являются:
смещение точки O(х, у), определяемое величинами х и у, относительно точки О' в горизонтальной плоскости П, и высота h видеокамеры 2 над плоскостью стола (фиг.3);
углы поворота видеокамеры 2 в горизонтальной (β) и вертикальной (α) плоскостях;
угол поворота горизонтальной направляющей в горизонтальной плоскости (γ);
смещение видеокамеры 2 относительно начала горизонтальной направляющей d (фиг.3).
Параметры γ и d необходимы для ориентации видеокамеры 2 в пространстве, но взаимное расположение видеокамеры 2 и эталонного объекта 1 задают параметры х и у, которые выражаются через γ и d:
х=d*sin (γ),
у=d*cos (γ).
Устройство работает следующим образом. Изображение эталонного объекта 1 поступает с видеокамеры 2 через блок бинаризации изображения 3 на логическую схему 14, где изображение обрабатывается, и в зависимости от изображения генерируются сигналы, определяющие изменение положения видеокамеры 2 в пространстве.
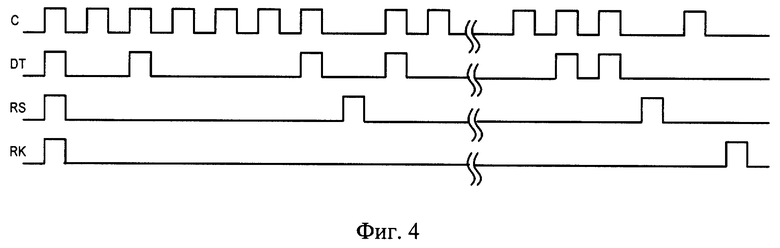
Блок бинаризации изображения 3 начинает работать после прихода кадрового (фиг.4, RK) и первого строчного (фиг.4, RS) импульсов.
Первый счетчик 4 подсчитывает количество единичных пикселей в кадре. В результате на выходе первого счетчика 4 формируется число, соответствующее числу единичных пикселей в кадре. С выхода первого счетчика 4 на первый вход блока сравнения 5 поступает количество единичных пикселей в кадре, на второй вход блока сравнения 5 подается константа, равная единице. На первом, втором и третьем выходах блока сравнения 5 формируется единичное состояние, соответствующее значениям меньше, больше или равно единице соответственно. Состояния выходов больше и меньше единицы с блока управления 5 по кадровому импульсу (фиг.4, RK) записываются в первый и второй триггеры 6 и 7.
Далее с выходов первого и второго триггеров 6 и 7 информация о количестве единичных пикселей поступает на первый и второй входы блока управления 12 соответственно, который, в случае, если количество единичных пикселей больше одного, производит уменьшение яркости источника излучения, или повышает порог бинаризации блока бинаризации изображения 3. В случае, если количество единичных пикселей меньше одного, блок управления 12 производит увеличение яркости источника излучения или понижает порог бинаризации блока бинаризации изображения 3.
Определение координат единичного пикселя осуществляется вторым счетчиком 9, первым регистром 10, третьим счетчиком 8 и вторым регистром 11.
На счетный вход второго счетчика 9 со второго выхода блока бинаризации изображения 3 подается строчный импульс (фиг.4, RS), а с четвертого выхода блока бинаризации изображения 3 на вход сброса второго счетчика 9 подается кадровый импульс (фиг.4, RK). Второй счетчик 9 определяет номер строки, в которой содержится единичный пиксель.
На счетный вход третьего счетчика 8 с третьего выхода блока бинаризации изображения 3 поступает сигнал синхронизации (фиг.4, С), а со второго выхода блока бинаризации изображения 3 на вход сброса третьего счетчика 8 подается строчный импульс (фиг.4, RS). Третий счетчик 8 определяет номер позиции единичного пикселя в строке.
С выхода второго счетчика 9 в первый регистр 10 импульсом, поступающим с третьего выхода блока сравнения 5, записывается координата строки, содержащей единичный пиксель. С выхода третьего счетчика 8 импульсом, поступающим с третьего выхода блока сравнения 5, во второй регистр 11 записывается координата столбца, содержащего единичный пиксель.
На выходе первого регистра 10 фиксируется координата единичного пикселя по горизонтали, на выходе второго регистра 11 - по вертикали.
Далее с выхода первого регистра 10 координата по горизонтали поступает на третий вход блока управления 12, с выхода второго регистра 11 координата по вертикали поступает на четвертый вход блока управления 12. После чего блоком управления 12 происходят определение положения видеокамеры 2 относительно эталонного объекта 1 и последующая переориентация видеокамеры 2 блоком ориентации 13 с учетом найденных значений. В начале калибровки рассчитываются угол поворота горизонтальной направляющей в горизонтальной плоскости γ (фиг.3), смещение видеокамеры 2 относительно начала горизонтальной направляющей d (фиг.3) и высота h видеокамеры 2 над плоскостью стола (фиг.3).
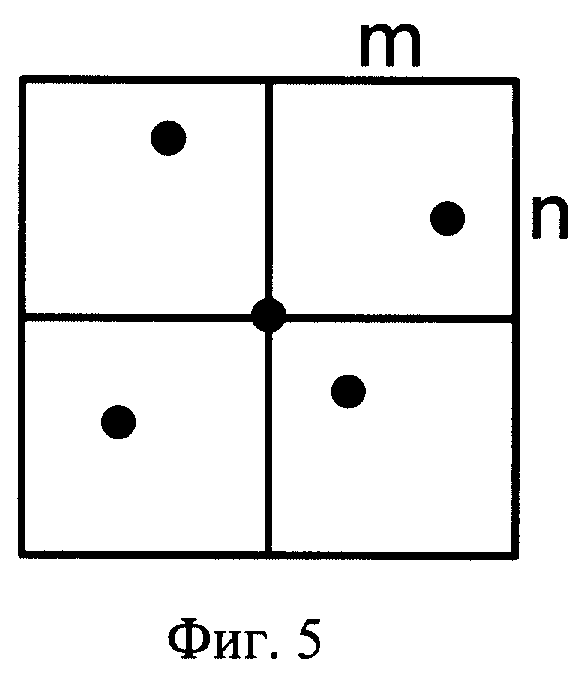
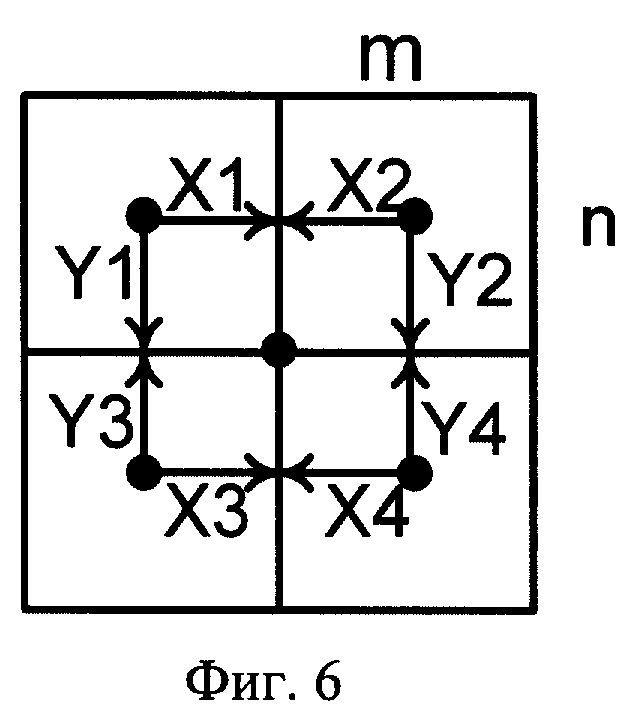
Процедура определения координат источника излучения, находящегося в вершине эталонного объекта 1, повторяется до тех пор, пока источник излучения не будет находиться в центре кадра, т.е. координата этого источника не будет равна m/2 n/2, где m и n - ширина и длина кадра, соответственно (фиг.5).
Определение координат четырех источников излучения, находящихся в основании эталонного объекта 1, происходит последовательного и аналогично определению координат единичного пикселя, соответствующего верхнему источнику излучения, но без смещения видеокамеры 2.
После определения координат всех источников излучения, находящихся в основании эталонного объекта 1, блок управления 12 рассчитывает необходимое смещение видеокамеры 2 в пространстве и передает его блоку ориентации 13, который изменяет положение видеокамеры 2 в пространстве. После изменения положения видеокамеры 2 в пространстве происходит повторное определение координат источника излучения, находящегося в вершине эталонного объекта 1.
Рассмотрим ориентацию видеокамеры 2 в пространстве на примере эталонного объекта 1.
Пусть камера 2 находится над эталонным объектом 1, оптическая ось проходит через вершину пирамиды, координаты вершин источников излучения, находящихся в основании эталонного объекта 1, расположены в соответствующих каждому из них квадрантах. Значение координаты источника излучения, находящегося в первом квадранте, меньше m/2 и меньше n/2; значение координаты источника излучения, находящегося во втором квадранте, больше m/2 и меньше n/2; значение координаты источника излучения, находящегося в третьем квадранте, меньше m/2 больше n/2; значение координаты источника излучения, находящегося в четвертом квадранте, больше m/2 и больше n/2 (фиг.5).
После переориентации видеокамеры 2 нахождение координат всех источников излучения повторяется до тех пор, пока расстояния X1, Х2, Х3, Х4 не будут равны между собой, расстояния Y1, Y2, Y3, Y4 не будут равны между собой, где X1, Х2, Х3, Х4 и Y1, Y2, Y3, Y4 - расстояния от источника излучения до соответствующей стороны квадранта (фиг.6), определяемые заранее.
Блок ориентации может быть построен на базе сервомоторов постоянного тока с инкрементными оптическими шифраторами, применяемыми в манипуляторе ПУМА/VS-100 («Техническое зрение роботов» / Под ред. А.Пью; Пер. с англ. Д.Ф.Миронова; Под ред. Г.П.Катыса. - М.: Машиностроение, 1987. - 380 с.: ил.).
В качестве блока управления может быть использовано устройство управления робота ПУМА/VS-100, описанное в книге «Техническое зрение роботов» / Под ред. А.Пью; Пер. с англ. Д.Ф.Миронова; Под ред. Г.П.Катыса. - М.: Машиностроение, 1987. - 380 с.: ил. На стр.285 приводится краткое описание: «Каждая модель серии ПУМА имеет собственное устройство управления. Эти устройства строятся на базе ЭВМ фирмы «Диджитал Экуипмент» LSI-11.... Сервосистема каждого из звеньев состоит из микропроцессора и усилителя мощности. Каждый микропроцессор получает от ЭВМ LSI-11 значения угла поворота управляемого им звена и выступает в роли регулятора замкнутого цикла управления».
Блок бинаризации предназначен не только для разбиения пикселов на «черный» и «белый», но также и для ввода бинаризованного изображения в логическую схему. В справочнике «Системы технического зрения» (Системы технического зрения: Справочник / В.И.Сырямкин, B.C.Титов. Ю.Г.Якушенков и др. // Под общей ред. В.И.Сырямкина, B.C.Титова. Томск: МГП «РАСКО», 1992. 367 с.: ил.) на стр.113-117 в гл. 3.7 «Устройства ввода изображений в микроЭВМ» приведен вариант реализации буферного запоминающего устройства, считывающего контурное изображения (рис. 3.26). Хотя эта схема рассчитана для ввода изображения в ЭВМ (на схеме показаны входы-выходы ССМ (схема связи с микрокомпьютером)), она может быть использована для ввода бинаризованного изображения в логическую схему. В общем случае блок бинаризации содержит устройство ввода изображения и компаратор, который осуществляет бинаризацию изображения по порогу, задаваемому на входе блока бинаризации изображения.
Очевидно, что для реализации логической схемы необходимо большое количество логических вентилей. Данному требованию отвечают современные программируемые логические схемы (ПЛИС), обладающие большим быстродействием по сравнению с микропроцессорами (Методы компьютерной обработки изображений. / Под ред. В.А.Сойфера. - М.: Физматлит., 2001 г.).
Предлагаемое решение позволяет повысить скорость работы устройства калибровки ОЭС за счет использования логической схемы, а также настроить ОЭС для работы с объемными объектами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ВЫСОКОГО РАЗРЕШЕНИЯ | 1996 |
|
RU2127961C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| Устройство для подсчета молоди рыб в потоке воды | 1983 |
|
SU1125639A1 |
| СИСТЕМА АСТРОНАВИГАЦИИ | 2013 |
|
RU2548927C1 |
| Устройство для лазерной обработки деталей | 1989 |
|
SU1682096A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ АДАПТИВНОЙ ТРЕХМЕРНОЙ КАЛИБРОВКИ БИНОКУЛЯРНОЙ СИСТЕМЫ ТЕХНИЧЕСКОГО ЗРЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2250498C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ПО ИХ КОНТУРАМ | 1992 |
|
RU2060551C1 |
| Устройство для определения координат центра изображения объекта | 1988 |
|
SU1580409A1 |
| CПОСОБ АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2528140C1 |
| Устройство обнаружения и определения координат объекта на изображении | 1990 |
|
SU1737755A1 |
Изобретение относится к вычислительной технике и может быть использовано для корректировки параметров видеокамер при их производстве или для позиционирования видеокамеры, работающей в составе системы технического зрения. Техническим результатом является повышение скорости калибровки за счет аппаратного выполнения нескольких операций одновременно. В устройство, содержащее видеокамеру, введены эталонный объект, блок ориентации, блок управления, блок бинаризации изображения и логическая схема. Изобретение позволяет корректировать параметры видеокамер при их производстве или позиционировать видеокамеры, работающие в составе системы технического зрения. 6 ил.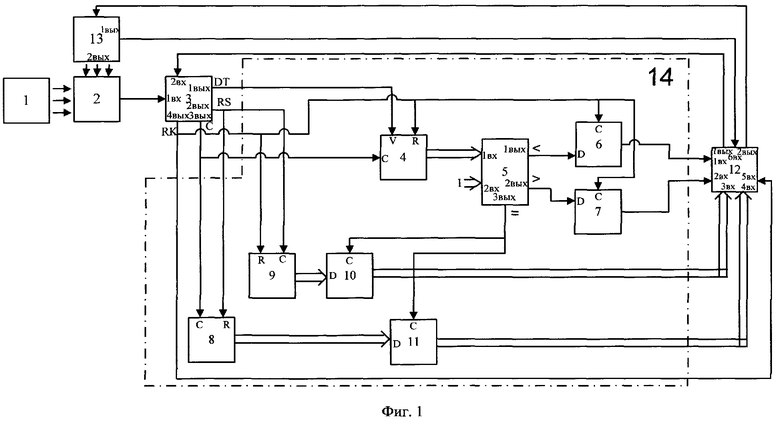
Устройство калибровки оптико-электронной системы, содержащее видеокамеру, отличающееся тем, что в него введены эталонный объект, блок бинаризации изображения, блок управления, блок ориентации, логическая схема, состоящая из блока сравнения, двух триггеров, двух регистров, трех счетчиков, причем выход видеокамеры подключен к первому входу блока бинаризации изображения, первый выход блока бинаризации изображения подключен ко входу разрешения первого счетчика, второй выход блока бинаризации изображения подключен ко входу сброса третьего счетчика и к счетному входу второго счетчика, третий выход блока бинаризации изображения подключен ко входу сброса третьего счетчика и к счетному входу первого счетчика, четвертый выход блока бинаризации изображения подключен к пятому входу блока управления, ко входу сброса первого счетчика, к счетному входу первого триггера и к счетному входу второго триггера, выход первого счетчика подключен к первому входу блока сравнения, на второй вход блока сравнения подается константа, равная единице, первый выход блока сравнения подключен к информационному входу первого триггера, второй выход блока сравнения подключен к информационному входу второго триггера, третий выход блока сравнения подключен к счетному входу первого регистра и к счетному входу второго регистра, выход первого триггера подключен к первому входу блока управления, выход второго триггера подключен ко второму входу блока управления, выход второго счетчика подключен к информационному входу первого регистра, выход третьего счетчика подключен к информационному входу второго регистра, выход первого регистра подключен к третьему входу блока управления, выход второго регистра подключен к четвертому входу блока управления, первый выход блока управления подключен ко второму входу блока бинаризации изображения, второй выход блока управления подключен ко входу блока ориентации, первый выход блока ориентации подключен к шестому входу блока управления, второй выход блока ориентации подключен ко входу видеокамеры.
| УСТРОЙСТВО КАЛИБРОВКИ ОПТИКОЭЛЕКТРОННОЙ СИСТЕМЫ | 2001 |
|
RU2199150C2 |
| JP 60146374, 02.08.1985 | |||
| Устройство задания частоты вращения вала двигателя | 1986 |
|
SU1343067A1 |
| US 5930740, 27.07.1999. | |||

